Изобретение относится к измерительной технике и предназначено для высокоточных измерений угловых перемещений в автоматизированных технических системах различного назначения.
Известен ультразвуковой преобразователь угловых перемещений по Авторскому свидетельству SU №1557688, опубл. БИ №14, 1990, содержащий первичный магнитострикционный преобразователь перемещений, состоящий из кольцевого магнитострикционного звукопровода, входного и выходного электроакустических преобразователей, акустического поглотителя, токосъемника, усилителя записи и усилителя считывания, формирователь и генератор импульсов, два логических элемента И, триггер, логический элемент ИЛИ, измерительный генератор, счетчик импульсов и запоминающее устройство.
Известен другой ультразвуковой преобразователь угловых перемещений, описанный в источнике: Схемотехника цифровых преобразователей перемещений: Справочное пособие / В.Г.Домрачеев, В.Р.Матвеевский, Ю.С.Смирнов. - М.: Энергоатомиздат, 1987 - С.71, рис.4.5. Устройство содержит первичный магнитострикционный преобразователь перемещений, состоящий из кольцеобразного магнитострикционного звукопровода с акустическим поглотителем, входным неподвижным и выходным подвижным электроакустическими преобразователями в виде магнитных головок, усилителей считывания и записи, формирователь и генератор импульсов, триггер, измерительный генератор, логический элемент И и счетчик импульсов.
В качестве прототипа выбран ультразвуковой преобразователь угловых перемещений по Заявке на изобретение RU №94024864 А1. Опубл. 10.05.1996. Устройство состоит из двух соосно закрепленных кольцевых звукопроводов из однотипного магнитострикционного материала с разными радиусами закругления, заключенных в акустический поглотитель, сигнальных электроакустических преобразователей, поводкового элемента, ограничителей перемещений, установленных с обеих сторон акустического поглотителя, а также формирователь импульсов, соединенный с усилителем записи, блок кодирования и вычислений, подключенный через усилитель считывания к выводам сигнальных электроакустических преобразователей, выходы которого подключены к выходным шинам результата, знака перемещения, синхронизации и контроля, а управляющий вход соединен с другим выходом формирователя импульсов, его сигнальный вход подключен к шине управления.
Известные устройства [1-3] обладают недостаточными точностью и разрешающей способностью. В устройствах не использованы эффективные методы уменьшения температурной погрешности измерений, значения которой особенно велико на уровне первичного акустического преобразователя. Применение падающих продольных ультразвуковых волн-носителей ограничивает разрешающую способность данных устройств вследствие соизмеримости базы акустического тракта с геометрической длиной волновода. Одновременно снижается надежность измерительного преобразования, технологичность конструкции из-за использования подвижных сигнальных электроакустических преобразователей в виде магнитных головок с сигнальными линиями связи. В целом, это ведет к ограничению области применения устройств и увеличению их себестоимости.
Технический результат изобретения заключается в повышении точности и разрешающей способности за счет уменьшения влияния тепловых полей и увеличения вдвое базы акустического тракта без изменения его физического размера и частоты дискретизации временного интервала перемещения.
Поставленная цель достигается тем, что в ультразвуковом преобразователе угловых перемещений, содержащем первичный магнитострикционный преобразователь перемещений, состоящий из двух соосно закрепленных кольцевых звукопроводов из однотипного магнитострикционного материала с разными радиусами закругления, заключенных в акустический поглотитель, сигнальных электроакустических преобразователей, поводкового элемента, ограничителей перемещений, установленных с обеих сторон акустического поглотителя, а также формирователь импульсов, соединенный с усилителем записи, блок кодирования и вычислений, подключенный через усилитель считывания к выводам сигнальных электроакустических преобразователей, выходы которого подключены к выходным шинам результата, знака перемещения, синхронизации и контроля, а управляющий вход соединен с другим выходом формирователя импульсов, его сигнальный вход подключен к шине управления, на каждом звукопроводе между ограничителями перемещений установлен постоянный магнит, имеющий кинематическое соединение с контролируемым объектом через поводковый элемент, с одной стороны от поглотителя на звукопроводах жестко закреплены сигнальные электроакустические преобразователи, а с другой стороны - отражающая нагрузка, а выход усилителя записи подключен к кольцевым звукопроводам.
