Изобретение относится к измерительной технике и предназначено для измерения и контроля скорости угловых перемещений объекта.
Известен ультразвуковой преобразователь угловых перемещений, содержащий магнитострикционный преобразователь перемещений, состоящий из кольцеобразного звукопровода из магнитострикционного материала с акустическим поглотителем, входного и выходного электроакустических преобразователей, усилителя записи и усилителя считывания, формирователь импульсов, генератор синхроимпульсов, триггер управления, измерительный генератор синхроимпульсов, триггер управления, измерительный генератор, логический элемент И и счетчик [1].
Недостатком известного устройства является недостаточная точность измерения угловых перемещений из-за влияния акустических и тепловых полей на результирующий сигнал в процессе работы. Это снижает метрологические характеристики и ограничивает область использования. Так, например, акустические поля разной интенсивности, воздействуя на акустический тракт магнитострикционного преобразователя перемещений вызывают искажения формы информационного сигнала. А изменение температуры, изменяя исходное значение модуля упругости Е материала акустического тракта, вызывает дисперсию скорости упругой волны в широком диапазоне значений (до 30% и более в интервале температур ± 200оС).
Технический результат изобретения - повышение точности измерения скорости угловых перемещений объекта за счет уменьшения влияния дестабилизирующих факторов среды.
Указанное достигается тем, что в ультразвуковой преобразователь скорости угловых перемещений, содержащий магнитострикционный преобразователь перемещений, состоящий из кольцевого звукопровода из магнитострикционного материала, установленного на оси вращения объекта, на котором закреплен первый электроакустический преобразователь, усилитель считывания, подсоединенный к выводам второго электроакустического преобразователя, усилитель записи, счетчик результата, дополнительно введены второй кольцевой звукопровод из однотипного с первым звукопроводом магнитострикционного