Изобретение относится к комплексным испытательным устройствам, предназначенным для прогнозирования результатов натурных испытаний беспилотных летательных аппаратов.
Повышение качества и надежности разрабатываемых беспилотных летательных аппаратов (ЛА), а также их систем управления связано с проведением комплексных испытаний. От правильного решения задачи испытаний зависит качество ЛА и другие технико-экономические его показатели. Наибольшей достоверностью обладают результаты натурных испытаний, но возможности их проведения для беспилотных ЛА и получения требуемого объема информации ограничены из-за большой сложности и высокой стоимости проведения натурных испытаний. Вследствие этого необходима тщательная отработка всех систем ЛА на предшествующих этапах их разработки и изготовления. Кроме этого, изменчивость условий проведения натурных испытаний затрудняет обеспечение повторяемости условий эксперимента и получение представительных выборок результатов даже для основных режимов применения ЛА.
Так как основным устройством, обеспечивающим требуемое качество системы управления ЛА, является устройство выработки сигналов управления (или автопилот), то первостепенной задачей является отработка его алгоритмов и исследование влияния настраиваемых параметров на работоспособность всей системы управления. Для достоверного прогнозирования и дополнения натурных результатов комплексная испытательная система оснащается моделями функциональных систем сбора и обработки данных для принятия решений о работоспособности системы управления (СУ) ЛА.
Известна система [1] для проверки работоспособности системы управления ЛА и отработки алгоритмов управления, содержащая имитатор радиосигналов, динамический стенд с установленной на нем аппаратурой управления ЛА (радиолокационный визир, датчики углов и угловых скоростей, рулевые механизмы), имитатор углового движения объекта наблюдения и вычислители. Сигнал с имитатора радиосигналов поступает в антенну, установленную в носовой части радиолокационного визира. Перемещение рупора имитатора моделирует угловое перемещение объекта наблюдения. Динамический стенд с установленными приборами получает сигналы с выходов вычислителя, в котором по начальному значению дальности и скоростям объекта наблюдения и летательного аппарата ЛА вычисляется текущая дальность.
Недостатком известной системы является сложность отработки алгоритмов устройством выработки сигналов управления ЛА, обусловленная использованием в системе как имитаторов, так и реальной аппаратуры системы управления ЛА и, как следствие, невысокая точность. Кроме того, система не обеспечивает высокой достоверности прогнозирования результатов натурных испытаний ЛА вследствие отсутствия специальных устройств обработки и обобщения результатов испытаний (т. к. единичный эксперимент никогда не может быть решающим для проверки СУ ЛА).
Наиболее близким по технической сущности аналогом, принятым в качестве прототипа предлагаемого изобретения, является система [2] для прогнозирования результатов натурных испытаний беспилотного летательного аппарата, которая содержит имитатор летательного аппарата, имитатор радиовысотомера, первый динамический стенд, на платформе которого установлены измерители углов, радиолокационный визир, установленный на платформе второго динамического стенда и связанный по радиоканалу с имитатором углового движения объекта наблюдения, имитатор радиосигналов, первый и второй имитаторы упругости, датчики угловых скоростей, измеритель ускорений, устройство выработки сигналов управления, имитатор пункта управления и рулевые механизмы. В имитаторе ЛА по исходным данным вырабатываются сигналы о положении ЛА и объекта наблюдения в пространстве, их относительных скоростях движения. В соответствии с получаемым сигналом дальности между ЛА и объектом наблюдения имитатор радиосигнала вырабатывает сигнал, эквивалентный отраженному от объекта наблюдения. Этот сигнал поступает в антенну радиолокационного визира, в котором вырабатываются сигналы измеренных углов азимута и места цели объекта наблюдения, которые вместе с сигналами, получаемыми на выходах датчиков угловых скоростей, измерителей углов, линейных ускорений и имитатора радиовысотомера, поступают в устройство выработки сигналов управления. В устройстве выработки сигналов управления вырабатываются сигналы управления силовыми приводами рулевых механизмов ЛА. Происходит отклонение исполнительного элемента рулевого механизма, и сигнал, снимаемый с его выхода, пропорциональный углу закладки соответствующего руля, поступает на вход имитатора летательного аппарата, замыкая контур управления исследуемой СУ. Система останавливается оператором через расчетное заранее время, соответствующее встрече ЛА и объекта наблюдения, и в момент остановки фиксируется величина промаха в вертикальной и боковой плоскостях, по которым делаются выводы о качестве СУ ЛА.