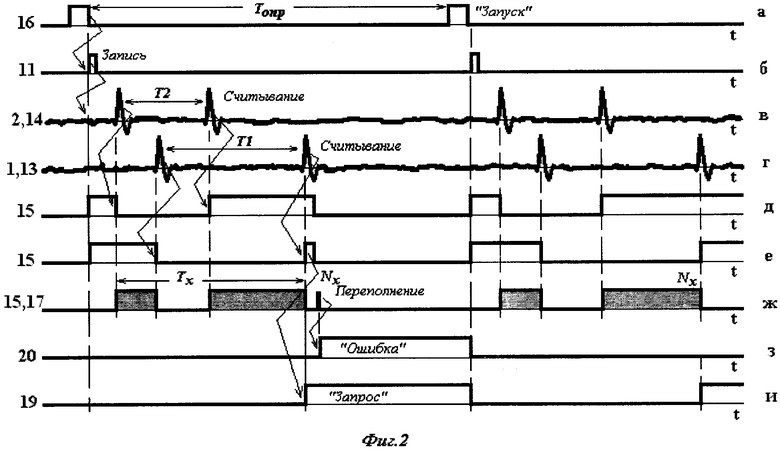
Устройство поясняется чертежами. На фиг.1 и фиг.2 приведены блок-схема ультразвукового преобразователя угловых перемещений и основные временные диаграммы работы.
Ультразвуковой преобразователь угловых перемещений (фиг.1) содержит первичный магнитострикционный преобразователь перемещений (МПП), содержащий кольцевые звукопроводы 1, 2 из однотипного магнитострикционного материала с разными радиусами R1>R2 закругления, акустический поглотитель 3, отражающую нагрузку 4, по два ограничителя 5 перемещений и постоянных магнита 6, 7 с поводковым элементом 8, два сигнальных электроакустических преобразователя (ЭАП) 9, 10, а также формирователь 11 импульсов, усилитель 12 записи, два усилителя 13, 14 считывания, блок 15 кодирования и вычислений (БКВ), входную шину 16 управления и выходные шины 17-20 результата, знака перемещения, синхронизации и контроля соответственно.
Кольцевые звукопроводы 1, 2 МПП закреплены параллельно друг относительно друга, заключены в акустический поглотитель 3 и гальванически подключены к усилителю 12 записи. С одной стороны от поглотителя 3 на звукопроводах 1, 2 жестко закреплены сигнальные ЭАП 9, 10, подключенные через одноименные усилители 13,14 считывания к сигнальным входам БКВ 15, и один из ограничителей 5 перемещений, а с другой стороны - отражающая нагрузка 4 и второй ограничитель 5 перемещений. Между ограничителями 5 перемещений на звукопроводах 1, 2 закреплены два постоянных магнита 6, 7, кинематически соединенных с общим поводковым элементом 8 и контролируемым объектом. Сигнальный вход формирователя 11 импульсов подключен к шине 16 управления. Один его выход соединен с усилителем 12 записи, а другой - с управляющим входом БКВ 15, подключенным к выходным шинам 17-20 результата, знака перемещения, синхронизации и контроля устройства соответственно.
Устройство работает следующим образом.
Первоначально устройство (фиг.1) находится в исходном состоянии ожидания текущего цикла преобразования углового перемещения объекта в код, которое выполняется с приходом сигнала «Запуск» (фиг.2а) по шине 16 управления. По этому сигналу запускается формирователь 11 импульсов. На его выходах вырабатываются стробирующие сигналы для возбуждения усилителя 12 записи и подготовки БКВ 15 к измерительному преобразованию (фиг.2б).
