Изобретение относится к измерительной технике и предназначено для измерения и контроля параметров движения приводов технологического оборудования с высокой достоверностью.
Известен ультразвуковой преобразователь линейных перемещений, содержащий прямолинейный магнитострикционный звукопровод, ограниченный акустическими демпферами, систему продольного натяжения, передающую и принимающую цепи [1] .
Известен другой ультразвуковой преобразователь линейных перемещений, который содержит первичный магнитострикционный преобразователь перемещений, включающий прямолинейный магнитострикционный звукопровод с акустическим демпфером, пьезоэлектрическим волновым генератором, элементом и усилителем считывания, и растянутый стабилизатором продольного нагружения, а также вычислительный блок [2].
Известные устройства используют продольные несущие ультразвуковые волны, имеют системы продольного нагружения, которые не обеспечивают требуемых точности, надежности преобразования сигнальной информации в силу известных причин.
Известен ультразвуковой преобразователь линейных перемещений, выбранный в качестве прототипа, который содержит первичный магнитострикционный преобразователь перемещений, включающий прямолинейный магнитострикционный звукопровод, заключенный в акустические демпферы и растянутый в осевом направлении посредством стабилизатора продольного нагружения, двух ограничителей перемещений, элементы и усилители записи и считывания, и вычислительный блок [3].
Основными недостатками данного устройства являются недостаточные точность и надежность преобразования перемещения в код из-за влияния ряда дестабилизирующих факторов среды (температура, акустические и электромагнитные помехи) на несущую продольную акустическую волну.
Задачей, на решение которой направлено предлагаемое изобретение, является повышение точности и надежности преобразования перемещений в код.
Эта цель достигается тем, что в ультразвуковой преобразователь линейных перемещений, содержащий первичный магнитострикционный преобразователь перемещений, состоящий из прямолинейного магнитострикционного звукопровода, заключенного с обеих сторон в акустические демпферы, двух ограничителей перемещений, сосредоточенного элемента считывания, закрепленного неподвижно на одном из концов звукопровода, усилители записи и считывания, подсоединенные к первому и второму информационным входам вычислительного блока, его первые, вторые, третий и четвертый выходы подключены соответственно к шинам результата, контроля перемещения, запроса и контроля результата, управляющий вход усилителя записи подключен к шине управления, а вход усилителя считывания соединен с выводом элемента считывания, введены поляризатор, закрепленный с возможностью перемещения вдоль звукопровода между ограничителями перемещений и кинематически подключенный к объекту контроля, и стабилизатор углового скручивания звукопровода, неподвижно закрепленный на противоположной от поляризатора стороне звукопровода, на его свободном конце вблизи акустического демпфера и элемента считывания.
На фиг. 1 приведена структурная схема ультразвукового преобразователя линейных перемещений, на фиг.2 - выполнение его МПП с отражающей нагрузкой, на фиг.3 - вариант выполнения вычислительного блока преобразователя.
Ультразвуковой преобразователь линейных перемещений содержит первичный магнитострикционный преобразователь перемещений (МПП), который состоит из прямолинейного магнитострикционного звукопровода 1, двух однотипных акустический демпферов 2, стабилизатора 3 углового скручивания звукопровода (СУС), подвижного поляризатора 4, выполненного в виде постоянного магнита, двух ограничителей 5 перемещений, неподвижного сосредоточенного элемента 6 считывания, а также усилитель 7 записи и усилитель 8 считывания, вычислительный блок 9 (ВБ), шину 10 управления, n-разрядную шину 11 результата, m-разрядную шину 12 контроля перемещения, шину 13 запроса и шину 14 контроля результата.
