Изобретение относится к области радиотехники, в частности к способам квазикогерентного приема сигнала в системах связи с кодовым разделением каналов, и может использоваться в приемных устройствах базовой и мобильной (абонентской) станций.
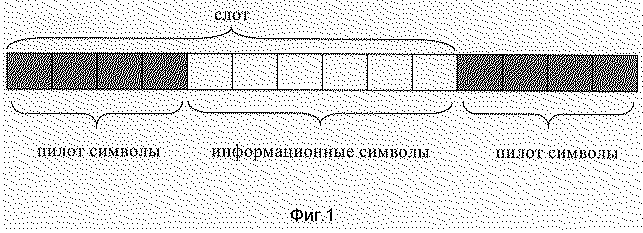
Принимаемый сигнал представляет собой MPSK- или MQAM-сигнал с расширяющей кодовой псевдослучайной последовательностью (ПСП), прошедший через многолучевой канал связи и наблюдаемый на фоне шумов. Полезный сигнал подвержен замираниям (федингу), в общем случае независимым в каждом луче канала распространения. Частота фединга, определяемая частотой несущей и скоростью движения мобильной станции, может быть значительной. Передаваемое сообщение представляет собой последовательность информационных символов. В эту последовательность периодически вставляются группы известных пилот-символов, предназначенные для оценки канала. Такую совокупность пилот-символов будем называть прерывистым пилот-сигналом. Передаваемый поток символов может быть сгруппирован по слотам, представляющим собой некоторую совокупность информационных символов и пилот-символов. Пример слотовой структуры данных представлен на фиг.1. При прерывистом пилот-сигнале задача организации квазикогерентного приема для широкого диапазона возможных значений скорости передачи информации в условиях многолучевого канала связи с высокочастотным федингом становится нетривиальной.
Известен способ квазикогерентного приема с восстановлением несущей методом интерполяции по оценкам комплексной огибающей полезного сигнала, полученным по пилот-группам каждого слота, описанный в статье. К. Ohno, M. Sawahashi and F. Adachi. "Wideband coherent DS-CDMA," IEEE, VTC'95, pp.779-783, 1995. Этот способ заключается в формировании усредненных величин комплексной огибающей по пилот-символам каждого слота, после чего осуществляют интерполяцию комплексной огибающей сигнала для информационной части каждого слота по двум ближайшим усредненным величинам комплексной огибающей. Результаты интерполяции используют для оценки информационных символов слота.
Однако указанный способ может быть применен не для всех скоростей движения абонентской станции, а только для тех, при которых комплексная огибающая сигнала сильно коррелирована по крайней мере в течение одного слота. Одним из требований современных стандартов сотовой связи является поддержка связи с абонентом, перемещающимся со скоростью до 500 км/ч. При подобных скоростях движения абонента использовать этот метод невозможно, поскольку условие его применимости не выполняется. В этом случае точность восстановления несущей, а значит, и качество демодуляции явно неудовлетворительные.
Известен способ квазикогерентного приема, описанный в Р.Y. Kam, P. Sihna and A. M. С. Kan "Adaptive digital Coherent Receiver for MPSK," Electronics Letters, vol.28, no.22, pp.2099-2101, Oct. 1992. В данной статье описывается цифровой когерентный приемник MPSK-сигнала. Он использует алгоритм формирования оценки несущей входного сигнала, основанный на принципе решающей обратной связи. Значение несущей демодулируемого символа получают посредством фильтрации оценок комплексной огибающей, соответствующих предыдущим символам, которые к этому моменту уже оценены или известны. Оценки комплексной огибающей входного сигнала информационных символов и пилот-символов получают умножением соответствующих корреляционных откликов на комплексно-сопряженные оценки информационных символов или значения пилот-символов.
Недостатком такого способа приема является негативное влияние ошибочно оцененных информационных символов на восстановление несущей при демодуляции последующих символов. В результате вероятность ошибки при приеме символа возрастает по мере удаления от известных пилот-символов, что обуславливает достаточно высокую среднюю вероятность битовой ошибки. Другой недостаток приведенного способа обусловлен тем, что для восстановления несущей используется прогноз, точность которого ниже по сравнению с точностью интерполяции.
Наиболее близким к предлагаемому решению является метод квазикогерентного многолучевого приема и устройство для его реализации с блоком обработки, приведенные в статье S. Abeta, М. Sawahashi and F. Adachi, "Performance comparison between time-multiplexed pilot channel and parallel pilot channel for coherent rake combining is DS-CDMA mobile radio," IEICE Trans. Commun., vol.E81-B, no.7, pp.1417-1425, July 1998. Здесь многолучевой приемник состоит из нескольких однолучевых приемников, которые вырабатывают мягкие решения об информационных символах. Объединение мягких решений производят в соответствии с критерием максимизации отношения сигнал/шум на выходе приемника.
Описанный способ заключается в следующем.
При приеме сигнала каждого луча производят следующие операции:
- Формируют последовательность корреляционных откликов, определяя корреляцию входных отсчетов с известной ПСП на интервалах длительности каждого символа.
- Отбирают корреляционные отклики пилот-символов из общего потока корреляционных откликов символов.
- Получают усредненные отклики, суммируя корреляционные отклики, соответствующие пилот-символам каждого слота.
- оценивают значения комплексной огибающей информационных символов методом интерполяции, формируя взвешенную сумму усредненных откликов.
- Получают мягкие решения об информационных символах, используя оценки комплексной огибающей информационных символов.
Получают объединенное мягкое решение об информационных символах, объединяя мягкие решения всех лучей.
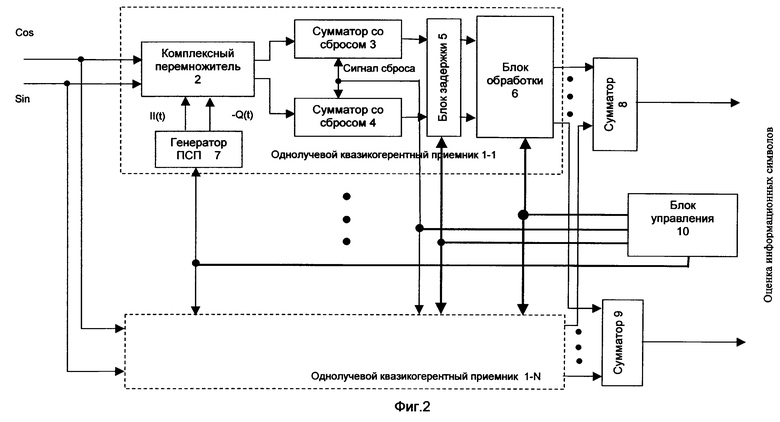
Для реализации такого способа используется устройство, представленное на фиг.2, где обозначено:
1 - однолучевые квазикогерентные приемники,
2 - комплексный перемножитель,
3, 4 - первый и второй сумматоры со сбросом,
5 - блок задержки,
6 - блок обработки,
7 - генератор ПСП,
8, 9 - первый и второй сумматоры,
10 - блок управления.