По сигналам формирователя 11 импульсов усилитель 12 записи вырабатывает соответствующие токовые сигналы, которые проходят в среды кольцевых звукопроводов 1, 2 и возбуждают под постоянными магнитами 6, 7 ультразвуковые волны (эф. Видемана). Они распространяются вдоль акустического тракта МПП (по звукопроводам 1, 2) со скоростью Vкр нулевой волны кручения. Волны правого хода (падающие волны) достигают одноименные сигнальные ЭАП 9, 10 и ими считываются (эф. Виллари), а волны левого хода достигают отражающей нагрузки 4, отражаются и изменяют направление хода (отраженные волны) и также считываются сигнальными ЭАП 9, 10. С выводов сигнальных ЭАП 9, 10 сигналы считывания преобразуются в прямоугольные видеоимпульсы усилителями 13, 14 считывания и поступают на сигнальные входы БКВ 15 (фиг2в-ж). Распространяясь далее по акустическому тракту ультразвуковые волны проходят в акустический поглотитель 3 и рассеивают энергию, обеспечивая необходимый уровень шума в измерительном тракте МПП устройства.
В БКВ 15 по сигналам усилителей 13, 14 считывания производится формирование временных интервалов T1 и Т2 искомого углового перемещения α объекта, равных соответственно

и вычисление результирующего временного интервала Tx вследствие разности радиусов закругления ΔR=R1-R2>0 звукопроводов 1, 2 (1):

с последующим его кодированием в двоичном формате Nx=Tx·f0, здесь f0 - частота дискретизации.
В момент считывания сигнальным ЭАП 9 отраженной ультразвуковой волны завершается текущий цикл преобразования «угол-код» устройства. На n-разрядных выходах БКВ 15 будет сформирован цифровой код Nx, несущий информацию о текущем угловом положении объекта и не содержащий температурную составляющую погрешности (2):

Результирующий код Nx проходит на выходные шины 17 результата, формируя сигнал «Угол». На другом выходе БКВ 15 вырабатывается сигнал «Запрос» (фиг.2и) и выставляется по шине 19 синхронизации, информируя пользователя о готовности устройства к очередному циклу преобразования, который выполняется согласно описанного через временной интервал Tопр≥Тц, где Тц - длительность цикла преобразования, с приходом очередного сигнала «Запуск».
При нарушениях процесса измерительного преобразования «угол-код», вызывающего переполнение разрядной сетки БКВ 15, на другом его выходе вырабатывается сигнал «Ошибка» (фиг.2ж, з), который выставляется по шине 20 контроля, предупреждая пользователя о недостоверной информации по шинам 17 и 18 в текущем цикле преобразования. В смежных циклах преобразования БКВ 15 производит вычисление сигнала в виде кода Nзн=sgn|Nx.i-Nx.i-1|, где Nx.i... - смежные значения кодов угловых перемещений объекта, который выставляется по m=3 - разрядным шинам 18 знака перемещения.
Таким образом, предлагаемое устройство (фиг.1) по сравнению с выбранным прототипом имеет более высокие точность и разрешающую способность. Это связано с тем, что выполнение акустического тракта МПП в виде параллельных кольцевых звукопроводов 1, 2 из однотипного магнитострикционного материала с разными радиусами ΔR закругления (2), позволяет проводить самокомпенсацию температурной погрешности измерительного преобразования в степени идентичности параметров последних. А применение здесь отражающей нагрузки 4 увеличивает в Б=2 раза базу акустического тракта МПП без изменения его физической длины и частоты f0 дискретизации временных интервалов Тx (2). Применение постоянных магнитов 6, 7 для возбуждение ультразвуковых волн кручения повышает динамические характеристики, надежность и технологичность конструкции МПП устройства, и в целом, расширяет область его технического использования.
Источники информации
1. А.с. SU №1557688. Опубл. БИ №14, 1990.
2. Домрачеев В.Г. Схемотехника цифровых преобразователей перемещений: Справочное пособие / В.Г.Домрачеев, В.Р.Матвеевский, Ю.С.Смирнов. - М.: Энергоатомиздат, 1987 - С.71, рис.4.5.
