Изобретение относится к измерительной и вычислительной технике и может найти применение в робототехнике для измерения и контроля параметров кинематического движения объекта.
Известен ультразвуковой преобразователь линейных перемещений, содержащий звукопровод из магнитострикционного материала, излучатель ультразвуковых колебаний, формирователь импульсов записи, два приемника ультразвуковых колебаний, два усилителя-формирователя импульсов считывания, схему совпадения и два магнита [1] .
Известен другой ультразвуковой преобразователь линейных перемещений, выбранный в качестве прототипа, который содержит два звукопровода из магнитострикционного материала, два акустических демпфера и ограничителя перемещений, стабилизатор растягивающих усилий, подвижный элемент записи, два неподвижных элементов считывания, усилитель записи, два усилителя-формирователя считывания, блок вычитания, формирователь импульсов и блок вычислений результата [2] .
Основными недостатками известных устройств являются недостаточные точность и быстродействие преобразования перемещений в код. Низкая точность преобразования объясняется влиянием дисперсии скорости продольной волны, которая не устраняется в процессе вычисления результата. Недостаточное быстродействие объясняется влиянием времени распространения упругой волны через среду звукопровода, увеличивая и делая переменным в широком диапазоне значений время цикла преобразования. Это не позволяет использовать указанные устройства в системах реального времени (в робототехнике) и выполнять высокоточные измерения параметров кинематического движения объекта.
Целью изобретения является повышение точности и быстродействия преобразования линейных перемещений в код.
Цель достигается тем, что в ультразвуковой преобразователь линейных перемещений, содержащий два параллельных звукопровода из магнитострикционного материала, закрепленных в акустических поглотителях, с внутренней стороны первого из которых на звукопроводах друг против друга неподвижно установлены первый и второй сосредоточенные элементы считывания, выводы которых соединены с первым и вторым входами усилителя-формирователя считывания, выход которого соединен с первым информационным входом вычислительного блока, первый и второй управляющие входы которого подключены соответственно к шине запуска и к шине разрешения, которая соединена со входом формирователя импульсов, выход которого соединен со входом усилителя записи, выход вычислительного блока соединен с шиной запроса, а первая группа выходов соединена с шинами данных, два ограничителя перемещений, закрепленные на границах рабочего участка первого звукопровода, и третий элемент считывания, в него введен поляризатор, формирователь импульсов выполнен в виде генератора качающей частоты, вычислительный блок содержит цифровой измеритель разности частот, триггер управления и формирователь знака перемещения, а третий элемент считывания неподвижно установлен на первом звукопроводе с наружной стороны первого акустического поглотителя, вывод третьего элемента считывания соединен с третьим входом усилителя-формирователя считывания, расположенный с наружной стороны первого акустического поглотителя, конец первого звукопровода подключен к выходу усилителя записи, один сигнальный вход цифрового измерителя разности частот является первым информационным входом вычислительного блока, вторым информационным входом которого является другой сигнальный вход цифрового измерителя разности частот, который подключен к выходу генератора качающей частоты, вход синхронизации формирователя знака перемещения является первым управляющим входом вычислительного блока и соединен с входом установки в единичное состояние триггера управления и с первым управляющим входом цифрового измерителя разности частот, второй управляющий вход которого является вторым управляющим входом вычислительного блока, выход соединен с входом установки в нулевое состояние триггера управления, инверсный выход которого является выходом вычислительного блока, а прямой выход соединен с третьим управляющим входом цифрового измерителя разности частот, группа выходов которого является первой группой выходов вычислительного блока и соединена с информационными входами формирователя знака перемещения, выходы которого являются выходами кода знака вычислительного блока, поляризатор установлен на первом звукопроводе с возможностью перемещения вдоль него между ограничителями перемещений и является кинематическим входом преобразователя.