В системе по прототипу за счет отказа от воспроизведения несущественных зависимостей в моделях кинематики и динамики процессов наведения ЛА на объект наблюдения предельно упрощаются кинематические схемы имитаторов движения ЛА и относительного углового движения объекта наблюдения, исключаются ошибки имитаторов внешней среды, что позволяет достичь высокой точности воспроизведения процессов функционирования СУ ЛА и, соответственно, высокой достоверности результатов испытаний в лабораторных условиях.
Недостатком системы по прототипу является избыточная сложность при использовании ее для отработки алгоритмов устройства выработки сигналов управления ЛА, а также отсутствие определенной статистической обработки результатов испытаний с целью исключения неопределенности. Кроме того, практически очень трудно заранее определить точно время встречи ЛА и объекта наблюдения, что становится дополнительным источником ошибок при фиксации результатов испытаний и, следовательно, прогноза натурных испытаний.
Задачей изобретения является упрощение системы для прогнозирования результатов натурных испытаний и повышение достоверности оценки качества аппаратуры системы управления летательного аппарата за счет получения при наземных испытаниях более полного объема данных и более наглядного их представления.
Известно, что основными критериями оценки качества аппаратуры СУ ЛА являются точность наведения ЛА на объект наблюдения и вероятность попадания, которые количественно можно оценить по величине промаха или пролета. Величина пролета зависит от многих случайных факторов, характеризующих работу СУ ЛА. Поэтому оценку динамической точности производят статистическими методами, обрабатывая результаты достаточно большого количества "электронных пусков" при одинаковых кинематических начальных условиях. В результате получают статистические оценки динамической точности СУ ЛА.
В предлагаемой системе осуществляются испытания ЛА с воспроизведением моделей процессов взаимодействия внешней среды и элементов СУ, что обеспечивает функционирование основного управляющего прибора аппаратуры ЛА - устройства выработки сигналов управления - в условиях, максимально приближенных к реальным. Оценка точности СУ ЛА осуществляется по величинам бокового и вертикального пролета ЛА объекта наблюдения, которые фиксируются в момент, когда дальность между ЛА и объектом наблюдения равна нулю. Объем испытаний (выборок) определяется исходя из принятых значений доверительной вероятности встречи и требуемой точности точечных и интервальных оценок.
Сущность изобретения заключается в том, что в систему для прогнозирования результатов натурных испытаний беспилотного летательного аппарата, содержащую имитатор летательного аппарата, имитатор радиовысотомера, имитатор пункта управления, включающий пульт управления, и подключенное к выходу сигнала запуска пульта управления устройство управления испытаниями, а также устройство выработки сигналов управления, входы сигналов программных параметров которого подключены к соответствующим выходам пульта управления, а вход сигнала запуска объединен с входами сигнала запуска имитатора радиовысотомера и имитатора летательного аппарата и подключен к выходу устройства управления испытаниями, выход сигнала высоты полета имитатора летательного аппарата подключен к сигнальному входу имитатора радиовысотомера, а выход сигнала настройки системы пульта управления подключен к соответствующему входу имитатора летательного аппарата, дополнительно введены имитатор датчиков угловых скоростей, имитатор измерителя углов, имитатор измерителя линейных ускорений, имитатор рулевых механизмов, имитатор ветровых порывов, имитатор подстилающей поверхности и имитатор измерителя координат объекта наблюдения, входы сигнала запуска которых объединены и подключены к выходу устройства управления испытаниями, а также задатчик параметров объекта наблюдения, блок контроля пролета и устройство обработки результатов испытаний, содержащее переключатель, блок памяти, блок фиксации реализаций, вычислитель оценок точности и вычислитель вероятности встречи, при этом выходы сигналов угловых скоростей по курсу, крену и тангажу имитатора летательного аппарата подключены к соответствующим входам имитатора датчиков угловых скоростей, выходы сигналов углов курса, крена и тангажа подключены к соответствующим входам имитатора измерителя