Предлагаемое изобретение относится к области разработки систем наведения с телеориентированием ракеты в лазерном луче и может быть использовано в противотанковых ракетных комплексах (ПТРК), установленных на сухопутных и воздушных носителях.
В настоящее время известен способ наведения управляемой ракеты, реализованный, например, в противотанковых комплексах "Кастет", "Бастион", "Штурм", "Кобра" (Р.Д. Ангельский, Отечественные противотанковые комплексы, Москва, ACT, Астрель, 2002 г., стр.74-75, 84, 100, 111-114, [1]), включающий ориентирование пускового устройства с ракетой в направлении информационного поля управления, создаваемого лучом лазера, перемещение ракеты в поле управления посредством выстреливания из пускового устройства, последующие открытие приемника излучения, раскрытие рулей, формирование команд управления, пропорциональных координатам ракеты в поле управления, и отклонение рулей под действием команд управления. Основной особенностью телеориентирования в информационном поле управления луча лазера является то, что полет ракеты происходит в два этапа. На первом этапе ракета встреливается в информационное поле луча, а после ее входа в поле управления луча открывается бортовой приемник излучения и начинается второй этап, на котором ракета летит и управляется в поле управления.
Под полем управления здесь и далее понимается область определения координат ракеты относительно линии прицеливания и это может быть, например, поле зрения пеленгатора ракеты в командной системе управления, реализованной в комплексах "Штурм", "Кобра" или же информационное поле луча (радиолуча или луча лазера), формируемого прибором наведения в лучевой системе управления ракетой, реализованной в комплексах "Кастет", "Бастион", "Вихрь".
Выполнение операций известного способа наведения ракет осуществляется следующим образом.
Оператор, обнаружив цель, совмещает линию прицеливания (оптическую ось прицела) и совпадающую с ней нулевую ось аппаратуры определения координат (оптическую ось источника лазерного излучения) с точкой прицеливания и производит пуск ракеты. Перемещение ракеты в поле управления осуществляется посредством выстреливания из пускового устройства, ориентированного в направлении поля управления под заданными углами в горизонтальной и вертикальной плоскостях. Пусковым устройством может быть транспортно-пусковой контейнер, установленный на наземном или воздушном носителе или орудие танка.
После входа ракеты в поле управления начинает работать приемник излучения, установленный на ракете, и аппаратура определения координат воспринимает частотно-модулированное излучение лазера и, расшифровывая его, определяет координаты ракеты относительно оси информационного поля лазерного излучателя (т.е. относительно линии визирования цели).
Начало функционирования приемника излучения ракеты совпадает по времени с моментом раскрытия защитной крышки приемника излучения (роль защитной крышки может играть поддон ракеты (В.И. Бабичев, В.В. Ветров, А.В. Игнатов, А.Р. Орлов, Основы устройства и функционирования артиллерийских управляемых снарядов, изд. ТулГУ, Тула, 2003 г., с.71, [2]), сброс которого происходит после выхода ракеты из канала ствола орудия). После сброса поддона начинает функционировать приемник излучения и замыкаются контактные группы, одна из которых подает напряжение на электровоспламенитель механизма раскрытия рулей (механизм раскрытия рулей имеет пиротехнические приводы одноразового действия, работа которых основана на срабатывании электровоспламенителей с последующим преобразованием энергии расширяющихся газов в механическое перемещение ([2], с.61), и происходит раскрытие рулей.
Управляющие команды, пропорциональные координатам ракеты относительно оси луча, поступают на вход блока рулевых приводов. Рули блока рулевых приводов, отклоняясь относительно своего среднего положения, создают действующий на ракету управляющий момент, что приводит к возникновению сил, которые удерживают ракету около центра поля управления в течение всего времени полета ракеты до цели.
Описанный способ управления реализован, например, в управляемой в прямом луче лазера вращающейся по крену ракете "Рефлекс", которая выстреливается метательным устройством из канала ствола орудия, имеющей замыкатель, электрически связанный с механизмом раскрытия рулей рулевого привода (с.72-74, [2]).
Недостатком известного способа наведения являются значительное время подготовки к пуску, связанное с необходимостью разворота пускового устройства с помощью поворотного и подъемного механизмов наведения для установки строго определенных углов между направлением выстрела и линией визирования цели (ЛВЦ).