Устройство квазикогерентного приема многолучевого сигнала содержит N однолучевых квазикогерентных приемников 1-1 - 1-N, N -число лучей. Каждый из N однолучевых квазикогерентных приемников 1-1 - 1-N содержит комплексный перемножитель 2, первый и второй входы которого являются входами квазикогерентного приемника, а третий и четвертый входы комплексного перемножителя 2 соединены с выходами генератора псевдослучайных последовательностей 7. Первый и второй выходы комплексного перемножителя 2 соединены соответственно с первым и вторым сумматорами со сбросом 3 и 4, входы сигнала сброса которых в каждом однолучевом квазикогерентном приемнике 1-1 - 1-N соединены с первым выходом блока управления 10, а выходы первого и второго сумматоров со сбросом 3 и 4 соединены с первым и вторым входами блока задержки 5, третий вход которого является входом управления временем задержки и соединен с четвертым выходом блока управления 10. Первый и второй выходы блока задержки 5 соединены с первым и вторым входами блока обработки сигнала 6. Первый и второй выходы блоков обработки сигнала 6 всех N однолучевых квазикогерентных приемников 1-1 - 1-N соединены со входами первого и второго сумматоров 8, 9, имеющих по N входов. С выходов первого и второго сумматоров 8 и 9 получают оценку информационных символов. Второй выход блока управления 10 соединен со входом генератора ПСП 7 каждого квазикогерентного приемника, третий выход блока управления 10 соединен с третьим входом блоков обработки сигнала 6 всех N однолучевых квазикогерентных приемников 1-1 - 1-N.
Работает устройство-прототип следующим образом.
Синфазная и квадратурная составляющие входного сигнала поступают в однолучевые приемники 1-1 - 1-N, а именно на первый и второй входы комплексных перемножителей 2. На третий и четвертый входы перемножителей 2 с выходов генератора ПСП 7 поступают известные ПСП, соответствующие синфазной и квадратурной составляющим сигнала. Состояниями генератора ПСП 7 управляет блок управления 10 в соответствии со значениями временных положений сигналов лучей в принимаемом многолучевом сигнале. Синфазная и квадратурная составляющие сигнала с выходов комплексного перемножителя 2 поступают соответственно на входы сумматоров со сбросом 3 и 4, на вторые входы которых поступает управляющий сигнал сброса из блока управления 10. Сумматоры со сбросом 3, 4 осуществляют операцию посимвольного накопления синфазных и квадратурных составляющих входного сигнала. С выходов первого и второго сумматоров 3 и 4 сигналы, представляющие собой корреляционные отклики символов, поступают через блок задержки 5 на первый и второй входы блока обработки сигнала 6. Временем задержки сигнала в блоке 5 управляет блок управления 10 в соответствии со значениями временных положений сигналов лучей в принимаемом многолучевом сигнале так, чтобы корреляционные отклики соответствующих символов всех лучей приходили на блок обработки сигнала 6 одновременно. Выходные сигналы блока обработки сигнала 6 являются одновременно выходными сигналами соответствующего однолучевого приемника 1 и представляют собой мягкие решения об информационных символах. С первого и второго выходов блока обработки 6 каждого однолучевого квазикогерентного приемника 1-I,  мягкие решения об информационных символах поступают на I-е входы первого и второго сумматоров 8 и 9. В сумматорах 8 и 9 мягкие решения всех однолучевых приемников объединяются, а именно суммируются. Выходные сигналы многолучевого квазикогерентного устройства поступают с выходов сумматоров 8 и 9 и представляют собой оценки информационных символов. Блок управления 10 обеспечивает синхронность работы блоков приемника.
мягкие решения об информационных символах поступают на I-е входы первого и второго сумматоров 8 и 9. В сумматорах 8 и 9 мягкие решения всех однолучевых приемников объединяются, а именно суммируются. Выходные сигналы многолучевого квазикогерентного устройства поступают с выходов сумматоров 8 и 9 и представляют собой оценки информационных символов. Блок управления 10 обеспечивает синхронность работы блоков приемника.
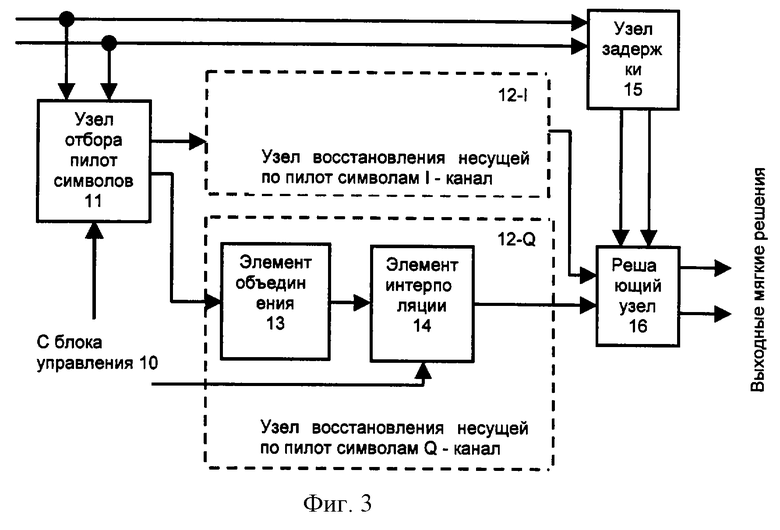
Блок обработки сигнала для устройства-прототипа, приведенный в статье S. Abeta, M. Sawahashi and F. Adachi, "Performance comparison between time-multiplexed pilot channel and parallel pilot channel for coherent rake combining is DS-CDMA mobile radio," IEICE Trans. Commun., vol.E81-B, no.7, pp. 1417-1425, July 1998, представлен на фиг.3, где обозначено:
11 - узел отбора пилот-символов,
12 - I- и Q-узлы восстановления несущей по пилот-символам,
13 - элемент объединения,
14 - элемент интерполяции,
15 - узел задержки,
16 - решающий узел.
Первый и второй входы узла отбора пилот-символов 11 объединены с первым и вторым входами узла задержки 15, являются входами блока обработки сигнала 6 и соединены с выходами первого и второго сумматоров со сбросом 3 и 4. Первый и второй выходы узла отбора пилот-символов 11 соединены с I- и Q-узлами восстановления несущей по пилот-символам 12. Каждый из I- и Q-узлов восстановления несущей по пилот-символам 12 содержит последовательно соединенные элемент объединения 13, вход которого соединен с выходом узла отбора пилот-символов 11, и элемент интерполяции 14, второй вход которого является управляющим и соединен с выходом блока управления 10. Выходы элементов интерполяции 14 I- и Q-узлов восстановления несущей по пилот-символам 12 соединены соответственно с первым и вторым входами решающего узла 16, третий и четвертый входы которого соединены с первым и вторым выходами узла задержки 15.
Работает блок обработки в устройстве-прототипе следующим образом.
На вход блока обработки сигнала 6 поступает дискретный комплексный сигнал, представляющий собой корреляционные отклики, соответствующие пилот-символам и информационным символам. Восстановление несущей производится в узлах 12-I, 12-Q по корреляционным откликам, соответствующим пилот-символам. Узлы восстановления несущей по пилот-символам 12-I, 12-Q обрабатывают соответственно синфазные и квадратурные составляющие входного дискретного комплексного сигнала. В соответствии с управляющим (синхронизирующим) сигналом узел отбора пилот-символов 11 из входной последовательности корреляционных откликов пилот-символов и информационных символов пропускает только отклики пилот-символов. С выходов узла отбора пилот-символов 11 синфазные и квадратурные составляющие этих откликов поступают на первый и второй входы элементов объединения 13 пилот-откликов узлов 12-I, 12-Q, где корреляционные отклики, соответствующие пилот-символам каждого слота, суммируются. Далее объединенные отклики пилот-символов поступают в элемент интерполяции 14, где осуществляется интерполяция комплексной огибающей информационных символов. Интерполяция выполняется посредством взвешенного суммирования профильтрованных откликов пилот-символов. Весовые коэффициенты интерполяции устанавливаются в соответствии с управляющим (синхронизирующим) сигналом блока управления 10. Восстановленные значения синфазной и квадратурной составляющих комплексной огибающей информационных символов с выходов элементов 14 узлов 12-I, 12-Q поступают на первый и второй входы решающего узла 16, на третий и четвертый входы которого поступают синфазные и квадратурные составляющие комплексных корреляционных откликов символов, задержанные в узле задержки 15. Задержка комплексных корреляционных откликов символов необходима для компенсации временной задержки при восстановлении комплексной огибающей сигнала в узлах 12-I, 12-Q. В решающем узле 16 формируются мягкие решения об информационных символах путем перемножения комплексных корреляционных откликов информационных символов на комплексно-сопряженные значения восстановленной комплексной огибающей.