углов, а выходы сигналов линейных ускорений - к соответствующим входам имитатора измерителя линейных ускорений, выходы которого, а также выходы имитатора измерителя углов и имитатора датчиков угловых скоростей подключены к соответствующим входам устройства выработки сигналов управления, выходы сигналов скорости полета и угла наклона траектории имитатора летательного аппарата подключены к соответствующим входам имитатора измерителя координат объекта наблюдения, выходы сигналов углов визирования объекта наблюдения которого подключены к соответствующим входам устройства выработки сигналов управления, выходы сигналов управления рулями высоты, направления и элеронами которого подключены к входам имитатора рулевых механизмов, а вход сигнала высоты полета - к выходу имитатора радиовысотомера, вход сигнала подстилающей поверхности которого подключен к выходу имитатора подстилающей поверхности, выходы сигналов углов закладки рулей направления, высоты и элеронов имитатора рулевых механизмов подключены к соответствующим входам имитатора летательного аппарата, вход сигнала имитации ветровых порывов которого подключен к выходу имитатора ветровых порывов, выход сигнала настройки системы пульта управления соединен с соответствующими входами переключателя, вычислителя оценок точности, имитатора рулевых механизмов и имитатора измерителя координат объекта наблюдения, входы сигналов начальной установки которого подключены к соответствующим выходам пульта управления, выход сигнала текущей дальности - к входу блока контроля пролета, а входы сигналов высоты полета и бокового отклонения летательного аппарата объединены с соответствующими входами переключателя и подключены к соответствующим выходам имитатора летательного аппарата, выход переключателя соединен со входом индикатора и информационным входом блока памяти, управляющий вход которого объединен с управляющими входами блока фиксации реализаций и устройства управления испытаниями и подключен к выходу блока контроля пролета, выход блока фиксации реализаций подключен ко входам сигнала нулевой дальности вычислителя оценок точности и вычислителя вероятности встречи, входы сигнала пролета которых подключены к выходу блока памяти, выход сигнала числа реализаций задатчика параметров объекта наблюдения подключен к соответствующим входам устройства управления испытаниями, блока фиксации реализаций, вычислителя оценок точности и вычислителя вероятности встречи, входы сигналов размеров объекта наблюдения которого подключены к соответствующим выходам задатчика параметров объекта наблюдения, выход сигнала высоты радиолокационного центра отражения объекта наблюдения которого подключен к соответствующему входу вычислителя оценок точности, выходы которого и выход вычислителя вероятности встречи являются выходами системы.
Благодаря введению в предлагаемую систему имитаторов аппаратуры системы управления ЛА (имитатор измерителя координат объекта наблюдения, имитатор датчиков угловых скоростей, имитатор линейных ускорений и имитатор измерителя углов), имитаторов внешних возмущений (имитатор ветровых порывов и имитатор подстилающей поверхности), а также дополнительных блоков обработки и управления испытаниями (индикатор, задатчик параметров объекта наблюдения, блок контроля пролета и устройств обработки результатов испытаний) обеспечивается существенное упрощение системы для прогнозирования результатов натурных испытаний. При этом осуществляется более точная и надежная фиксация результатов единичного испытания СУ ЛА (величины промаха при встрече ЛА и объекта наблюдения), а статистическая обработка серии испытаний при идентичных начальных условиях позволяет оценить математическое ожидание и дисперсию промаха, а также вероятность встречи ЛА и объекта наблюдения, по результатам раздельных испытаний в вертикальной и горизонтальной плоскостях при воздействии различных нестабильных факторов (таких, как ветер и подстилающая поверхность), что особенно актуально при исследовании режимов полета ЛА на малой высоте).
Предлагаемая система обеспечивает повышение эффективности наземных испытаний за счет увеличения достоверности результатов исследований аппаратуры ЛА. Это новое качество определяется как новой структурой системы, так и процессами взаимодействия элементов, воспроизводящих влияние внешней среды, а также способом фиксации и обработки результатов.