В качестве прототипа заявляемому способу выбран наиболее близкий по технической сущности к предлагаемому изобретению способ наведения, реализованный в ПТРК MAPATS (Высокоточное оружие зарубежных стран, том 1, противотанковые ракетные комплексы, обзорно-аналитический справочник, ГУП КБП, Тула, 2008 г., с.316-321), заключающийся в формировании лазерного луча с информационным полем управления, наведении оптического прицела и съюстированного с прицелом луча на цель, встреливании ракеты в луч, открытии приемника излучения, определении координат ракеты относительно оси информационного поля луча, формировании команд управления, пропорциональных координатам ракеты от оси информационного поля, раскрытии рулей и преобразовании команд управления в отклонения рулей.
Данная система наведения, устанавливаемая на подвижных носителях, например, на вертолетах, обладает следующими недостатками: значительным временем проведения операций, связанных с установками требуемых углов между направляющими пускового устройства и ЛВЦ; требованием мастерства летчика для установки требуемых углов посредством пилотирования вертолета; сравнительно низкой точностью установки требуемых углов; необходимостью перевода носителя в режим пикирования на цель при подготовке к стрельбе и осуществления запуска ракеты; значительным размером луча, который обусловлен значительным рассеиванием ракет при их запуске с низкими начальными скоростями.
Задачей предлагаемого изобретения является расширение диапазона условий применения ПТРК при стрельбе с воздушного носителя при повышенных ошибках прицеливания летчика без организации точного прицеливания пускового устройства относительно ЛВЦ маневрированием воздушным носителем, а также снижение требований к рассеиванию ракет на начальном участке наведения и уменьшение задымленности ЛВЦ.
Поставленная задача решается за счет того, что в способе наведения по оптическому лучу ракеты, стартующей с подвижного носителя, включающем формирование на носителе лазерного луча с информационным полем управления, наведение на цель оптического прицела, ось которого съюстирована с осью информационного поля лазерного луча, ориентирование оси пускового устройства в направлении оси информационного поля лазерного луча, пуск ракеты со сложенными аэродинамическими рулями и ввод ракеты в информационное поле лазерного луча, открытие на ракете приемника излучения и формирование сигналов, пропорциональных координатам ракеты относительно оси информационного поля лазерного луча, и преобразование их в команды управления, раскрытие аэродинамических рулей и преобразование команд управления в отклонения рулей, дополнительно в момент схода ракеты на носителе измеряют и запоминают угловое положение оси пускового устройства относительно связанной с носителем системы координат, а также угловое положение носителя относительно земной системы координат, раскрытие аэродинамических рулей осуществляют с временной задержкой относительно открытия приемника излучения, в момент открытия приемника излучения совмещают ось информационного поля лазерного луча с запомненным в момент схода ракеты положением оси пускового устройства, а в момент времени tнв, соответствующий моменту раскрытия рулей, начинают совмещение оси информационного поля лазерного луча с линией визирования цели по закону:
Δφву,z=0,5·Δφ°ву,z·[1+cos(ωву,z·(t-tнв))], при tнв<t≤tкву,z,
Δφву,z=0, при t>tкву,z,
где Δφву,z - текущие углы между осью информационного поля и линией визирования цели,
Δφ°ву,z - углы отворота оси информационного поля от линии визирования цели в момент открытия на ракете приемника излучения,
Δφвmу,z - максимальные угловые скорости вращения оси информационного поля в процессе совмещения;




tкву,z - время окончания совмещения,
tквy,z=tнв+Δtву,z,
где Δtву,z=π/ωву,z.