К недостаткам данных способа и устройства квазикогерентного многолучевого приема следует отнести отказ от использования информационных корреляционных откликов для восстановления несущей, а также отсутствие адаптации к статистике фединга. Указанные недостатки обуславливают недостаточно высокую точность демодуляции особенно в условиях высокочастотного фединга.
Особенность некоторых известных алгоритмов восстановления несущей состоит в том, что комплексная огибающая полезного сигнала рассматривается, как некоторая неизвестная гладкая комплексная функция. При этом не учитывается случайный характер этой функции и ее статистические свойства. Между тем, учет этих статистических свойств должен существенно улучшить качество квазикогерентного приема.
Подход в предлагаемом изобретении основан на предположении о линейном характере статистической зависимости синфазной и квадратурной составляющих комплексной огибающей полезного сигнала и использовании интерполирования или прогноза комплексной огибающей сигнала по методу наименьших квадратов (МНК). В предлагаемом подходе для восстановления несущей предполагается использование информационных символов.
Задача, которую решает предлагаемое изобретение, - повышение помехоустойчивости приема сигналов с прерывистым пилот-сигналом при различных скоростях передачи информации и различных статистиках канала (фединга) с целью увеличения емкости системы связи.
Для решения этой задачи в способ квазикогерентного приема многолучевого сигнала, при котором входной сигнал содержит информационные символы и пилот-символы, мультиплексированные во времени друг с другом, заключающийся в том, что при приеме сигнала каждого луча формируют последовательность корреляционных откликов символов, определяя корреляцию входных отсчетов с известной псевдослучайной последовательностью на интервалах длительности каждого символа, отбирают корреляционные отклики пилот-символов из общего потока корреляционных откликов символов, оценивают значения комплексной огибающей информационных символов по корреляционным откликам пилот-символов, получают мягкие решения об информационных символах, используя оценки комплексной огибающей информационных символов, объединяют мягкие решения об информационных символах всех лучей,
дополнительно введены следующие операции:
при приеме сигнала каждого луча
- получают оценку автокорреляционной функции синфазной и квадратурной составляющих комплексной огибающей символов,
- определяют весовые коэффициенты фильтрации и интерполяции или прогноза, используя оценку автокорреляционной функции синфазной и квадратурной составляющих комплексной огибающей символов,
- фильтруют корреляционные отклики пилот-символов,
для каждой группы информационных символов получают в L этапов мягкие решения об информационных символах, причем на каждом этапе
- выделяют подгруппу информационных символов, состоящую из одного или нескольких информационных символов, не входящих в подгруппы информационных символов предыдущих этапов,
- принимают жесткие решения об информационных символах подгруппы предыдущего этапа,
для сигнала каждого луча
- формируют оценки комплексной огибающей информационных символов предыдущего этапа, умножая корреляционные отклики каждого информационного символа предыдущего этапа на комплексно-сопряженные жесткие решения об этих информационных символах,
- оценивают значения комплексной огибающей информационных символов текущего этапа, используя профильтрованные корреляционные отклики пилот-символов, оценки комплексной огибающей информационных символов предыдущих этапов и рассчитанные ранее весовые коэффициенты,
- получают мягкие решения об информационных символах текущего этапа, используя оценки комплексной огибающей этих символов,
объединяют мягкие решения об информационных символах всех лучей, результат объединения принимают за окончательные мягкие решения об информационных символах текущего этапа, подгруппа последнего этапа состоит из информационных символов, не вошедших в предыдущие подгруппы.
Причем оценку комплексной огибающей информационных символов производят, например, методом стохастической интерполяции или прогноза, формируя взвешенную сумму профильтрованных корреляционных откликов пилот-символов и оценок комплексной огибающей демодулированных ранее информационных символов с весовыми коэффициентами, адаптивными к статистике канала.
Группа информационных символов - это информационные символы, расположенные, например, между смежными пилот-символами.
Мягкие решения об информационных символах можно получать путем умножения корреляционных откликов каждого информационного символа на нормированные комплексно-сопряженные оценки комплексных огибающих этих символов.
Формирование оценки автокорреляционной функции синфазной и квадратурной составляющих комплексной огибающей символов производят по корреляционным откликам пилот-символов для доступных значений аргумента непосредственно, а для остальных значений аргумента - посредством интерполяции, например, по методу наименьших квадратов.
Для решения этой же задачи в устройство квазикогерентного приема многолучевого сигнала, содержащее N однолучевых квазикогерентных приемника, каждый из которых содержит комплексный перемножитель, первый и второй входы которого являются входами квазикогерентного приемника, а третий и четвертый входы комплексного перемножителя соединены с выходами генератора псевдослучайных последовательностей, вход генератора ПСП каждого квазикогерентного приемника соединен с первым выходом блока управления, первый и второй выходы комплексного перемножителя соединены соответственно с первым и вторым сумматорами со сбросом, входы сигнала сброса которых каждого однолучевого квазикогерентного приемника соединены со вторым выходом блока управления, а выходы первого и второго сумматоров со сбросом соединены с первым и вторым входами блока задержки, третий вход которого является входом управления временем задержки и соединен с третьим выходом блока управления, первый и второй выходы блока задержки соединены с первым и вторым входами блока обработки, первый и второй выходы блоков обработки всех N однолучевых квазикогерентных приемников соединены со входами первого и второго сумматоров, имеющих по N входов, четвертый выход блока управления соединен с третьим входом блоков обработки всех N однолучевых квазикогерентных приемников,
дополнительно введены:
- первый и второй решающие блоки, причем входы первого и второго решающих блоков соединены соответственно с выходами первого и второго сумматоров, выходы которых также являются выходами устройства, выход первого решающего блока соединен с четвертым входом блока обработки каждого из N однолучевых квазикогерентных приемников, выход второго решающего блока соединен с пятым входом блока обработки каждого из N однолучевых квазикогерентных приемников.