Сущность изобретения поясняется дальнейшим описанием и чертежами, на которых представлены:
фиг. 1 - структурная схема системы;
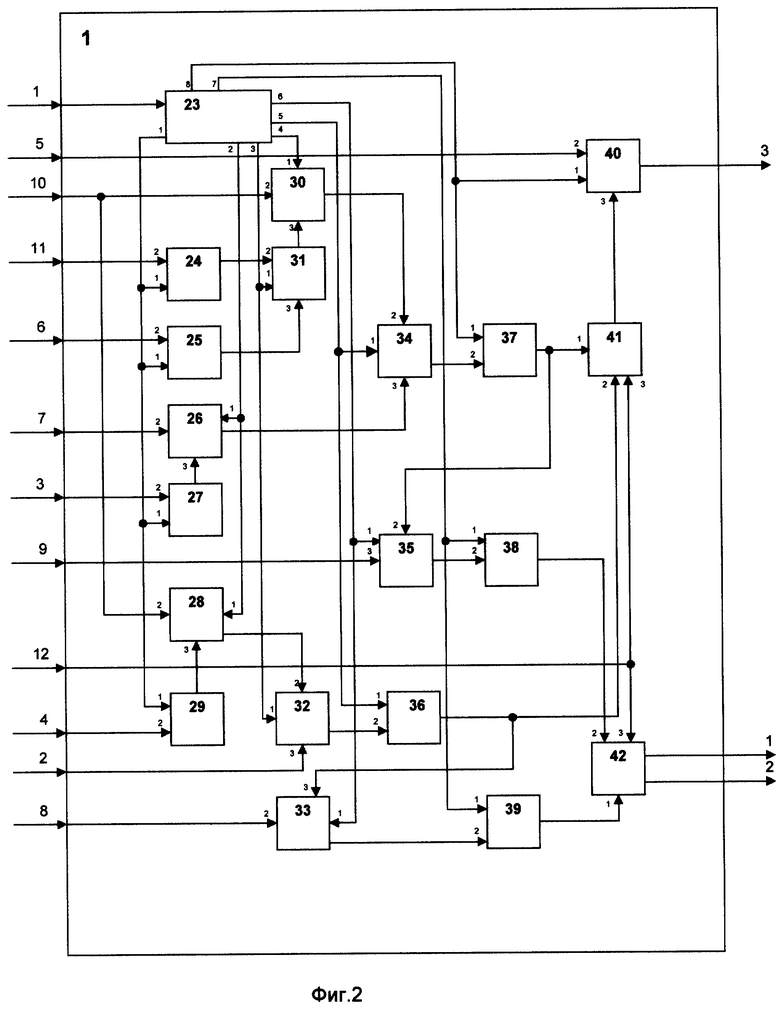
фиг. 2 - структурная схема имитатора измерителя координат объекта наблюдения;
фиг. 3 - структурная схема имитатора летательного аппарата;
фиг. 4 - структурная схема устройства моделирования бокового движения ЛА;
фиг. 5 - структурная схема устройства моделирования продольного движения ЛА;
фиг. 6 - структурная схема вычислителя оценок точности;
фиг. 7 - структурная схема вычислителя вероятности встречи;
фиг. 8 - структурная схема устройства управления испытаниями;
фиг. 9 - структурная схема пульта управления;
фиг. 10 - структурная схема имитатора рулевых механизмов;
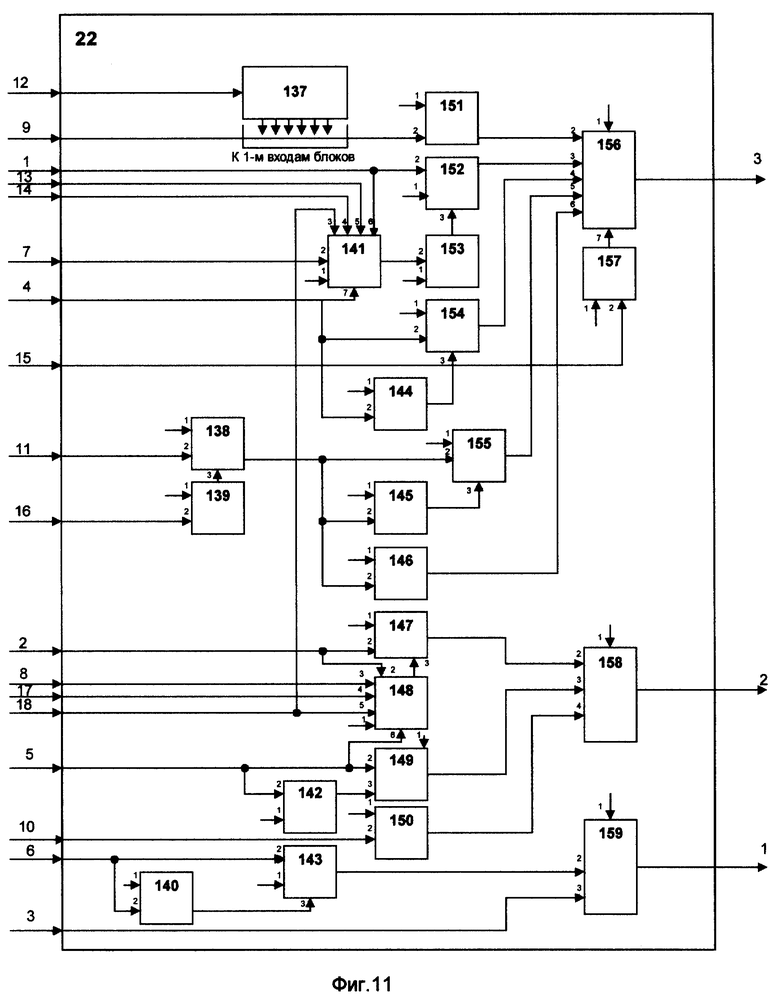
фиг. 11 - структурная схема устройства выработки сигналов управления.
