Изобретение относится к области испытаний. Преимущественная область применения - стендовая отработка управляемых ракет.
Экспериментальная отработка управляемых ракет в основном проводится путем летных испытаний с телеметрической передачей информации об их работе. Такой способ требует значительных материальных и временных затрат, а качество и объем информации не всегда удовлетворяют разработчиков.
В связи с этим возникает необходимость создания способов и устройств, позволяющих в стендовых условиях моделировать полет ракеты с работой всех ее узлов.
Известны способ измерения гироскопической устойчивости вращающихся снарядов и устройство, его реализующее [см. Патент США №446739 от 28.08.1984 г., МПК G01M 1/16 (1)]. Способ включает: закрепление снаряда на шаровой пневматической опоре таким образом, чтобы центр масс снаряда совпадал с радиальной осью шаровой опоры; раскручивание снаряда электродвигателем через разъединяемую муфту; разъединение муфты от снаряда; сообщение вращающемуся снаряду поперечного импульса силы; контроль реакции снаряда на приложенный импульс силы в зависимости от величины угловой скорости снаряда.
Способ реализуется устройством, включающим пневматическую трехстепенную опору вращения, в которой опорный сферический элемент имеет радиальный паз для установки снаряда с обеспечением совмещения центра масс снаряда с радиальной осью сферического элемента, электродвигатель с разъединяющей муфтой для раскрутки снаряда с последующим отсоединением двигателя от снаряда, электромагнитное устройство для нанесения поперечного толчка.
Вышерассмотренные способ и устройство для определения гироскопической устойчивости позволяют в стендовых условиях определять реакцию гиростабилизируемого снаряда на приложенный к нему боковой импульс.
Указанные способ и устройство для его реализации не позволяют проводить отработку в стендовых условиях управляемых ракет, частота вращения которых недостаточна для получения гироскопического эффекта требуемой величины.
Известен способ стендовой отработки ракет [см. Патент США №3314285 от 30.10.1964 г., НКИ 73-67 (2)], взятый за прототип предлагаемого изобретения, по которому ракету устанавливают на направляющей балке (стенде), запускают бортовую аппаратуру (циклограмму пуска) и она совершает полет на малое расстояние, а затем улавливается ловушкой, при этом измеряют и регистрируют параметры ракеты и по полученным данным судят о ее работоспособности.
Способ реализован в испытательном стенде для снятия взлетных характеристик ракет небольших тяг [2].
Стенд выполнен в виде направляющей балки для пуска ракеты, испытательной трассы малой длины и ловушки для спасения изделия и является микрополигоном, который обеспечивает ведение визуального наблюдения за полетом ракеты, измерение скорости, вибрации и ускорений на стартовом участке траектории (система измерений).
Ракета, установленная на направляющей балке, с помощью тросовой системы с демпферами связана с основанием (устройство установки), а измерительным кабелем соединена с системой регистрации.
Ловушка выполнена в виде объемной решетки из натянутых взаимно перпендикулярных нитей.
При пуске включается бортовая аппаратура ракеты (циклограмма пуска), освобождается замок, срабатывает двигатель и она сходит с направляющей балки (стенда) и летит до ловушки, увлекая за собой тросы и кабель, а затем перемещается в ловушке до тех пор, пока ее движение не будет ограничено рабочим ходом демпферов.
При этом происходит регистрация параметров бортовой аппаратуры ракеты, ее скорости, ускорений и вибраций.
Способ, микрополигон и стенд, его реализующие, позволяют оценить работоспособность ракеты только на стартовом участке траектории и не дают информацию о маршевом участке, которая является основной при отработке ракеты, так как время полета на маршевом участке намного больше стартового. К тому же, отсутствие вращения не дает возможность отрабатывать управляемые ракеты, для которых вращение обязательно.
Решаемой технической задачей предлагаемой группы изобретений является расширение функциональных возможностей за счет приближения условий стендовых испытаний к натурным путем имитации движения ракеты в луче системы управления на траектории.
Технический результат:
- получение информации о работоспособности ракетного комплекса в стендовых условиях, имитирующих реальный пуск ракеты;
- сохранение ракеты для анализа;
- многократное использование одной и той же ракеты путем замены отработанных узлов и перестройки программ управления.