Предлагаемый способ наведения ракеты реализован в противотанковом комплексе "Вихрь", размещенном на вертолете. При работе противотанковым управляемым вооружением "Вихрь" с вертолета пилот при визуальном обнаружении цели с помощью нашлемной системы целеуказания ориентирует линию визирования комплекса "Шквал-В" в направлении цели и, переключив поле зрения с широкого на узкое (имеющее большее увеличение) производит распознавание цели и после определения принадлежности цели противнику принимает решение атаковать и выбирает оружие, ([1], с.171-179, Мазепов А. и др., "Ка-50", М., Любимая книга, 1997 г., с.84-91). Если выбрана в качестве оружия ракета, пилот кнюппелем на ручке управления вертолетом корректирует положение и размер прицельной марки на телевизионном индикаторе так, чтобы она лежала на цели, а цель занимала примерно Уд ее площади, а затем переводит аппаратуру в режим автосопровождения. При этом происходит измерение лазерным дальномером дальности до цели. Телеавтомат (ТА) запоминает образ цели и обеспечивает дальнейшее сопровождение. Система обеспечивает автоматическое сопровождение цели даже после кратковременного исчезновения ее изображения - например, в тех случаях, когда между вертолетом и целью, например, танком оказывается другой объект. В том случае, если все-таки имел место сбой автоматического слежения, летчик осуществляет повторный захват цели на автосопровождение. Пусковое устройство отрабатывает угол места цели. При достижении разрешенной дальности на индикаторе лобового стекла (ИЛС) и телевизионном индикаторе появляются сигналы, разрешающие открытие огня.
При стрельбе ракетой необходимо обеспечить встреливание ракеты в поле управления лазерного луча. Пилотированием вертолета летчик должен совместить на ИЛС символы линии визирования цели и зоны пуска. Если этого не происходит, то срабатывает блокировка и сигнал разрешения пуска ракеты не индицируется. Если ТА по какой-то причине потерял цель, то имеется возможность кнюппелем скорректировать положение прицельной марки на цели и вновь перейти на автосопровождение.
До внедрения предлагаемого изобретения ввод ракеты в информационное поле обеспечивался маневром (прицеливанием) вертолета, в процессе которого летчик, имея на индикаторе лобового стекла информацию об угловом положении линии визирования цели (оси ТА и съюстированной с ней оси информационного поля (ИП)) в виде "подвижной метки" и угловом положении пускового контейнера в виде "прицельной марки" с нанесенным вокруг нее кольцом зоны встреливания радиусом, например, 1°, воздействуя на органы управления вертолета, совмещал прицельную марку с подвижной меткой в вертикальной и горизонтальной плоскостях. При попадании подвижной метки в кольцо зоны встреливания летчик нажимал кнопку пуска ракеты и до момента ее схода обеспечивал удержание подвижной метки в кольце зоны встреливания (~0.8…1.0 с после нажатия кнопки).
Предлагаемый способ наведения позволяет осуществлять пуск ракеты без точного прицеливания маневрированием вертолета при реализации программной разъюстировки оси ИП луча управления относительно оси ТА в вертикальной и горизонтальной плоскостях. В момент схода ракеты фиксируется угловое положение вертолета ϑн0, ϑн0 и положение пускового устройства относительно строительной горизонтали фюзеляжа (СГФ) вертолета. В момент времени, соответствующий моменту открытия крышки приемника излучения, в оптическую схему прибора наведения вводятся два оптических клина, отводящих ось ИП к зафиксированному в момент пуска положению оси пускового устройства, обеспечивая тем самым "захват" ракеты на траектории.
Потребные углы отворота оси ИП относительно оси ТА для обеспечения ввода ракеты в ИП Δφ°ву, Δφ°вz в вертикальной и горизонтальной плоскостях должны вычисляться по зависимостям:
Δφ°ву=ϑн0-ϑн+ϑпу-φу-ΔΘ,
Δφ°вz=ψн0-ψн+ψпу-φz-Δφ,
где ϑн0, ψн0 - углы тангажа и рысканья вертолета в момент схода ракеты;
ϑн, ψн - текущие углы тангажа и рысканья вертолета;
ϑпу, ψпу - углы разворота оси пускового устройства относительно СГФ вертолета в вертикальной и горизонтальной плоскостях соответственно;
φу, φz - текущие углы разворота оси ТА относительно СГФ вертолета в вертикальной и горизонтальной плоскостях соответственно;
ΔΘ, Δφ - требуемые углы разворота оси пускового устройства относительно оси ИП в вертикальной и горизонтальной плоскостях соответственно в момент схода ракеты, рассчитываемые в вычислительном блоке носителя.