материала и равным радиусом закругления, закрепленный оппозитно на оси вращения объекта, на нем установлен второй электроакустический преобразователь, а также коммутатор, одновибратор, блок управления, измерительный генератор, счетчик циклов преобразования и триггер ошибки, его выход подключен к шине контроля результата, единичный вход соединен с выходом переноса счетчика результата, выходы которого подключены к шинам результата, а нулевой вход соединен с нулевыми входами счетчиков результата и циклов преобразования, другим входом коммутатора, входами схемы управления и одновибратора, и подключен к шине запуска, выход одновибратора соединен с входом усилителя записи, синхровход схемы управления соединен с выходом усилителя считывания, нулевой вход соединен с выходом переноса счетчиков циклов преобразования, выходы которого подключены к шинам циклов преобразования, а прямой выход соединен со счетным входом счетчика циклов преобразования и через измерительный генератор подключен к счетному входу счетчика результата.
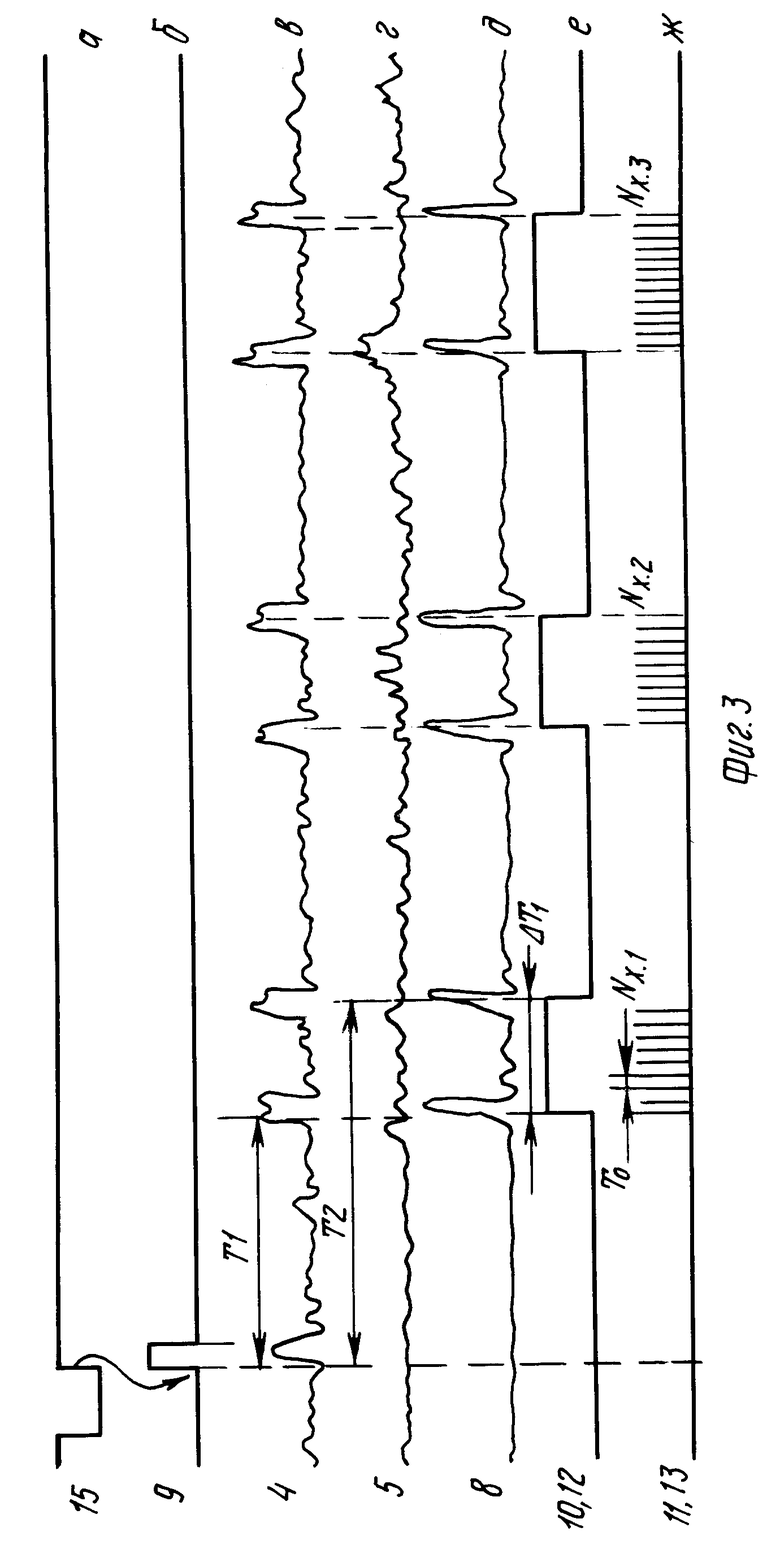
На фиг. 1 и 2 приведены блок-схемы ультразвукового преобразователя скорости угловых перемещений с разным выполнением его магнитострикционного преобразователя перемещений; на фиг. 3 показаны основные временные диаграммы, поясняющие принцип его работы.
Ультразвуковой преобразователь скорости угловых перемещений (фиг. 1) содержит магнитострикционный преобразователь перемещений (МПП), состоящий из первого и второго кольцеобразных звукопроводов 1, 2 равного радиуса R закругления из однотипного магнитострикционного материала, установленных оппозитно на опорном расстоянии lo друг от друга на оси 3 вращения объекта, первого и второго электроакустических преобразователей (ЭАП) 4, 5, коммутатора 6, усилителя 7 записи и усилителя 8 считывания, одновибратор 9, схема 10 управления, измерительный генератор 11, счетчик 12 циклов преобразования, счетчик 13 результата, триггер 14 ошибки, шину 15 запуска, m-шины 16 циклов преобразования, n-шины 17 результата и шину 18 контроля результата.