На фиг. 1 обозначены:
1 - имитатор измерителя координат объекта наблюдения;
2 - имитатор летательного аппарата;
3 - блок контроля пролета;
4 - устройство обработки результатов испытаний;
5 - переключатель;
6 - блок фиксации реализаций;
7 - вычислитель оценок точности;
8 - блок памяти;
9 - вычислитель вероятности встречи;
10 - задатчик параметров объекта наблюдения;
11 - имитатор пункта управления;
12 - устройство управления испытаниями;
13 - пульт управления;
14 - имитатор датчиков угловых скоростей;
15 - имитатор измерителя углов;
16 - имитатор измерителя линейных ускорений;
17 - имитатор ветровых порывов;
18 - имитатор радиовысотомера;
19 - имитатор подстилающей поверхности;
20 - индикатор;
21 - имитатор рулевых механизмов;
22 - устройство выработки сигналов управления.
Согласно фиг. 1 третий выход имитатора 1 измерителя координат объекта наблюдения (сигнала текущей дальности - D) соединен с входом блока 3 контроля пролета, первый и второй выходы (выходы сигналов Ψa,υa углов визирования объекта наблюдения) подключены к соответствующим входам (7-й и 8-й входы) устройства 22 выработки сигналов управления, входы с второго по седьмой (входы сигналов начальной установки имитатора 1) подключены соответственно к выходам с третьего по восьмой пульта 13 управления, а входы сигнала скорости полета - V (10-й вход), сигнала угла наклона траектории - θ (11-й вход), сигнала высоты полета в нормальной земной системе координат - Yg (8-й вход) и сигнала бокового отклонения в нормальной земной системе координат - zg (9-й вход) подключены соответственно к 7-му, 8-му, 9-му и 10-му выходам имитатора 2 ЛА.
Выходы имитатора 2 летательного аппарата по сигналам скоростей изменения углов курса - ωx , крена - ωy, тангажа - ωz (1-й, 2-й, 3-й выходы) через имитатор 14 датчиков угловых скоростей подключены соответственно ко входам с четвертого по шестой устройства 22 выработки сигналов управления, выходы по сигналам углов курса - Ψ, крена - γ и тангажа - ν (4-й, 6-й и 5-й выходы) подключены через имитатор 15 измерителя углов соответственно ко входам с первого по третий устройства 22 выработки сигналов управления, выходы по сигналам линейных ускорений - aY, az, через имитатор 16 измерителей линейных ускорений соединены с девятым и десятым входами устройства 22 выработки сигналов управления, выход по сигналу высоты полета ЛА в нормальной земной системе координат - Yg (10-й выход) подключен через имитатор 18 радиовысотомера к одиннадцатому входу устройства 22 выработки сигналов управления, который является входом сигнала высоты полета - Н.
Шестой вход имитатора 2 ЛА подключен к выходу имитатора 17 ветровых порывов, управляющий вход (сигнала запуска) которого объединен с управляющими входами сигнала запуска имитатора 19 подстилающей поверхности, имитатора 18 радиовысотомера (2-й вход), имитатора 15 измерителей углов (4-й вход), имитатора 14 датчиков угловых скоростей (4-й вход), имитатора 16 измерителей линейных ускорений (3-й вход), имитатора 1 измерителя координат объекта наблюдения (1-й вход), имитатора 2 ЛА (1-й вход), имитатора 21 рулевых механизмов (5-й вход) и устройства 22 выработки сигналов управления (12-й вход) и подключен к выходу устройства 12 управления испытаниями, вход запуска которого, в свою очередь, подключен ко второму выходу пульта 13 управления, входящего вместе с устройством 12 управления испытаниями в состав имитатора 11 пункта управления.