Для решения задачи повышения помехоустойчивости приема сигналов с прерывистым пилот-сигналом при различных скоростях передачи информации и различных федингах в блок обработки однолучевого квазикогерентного приемника, содержащий узлы восстановления несущей I- и Q-каналов, решающий узел, узел задержки, узел отбора пилот-символов, первый и второй входы которого объединены с первым и вторым входами узла задержки и являются входами блока обработки, третий вход узла отбора пилот-символов является входом управления, первый и второй выходы узла отбора пилот-символов соединены с узлами восстановления несущей I- и Q-каналов, выходы которых соединены с первым и вторым входами решающего узла, выходы которого являются выходами блока обработки, каждый из узлов восстановления несущей I- и Q-каналов содержит элемент интерполяции, один из входов которого является входом управления, а выход является выходом узла восстановления несущей I- и Q-каналов,
дополнительно введены:
- узел адаптивной оценки весовых коэффициентов фильтрации и интерполяции или прогноза, узел памяти, узел снятия информации, в каждый из узлов восстановления несущей I- и Q-каналов введены коммутатор и элемент фильтрации, вход которого является входом узла восстановления несущей, первый и второй выходы узла задержки соединены соответственно с первым и вторым входами узла памяти, третий вход которого является управляющим, первый и второй выходы узла памяти соединены с первым и вторым входами узла снятия информации и с третьим и четвертым входами решающего узла, выходы узла снятия информации соединены со входами коммутаторов каждого узлами восстановления несущей I- и Q-каналов, вторые входы которых являются управляющими, первый и второй входы узла адаптивной оценки весовых коэффициентов фильтрации и интерполяции или прогноза соединены с первым и вторым выходами узла отбора пилот-символов, первый выход узла адаптивной оценки весовых коэффициентов фильтрации и интерполяции или прогноза соединен со вторым входом элемента фильтрации узла восстановления несущей I- и Q-каналов, второй выход узла адаптивной оценки весовых коэффициентов фильтрации и интерполяции или прогноза соединен со вторым входом элемента интерполяции узлов восстановления несущей по пилот-символам I- и Q-каналов, причем выход элемента фильтрации соединен со входом элемента интерполяции, Р входов которого соединены с выходами коммутатора.
Элемент интерполяции содержит линию задержки, состоящую из Р последовательно соединенных элементов задержки, Р перемножителей, элемент управления и элемент суммирования, причем вход первого элемента задержки линии задержки соединен с выходом элемента фильтрации и первым выходом коммутатора, второй выход коммутатора соединен со входом второго элемента задержки и первым входом первого перемножителя, Р-й выход коммутатора соединен со входом Р-го элемента задержки и первым входом Р-1-го перемножителя, выход Р-го элемента задержки линии задержки соединен с первым входом Р-го перемножителя, вторые входы перемножителей соединены с соответствующими выходами элемента управления, выходы перемножителей соединены со входами элемента суммирования, выход которого является выходом элемента интерполяции.
Сопоставительный анализ способа многолучевого квазикогерентного приема с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа, так как при одинаковом отношении сигнал/шум позволяет уменьшить вероятность ошибки при приеме сигнала и тем самым позволяет увеличить емкость системы связи.
Сопоставительный анализ заявляемого способа с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемый способ многолучевого квазикогерентного приема отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Сопоставительный анализ устройства многолучевого квазикогерентного приема с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа, так как при одинаковом отношении сигнал/шум позволяет уменьшить вероятность ошибки при приеме сигнала и тем самым позволяет увеличить емкость системы связи.
Сопоставительный анализ заявляемого устройства с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемое устройство многолучевого квазикогерентного приема отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Сопоставительный анализ третьего заявляемого технического решения, блока обработки однолучевого квазикогерентного приемника, с прототипом показывает, что заявляемое изобретение отличается наличием новых существенных признаков, заявленных в отличительной части формулы изобретения. В результате этих введенных в формулу изобретения существенных отличительных признаков улучшаются параметры устройства приема.
Графические материалы, представленные в материалах заявки:
Фиг.1 - пример слотовой структуры данных.
Фиг. 2 - структурная схема устройства многолучевого квазикогерентного приема прототипа.
Фиг. 3 - структурная схема блока обработки однолучевого приемника прототипа.
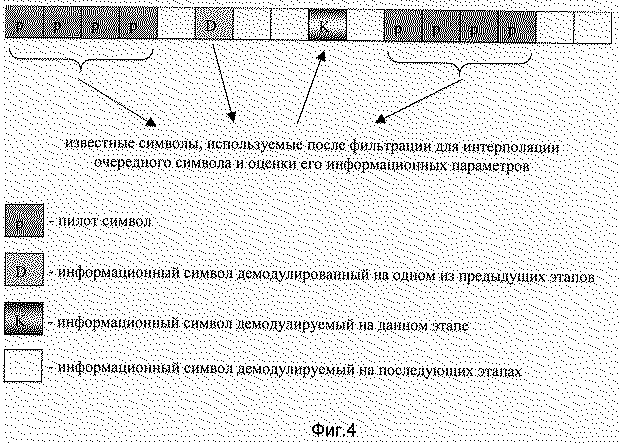
Фиг. 4 - пояснение интерполяции комплексной огибающей при демодуляции информационного символа.
Фиг. 5 - структурная схема предлагаемого устройства многолучевого квазикогерентного приема.
Фиг.6 - структурная схема блока обработки однолучевого приемника предлагаемого устройства.
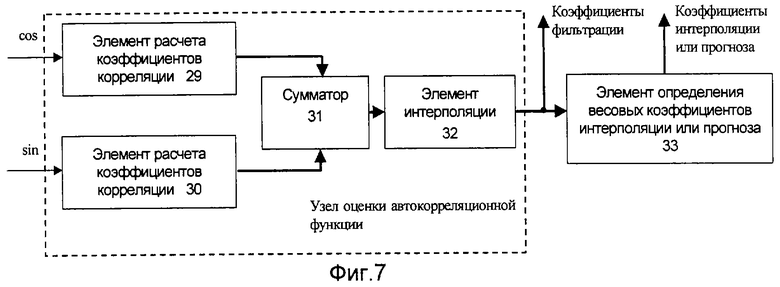
Фиг.7 - пример узла адаптивной оценки весовых коэффициентов фильтрации и интерполяции или прогноза.
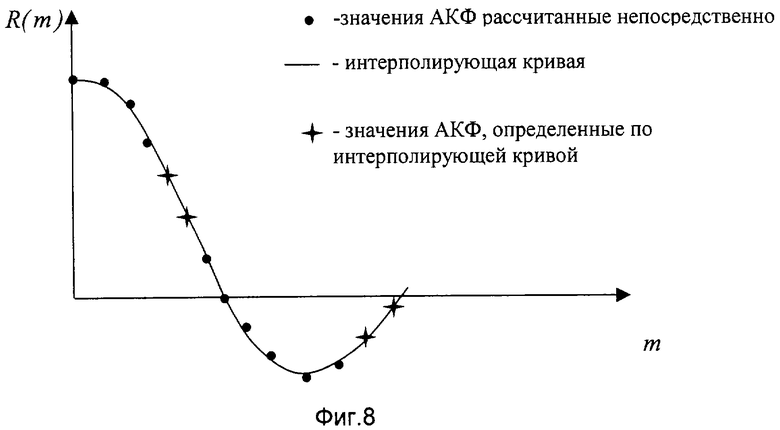
Фиг. 8 - пояснение работы элемента интерполяции при оценке автокорреляционной функции.