На первом 1 и втором 2 звукопроводах МПП закреплены соответственно первый 4 и второй 5 ЭАП. Выводы первого ЭАП 4 через коммутатор 6 подключены к одному входу усилителя 8 считывания. Другой его вход подсоединен к выводам второго ЭАП 5. Выход усилителя 8 считывания соединен с синхровходом схемы 10 управления. Ее управляющий вход соединен с одноименными входами коммутатора 6 и одновибратора 9, нулевыми входами счетчиков 12, 13 циклов преобразования и результата, триггера 14 ошибки и подключен к шине 15 запуска. Выход схемы 10 управления соединен с входом измерительного генератора 11 и прямым счетным входом счетчика 12 циклов преобразования. Его разрядные выходы подключены к шинам 16 циклов преобразования, а выход переноса соединен с нулевым входом схемы 10 управления. Прямой счетный вход счетчика 13 результата соединен с выходом измерительного генератора 11, разрядные выходы подключены к шинам 17 результата, а выход переноса соединен с единичным входом триггера 14 ошибки, выход которого подключен к шине 18 контроля результата. Выход одновибратора 9 через усилитель 7 записи подключен к другому входу коммутатора 6.
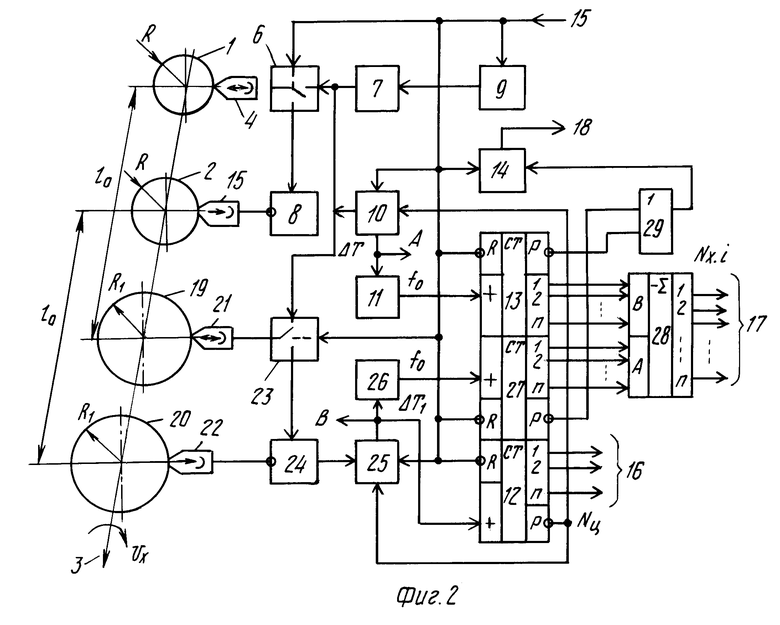
Кроме того, ультразвуковой преобразователь скорости угловых перемещений (фиг. 2) содержит МПП, в который дополнительно введены третий и четвертый кольцевые звукопроводы 19, 20 из того же магнитострикционного материала, что и первые два его звукопровода, но отличные от них радиусами изгиба, третий и четвертый ЭАП 21, 22, вторые коммутатор 23, усилитель 24 считывания, схема 25 управления, измерительный генератор 26, счетчик 27 результата, вычитатель 28 и логический элемент 29 ИЛИ.