Звукопровод 1 МПП заключен с обеих сторон в акустические демпферы 2. Вблизи одного из них установлены стабилизатор 3 углового скручивания звукопровода и элемент 6 считывания, выводы которого подключены к одному информационному входу вычислительного блока 9 через усилитель 8 считывания. Другой его информационный вход через усилитель 7 записи и второй акустический демпфер 2 подключен к звукопроводу 1 МПП. Соосно со звукопроводом 1 закреплен поляризатор 4 с возможностью перемещения между ограничителями 5 перемещений и кинематически подключен к контролируемому объекту. Управляющий вход усилителя 7 записи подключен к шине 10 управления. Первые, вторые, третий и четвертый выходы блока 9 подключены к шинам 11 результата, шинам 12 контроля перемещений, шине 13 запроса и шине 14 контроля результата соответственно.
Ультразвуковой преобразователь линейных перемещений работает следующим образом.
Первоначально преобразователь (фиг. 1) находится в исходном состоянии. При подаче сигнала "Запуск" по шине 10 управления срабатывает усилитель 7 записи, который посылает токовый видеоимпульс в среду звукопровода 1 МПП. Другим его синфазным сигналом запускается вычислительный блок 9 преобразователя, связанный со стабилизатором 3 углового скручивания.
По сигналу записи усилителя 7 в напряженном стабилизатором 3 углового скручивания магнитострикционном звукопроводе 1 под поляризатором 4 формируется упругая ультразвуковая крутильная волна повышенной амплитуды. Одна фаза волны (несущая) распространяется со скоростью Uкр в сторону неподвижного элемента 6 считывания (сигнальный магнитострикционный преобразователь), расположенного на искомом расстоянии Lx, и через время, равное Tx=Lx/Uкp, будет им считано. На его выводе в результате будет сформирован импульсный аналоговый двухполярный сигнал, который усиливается по амплитуде и преобразуется в короткий видеоимпульс усилителем 8 считывания. Этим сигналом считывания останавливается работа ВБ 9 по цифровому кодированию искомого временного интервала Тх перемещения объекта, и в следующий момент на его выходах формируются: n-разрядный код линейного перемещения Nx=Tx•f0, где f0 - частота дискретизации временного интервала, m - разрядный код знака перемещения, равный:
где Nx, Nx* - смежные результаты вычисленного перемещения объекта, в виде сигналов "Перемещение" и "Знак перемещения", сигналы "Запрос" и "Ошибка". Эти сигналы выставляются по шинам 11-14 результата, контроля перемещения, запроса и контроля результата преобразователя соответственно.
Распространяясь далее, эта упругая волна кручения, минуя сосредоточенный элемент 6 считывания, достигает акустический демпфер 2 и рассеивает свою энергию. Другая фаза упругой волны от поляризатора 4 распространяется в противоположную сторону по звукопроводу 1 МПП и в некоторый момент времени рассеивается на втором акустическом демпфере 2. Следовательно, предотвращается образование и накопления отраженных ультразвуковых волн в акустическом тракте преобразователя, выступающие в данном случае как сигналы помехи.
Устанавливая требуемое напряжение в магнитострикционном звукопроводе 1 МПП с помощью СУС 3 - по направлению или против направления движения крутильной волны - носителя, через угловое скручивание можно повысить амплитудное значение электрического сигнала считывания Ucч на выводах усилителя 8 считывания без искажений и увеличения энергетических затрат на его формирование. Это позволяет повысить точность и надежность преобразования линейных перемещений в код по сравнению с выбранным прототипом.
На этом процесс преобразования линейного перемещения в код завершается и преобразователь находится в режиме ожидания к следующему циклу преобразования, который выполняется аналогично рассмотренному при поступлении очередного сигнала "Запуск" по шине 10 управления, т.е. преобразователь (фиг.1) работает в асинхронном режиме в составе технологического оборудования.
Ультразвуковой преобразователь линейных перемещений по фиг.1 работает на падающих волнах кручения и имеет "одинарную" разрешающую способность, определяемую базой Б=1 акустического тракта (Lxmax) МПП и частотой f0 дискретизации временного интервала Тх перемещения. Использование МПП на отраженных упругих волнах (фиг.2) за счет применения отражателя 15 ультразвуковых волн вместо одного из акустических демпферов 2 преобразователя позволяет при тех же габаритных размерах акустического тракта и частоте fo дискретизации в 2 раза увеличить его базу - Б=2, т.е.