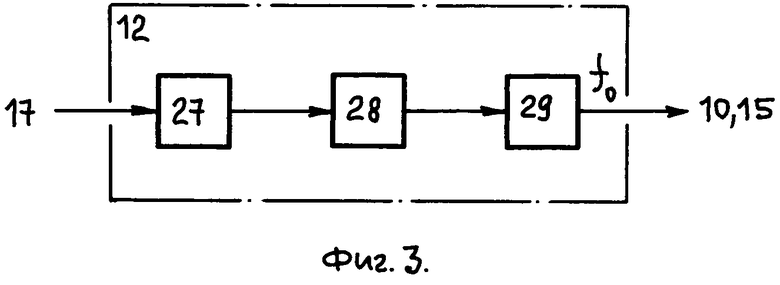
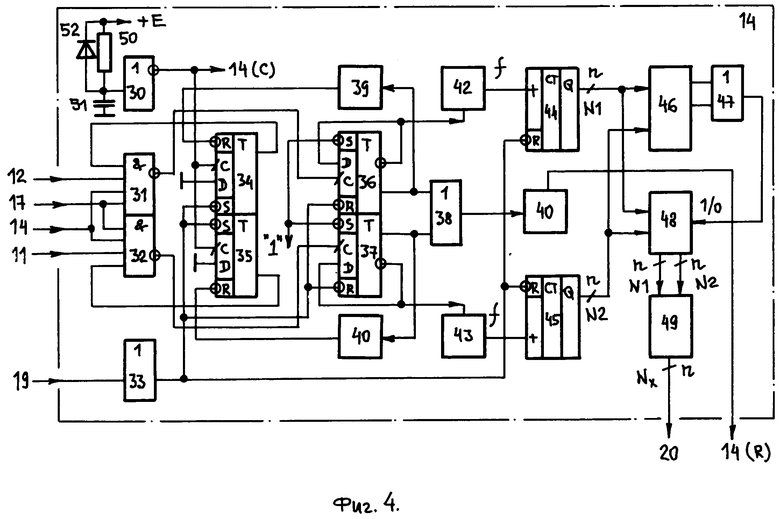
На фиг. 1 приведена структурная схема ультразвукового преобразователя линейных перемещений; на фиг. 2-4 - варианты выполнения усилителя-формирователя считывания, формирователя импульсов и цифрового измерителя разности частот; на фиг. 5, 6 - основные временные диаграммы, поясняющие работу ультразвукового преобразователя линейных перемещений.
Ультразвуковой преобразователь линейных перемещений (фиг. 1) содержит первичный магнитострикционный преобразователь перемещений (МПП), состоящий из основного и дополнительного прямолинейных магнитострикционных звукопроводов 1, 2, двух акустических поглотителей 3, 4, трех сосредоточенных элементов 5, 6, 7 считывания, поляризатора 8, двух ограничителей 9 перемещений, усилителя 10 записи и усилителя-формирователя 11 считывания, формирователь 12 импульсов, выполненный в виде генератора качающей частоты, вычислительный блок (ВБ) 13, состоящий из триггера 14 управления, цифрового измерителя 15 разности частот (ЦИПЧ), формирователя 16 знака перемещения, шину 17 разрешения, шину 18 запроса, шину 19 запуска, n-шины 20 данных и m-шины 21 знака перемещения.
Основной и дополнительный звукопроводы 1, 2 МПП установлены параллельно друг относительно друга и закреплены в акустических поглотителях 3, 4. Один конец основного звукопровода 1 подключен к общей шине преобразователя, а другой - к выходу усилителя 10 записи. С обоих сторон от первого акустического поглотителя 3 на основном звукопроводе неподвижно закреплены первый и второй сосредоточенные элементы 5, 6 считывания, подключенные к первому и второму входам усилителя-формирователя 11 считывания. Третий его вход подсоединен к выводам третьего сосредоточенного элемента 7 считывания, закрепленного неподвижно на дополнительном звукопроводе 2 оппозитно второму сосредоточенному элементу 6 считывания. На рабочей части основного звукопровода 1 МПП закреплен поляризатор 8, выполненный с возможностью перемещения между ограничителями 9 перемещений и кинематически связан с объектом. Выход усилителя-формирователя 11 считывания соединен с одним сигнальным входом ЦИРЧ 15 ВБ 13, его другой сигнальный выход соединен с выходом формирователя 12 импульсов и входом усилителя 10 записи. Управляющие входы формирователя 12 импульсов и ЦИРЧ 15 объединены и подключены к шине 17 разрешения. Второй управляющий вход ЦИРЧ 15 соединен с прямым выходом триггера 14 управления ВБ 13, третий управляющий вход соединен с единичным входом триггера 14 управления, синхровходом формирователя 16 знака перемещения и подключен к шине 19 запуска. Инверсный выход триггера 14 управления подключен к шине 18 запроса. Информационные выходы ЦИРЧ 15 соединены с одноименными входами формирователя 16 знака перемещения и подключены к шинам 20 данных, а его другой выход соединен с нулевым входом триггера 14 управления. Выходы формирователя 16 знака перемещения ВБ 13 подключены к шинам 21 знака перемещения.