Первый и второй звукопроводы 1, 2 МПП выполнены с одним радиусом R закругления, а третий и четвертый звукопроводы 19, 20 - с другим радиусом R1 закругления и закреплены оппозитно на опорном расстоянии lодруг от друга на оси 3 вращения объекта. На третьем и четвертом звукопроводах 19, 20 МПП закреплены соответственно третий и четвертый ЭАП 21 и 22. Выводы третьего ЭАП 21 подключены к одному входу второго усилителя 24 считывания через второй коммутатор 23, а выводы четвертого ЭАП 22 подключены к другому входу второго усилителя 24 считывания. Его выход соединен с синхровходом второй схемы 25 управления. Другой вход второго коммутатора 23 соединен с выходом усилителя 7 записи, а управляющий вход соединен с одноименным входом первой схемы 6 управления. Выход второй схемы 25 управления соединен с входом второго измерительного генератора 26 и счетным входом счетчика 12 циклов преобразования. Его выход переноса соединен с нулевым входом второй схемы 25 управления. Выход второго измерительного генератора 26 соединен с прямым счетным входом второго счетчика 27 результата, нулевой вход которого соединен с одноименным входом второй схемы 25 управления и подключен к шине 15 запуска. Информационные выходы первого и второго счетчиков 13, 27 результата подсоединены к соответствующим входам вычитателя 28. Его выходы подключены к шинам 17 результата. Выходы перекоса счетчиков 13 и 27 через логический элемент ИЛИ 29 подключены к единичному входу триггера 14 ошибки.
Ультразвуковой преобразователь скорости угловых перемещений работает следующим образом.
Первоначально преобразователь (фиг. 1) находится в исходном состоянии. По сигналу "Пуск" (фиг. 3а), выставленному по шине 15 запуска, производится установка в нулевые состояния триггера 14 ошибки, счетчиков 12, 13 циклов преобразования и результата, схемы 10 управления, переключение коммутатора 6 на режим записи. По фронту сигнала "Пуск" запускается одновибратор 9, который формирует видеоимпульс заданной длительности (фиг. 3.б) и возбуждает усилитель 7 записи. Его токовый сигнал проходит через коммутатор 6 на выводы первого ЭАП 4, переключая в следующий момент коммутатор 6 на режим чтения, и возбуждает под ним в среде первого магнитострикционного звукопровода 1 упругие нормальные волны продольных колебаний, вследствие магнитомеханического преобразования (эффект Джоуля). Упругие волны начинают распространяться в среде кольцевого звукопровода 1 МПП в обе стороны с фазовой скоростью vпр. Вращение звукопровода 1 с угловой скоростью vx вращения оси 3 приводит к тому, что циркулирующие в его среде упругие волны в обоих направлениях достигают и считываются первым ЭАП 4 (эффект Виллари) в разные моменты времени
T1 =  и T2 =
и T2 =  (1)
(1)
Сигналы считывания (фиг. 3в), подверженные воздействию акустических помех,
vx*(t) = vn(t) + v(t), (2) где vn(t) - сигнал помехи в момент времени t считывания;
v(t) - информационный сигнал без влияния акустических помех в момент считывания, проходят через коммутатор 6 на прямой вход усилителя 8 считывания. Второй ЭАП 5 5 МПП считывает сигналы акустических помех vn*(t), наведенные на втором магнитострикционном звукопроводе 2 МПП (фиг. 3г), вращающийся со скоростью vx оси 3 вращения объекта. Эти сигналы с выводов второго ЭАП 5 поступают на инверсный вход усилителя 8 считывания, где производится выделение информационного сигнала из фона помех (фиг. 3д) vx(t) = vx*(t) - vn*(t) = v(t) + [vn*(t) - vn(t)] (3) с последующим его преобразованием в прямоугольный видеоимпульс, которыми будет переключаться схема 10 управления.
На выходе схемы 10 управления формируются сигналы (фиг. 3е) длительностью, пропорциональной скорости vx вращения объекта
ΔT =  T1-T
T1-T = 4πR·
= 4πR·  = 4π
= 4π  vx
vx
(4) которые подсчитываются счетчиком 12 циклов преобразования, выставляются по внутренней шине А преобразователя и управляют работой измерительного генератора 11. На время их действия запускается измерительный генератор 11, вырабатывающий серии счетных импульсов опорной частоты fo = 1/To, которые подсчитываются и суммируются счетчиком 13 результата. Так будет продолжаться до тех пор, пока не сформируется код циклов преобразования по выходам счетчика 12
Nц = Tц·fм = 
 , K = 2m
, K = 2m
(5) и на его выходе переноса не появится сигнал, которым будет заблокирована схема 10 управления преобразователя. Время цикла Тц преобразования не превосходит времени циркуляции упругих волн в среде магнитострикционного звукопровода 1 МПП до их полного затухания и выбирается из этого условия. После чего возможен повторный запуск преобразователя. На n-выходах счетчика 13 результата будет сформирован код скорости vxугловых перемещений объекта (фиг. 3ж):
Nx = Nxi =
Nxi = (ΔT·fo)i
(ΔT·fo)i
(6)
В следующие моменты коды (5), (6) выставляются по шинам 16, 17 преобразователя, обозначая сигналы "Циклы" и "Скорость" соответственно. На этом цикл преобразования завершается, и преобразователь переходит в режим ожидания очередного цикла преобразования, который выполняется по сигналу "Пуск" согласно описанному алгоритму.