Выходы с девятого по четырнадцатый пульта 13 управления (выходы сигналов программных параметров движения ЛА) подключены к соответствующим входам с тринадцатого по восемнадцатый устройства 22 выработки сигналов управления.
Выходы сигналов управления рулями высоты σв , направления σн и элеронами σэ устройства 22 выработки сигналов управления через имитатор 21 рулевых механизмов подключены к соответствующим входам имитатора 2 ЛА по сигналам углов закладки рулей высоты - δв , направления - δи и элеронов δэ (3-му, 4-му и 5-му входам).
2-й вход имитатора 2 ЛА, 12-й вход имитатора 1 измерителя координат объекта наблюдения, 3-й вход переключателя 5, 4-й вход имитатора 21 рулевых механизмов и 5-й вход вычислителя 7 оценок точности подключены к первому выходу пульта 13 управления, который является выходом сигнала настройки системы пульта 13 управления и имитатора 11 пункта управления.
9-й выход имитатора 2 летательного аппарата (сигнала бокового отклонения ЛА в нормальной земной системе координат - zg) и 10-й выход (сигнала высоты полета в нормальной земной системе координат - Yg) подключены к первому и второму входам переключателя 5, входящего вместе с блоком 6 фиксации реализаций, вычислителем 7 оценок точности, блоком 8 памяти и вычислителем 9 вероятности встречи в состав устройства 4 обработки результатов испытаний.
Выход переключателя 5 подключен к информационным входам индикатора 20 и блока 8 памяти, управляющий (1-й) вход которого объединен с первым входом блока 6 фиксации реализаций, третьим входом устройства 12 управления испытаниями и подключен к выходу блока 3 контроля пролета. Второй управляющий вход блока 6 фиксации реализаций соединен с третьими входами вычислителей 7 и 9, вторым входом устройства 12 управления испытаниями и подключен к третьему выходу (сигнала задания количества реализаций) задатчика 10 параметров объекта наблюдения. Выходы задатчика 10 параметров объекта наблюдения по сигналам размеров объекта наблюдения (1-й, 2-й и 3-й выходы) подключены к четвертому- шестому входам вычислителя 9 вероятности встречи, а выход по сигналу высоты радиолокационного центра отражения объекта наблюдения (4-й выход) - к четвертому входу вычислителя 7 оценок точности. Первые входы (сигналов нулевой дальности) обоих вычислителей 7 и 9 объединены и подключены к выходу блока 6 фиксации реализаций, вторые их входы (сигналов пролета) также объединены и подключены к выходу блока 8 памяти. На выходах вычислителя 7 оценок точности формируются сигналы оценок точности СУ ЛА - математическое ожидание величины промаха, дисперсия промаха и среднее квадратическое отклонение, а на выходе вычислителя 9 - вероятность попадания в объект наблюдения заданных размеров.
Имитатор 1 измерителя координат объекта наблюдения предназначен для имитации выработки сигналов углов визирования объекта наблюдения относительно строительной оси ЛА - υA - измеренный угол места, ΨA - измеренный угол азимута, которые вырабатываются в радиолокационном визире системы управления ЛА.
Алгоритм работы имитатора 1 измерителя координат объекта наблюдения описывается известной системой уравнений [3, 4, 6]:
для задачи " бокового движения"
для задачи "продольного движения"
где D - текущее расстояние до объекта наблюдения; V - скорость полета; zg и Yg - координаты ЛА (боковое отклонение и высота полета) в нормальной земной системе координат; θ - угол наклона траектории; VD, Vц, qв и qц - задаваемые параметры движения объекта наблюдения; q - курсовой угол объекта наблюдения; Ψa= ϕц= q+ϕ и υa= εц= θ+qв - угловые отклонения объекта наблюдения; ϕ - угол пути, определяющий направление путевой скорости ЛА.