Ультразвуковой преобразователь линейных перемещений работает следующим образом. Первоначально преобразователь (фиг. 1) устанавливается в исходное состояние, а именно триггер 14 управления ВБ 13, D-триггеры 34, 35 по сигналу формирователя начального сброса, выполненного на инверторе 30 с RC-элементами 50, 51 и диоде 52 (фиг. 4). При подаче сигнала "Разрешение" (фиг. 6, а) по шине 17 разрешения производится запуск формирователя 12 импульса, вырабатывающий серии импульсных сигналов качающей частоты fo (фиг. 5. б, фиг. 6. б) и разблокирование сигнальных входов ЦИРЧ 15 ВБ 13. Сигналы формирователя 12 импульсов поступают на один из сигнальных входов ЦИРЧ 15 и вход усилителя 10 записи, возбуждая его. На его выходе вырабатываются токовые посылки с частотой следования fo = 1/То, которые проходят в среду основного магнитострикционного звукопровода 1 МПП и возбуждают упругие крутильные волны под поляризатором 8 вследствие магнитомеханического преобразования. Одновременно на выводах первого и второго сосредоточенных элементов 5, 6 считывания наводятся импульсы считывания вследствие индуктивного эффекта, которые проходят на входы усилителя-формирователя 11 считывания и взаимокомпенсируются первым дифференциальным усилителем 22 (фиг. 2). На выходе усилителя-формирователя 11 считывания не вырабатывается импульсная последовательность сигналов опорной частоты fo в моменты возбуждения звукопровода 1 МПП. Для формирования импульсной последовательности качающей частоты fo формирователь 12 импульсов выполнен на основе последовательно включенных генератора 27 линейно-изменяющегося напряжения (ГЛИН), формирующего треугольное напряжение, генератора 28 управляемого напряжения и одновибратора 29 (фиг. 3).
Упругие волны кручения, распространяясь по основному звукопроводу 1 МПП в сторону второго акустического поглотителя 4 со скоростью Vкр, в следующие моменты времени поглощаются. Другие упругие волны распространяются в сторону второго сосредоточенного элемента 6 считывания, достигают его и считываются через интервал времени искомого линейного перемещения lx объекта, равного
Tx=  ; ; (1) На его выводах индуцируются аналоговые сигналы считывания импульсной последовательности вследствие магнитоупругого преобразования, которые проходят через второй и третий дифференциальные усилители 23, 24 (фиг. 2), ограничиваются по амплитуде ограничителем 25 и преобразуются в прямоугольные видеоимпульсы пороговым элементом 26 (триггер Шмитта). На выходе усилителя-формирователя 11 считывания формируется импульсная последовательность видеоимпульсов (фиг. 5, в, фиг. 6, в), следующая с отличной частотой fo* = 1/Tо* на величину временной задержки (1) по акустическому тракту МПП, и поступает на другой сигнальный вход ЦИРЧ 15 ВБ 13 преобразователя. В следующие моменты времени упругие волны достигают первый акустический поглотитель 3 и рассеивают на нем свою энергию. В среде основного звукопровода 1 МПП не происходит накопления энергии отраженных волн и поддерживается заданное отношение сигнал/помеха.
; ; (1) На его выводах индуцируются аналоговые сигналы считывания импульсной последовательности вследствие магнитоупругого преобразования, которые проходят через второй и третий дифференциальные усилители 23, 24 (фиг. 2), ограничиваются по амплитуде ограничителем 25 и преобразуются в прямоугольные видеоимпульсы пороговым элементом 26 (триггер Шмитта). На выходе усилителя-формирователя 11 считывания формируется импульсная последовательность видеоимпульсов (фиг. 5, в, фиг. 6, в), следующая с отличной частотой fo* = 1/Tо* на величину временной задержки (1) по акустическому тракту МПП, и поступает на другой сигнальный вход ЦИРЧ 15 ВБ 13 преобразователя. В следующие моменты времени упругие волны достигают первый акустический поглотитель 3 и рассеивают на нем свою энергию. В среде основного звукопровода 1 МПП не происходит накопления энергии отраженных волн и поддерживается заданное отношение сигнал/помеха.