В момент времени tнв, соответствующий моменту открытия рулей, начинается совмещение оси ИП с линией визирования цели. В процессе совмещения угловые рассогласования Δφву,z должны изменяться по закону:
Δφву,z=0,5·Δφ°ву,z·[1+cos(ωву,z·(t-tнв))], при tнв<t≤tкву,z,
Δφву,z=0, при t>tкву,z,
где 
ωвmу,z - максимальные угловые скорости вращения оси ИП в процессе совмещения;




При ωву,z>π принимается ωву,z=π, а максимальная угловая скорость совмещения оси ИП определяется по зависимости:
tкву,z - время окончания совмещения:
tкву,z=tнв+Δtву,z,
где Δtву,z=π/ωву,z
Предлагаемое изобретение иллюстрируется рисунками.
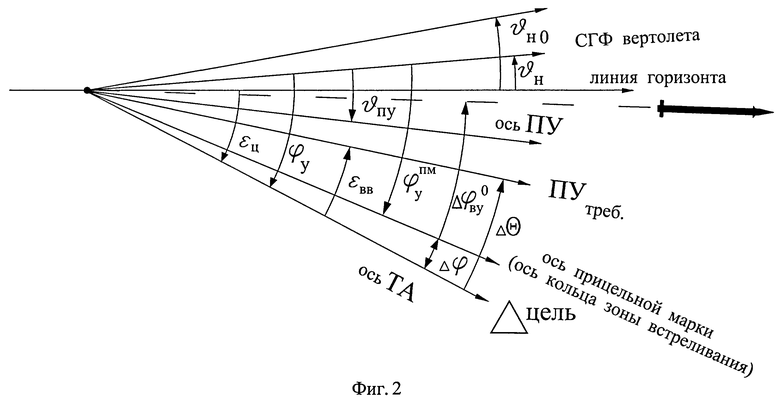
Фиг.1, 2 иллюстрируют взаимное угловое положение вертолета, осей телеавтомата, прибора наведения, пускового устройства, линии горизонта и цели (для вертикальной плоскости).
На фиг.1 показаны два положения ракеты на траектории: первое - положение ракеты на момент времени t=0.3 с, предшествующий моменту начала совмещения осей ИП и ТА, и второе - положение ракеты на момент окончания совмещения осей ИП и ТА. На фиг.2 отмечены:
εц - угол между линией цели и линией горизонта,
φY - между осью ТА (линией цели) и СГФ носителя,
φY ПМ - угол между осью прицельной марки и СГФ вертолета,
εВВ - расчетный угол отклонения ПУ относительно линии цели,
υн - угол между линией горизонта и СГФ вертолета,
υн0 - угол между линией горизонта и СГФ вертолета в момент пуска ракеты,
υПУ - угол между СГФ вертолета и осью пускового устройства,
Δφ°ву - требуемый угол отклонения оси ИП относительно оси ТА для обеспечения встреливания ракеты в ИП,
Δφ - ошибка наведения оси ИП луча,
ΔΘ - требуемое угловое положение ПУ относительно оси ИП.
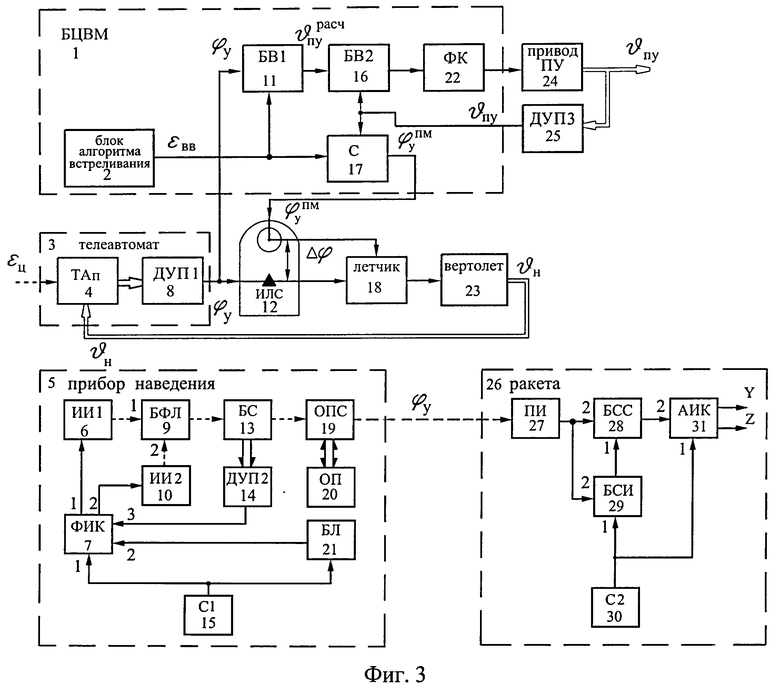
На фиг.3 приведена блок-схема системы наведения, реализующей предлагаемый способ наведения. На фиг.3 введены следующие обозначения: 1 - бортовая цифровая вычислительная машина (БЦВМ), в состав которой входят следующие блоки: 2 - блок алгоритма встреливания; 11, 16 - блоки вычитания (БВ1, БВ2); 17 - сумматор (С), 22 - формирователь команд (ФК) управления приводом пускового устройства. Блок алгоритма встреливания может быть выполнен из набора вычитающих блоков, сумматоров, блоков произведения и блоков хранения констант. Сумматоры и блоки вычитания выполнены по схеме рис.11.1 (У. Титце, К. Шенк, Полупроводниковая схемотехника, М., Мир, 1982 г., с.137, [3]). Блоки произведения могут быть выполнены по схеме четырехквадрантного умножения ([3], с.162, рис.11.41). Блоки хранения констант могут быть выполнены в виде постоянного запоминающего устройства ([3], с.125-127). Блок 24 - привод пускового устройства, блок 25 - датчик углового положения оси пускового устройства (ДУП3).