Tx=T2-T1=[(2Lх+L1)/Uкp-L1/Uкр]=2•Lх/Uкp,
где L1 - расстояние между поляризатором 4 и элементом 6 считывания. Дискретизация Тх в ВБ 9 преобразователя осуществляется аналогично рассмотренному, только падающая волна МПП обозначает начало преобразования Tх-->Nх, а отраженная - его окончание (см.фиг 2).
Вычислительный блок 9 (фиг.3) преобразователя содержит формирователь 16 начального сброса, логический элемент И 17, два D-триггера 18, 19, RS-триггер 20, измерительный генератор 21, двоичный суммирующий счетчик 22, регистр 23 параллельного сдвига, цифровой компаратор 24 (схема поразрядного сравнения) и цифровую линию 25 задержки (на логических элементах с RC-цепями). Работает блок следующим образом.
При подаче питающего напряжения формирователь 16 вырабатывает короткий отрицательной полярности импульсный сигнал, которым устанавливается в исходное состояние триггер 19 (Qн=1) и триггер 18 (Qн=0). Сигнал триггера 19 блокирует элемент И 17, и на входы триггеров 18 и 19 по цепи 8 считывания не поступают в этот момент сигналы.
Триггер 18 блокирует работу измерительного высокостабильного (кварцевого) генератора 21 и выставляет по шине 13 сигнал "Запрос". В ответ на этот сигнал по шине 10 подается сигнал "Запуск", запускается усилитель 7 записи, обозначающий начало цикла преобразования перемещения.
По сигналу усилителя 7 записи (Запись) обозначается RS-триггер 20, в регистр 23 заносится код предыдущего (смежного) кода Nх* по выходам счетчика 22 (кроме самого первого цикла преобразования, т.к. Nх - неопределен), и в следующий момент, задержанному элементом 25 по первому выходу осуществляется сброс (Q=0) счетчика 22, подготавливая его к началу цикла текущего преобразования. После этого по этому же сигналу, задержанному элементом 25 по второму выходу на время переходных процессов в МПП, устанавливаются в Q=0 и Q=1 триггеры 19 и 18 соответственно.
Это приводит к разблокированию логического элемента И 17 и запуску измерительного генератора 21. Он вырабатывает серию высокостабильных счетных импульсов частоты f0, которые подсчитываются счетчиком 22. Этот процесс завершается с приходом сигнала считывания от усилителя 8 считывания. Он проходит через логический элемент И 17 и устанавливает в исходные состояния триггер 18 (Q=0) и триггер 19 (Q=1). Блокируются работа генератора 21 и логического элемента И 17.
В результате на n-выходах счетчика 22 в следующий момент устанавливается код Nx искомого перемещения текущего значения и подается на шины 11, входы регистра 23 и компаратора 24. Последний, сравнивая коды Nx и Nx* смежных циклов преобразований, вырабатывает m-разрядный код Nзн знака перемещения и посылает его на шины 12.
В случае отсутствия сигнала по выходу усилителя 8 считывания работа генератора 21 не будет остановлена, что приведет к переполнению разрядной сетки счетчика 22 и вызовет появление недостоверного результата. В этом случае сработает RS-триггер (Q= 1) и сформирует по шине 14 сигнал ошибки, который известит пользователя о нарушении в работе преобразователя.
Таким образом, предлагаемый подход, связанный с наложением статических напряжений скручивания на магнитострикционный звукопровод преобразователя, позволяет без дополнительных энергетических сигналообразующих затрат обеспечить значительное увеличение отношения сигнал/помеха и жесткость акустического тракта его МПП. А значит, повысить устойчивость к дестабилизирующим факторам среды, улучшив метрологические и динамические характеристики в целом. Одновременно повышается надежность преобразования перемещений и упрощается выполнение МПП устройства. Это существенно отличает предлагаемое устройство от прототипа и обеспечивает достижения положительного эффекта.
Источники информации
1. Пат. США 3046502, НКИ 333-30, 1962 г.