По инверсному выходу триггера 14 управления выставляется сигнал "Запрос" (фиг. 5, г), который проходит на шину 18 запроса и информирует пользователя о готовности преобразователя к началу цикла преобразования. При выставлении сигнала "Запуск" (фиг. 5, а, фиг. 6, г) по шине 19 запуска в произвольный момент времени производится переключение триггера 14 управления в единичное состояние (фиг. 5, г), обнуление счетчиков 44, 45 (фиг. 5, з, к), установка в единичное состояние D-триггеров 34, 35 (фиг. 5. д. е) и в нулевое состояние - D-триггеров 36, 37 (фиг. 5, ж, и). Входные логические элементы 31, 32 И-НЕ разблокируются, что приводит к захвату пары импульсов опорной и сдвинутой по времени частот fo и fo(фиг. 5, б, в), которые проходят через элементы 31, 32 И-НЕ и переключают D-триггеры 36, 37, работающие в режиме счетного триггера (фиг. 5, ж, к). На время действия этих сигналов запускаются измерительные генераторы 42, 43, производящие дискретизацию с интервалом Т = 1/f. Счетчики 44, 45 производят подсчет числа импульсов, выработанных генераторами 42, 43 за интервалы То и То* и формирование n-разрядных кодов N1 = To˙f и N2 = To*˙f (фиг. 5, з, к), разность которых ΔN = | N1 - N2 | отражает разность частот Δf = | fo - fo* | , несущую информацию о текущем перемещении объекта. По срезу импульсов D-триггеров 36, 37 запускаются одновибраторы 39, 40 (фиг. 5, л, м), переключая в исходное состояние D-триггеры 34, 35, что приводит к блокированию входных логических элементов 31, 32 И-НЕ. Сигналы формирователя 12 импульсов и усилителя-формирователя 11 считывания с этого момента не проходят в ЦИРЧ 15 и не изменяют его состояние. Сигналы D-триггеров 36, 37 далее логически перемножаются на элементе 38 ИЛИ и по их срезу (фиг. 5. н) производится запуск третьего одновибратора 41, который устанавливает в исходное состояние триггер 14 управления ВБ 13 преобразователя (фиг. 5. г). По шине 18 выставляется сигнал "Запрос".
С выходов счетчиков 44, 45 коды N1, N2 поступают на первые и вторые группы входов цифровых компаратора 46 и коммутатора 48. Компаратор 46 выполняет поразрядное сравнение указанных кодов и вырабатывает сигналы "больше" и равно", которые через элемент 47 ИЛИ поступают на управляющий вход коммутатора 48. Это условие позволяет коммутатору 48 передавать на первую и вторую группы входов вычитателя 49 коды N1 и N2 в однозначной последовательности для вычисления результирующего кода искомого перемещения независимо от направления перемещения объекта, а именно
Nx = |N1 - N2| = |To - To*|˙f; (2) Вычисленный код (2) далее проходит на информационные входы формирователя 16 знака перемещения ВБ 13 преобразователя и шины 20 данных, формируя сигнал "Перемещение".
По сигналу "Запуск" в следующем цикле преобразования код текущего цикла преобразования заносится в буферный регистр формирователя 16 знака перемещения и сравнивается с последующим результирующим кодом Nx.1на компараторе (на фиг. 1 не показано). В результате на его выходах будет сформирован код знака перемещения, равный
Nзн= Nx.1-Nx = 




 (3) который проходит на шины 21 знака перемещения с выставлением сигнала "Знак перемещения".
(3) который проходит на шины 21 знака перемещения с выставлением сигнала "Знак перемещения".
На этом цикл преобразования перемещения в код (2) завершается и преобразователь переходит в режим ожидания очередного цикла преобразования, который выполняется без изменения согласно описанного алгоритма. Частота подачи запускающего импульса "Запуск" определяется временем переходных процессов в счетчиках 44, 45, компараторах 46, 47, коммутаторе 48 и вычитателе 49 цифрового измерителя 15 разности частот (фиг. 4) и не связана с временем трансляции волны через среду звукопровода 1 МПП, вследствие использования метода частотно-временного преобразования с ЛЧМ-кодированием (ЛЧМ-линейная частотная модуляция). Это позволяет повысить быстродействие преобразования перемещений приблизительно в (Тх/Тк+1) раза относительно прототипа, где Тк - время кодирования интервалов То, То* сравниваемых частот, Тх - верхний диапазон преобразования перемещений.