Система наведения включает в себя блок телеавтомата 3, который представляет собой телевизионную аппаратуру (ТАп.) 4, сопряженную с лазерным дальномером-целеуказателем и прибором наведения ракет по лазерному лучу 5 ([1], с.84-85). Телевизионная аппаратура комплекса имеет широкое и узкое поля зрения, углы отклонения линии визирования по азимуту ±35°, по углу места от +15° до -80°. Угловые отклонения оси телеавтомата посредством датчика углового положения 8 преобразуются в электрические сигналы. Датчики углового положения оси телеавтомата и оси пускового устройства могут быть выполнены, например, на основе фотоэлектрического преобразователя угла в код (Основы теории и проектирования вычислительных приборов и машин управления, под ред. Л.Н. Преснухина, М., Высшая школа, 1970 г., с.299, 325).
Телеавтомат может выполнять функции обзорно-поисковой системы. Линия визирования для поиска цели отклоняется автоматически или вручную от кнюппеля. После распознавания цели и ее захвата сопровождение цели осуществляется автоматически. Телеавтомат может быть выполнен на основе телевизионного визира, представленного в книге В.П.Демидова, Н.Ш.Кутыева, Управление зенитными ракетами, М., Военное издательство, 1989 г., с.184-186.
На индикаторе лобового стекла 12 отображается информация о положении цели и прицельной марки пускового устройства. На основе этой информации летчик (летчик, как элемент системы управления, обозначен на схеме блоком 18) должен обеспечить встреливание ракеты в поле зрения обзорно-поисковой системы. Пилотированием вертолета 23 он должен совместить на ИЛС символы линии визирования цели и зоны пуска. После пуска ПТУР летчик должен пилотировать вертолет в допустимых пределах углов отклонения линии визирования цели.
С осью телеавтомата съюстирована ось ИП лазерного луча, формируемого прибором наведения 5, включающего два импульсных источника (ИИ) 6, 10, формирователь импульсного кода (ФИК) 7, блок сканирования (БС) 13, датчик углового положения (ДУП2) оси луча 14, первый синхронизатор (С1) 15, блок литерности (БЛ) 21, оптическая панкратическая система (ОПС) 19, съюстированная с оптическим прицелом 20. Ракета представлена блоком 26, в состав которого входят приемник излучения (ПИ) 27, блок стробирования сигнала (БСС) 28, блок синхронизирующих импульсов (БСИ) 29, второй синхронизатор (С2) 30 и анализатор импульсного кода (АИК) 31. Устройство и работа прибора наведения раскрыты в описании изобретения, представленном в патенте РФ 2382315 "Система наведения управляемого снаряда".