Поставленная задача решается за счет того, что:
- в способе стендовой отработки управляемых по лазерному лучу ракет, включающем установку ракеты на стенде и запуск циклограммы пуска ракеты, мощность управляющего сигнала ракетой изменяют пропорционально расстоянию ракеты до цели и моделируют внешние воздействия, действующие на ракету в реальном полете, при этом контролируют работу системы управления ракеты и параметры внешних воздействий, а по реакции системы управления ракеты на контролируемые внешние воздействия судят о ее работоспособности;
- на микрополигоне для стендовой отработки управляемых по лазерному лучу ракет, включающем испытательную трассу, ракету и стенд для ее отработки, на испытательной трассе установлен прибор наведения, между прибором наведения и ракетой установлено устройство изменения мощности управляющего сигнала пропорционально расстоянию ракеты до цели, а ракета размещена на стенде, моделирующем внешние воздействия на ракету;
- на микрополигоне устройство изменения мощности управляющего сигнала выполнено в виде оптических фильтров различной проницаемости или отражающих поверхностей различной кривизны, установленных на оси привода вращения;
- в стенде для отработки управляемых по лазерному лучу ракет, содержащем устройство для установки ракеты, основание и систему измерений и регистрации параметров ракеты, устройство для установки ракеты выполнено в виде газовой турбины, ротор которой закреплен на ракете, а статор соединен с основанием через шарнир, обеспечивающий поворот ракеты в горизонтальной плоскости, и установленного на расстоянии от турбины дополнительного узла вращения, неподвижная обойма которого соединена через шарнир со стержнем маятника, ось которого установлена на вертикальной направляющей основания, а система измерений и регистрации дополнительно содержит датчики углового положения ракеты, вращения и положения ракеты по крену, связанные с регистрирующим комплексом;
- в стенде в дополнительном узле вращения выполнен кольцевой коллектор, соединенный с источником давления воздуха и блоком рулевого привода ракеты.