Воздействие акустических полей на МПП преобразователя в процессе его работы в реальных условиях вызывает искажение формы динамической магнитострикционной мерной шкалы, формируемой в среде акустического тракта преобразователя, что ведет к снижению точности и надежности. Для уменьшения их влияния МПП преобразователя (фиг. 1) выполнен по компенсационной кинематической схеме. Так, при воздействии акустических (а также и электромагнитных) помех на выводах второго и третьего сосредоточенных элементов 6, 7 считывания наводятся сигналы fn, которые проходят на входы усилителя-формирователя 11 считывания и взаимокомпенсируются дифференциальными усилителями 22, 23, 24 (фиг. 2). Эффективность подавления помех зависит от идентичности электрических и геометрических параметров элементов 5, 6, 7 считывания и акустических трактов 1, 2 МПП. Данный подход позволяет уменьшить искажения формы магнитострикционной мерной шкалы преобразователя, а использование упругих волн кручения нулевого порядка - устранить влияние дисперсии скорости волны. В результате повышается точность преобразования по сравнению с прототипом.
(56) Авторское свидетельство СССР N 1158865, кл. G 01 B 17/00, 1985.
Авторское свидетельство СССР N 1640546, кл. G 01 B 17/00, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2039929C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| Ультразвуковой измерительный преобразователь параметров движения | 1988 |
|
SU1613855A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2318186C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2299401C2 |
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| УЛЬТРАЗВУКОВОЙ НАКЛОНОМЕР | 1991 |
|
RU1811265C |



Цель: повышение точности и быстродействия преоразования линейных перемещений в код. Сущность изобретения: состоит из основного и дополнительного прямолинейных магнитострикционных звукопроводов (1), (2), двух акустических поглотителей (3), (4), трех сосредоточенных элементов считывания (5), (6), (7), поляризатора (8), двух ограничителей перемещений (9), усилителя записи (10), усилителя-формирователя считывания (11), формирователя импульсов (12), вычислительного блока (13), состоящего из триггера управления (14), цифрового измерителя разности частот (15), формирователя знака перемещения (16), содержит шину разрешения (17), шину запроса (18), шину запуска (19), n-шины данных (20) и m-шины знака перемещения (21). Положительный эффект: повышение точности и быстродействия преобразования. 6 ил.
УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ, содержащий два параллельных звукопровода из магнитострикционного материала, закрепленных в акустических поглотителях, с внутренней стороны первого из которых на звукопроводах друг против друга неподвижно установлены первый и второй сосредоточенные элементы считывания, выходы которых соединены с первым и вторым входами усилителя-формирователя считывания, выход которого соединен с первым информационным входом вычислительного блока, первый и второй управляющие входы которого подключены соответственно к шине запуска и шине разрешения, которая соединена с входом формирователя импульсов, выход которого соединен с входом усилителя записи, выход вычислительного блока соединен с шиной запроса, а первая группа выходов соединена с шинами данных, два ограничителя перемещений, закрепленных на границах рабочего участка первого звукопровода, и третий элемент считывания, отличающийся тем, что в него введен поляризатор, формирователь импульсов выполнен в виде генератора качающей частоты, вычислительный блок содержит цифровой измеритель разности частот, триггер управления и формирователь знака перемещения, а третий элемент считывания неподвижно установлен на первом звукопроводе с наружной стороны первого акустического поглотителя, выход третьего элемента считывания соединен с третьим входом усилителя-формирователя считывания, расположенный с наружной стороны первого акустического поглотителя конец первого звукопровода подключен к выходу усилителя записи, один сигнальный вход цифрового измерителя разности частот является первым информационным входом вычислительного блока, вторым информационным входом которого является другой сигнальный вход цифрового измерителя разности частот, который подключен к выходу генератора качающей частоты, вход синхронизации формирователя знака перемещения является первым управляющим входом вычислительного блока и соединен с входом установки в единичное состояние триггера управления и с первым управляющим входом цифрового измерителя разности частот, второй управляющий вход которого является вторым управляющим входом вычислительного блока, выход соединен с входом установки в нулевое состояние триггера управления, инверсный выход которого является выходом вычислительного блока, а прямой выход соединен с третьим управляющим входом цифрового измерителя разности частот, группа выходов которого является первой группой выходов вычислительного блока и соединена с информационными входами формирователя знака перемещения, выходы которого являются выходами кода знака вычислительного блока, поляризатор установлен на первом звукопроводе с возможностью перемещения вдоль него между ограничителями перемещения и является кинематическим входом преобразователя.