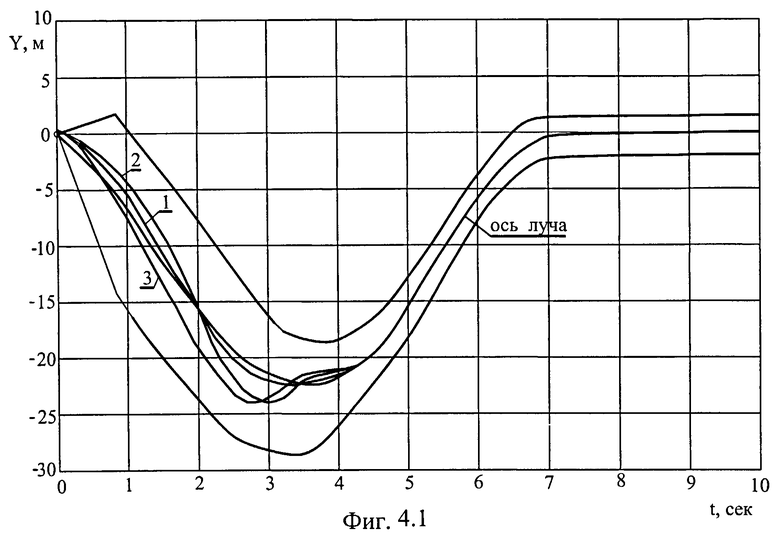
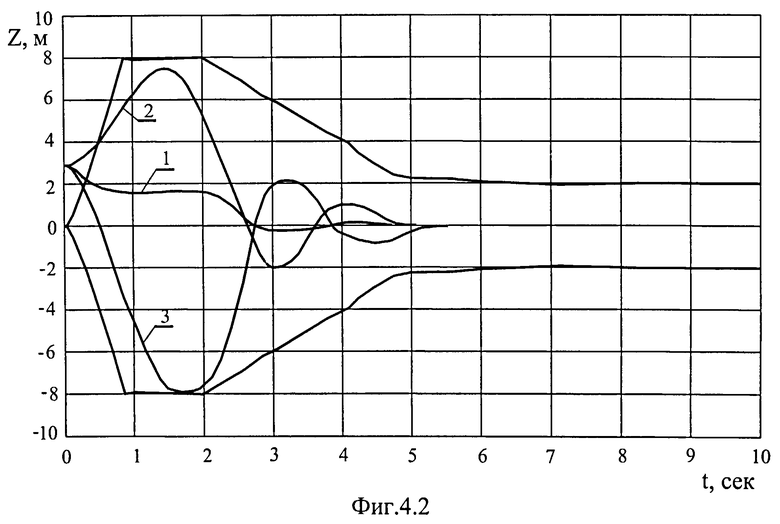
На фиг.4.1 и 4.2 приведены траектории ракеты "Вихрь" в вертикальной и горизонтальной плоскостях соответственно, полученные в результате математического моделирования процесса наведения при ошибках прицеливания летчика в вертикальной плоскости -2.5°, в горизонтальной плоскости ±1.0° в следующих условиях: температура заряда, воздуха Тз,в=20°С; боковой ветер Wz=±10 м/с. Начальные возмущения при сходе ракеты: 
Траектория 1 получена для условий: Θ0=1.5°, φ0=-0.7°, 

Траектория 2 получена для условий: Θ0=1.5°+0.33°, φ0=-0.7°+1.0°, 
Траектория 3 получена для условий: Θ0=1.5°-0.33°, φ0=-0.7°-1.0°, 
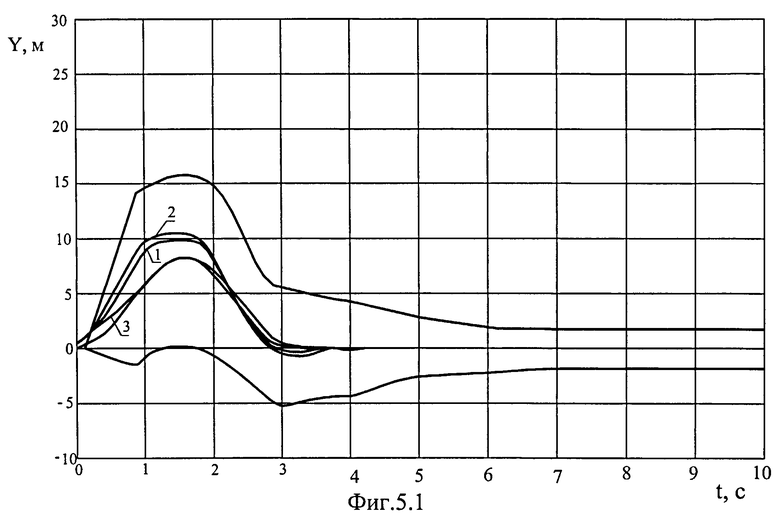
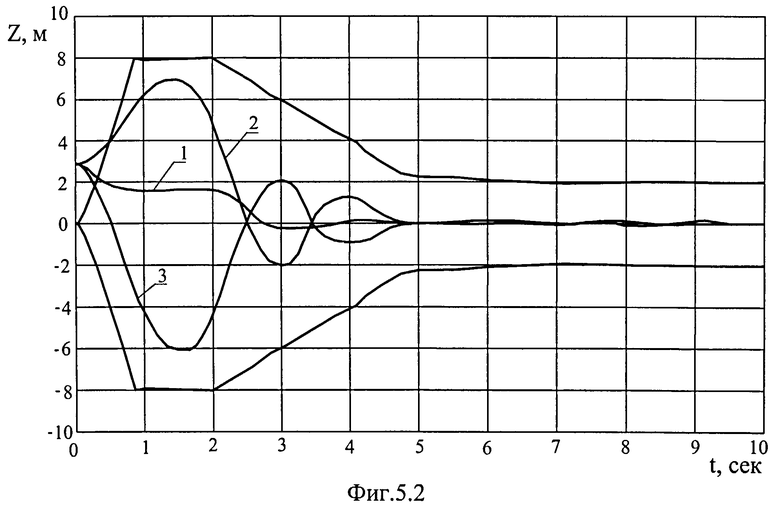
На фиг.5.1 и 5.2 приведены траектории ракеты "Вихрь" соответственно в вертикальной и горизонтальной плоскостях, полученные при ошибках прицеливания летчика в вертикальной плоскости +2.5°, в горизонтальной плоскости ±1.0° для трех траекторий в тех же условиях.
При моделировании рассматривался наиболее тяжелый с точки зрения обеспечения ввода ракеты в ИП случай стрельбы в режиме "висения" вертолета, характеризующийся наибольшим рассеиванием ракет на неуправляемом участке полета.
Анализ результатов математического моделирования показывает, что при реализации предлагаемого способа наведения ракеты "Вихрь", например, с вертолета Ка-52 и ошибках прицеливания летчика до ±2.5°, обеспечивается ввод ракеты в информационное поле луча управления и последующее наведение ее на цель. Предложенный способ позволяет снизить требования к рассеиванию ракет на начальном участке наведения, а также снизить требования к точности прицеливания авиационными носителями, т.е. реализуется возможность производить прицеливание и осуществлять ввод ракеты в информационное поле луча управления без маневра носителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2007 |
|
RU2362106C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ С РАСКРЫВАЕМЫМИ ПОСЛЕ ПУСКА РУЛЯМИ | 2005 |
|
RU2297588C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
| УПРАВЛЯЕМАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2012 |
|
RU2518126C2 |
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| СПОСОБ ОДНОВРЕМЕННОГО НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМЫХ В ЛУЧЕ УПРАВЛЕНИЯ РАКЕТ (ВАРИАНТЫ) И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2479818C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| СПОСОБ УПРАВЛЕНИЯ ПО ЛУЧУ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТОЙ И УПРАВЛЯЕМАЯ ПО ЛУЧУ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 2011 |
|
RU2460966C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
Изобретение относится к области наведения управляемых ракет. Способ наведения по оптическому лучу ракеты, стартующей с подвижного носителя, включает формирование на носителе лазерного луча с информационным полем управления, наведение на цель оптического прицела, ось которого съюстирована с осью информационного поля, ориентирование оси пускового устройства в направлении оси луча, пуск ракеты со сложенными аэродинамическими рулями и ввод ракеты в информационное поле, открытие на ракете приемника излучения и формирование команд управления, зависящих от положения ракеты относительно оси информационного поля, раскрытие аэродинамических рулей и их отклонение. В момент схода ракеты запоминают угловое положение оси пускового устройства относительно связанной с носителем системы координат, а также угловое положение носителя относительно земной системы координат, раскрытие рулей осуществляют с временной задержкой относительно открытия приемника излучения, в момент открытия приемника излучения совмещают ось информационного поля луча с запомненным в момент схода ракеты положением пускового устройства, а в момент времени раскрытия рулей начинают совмещение оси информационного поля лазерного луча с линией визирования цели. Технический результат заключается в повышении точности и уменьшении времени вывода ракеты на ось луча. 1 з.п. ф-лы, 5 ил.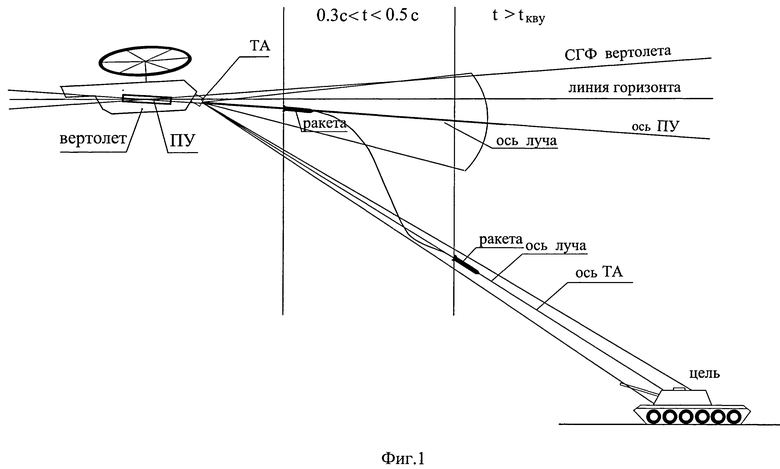