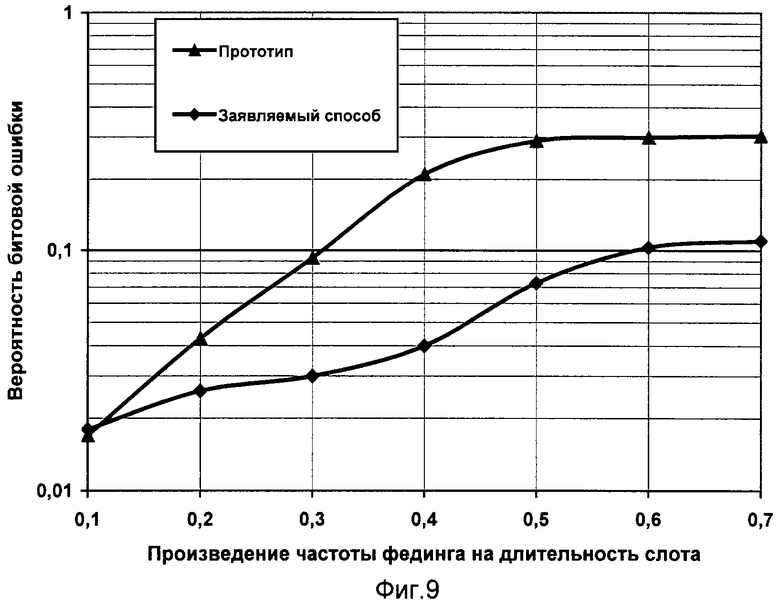
Фиг. 9 - зависимость вероятности битовой ошибки от произведения частоты фединга на длительность слота при отношении сигнал/шум на бит 8 дБ.
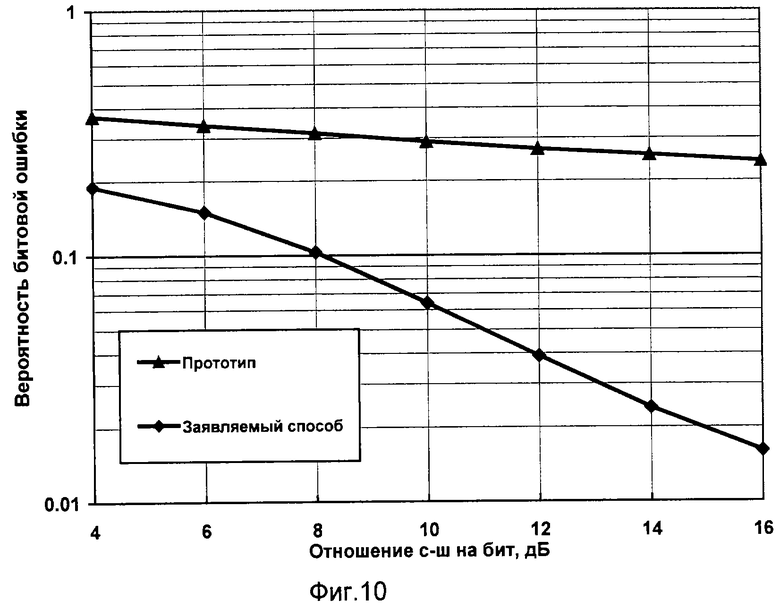
Фиг. 10 - зависимость вероятности битовой ошибки от отношения сигнал/шум на бит.
Данное изобретение представляет собой способ квазикогерентного приема многолучевого сигнала с прерывистым пилот-сигналом, устройство для его реализации и блок обработки для этого устройства.
Предлагаемый способ заключается в следующем.
При приеме сигнала каждого луча производят следующие операции:
- формируют последовательность корреляционных откликов символов, определяя корреляцию входных отсчетов с известной ПСП на интервалах длительности каждого символа,
- отбирают корреляционные отклики пилот-символов из общего потока корреляционных откликов символов,
- определяют оценку автокорреляционной функции синфазной и квадратурной составляющих комплексной огибающей символов,
- определяют весовые коэффициенты фильтрации и интерполяции или прогноза, используя оценку автокорреляционной функции синфазной и квадратурной составляющих комплексной огибающей символов,
- фильтруют корреляционные отклики, соответствующие пилот-символам.
Для каждой группы информационных символов получают в L этапов мягкие решения об информационных символах, причем на каждом этапе:
- выделяют подгруппу информационных символов, состоящую из одного или нескольких информационных символов, не входящих в подгруппы информационных символов предыдущих этапов,
- принимают жесткие решения об информационных символах подгруппы предыдущего этапа.
Для сигнала каждого луча:
- формируют оценки комплексной огибающей информационных символов предыдущего этапа, умножая корреляционные отклики каждого информационного символа предыдущего этапа на комплексно-сопряженные жесткие решения об этих информационных символах,
- оценивают значения комплексной огибающей информационных символов текущего этапа, используя профильтрованные корреляционные отклики пилот-символов, оценки комплексной огибающей информационных символов предыдущих этапов и рассчитанные ранее весовые коэффициенты,
- получают мягкие решения об информационных символах текущего этапа, используя оценки комплексной огибающей этих символов.
Объединяют мягкие решения об информационных символах всех лучей, результат объединения принимают за окончательные мягкие решения об информационных символах текущего этапа,
подгруппа последнего этапа состоит из информационных символов, не вошедших в предыдущие подгруппы.
Оценку комплексной огибающей информационных символов производят методом стохастической интерполяции или прогноза, формируя взвешенную сумму профильтрованных корреляционных откликов пилот-символов и оценок комплексной огибающей демодулированных ранее информационных символов с весовыми коэффициентами, адаптивными к статистике канала.
Каждая группа информационных символов может представлять собой информационные символы, расположенные между смежными пилот-символами.
Мягкие решения об информационных символах получают путем умножения корреляционных откликов каждого информационного символа на нормированные комплексно-сопряженные оценки комплексных огибающих этих символов.
Формирование оценки автокорреляционной функции синфазной и квадратурной составляющих комплексной огибающей символов производят по корреляционным откликам пилот-символов для доступных значений аргумента непосредственно, а для остальных значений аргумента - посредством интерполяции, например, по методу наименьших квадратов.
Порядок разбиения группы информационных символов на последовательно демодулируемые подгруппы информационных символов может быть произвольным. Например, такое разбиение может осуществляться в соответствии с убыванием энергии символов, т. е. символы каждой последующей подгруппы имеют энергию меньшую, чем символы предыдущей подгруппы.
Фиг.4 иллюстрирует, что для демодуляции текущего информационного символа его комплексная огибающая интерполируется по профильтрованным корреляционным откликам пилот-сигнала и по оценкам комплексной огибающей ранее демодулированных информационных символов.
Для реализации такого способа используется устройство, представленное на фиг.5, где обозначено:
1 - однолучевые квазикогерентные приемники,
2 - комплексный перемножитель,
3, 4 - первый и второй сумматоры со сбросом,
5 - блок задержки,
6 - блок обработки сигнала,
7 - генератор ПСП,
8, 9 - первый и второй сумматоры,
10 - блок управления,
17, 18 - первый и второй решающие блоки.