2. А.с. СССР 1552002, G 01 В 17/00, 11-90.
3. А.с. СССР 1645812, G 01 В 17/00, 16-91, прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2039929C1 |
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1619027A1 |
| Ультразвуковой измерительный преобразователь параметров движения | 1988 |
|
SU1613855A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| УЛЬТРАЗВУКОВОЙ НАКЛОНОМЕР | 1991 |
|
RU1811265C |
| Устройство для измерения перемещений | 1990 |
|
SU1758429A1 |


Использование: для измерения и контроля параметров движения приводов технологического оборудования. Сущность изобретения заключается в создании статических напряжений скручивания в прямолинейном магнитострикционном звукопроводе преобразователя и возбуждении в его среде нормальных волн кручения повышенной амплитуды без дополнительных энергетических затрат по цепи записи-считывания, выделении и кодировании временного интервала перемещения привода технологического оборудования. Преобразователь содержит магнитострикционный звукопровод (1), два акустических поглотителя (2), стабилизатор углового скручивания (3), подвижный поляризатор (4), два ограничителя перемещений (5), неподвижный элемент считывания (6), усилители записи (7) и считывания (8), вычислительный блок (9), входную (10) и выходные (11-13) шины. Изобретение обеспечивает повышение точности и надежности преобразования перемещений в код. 3 ил.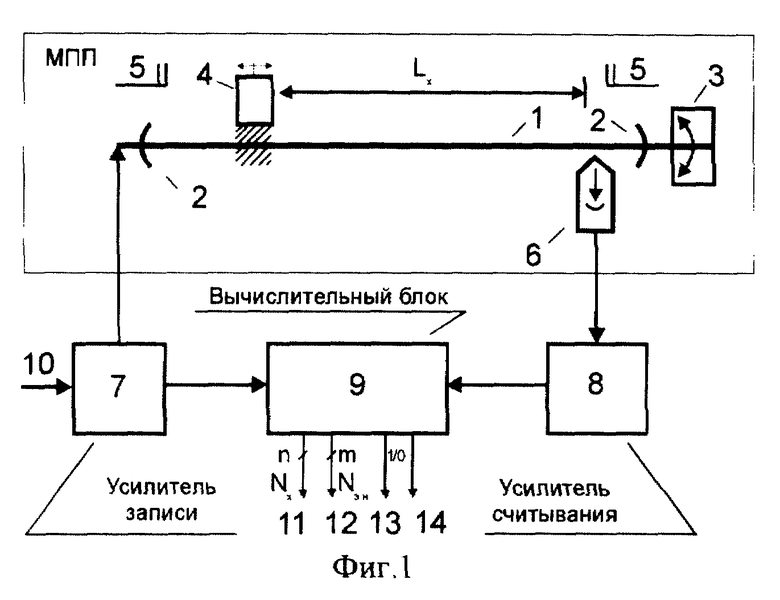
Ультразвуковой преобразователь линейных перемещений, содержащий первичный магнитострикционный преобразователь перемещений, состоящий из прямолинейного магнитострикционного звукопровода, заключенного с обеих сторон в акустические демпферы, двух ограничителей перемещений, сосредоточенного элемента считывания, закрепленного неподвижно на одном из концов звукопровода, усилители записи и считывания, подсоединенные к первому и второму информационным входам вычислительного блока, его первые, вторые, третий и четвертый выходы подключены соответственно к шинам результата, контроля перемещения, запроса и контроля результата, управляющий вход усилителя записи подключен к шине управления, а вход усилителя считывания соединен с выводом элемента считывания, отличающийся тем, что в него введены поляризатор, закрепленный с возможностью перемещения вдоль звукопровода между ограничителями перемещений и кинематически подключенный к объекту контроля, и стабилизатор углового скручивания, неподвижно закрепленный на противоположной от поляризатора стороне звукопровода вблизи акустического демпфера и элемента считывания.
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1679187A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1992 |
|
RU2080559C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2117914C1 |
| DE 3131455 A1, 24.03.1983. | |||