Структурная схема имитатора 1 измерителя координат объекта наблюдения, реализующего указанный алгоритм, представлена на фиг. 2, где обозначено: 23 - таймер; 24, 25 - функциональные блоки; 26 - умножитель; 27 - функциональный блок; 28 - умножитель; 29 - функциональный блок; 30, 31 - умножители; 32 - сумматор; 33 - делитель; 34 - сумматор; 35 - делитель; 36 - интегратор; 37 - интегратор; 38 - функциональный блок; 39 - функциональный блок; 40 - блок памяти; 41, 42 - переключатели.
Выходы таймера 23 подключены к первым входам всех вычислительных блоков имитатора 1 измерителя координат объекта наблюдения, а именно: первый выход - ко входам функциональных блоков 24, 25, 27, 29, второй - ко входам умножителей 26 и 28, третий - ко входу умножителя 31 и сумматора 32, четвертый - ко входу умножителя 30, пятый - ко входам сумматора 34 и интегратора 36, шестой - ко входам делителей 35 и 33, седьмой - ко входам функциональных блоков 38 и 39, а восьмой - к 1-м входам интегратора 37 и блока 40 памяти.
Вход таймера является первым входом имитатора 1 измерителя координат объекта наблюдения, пятый вход которого подключен ко второму входу блока 40 памяти, выход которого является третьим выходом имитатора 1 измерителя координат объекта наблюдения (сигнал текущей дальности - D).
Третий вход блока 40 памяти подключен к выходу переключателя 41, третий вход которого объединен с третьим входом переключателя 42 и подключен к двенадцатому входу имитатора 1. Второй вход переключателя 41 и третий вход делителя 33 подключены к выходу интегратора 36, первый вход переключателя 41 соединен с выходом интегратора 37 и вторым входом делителя 35, выход которого через функциональный блок 38 подключен ко второму входу переключателя 42.
Выходы переключателя 42 являются первым и вторым выходами имитатора 1 (выходы сигналов Ψa,υa углов визирования объекта наблюдения), а первый вход через последовательно соединенные функциональный блок 39 и делитель 33 подключен к восьмому входу имитатора 1.
Второй вход имитатора 1 подключен к третьему входу сумматора 32, выход которого подключен ко второму входу интегратора 36, а второй вход - к выходу умножителя 28. Третий вход умножителя 28 через функциональный блок 29 подключен к четвертому входу имитатора 1, а второй вход объединен со вторым входом умножителя 30 и подключен к десятому входу имитатора 1. Выход умножителя 30 через сумматор 34 подключен ко второму входу интегратора 37, третий вход - к выходу умножителя 31, второй вход которого через функциональный блок 24 подключен к одиннадцатому входу имитатора 1, а третий вход через функциональный блок 25 подключен к шестому входу имитатора 1.
Седьмой вход имитатора 1 измерителя координат объекта наблюдения через умножитель 26 подключен к третьему входу сумматора 34, третий вход через функциональный блок 27 подключен к третьему входу умножителя 26, а девятый вход - к третьему входу делителя 35.
Имитатор 2 летательного аппарата предназначен для выработки информации о моделируемом положении ЛА в пространстве, его углах атаки и скольжения, угловых и линейных скоростях. Известно [3, 4], что для большинства беспилотных ЛА, система дифференциальных уравнений, описывающих возмущенное движение, распадается на две независимые группы уравнений, одна из которых описывает изменение параметров продольного движения, а другая - бокового движения. Эта особенность учитывается как при построении имитатора ЛА, так и устройства в целом, что позволяет существенно повысить достоверность испытаний. При этом возникает возможность проведения независимых испытаний каналов управления ЛА в боковой и продольной плоскостях.