3. Заявка RU №94024864 А1. Опубл. 10.05.1996. Прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2318186C2 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 2005 |
|
RU2298154C1 |
| МАГНИТОСТРИКЦИОННЫЙ УРОВНЕМЕР | 2006 |
|
RU2319935C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2032179C1 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 2002 |
|
RU2213940C1 |
| МАГНИТОСТРИКЦИОННЫЙ ДВУХКООРДИНАТНЫЙ НАКЛОНОМЕР | 2008 |
|
RU2389975C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 2006 |
|
RU2310174C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |
Использование: в автоматизированных технических системах в качестве элемента обратной связи по угловому положению объекта. Технический результат: повышение точности и разрешающей способности. Сущность: преобразователь содержит кольцевые звукопроводы с разными радиусами, акустический поглотитель, отражающую нагрузку, два ограничителя перемещений, два постоянных магнита с поводковым элементом, два сигнальных электроакустических преобразователя, формирователь импульсов, усилитель записи, два усилителя считывания, блок кодирования и вычислений. На каждом звукопроводе между ограничителями перемещений установлен постоянный магнит, имеющий кинематическое соединение с контролируемым объектом через поводковый элемент. С одной стороны от поглотителя на звукопроводах жестко закреплены сигнальные электроакустические преобразователи, с другой стороны - отражающая нагрузка. Выход усилителя записи подключен к кольцевым звукопроводам. 2 ил.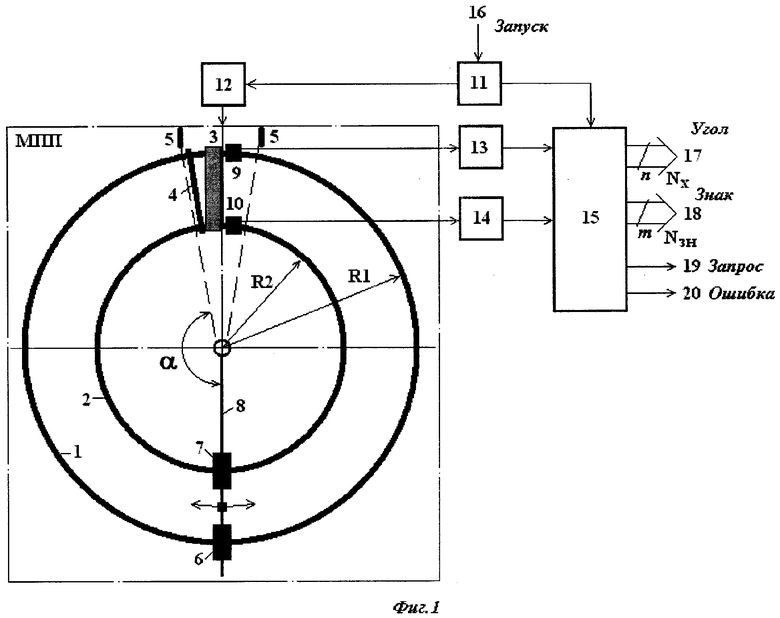
Ультразвуковой преобразователь угловых перемещений, содержащий первичный магнитострикционный преобразователь перемещений, состоящий из двух соосно закрепленных кольцевых звукопроводов из однотипного магнитострикционного материала с разными радиусами закругления, заключенных в акустический поглотитель, сигнальных электроакустических преобразователей, поводкового элемента, ограничителей перемещений, установленных с обеих сторон акустического поглотителя, а также формирователь импульсов, соединенный с усилителем записи, блок кодирования и вычислений, подключенный через усилители считывания к выводам сигнальных электроакустических преобразователей, выходы которого подключены к выходным шинам результата, знака перемещения, синхронизации и контроля, а управляющий вход соединен с другим выходом формирователя импульсов, сигнальный вход которого подключен к шине управления, отличающийся тем, что на каждом звукопроводе между ограничителями перемещений установлен постоянный магнит, имеющий кинематическое соединение с контролируемым объектом через поводковый элемент, с одной стороны от поглотителя на звукопроводах жестко закреплены сигнальные электроакустические преобразователи, с другой стороны - отражающая нагрузка, а выход усилителя записи подключен к кольцевым звукопроводам.
| RU 94024864 A1, 10.05.1996 | |||
| Магнитострикционный преобразователь перемещения в код | 1985 |
|
SU1309312A1 |
| Магнитострикционный преобразователь перемещения в код | 1987 |
|
SU1557688A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2032179C1 |