При переполнении разрядной сетки счетчика 13 результата на его выходе переноса формируется сигнал, который переключает триггер 14 ошибки в единичное состояние, и по шине 18 контроля результата выставляется сигнал "Ошибка", подтверждающий недостоверность измерительной информации по шинам 17 преобразователя в текущем цикле преобразования.
Область использования преобразователя по фиг. 1 ограничена, вследствие влияния температурных полей, которые существенно изменяют фазовую скорость упругих колебаний в акустическом тракте, а значит изменяют точность измерения. Применение прецизионных ферросплавов, например, 42НХТЮ, 44НХТЮ и др. , позволяет гарантировать заданную точность измерения перемещений в известном интервале температур среды. На фиг. 2 приведен преобразователь скорости угловых перемещений, лишенный указанных недостатков. Здесь могут быть использованы недорогостоящие элинварные ферросплавы и поддерживаться заданные точностные характеристики в более широком температурном диапазоне, чем это имеет место у рассмотренного преобразователя. Остановимся на отличительных моментах в его работе.
В исходном состоянии преобразователя (фиг. 2) его первый и второй коммутаторы 6 и 23 переведены в режим записи. По сигналу "Пуск" усилитель 7 записи через коммутаторы 6, 23, первый и третий ЭАП 4, 21 возбуждает в средах первого и третьего кольцевых звукопроводов 1, 19 разных радиусов R, R1 закругления упругие волны продольных колебаний, которые с этого времени начинают циркулировать в течение всего времени Тц цикла преобразования перемещений. Сигналы, считанные ЭАП 4, 5 и 21, 22 с вращающихся звукопроводов 1, 2 и 19, 20 МПП с угловой скоростью объекта, проходят соответственно на дифференциальные входы первого и второго усилителей 8 и 24 считывания (3) через коммутаторы 6 и 23, преобразуются в прямоугольные видеоимпульсы, которыми переключаются первая и вторая схемы 10 и 25 управления. На их выходах, следовательно, будут формироваться временные интервалы длительностей (4),
ΔT =  T1-T
T1-T = 4πR·
= 4πR·  ≈ 4π
≈ 4π  vx
vx
(8)
ΔT1=  T3-T
T3-T = 4πR1·
= 4πR1·  ≈ 4π
≈ 4π  vx
vx
(9) несущие информацию об угловой скорости перемещения объекта в относительных значениях. Далее временные сигналы (8), (9) подаются на внутренние шины А и В преобразователя, проходят на управляющие входы первого и второго измерительных генераторов 11 и 26 и запускают из на время действия указанных сигналов. Генераторы 11, 25 вырабатывают серии счетных импульсов равных по частоте fo, которые проходят соответственно на прямые счетные входы первого и второго счетчиков 13 и 27 результата. В конце цикла преобразования на их выходах формируются коды скорости угловых перемещений объекта, считанные по акустическим трактам первого и третьего звукопроводов МПП
N1 = N1i =
N1i = (ΔT·fo)i
(ΔT·fo)i
(10)
N2 = N2i =
N2i = (ΔT1·fo)i
(ΔT1·fo)i
(11)
С выходов счетчиков 13, 27 коды (10), (11) поступают на входы комбинационного вычитателя 28, где вычисляется результирующий код скорости угловых перемещений объекта за время Тц, равный:
Nx = N2-N1 = 4
4 -
-  vx·f
vx·f
(12)
Код (12) в следующий момент времени выставляется по шинам 17 результата. При переполнении разрядных сеток счетчиков 13, 27 на их выходах переноса формируются сигналы, которыми через логический элемент ИЛИ 29 устанавливается в единичное состояние триггер 14 ошибки. В конце цикла преобразования (5) по сигналу переноса счетчика 12 производится блокирование первой и второй схем 10, 25 управления, и работа преобразователя завершается.