Изменение мощности управляющего сигнала пропорционально расстоянию до цели позволяет определить работоспособность фотоприемного устройства и ракеты в целом за время полета.
Контроль работы бортовой аппаратуры ракеты и параметров моделируемых внешних воздействий позволяет определить реакцию ракеты на внешние воздействия и ее соответствие требуемым величинам.
Выполнение устройства изменения управляющего сигнала в виде оптических фильтров или отражающих поверхностей различной кривизны дает возможность проводить отработку ракет на различном расстоянии от прибора наведения.
Моделирование внешних воздействий (вращения, колебаний, вибраций) позволяет приблизить условия стендовых испытаний к натурным пускам.
Использование газовой турбины для вращения позволяет проверить работоспособность ракеты при различных оборотах за счет изменения расхода газа и его давления, а также исключить электрические помехи, возникающие при работе привода с электродвигателем.
Введение в стенд маятниковой подвески дает возможность придать ракете колебательное движение в широком диапазоне амплитуд и частот за счет изменения длины стержня маятника и момента инерции.
Наличие воздушного коллектора в дополнительном узле вращения, соединенного с источником давления воздуха и блоком рулевого привода (БРП) ракеты, дает возможность проверить работу БРП при изменении расхода (давления) воздуха, то есть смоделировать различную скорость ракеты.
Предлагаемые изобретения поясняются графическими материалами, где показаны:
на Фиг.1 - общий вид микрополигона для отработки ракет, управляемых по отраженному лучу лазера (вид сверху);
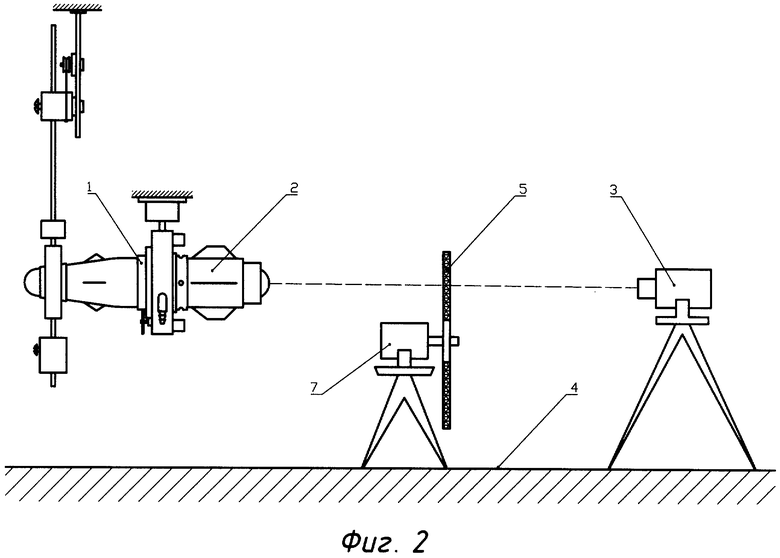
на Фиг.2 - общий вид микрополигона для отработки ракет, управляемых по лучу лазера (вид сбоку);
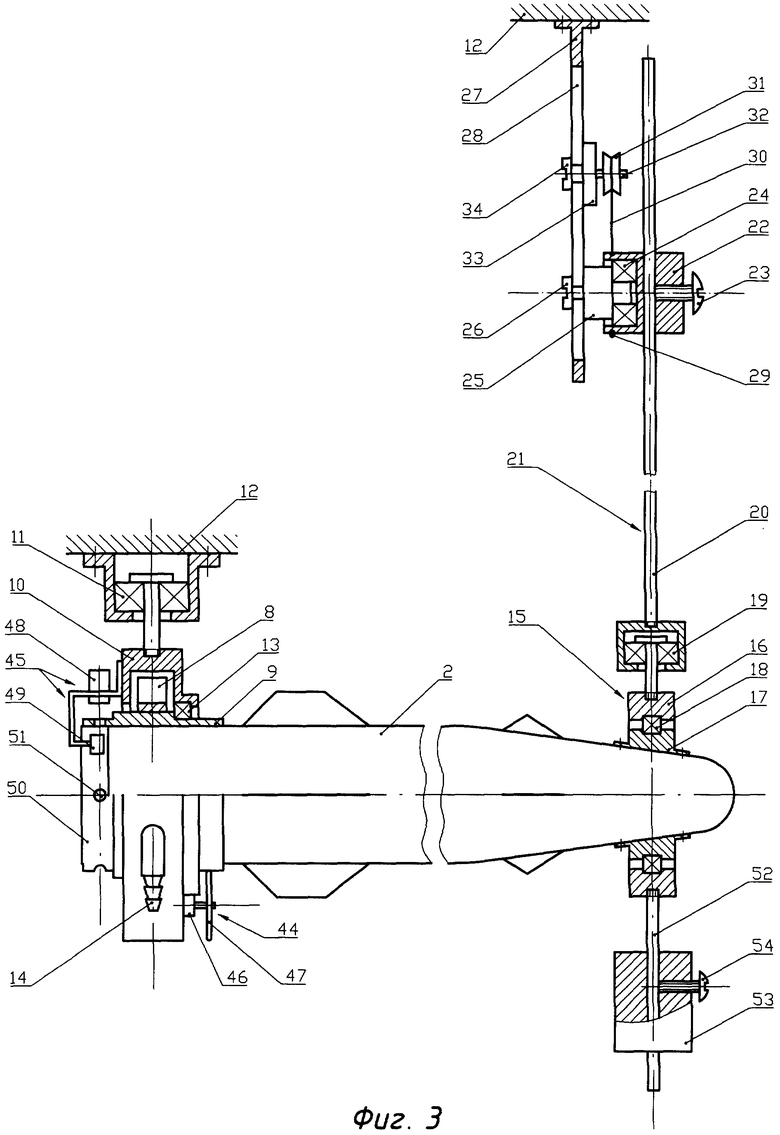
на Фиг.3 - общий вид стенда для отработки управляемых по лучу лазера ракет (вид сбоку);
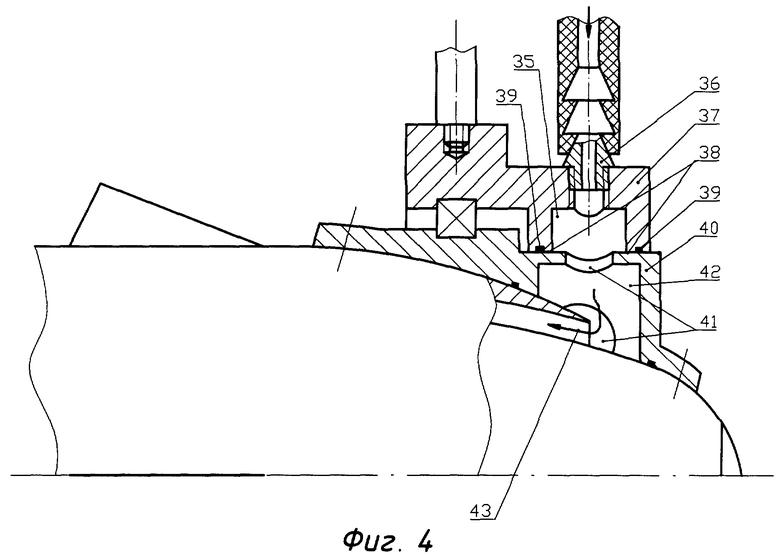
на Фиг.4 - дополнительный узел вращения с воздушным коллектором (разрез).