Устройство квазикогерентного приема многолучевого сигнала содержит N однолучевых квазикогерентных приемников 1-1 - 1-N, N -число лучей. Каждый из N однолучевых квазикогерентных приемников 1-1 - 1-N содержит комплексный перемножитель 2, первый и второй входы которого являются входами квазикогерентного приемника, а третий и четвертый входы комплексного перемножителя 2 соединены с выходами генератора псевдослучайных последовательностей 7. Вход генератора ПСП 7 каждого квазикогерентного приемника соединен с первым выходом блока управления 10. Первый и второй выходы комплексного перемножителя 2 соединены соответственно с первым и вторым сумматорами со сбросом 3 и 4, входы сигнала сброса которых в каждом однолучевом квазикогерентном приемнике 1-1 - 1-N соединены с вторым выходом блока управления 10, а выходы первого и второго сумматоров со сбросом 3 и 4 соединены с первым и вторым входами блока задержки 5, третий вход которого является входом управления временем задержки и соединен с третьим выходом блока управления 10. Первый и второй выходы блока задержки 5 соединены с первым и вторым входами блока обработки 6. Первый и второй выходы блоков обработки 6 всех N однолучевых квазикогерентных приемников 1-1 - 1-N соединены со входами первого и второго сумматоров 8, 9, имеющих по N входов. Выходы первого и второго сумматоров 8 и 9 соединены соответственно с первым и вторым решающими блоками 17 и 18. Четвертый выход блока управления 10 соединен с третьим входом блоков обработки 6 всех N однолучевых квазикогерентных приемников 1-1 - 1-N. Выход первого решающего блока 17 соединен с четвертым входом блока обработки 6 каждого из N однолучевых квазикогерентных приемников 1-1 - 1-N. Выход второго решающего блока 18 соединен с пятым входом блока обработки 6 каждого из N однолучевых квазикогерентных приемников 1-1 - 1-N. Выходы первого и второго сумматоров 8 и 9 являются выходами устройства.
Предлагаемое устройство работает следующим образом.
Синфазная и квадратурная составляющие входного сигнала поступают в однолучевые приемники 1-1 - 1-N, а именно на первый и второй входы комплексных перемножителей 2. На третий и четвертый входы перемножителей 2 с выходов генератора ПСП 7 поступают известные ПСП, соответствующие синфазной и квадратурной составляющим сигнала. Состояниями генератора ПСП 7 управляет блок управления 10 в соответствии со значениями временных положений сигналов лучей в принимаемом многолучевом сигнале. Синфазная и квадратурная составляющие сигнала с выходов комплексного перемножителя 2 поступают соответственно на входы сумматоров со сбросом 3 и 4, на вторые входы которых поступает управляющий сигнал сброса из блока управления 10. Сумматоры со сбросом 3, 4 осуществляют операцию посимвольного накопления синфазных и квадратурных составляющих входного сигнала. С выходов первого и второго сумматоров 3 и 4 сигналы, представляющие собой корреляционные отклики символов, поступают через блок задержки 5 на первый и второй входы блока обработки 6, на третий и четвертый входы которого поступают жесткие решения об информационных символах с выходов решающих блоков 17 и 18. Время задержки сигнала в блоке 5 задает блок управления 10 в соответствии со значениями временных положений сигналов лучей в принимаемом многолучевом сигнале таким образом, чтобы корреляционные отклики соответствующих символов всех лучей приходили на блок обработки 6 одновременно. Выходные сигналы блока 6 являются одновременно выходными сигналами соответствующего однолучевого приемника 1 и представляют собой мягкие решения об информационных символах луча. С первого и второго выходов блока обработки 6 каждого однолучевого квазикогерентного приемника 1-I,  мягкие решения об информационных символах лучей поступают на I-е входы первого и второго сумматоров 8, 9. В сумматорах 8 и 9 мягкие решения всех однолучевых приемников объединяются, а именно суммируются. Результаты объединения мягких решений лучей с выходов сумматоров 8, 9 поступают соответственно на решающие блоки 17, 18, где принимаются жесткие решения об информационных символах посредством сравнения объединенных мягких решений с порогами, определяемыми видом модуляции. Жесткие решения об информационных символах поступают на входы блока обработки 6 каждого однолучевого квазикогерентного приемника 1-I,
мягкие решения об информационных символах лучей поступают на I-е входы первого и второго сумматоров 8, 9. В сумматорах 8 и 9 мягкие решения всех однолучевых приемников объединяются, а именно суммируются. Результаты объединения мягких решений лучей с выходов сумматоров 8, 9 поступают соответственно на решающие блоки 17, 18, где принимаются жесткие решения об информационных символах посредством сравнения объединенных мягких решений с порогами, определяемыми видом модуляции. Жесткие решения об информационных символах поступают на входы блока обработки 6 каждого однолучевого квазикогерентного приемника 1-I,  где используются для получения мягких решений о других информационных символах.
где используются для получения мягких решений о других информационных символах.
Выходные сигналы многолучевого квазикогерентного устройства поступают с выходов сумматоров 8, 9 и представляют собой объединенные мягкие решения информационных символов. Блок управления 10 обеспечивает синхронность работы блоков приемника и может быть реализован на современных микропроцессорах цифровой обработки сигналов (DSP), например, TMS 320Cxx, Motorola 56xxx, Intel и т.п.
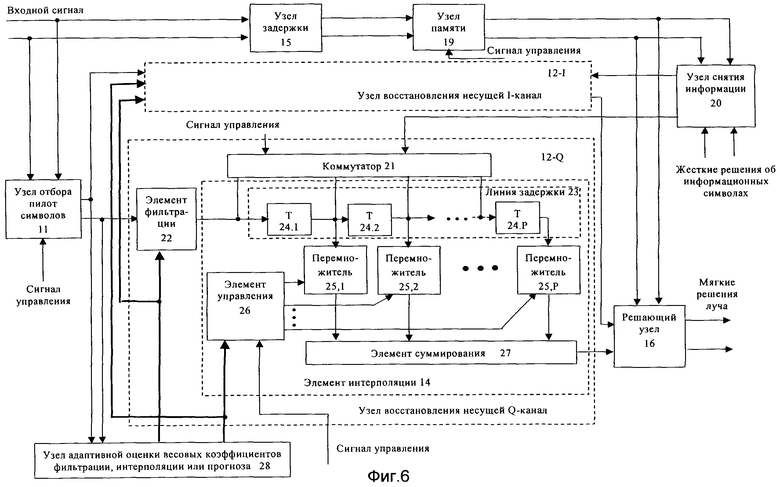
Блок обработки 6 однолучевых квазикогерентных приемников 1 может быть полностью реализован на цифровом процессоре, структурная схема которого представлена на фиг.6, где обозначено:
11 - узел отбора пилот-символов,
12 - I- и Q-узлы восстановления несущей,
14 - элемент интерполяции,
15 - узел задержки,
16 - решающий узел,
19 - узел памяти,
20 - узел снятия информации,
21 - коммутатор,
22 - элемент фильтрации,
23 - линия задержки,
24.1 - 24.Р- элементы задержки,
25.1 - 25.Р- перемножители,
26 - элемент управления,
27 - элемент суммирования,
28 - узел адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза.
Первый и второй входы узла отбора пилот-символов 11 объединены с первым и вторым входами узла задержки 15 и являются входами блока обработки 6. Третий вход узла отбора пилот-символов 11 является управляющим и соединен с выходом блока управления 10. Первый и второй выходы узла отбора пилот-символов 11 соединены с узлами 12-I, 12-Q восстановления несущей и с первым и вторым входами узла адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза 28. Каждый из узлов 12-I, 12-Q восстановления несущей содержит последовательно соединенные элемент фильтрации пилот-символов 22, вход которого соединен с выходом узла отбора пилот-символов 11, и элемент интерполяции 14, второй вход которого является управляющим и соединен с выходом блока управления 10. Р входов элемента интерполяции 14 соединены с соответствующими выходами коммутатора 21. Выход элементов интерполяции 14 узлов 12-I, 12-Q восстановления несущей соединены соответственно с первым и вторым входами решающего узла 16. Третий и четвертый входы решающего узла 16 через узел памяти 19 соединены с первым и вторым выходами узла задержки 15. Выходы решающего узла 16 являются выходами блока обработки 6. Первый и второй выходы узла памяти 19 соединены также с третьим и четвертым входами элемента снятия информации 20. Первый и второй входы элемента снятия информации 20 являются четвертым и пятым входами блока обработки 6. Первый и второй выходы узла снятия информации 20 соединены с входами коммутаторов 21 узлов 12-I, 12-Q восстановления несущей, второй вход которых является управляющим и соединен с выходом блока управления 10. Третий вход узла памяти 19 также является управляющим. Первый выход узла адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза 28 соединен со вторым входом элемента фильтрации пилот-символов 22 узлов 12-I, 12-Q восстановления несущей. Второй выход узла адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза 28 соединен со вторым входом элемента интерполяции 14 узлов 12-I, 12-Q восстановления несущей.