1. Способ наведения по оптическому лучу ракеты, стартующей с подвижного носителя, включающий формирование на носителе лазерного луча с информационным полем управления, наведение на цель оптического прицела, ось которого съюстирована с осью информационного поля лазерного луча, ориентирование оси пускового устройства в направлении оси информационного поля лазерного луча, пуск ракеты со сложенными аэродинамическими рулями и ввод ракеты в информационное поле лазерного луча, открытие на ракете приемника излучения и формирование сигналов, пропорциональных координатам ракеты относительно оси информационного поля лазерного луча, и преобразование их в команды управления, раскрытие аэродинамических рулей, преобразование команд управления в отклонения рулей, отличающийся тем, что в момент схода ракеты на носителе измеряют и запоминают угловое положение оси пускового устройства относительно связанной с носителем системы координат, а также угловое положение носителя относительно земной системы координат, раскрытие рулей осуществляют с временной задержкой относительно открытия приемника излучения, в момент открытия приемника излучения совмещают ось информационного поля лазерного луча с запомненным в момент схода ракеты положением оси пускового устройства, а в момент времени tHB, соответствующий моменту раскрытия рулей, начинают совмещение оси информационного поля лазерного луча с линией визирования цели.
2. Способ по п.1, отличающийся тем, что совмещение оси информационного поля лазерного луча с линией визирования цели осуществляют по закону:

где Δφву,z - текущие углы между осью информационного поля и линией визирования цели,

ωвmу,z - максимальные угловые скорости вращения оси информационного поля в процессе совмещения;




tкву,z - время окончания совмещения,
tквy,z=tнв+Δtву,z,
где Δtву,z=π/ωву,z.
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ С РАСКРЫВАЕМЫМИ ПОСЛЕ ПУСКА РУЛЯМИ | 2005 |
|
RU2297588C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205361C2 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| US 7628353 B2, 08.12.2009 | |||
| СПОСОБ УСТАНОВКИ НАЧАЛЬНЫХ ПАРАМЕТРОВ УПРАВЛЕНИЯ И КОМПЛЕКС АРТИЛЛЕРИЙСКОГО УПРАВЛЯЕМОГО ВООРУЖЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2329459C1 |
| US 7500636 B2, 10.03.2009. | |||