Микрополигон для реализации способа отработки управляемых по лазерному лучу ракет включает стенд 1 для отработки ракеты 2, прибор наведения 3, испытательную трассу 4 и устройство изменения пропорционально расстоянию ракеты до цели управляющего сигнала, выполненного в виде оптических фильтров 5 различной проницаемости для ракет с наведением по лучу лазера или в виде отражающих поверхностей 6 различной кривизны для ракет, управляемых по отраженному лучу лазера, установленных на оси привода вращения 7.
Стенд 1 для реализации способа стендовой отработки управляемых по лазерному лучу ракет состоит из силового привода в виде газовой турбины 8, ротор 9 которой жестко закреплен на ракете 2, а статор 10 через шарнир 11 связан с основанием 12.
Ротор 9 и статор 10 объединены между собой через подшипники 13. Шарнир 11 обеспечивает угловое перемещение ракеты в горизонтальной плоскости.
На статоре 10 выполнены штуцера 14 для подачи газа от источника высокого давления на турбину 8.
На расстоянии от силового привода установлен дополнительный узел вращения 15, состоящий из обоймы 16 и втулки 17, закрепленной на ракете 2, которые взаимодействуют между собой через подшипники 18. К обойме 16, с одной стороны, через шарнир 19 крепится стержень 20 маятника 21, а с противоположной стороны крепится направляющая 52 с грузом 53, предназначенным для изменения момента инерции качающейся части стенда. Фиксация груза 53 на направляющей 52 осуществляется винтом 54. В верхней части стержень 20 проходит через втулку 22 и фиксируется в ней винтом 23. Втулка 22 через подшипник 24 крепится на оси 25, которая фиксируется винтом 26 на направляющей 27 с пазом 28. Направляющая 27 крепится к основанию 12.
На втулке 22 выполнена проточка 29, куда входит ремень 30, кинематически соединяющий втулку 22 и шкив 31, установленный на оси 32 датчика 33 углового положения ракеты, который может перемещаться в пазу 28 направляющей 27 и фиксируется винтом 34.
Для отработки ракет с рулевым приводом, работающим от скоростного напора воздуха, дополнительный узел вращения выполняется с коллектором 35, в который подается воздух требуемого давления через штуцер 36 (фиг.4).
Коллектор выполнен в виде проточки 35 в обойме 37, контактирующей по краям 38 через уплотнение 39 со втулкой 40. Во втулке 40 выполнены отверстия 41, соединяющие коллектор 35 с кольцевой полостью 42, из которой воздух через заборники 43 ракеты попадает в рулевой привод.
Система измерений и регистрации микрополигона включает радиотелеметрическую систему определения параметров ракеты и датчики регистрации параметров внешних воздействий (углового положения ракеты 33, вращения 44 и положения ракеты по крену во времени 45), электрически связанные с регистрирующим комплексом.
Датчик вращения ракеты 44 состоит из тахогенератора 46, который через шкив 47 взаимодействует с вращающейся ракетой.
Датчик положения ракеты по крену во времени 45 состоит из источника света 48 и фотоприемника 49, установленных на статоре 10 привода, и цилиндра 50, скрепленного с ракетой 2. В цилиндре 50 выполнены отверстия 51, через которые свет попадает на фотоприемник 49.
Отверстия 51 выполнены разных диаметров, что обеспечивает различную величину сигнала на фотоприемнике.
Зная начальное положение ракеты относительно источника света - фотоприемника, по величине сигнала возможно определить положение ракеты по крену во времени при испытаниях.
Работа по предлагаемому способу (на примере способа для отработки управляемых по отраженному лазерному лучу ракет с рулевым приводом, работающим от скоростного напора воздуха) проводится следующим образом.
Ракета 2 устанавливается на стенде путем жесткого закрепления ротора 9 и втулки 17 на ней.
За счет перемещения стержня 20 маятника 21 во втулке 22 и оси 25 по пазу 28 направляющей 27 устанавливается длина стержня 20, обеспечивающая требуемую частоту угловых колебаний ракеты. Одновременно перемещается датчик 33 углового положения ракеты.
На трассе 4 устанавливаются прибор наведения 3 и устройство в виде поверхностей 6 различной кривизны, установленных на оси привода вращения 7.