Элемент интерполяции 14 содержит линию задержки 23, состоящую из Р последовательно соединенных элементов задержки 24, Р перемножителей 25, элемент управления 26 и элемент суммирования 27, причем вход первого элемента задержки 24.1 линии задержки 23 соединен с выходом элемента фильтрации 22 и первым выходом коммутатора 21, второй выход коммутатора 21 соединен со входом второго элемента задержки 24.2 и первым входом первого перемножителя 25.1, Р-й выход коммутатора 21 соединен со входом Р-го элемента задержки 24 и первым входом Р-1-го перемножителя 25, выход Р-го элемента задержки 24 линии задержки 23 соединен с первым входом Р-го перемножителя 25, вторые входы перемножителей 25 соединены с выходами элемента управления 26, выходы перемножителей 25 соединены со входами элемента суммирования 27, выход которого является выходом элемента интерполяции 14.
На вход блока обработки 6 поступает последовательность комплексных корреляционных откликов, соответствующих пилот-символам и информационным символам. В соответствии с управляющим (синхронизирующим) сигналом узел отбора пилот-символов 11 из входной последовательности корреляционных откликов пилот-символов и информационных символов пропускает только отклики пилот-символов. С выходов узла отбора пилот-символов 11 синфазные и квадратурные составляющие этих откликов поступают на первый и второй входы узла адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза 28, а также на входы элементов фильтрации пилот-символов 22 узлов 12-I, 12-Q восстановления несущей. Узлы восстановления несущей 12-I, 12-Q обрабатывают соответственно синфазные и квадратурные составляющие входного комплексного сигнала. В элементе фильтрации пилот-символов 22 корреляционные отклики пилот-символов подвергаются весовому суммированию. Весовые коэффициенты элемента фильтрации 22 зависят от статистики канала и определяются в узле адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза 28. Узел адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза 28 осуществляет оценку автокорреляционной функции синфазной и квадратурной составляющих комплексной огибающей символов и вычисляет весовые коэффициенты, необходимые для работы элементов фильтрации 22 и интерполяции 14. С элемента фильтрации 22 профильтрованные отклики пилот-символов поступают в элемент интерполяции 14, а именно на линию задержки 23. Линия задержки 23 представляет собой последовательно соединенные элементы задержки 24.1-24. Р, время задержки сигнала в которых равно периоду следования символов. На другие Р входов линии задержки 23 поступают оценки комплексной огибающей демодулированных ранее информационных символов.
В элементе интерполяции 14 осуществляется интерполяция или прогноз комплексной огибающей информационных символов. Выходной сигнал узла интерполяции 14 представляет собой результат весового суммирования в элементе 27 задержанных в линии задержки 23 профильтрованных корреляционных откликов пилот-символов и оценок комплексной огибающей демодулированных ранее информационных символов (могут быть использованы лишь некоторые из оценок комплексной огибающей демодулированных ранее информационных символов). Значения весовых коэффициентов в перемножителях 25.1-25.Р задает элемент управления 26, который для каждого информационного символа получает требуемый весовой набор с узла адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза 28 и выдает его на перемножители 25. Элемент управления 26 также может быть реализован, например, на микропроцессорах TMS 320Cxx, Motorola 56xxx, Intel и т.п.
Весовые коэффициенты интерполяции или прогноза зависят от статистики канала, временного положения оцениваемого информационного символа, временных положений используемых пилот-символов и демодулированных ранее информационных символов, и определяются в узле адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза 28.
Восстановленные значения синфазной и квадратурной составляющих комплексной огибающей информационных символов с выходов элементов интерполяции 14 узлов 12-I, 12-Q восстановления несущей поступают на первый и второй входы решающего узла 16, на третий и четвертый входы которого поступают синфазные и квадратурные составляющие комплексных корреляционных откликов информационных символов с узла памяти 19. Узел памяти 19 хранит синфазные и квадратурные составляющие комплексных корреляционных откликов информационных символов, поступающих на его вход через узел задержки 15. Узел памяти 19 работает (запоминает, хранит, выдает информацию) в соответствии с управляющим сигналом, поступающим из блока управления 10. Задержка комплексных корреляционных откликов символов в узле 15 необходима для компенсации временной задержки при восстановлении комплексной огибающей сигнала в узлах восстановления несущей 12-I, 12-Q. В решающем узле 16 формируются мягкие решения об информационных символах путем перемножения комплексных корреляционных откликов информационных символов на нормированные комплексно-сопряженные значения восстановленной комплексной огибающей этих символов. Эти мягкие решения после объединения по всем лучам используются для последующего получения жестких решений об информационных символах. Жесткие решения об информационных символах, полученные в решающих блоках 17, 18 (фиг.5), поступают на вход узла снятия информации 20. На третий и четвертый входы узла 20 поступают синфазные и квадратурные составляющие комплексных корреляционных откликов информационных символов, хранящихся в узле памяти 19. Снятие информации в узле 20 производится путем умножения корреляционных откликов символов на нормированные комплексно-сопряженные жесткие решения об информационных символах. Полученные после снятия информации оценки синфазной и квадратурной составляющих комплексной огибающей информационных символов с первого и второго выходов элемента снятия информации 20 поступают через коммутатор 21 на входы линии задержки 23. Коммутатор 21 в соответствии с управляющим сигналом с блока управления 10 соединяет свой вход с одним из своих выходов в зависимости от временного положения информационного символа, оценка комплексной огибающей которого поступает на его вход.
Узел адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза 21 может быть выполнен на цифровом процессоре. Пример структуры узла адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза 21 представлен на фиг.7, где обозначено:
29 - первый элемент расчета коэффициентов корреляции,
30 - второй элемент расчета коэффициентов корреляции,
31 - сумматор,
32 - элемент интерполяции,
33 - элемент определения весовых коэффициентов интерполяции или прогноза.
Оценка неизвестной автокорреляционной функции канала производится в узле адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза 28 по корреляционным откликам пилот-символов.
В элементах расчета коэффициентов корреляции 29 и 30 в соответствии с формулами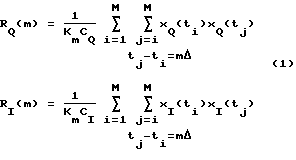
производится вычисление коэффициентов автокорреляции соответственно I- и Q-каналов,
где xI(ti), xQ(ti),  - синфазная и квадратурная составляющие I- и Q-каналов корреляционных откликов пилот-символов соответственно,
- синфазная и квадратурная составляющие I- и Q-каналов корреляционных откликов пилот-символов соответственно,
m= 0; 1; 2; ... - неотрицательное целое число, соответствующее доступным значениям аргумента автокорреляционной функции,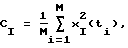
 - нормировочные коэффициенты,
- нормировочные коэффициенты,
Δ - длительность символа,
Кm - количество слагаемых, зависящее от интервала анализа автокорреляционной функции МΔ и от слотовой структуры сигнала.