Изменение температуры среды в широком диапазоне (от -200 до +400оС) однообразно изменяет фазовые скорости продольных упругих волн в средах звукопроводов 1, 2 и 19, 20 МПП и не сказывается на результирующий сигнал преобразователя (12), поскольку он вычисляется как разностная величина и зависит от значений радиусов изгиба Δ R = R1 - R звукопроводов преобразователя. В результате уменьшается влияние таких основных дестабилизирующих факторов среды, как тепловые и акустические помехи, а значит, имеет место повышение его точности по сравнению с прототипом при работе в жестких условиях среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2299401C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2318186C2 |
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2039929C1 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 2005 |
|
RU2298154C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 2002 |
|
RU2213940C1 |
| НАКЛОНОМЕР | 1991 |
|
RU2089850C1 |
Использование: в измерительной технике, в частности в ультразвуковых преобразователях для измерения и контроля скорости угловых перемещений объекта. Сущность изобретения: магнитострикционный преобразователь перемещений содержит два кольцевых звукопровода 1 и 2 из однотипного магнитострикционного материала с равными радиусами изгиба, оппозитно закрепленных на оси 3 вращения объекта, два электроакустических преобразователя 4 и 5, коммутатор 6, усилитель записи 7, усилитель считывания 8, одновибратор 9, триггер управления 10, измерительный генератор 11, два счетчика 12 и 13, триггер ошибки 14, входные и выходные шины 15, 16, 17 и 18. Преобразователь при работе позволяет уменьшить влияние аккустических и температурных полей. 1 з.п.ф-лы, 3 ил.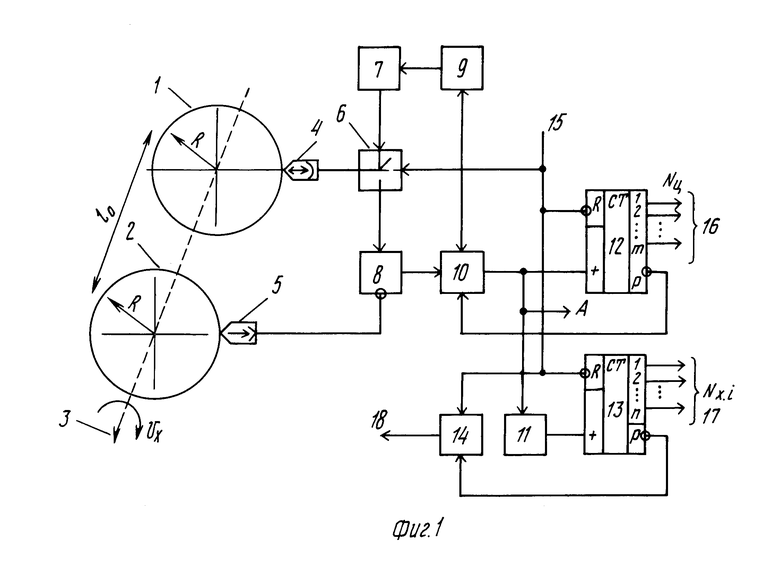
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Домрачев В.Г | |||
| и др | |||
| Схемотехника цифровых преобразователей перемещений | |||
| М.: Энергоатомиздат, 1987, с.71. | |||