После этого настраивают радиотелеметрическую систему измерения и регистрации параметров системы управления ракеты и проводят проверку функционирования ракеты и прибора наведения с помощью пультов проверок и подают команду на запуск циклограммы пуска (задействуют бортовые источники питания и затем бортовую аппаратуру и радиотелеметрию). После выхода бортовой аппаратуры на рабочий режим выполняют следующие операции:
- подают сжатый воздух на турбину 8 силового привода (имитация вращения ракеты);
- подают сжатый воздух в коллектор 35 дополнительного узла вращения 15 (имитация скоростного напора воздуха для работы рулевого привода);
- включают прибор наведения 3;
- устанавливают устройство изменения мощности управляющего сигнала на минимальное отражение (имитация максимальной дальности);
- придают ракете угловые колебательные движения требуемой амплитуды (имитация движения ракеты на траектории).
В процессе испытания дается команда на привод вращения 7 для поворота поверхностей 6, что позволяет увеличивать мощность отраженного управляющего сигнала (имитация уменьшения расстояния до цели).
При отработке ракет, управляемых по лазерному лучу, выполняются те же операции, но установка ракеты, прибора наведения и фильтров проводится по схеме фиг.2.
При испытаниях регистрируются параметры внешних воздействий (количество оборотов ракеты, ее положение по крену во времени, угловое положение ракеты относительно прибора наведения) и параметры бортовой аппаратуры системы управления ракеты.
Анализ испытаний сводится к определению реакции системы управления ракеты и бортовой аппаратуры на внешние воздействия и соответствия циклограммы пуска требуемой и по результатам делается вывод о работоспособности ракеты.
Предлагаемые изобретения позволяют проверять работоспособность ракеты в требуемом диапазоне ее оборотов, скоростного напора воздуха, отклонении ракеты от траектории и мощности управляющего сигнала, при этом сохраняется материальная часть для анализа и повторного использования путем замены блоков одноразового использования, что позволяет проводить качественную отработку управляемых ракет в стендовых условиях.
Источники информации
1. Патент США №4467639 от 28.08.1984 г., МПК G01M 1/16 - аналог.
2. Патент США №3314285 от 30.10.1964 г., НКИ 73-67 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПО ЛУЧУ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТОЙ И УПРАВЛЯЕМАЯ ПО ЛУЧУ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 2011 |
|
RU2460966C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| Двухсистемная управляемая ракета в транспортно-пусковом контейнере | 2023 |
|
RU2814065C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2436033C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| Управляемая ракета | 2022 |
|
RU2772089C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| ВРАЩАЮЩАЯСЯ КРЫЛАТАЯ РАКЕТА | 2014 |
|
RU2544446C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ С РАСКРЫВАЕМЫМИ ПОСЛЕ ПУСКА РУЛЯМИ | 2005 |
|
RU2297588C1 |
| УПРАВЛЯЕМАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2012 |
|
RU2518126C2 |
Группа изобретений относится к области испытаний. В способе ракету устанавливают на стенде, запускают циклограмму пуска, мощность управляющего сигнала изменяют пропорционально расстоянию ракеты до цели и моделируют внешние воздействия, действующие на ракету в реальном полете. Контролируют работу системы управления ракеты и параметры внешних воздействий, а по реакции системы управления ракеты на контролируемые внешние воздействия судят о ее работоспособности. Микрополигон включает испытательную трассу, ракету и стенд для отработки ракеты. На испытательной трассе устанавливают прибор наведения, между прибором наведения и ракетой устанавливают устройство изменения мощности управляющего сигнала пропорционально расстоянию ракеты до цели, а ракету размещают на стенде, моделирующем внешние воздействия на ракету. Устройство изменения мощности управляющего сигнала выполнено в виде оптических фильтров различной проницаемости или отражающих поверхностей различной кривизны, установленных на оси привода вращения. Стенд содержит устройство для установки ракеты, основание и систему измерений и регистрации параметров ракеты. Устройство для установки ракеты выполнено в виде газовой турбины, ротор которой закреплен на ракете, а статор соединен с основанием через шарнир, обеспечивающий повороты ракеты в горизонтальной плоскости, и дополнительного узла вращения, установленного на расстоянии от турбины. Неподвижная обойма дополнительного узла вращения соединена через шарнир со стержнем маятника, ось которого установлена на вертикальной направляющей основания. Система измерений и регистрации дополнительно содержит датчики углового положения ракеты, вращения и положения ракеты по крену, электрически связанные с регистрирующим комплексом. Изобретение обеспечивает стендовую отработку управляемых по лазерному лучу ракет в условиях, близких к реальному полету, при этом сохраняется материальная часть для анализа и повторного использования. 3 н. и 3 з.п. ф-лы, 4 ил.
| US 3314285 А, 18.04.1967 | |||
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
| US 4179823 A, 25.12.1979 | |||
| US 4751662 A, 14.06.1988. | |||