Под доступными значениями аргумента автокорреляционной функции будем понимать такие значения, которые соответствуют временному расстоянию между пилот-символами сигнала.
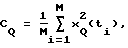
В сумматоре 31 происходит усреднение коэффициентов автокорреляции, рассчитанных для I- и Q-каналов в соответствии с формулой
В силу прерывистости пилот-сигнала оценку нормированной автокорреляционной функции R(m) можно получить не для любых целых m. Процедура оценки автокорреляционной функции для произвольного значения аргумента иллюстрируется на фиг.8. Оценка коэффициентов автокорреляции в точках, где она не была определена непосредственно (по формулам (1), (2)), производится в элементе интерполяции 32, например, по методу наименьших квадратов. Оценки коэффициентов автокорреляции элемента интерполяции 32 представляют собой выходные значения узла адаптивной оценки весовых коэффициентов фильтрации, интерполяции или прогноза 28 и используются в качестве весовых коэффициентов фильтрации элементов фильтрации 22, куда и поступают.
Нахождение весовых коэффициентов интерполяции или прогноза комплексных огибающих символов в узле адаптивной оценки весовых коэффициентов интерполяции или прогноза 28 осуществляется в соответствии с интерполированием или прогнозом по методу наименьших квадратов в предположении линейного характера статистической зависимости квадратур комплексной огибающей символов. Приведем основные соотношения для этого метода.
Пусть требуется найти оценку ym значения случайного процесса в момент tm по известным значениям этого процесса yi,  в другие моменты времени ti,
в другие моменты времени ti, 
Будем искать оценку значения случайного процесса ym в виде линейной суммы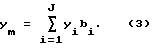
В качестве критерия оптимальности примем критерий минимума среднего квадрата ошибки. В этом случае математическое ожидание квадрата ошибки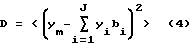
должно быть минимально, <•> - обозначает операцию усреднения. Для нахождения минимума выражения (4) необходимо приравнять нулю частные производные dD/dbi= 0,  Получаем систему J линейных уравнений с J неизвестными
Получаем систему J линейных уравнений с J неизвестными
Введем вектора 
 y={yi},
y={yi},  и матрицу К={<yjyi>},
и матрицу К={<yjyi>}, 
Тогда вектор весовых коэффициентов b определяется выражением
b = K-1R, (6)
а искомая оценка в векторно-матричных обозначениях равна
ym = tTK-1R. (7)
Блок определения весовых коэффициентов b интерполяции или прогноза может быть выполнен на основе цифрового процессора.
Оценки нормированной автокорреляционной функции R(k-j)=<ykyj>, поступающие на вход элемента определения весовых коэффициентов интерполяции или прогноза 33, полностью определяют значения К, R, необходимые для расчета весовых коэффициентов b в соответствии с формулой (6). Порядок расчета весовых коэффициентов интерполяции и весовых коэффициентов прогноза идентичны.
На фиг. 9 приведены полученные с помощью компьютерного моделирования кривые зависимости вероятности битовой ошибки от произведения частоты фединга на длительность слота для заявляемого способа и способа-прототипа при отношении сигнал-шум на бит, равном 8 дБ.
На фиг. 10 приведены полученные с помощью компьютерного моделирования кривые зависимости вероятности битовой ошибки от отношения сигнал-шум на бит для заявляемого способа и способа-прототипа.
Моделирование было выполнено для двухлучевого канала. Предполагалось, что сигналы каждого луча разрешаемы, федингуют независимо и имеют одинаковую среднюю мощность. Принимаемый сигнал представлял собой последовательность слотов длительностью 0.625ms, каждый из которых содержал 9 информационных QPSK-символов и 1 пилот-символ. Для кривых фиг.10 произведение частоты фединга на длительность слота выбиралось равным 0.5, которое при частоте несущей 2ГГц и длительности слота 0.625ms соответствуют скорости движения абонента 500 км/ч. Указанная скорость движения абонента приведена в требованиях на проектирование аппаратуры 3-го поколения сотовых систем связи и соответствует наиболее жестким условиям приема.
Как видно из фиг.9, применение заявляемого способа позволяет получить существенно более качественные по сравнению с прототипом характеристики приема. Этот выигрыш возрастает с увеличением частоты фединга. При больших частотах фединга способ прототипа практически теряет работоспособность, в то время как заявляемый способ обеспечивает хорошие характеристики (фиг.10).
Таким образом, применение заявляемого способа в случае высоких скоростей движения абонента позволяет обеспечить помехоустойчивость и емкость системы связи, которая недостижима при использовании известных алгоритмов.
Изобретение относится к радиотехнике и может быть использовано в радиоприемных устройствах базовой и мобильной станций. Изобретение основано на предположении о линейном характере статистической зависимости комплексной огибающей полезного сигнала. Использовано интерполирование или прогноз комплексной огибающей сигнала по методу наименьших квадратов. Использование информационных символов для восстановления несущей значительно повышает качество приема многолучевого сигнала при незначительном увеличении сложности обработки. Технический результат: повышение помехоустойчивости приема сигналов с прерывистым пилот-сигналом при различных скоростях передачи информации и различных статистиках канала при увеличении емкости системы связи. 3 с. и 5 з.п.ф-лы, 10 ил.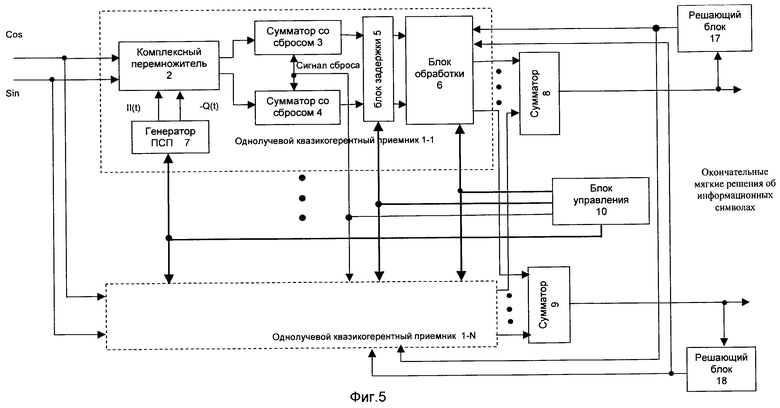
| АВЕТА S | |||
| et al | |||
| Perfomance comparison between time-multiplexed pilot channel and parallel pilot channel for coherent rake combining in DS-CDMA mobile radio, IEICE Trans | |||
| Commun.,1998, Yuly, v.E81-B, no.7, pp.1417-1425 | |||
| OHNO К | |||
| et al | |||
| Wideband coherent DS-CDMA, IEEE, VTC'95, 1995, pp.779-783 | |||
| US 5132985 A, 21.07.1992 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| УСТРОЙСТВО И СПОСОБ ДЕКОДИРОВАНИЯ КОГЕРЕНТНОГО СИГНАЛА, МОДУЛИРОВАННОГО ПУТЕМ МНОГОУРОВНЕВОЙ ФАЗОВОЙ МАНИПУЛЯЦИИ С ДИФФЕРЕНЦИАЛЬНЫМ КОДИРОВАНИЕМ СИМВОЛОВ | 1995 |
|
RU2121232C1 |