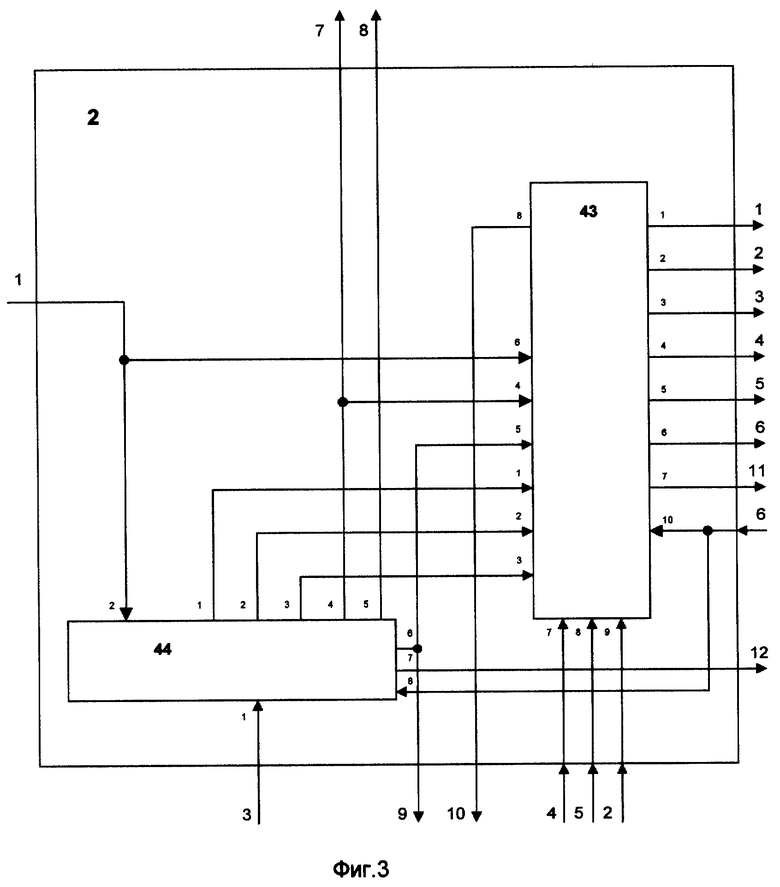
Согласно фиг. 3 имитатор 2 летательного аппарата содержит устройство 43 моделирования бокового движения ЛА и устройство 44 моделирования продольного движения ЛА, первый вход которого по сигналу закладки руля высоты δв является третьим входом имитатора 2 ЛА, второй вход (сигнала запуска) является первым входом имитатора 2 ЛА и подключен к шестому входу устройства 43 моделирования бокового движения ЛА. Четвертый, пятый и шестой выходы устройства 44 моделирования продольного движения ЛА по сигналам скорости полета - V, угла наклона траектории - θ, высоте полета в нормальной земной системе координат - Yg являются 7-м, 8-м и 10-м выходами имитатора 2 ЛА.
Восьмой выход устройства 43 моделирования бокового движения ЛА по сигналу бокового отклонения в нормальной земной системе координат - zg является также девятым выходом имитатора 2 ЛА. Входы устройства 43 по сигналам угла атаки - α , скорости изменения угла тангажа - ωz и угла тангажа - υ и (1-й, 2-й и 3-й входы) подключены соответственно к выходам с первого по третий устройства 44, а входы по сигналам V и Yg - к четвертому и шестому выходам устройства 44, соответственно.
Выходы устройства 43 по сигналам скоростей изменения углов курса - ωx , крена - ωy , тангажа - ωz (1-й, 2-й, 3-й выходы) являются первым, вторым и третьим выходами имитатора 2 ЛА соответственно. Четвертый, пятый и шестой выходы устройства 43 моделирования бокового движения ЛА по сигналам углов курса - Ψ , крена - γ и тангажа - υ являются четвертым, шестым и пятым выходами имитатора 2 ЛА. 11-й и 12-й выходы имитатора 2 ЛА по сигналам линейных ускорений az, ay в нормальной земной системе координат являются шестым выходом устройства 43 моделирования бокового движения ЛА и седьмым выходом устройства 44 моделирования продольного движения ЛА соответственно.
Четвертый и пятый выходы имитатора 2 ЛА по сигналам закладки рулей направления - δн и элеронов δэ подключены к 7-му и 8-му входам устройства 43 моделирования бокового движения ЛА соответственно. Второй вход имитатора 2 ЛА по сигналу настройки системы подключен к девятому входу устройства 43 моделирования бокового движения ЛА. Шестой вход имитатора 2 ЛА по сигналу управления ветровыми воздействиями подключен к десятому входу устройства 43 моделирования бокового движения ЛА и восьмому входу устройства 44 моделирования продольного движения ЛА.
Алгоритм работы устройства 43 моделирования бокового движения летательного аппарата описывается следующей системой уравнений:



ΔJ= JxJy-J

ϕ = Ψ-β, (2.11)
где 1 - характерный размер; Ψ,γ,υ - углы курса, крена и тангажа ЛА; m
ρ = ρ(Yg,T(Yg)),
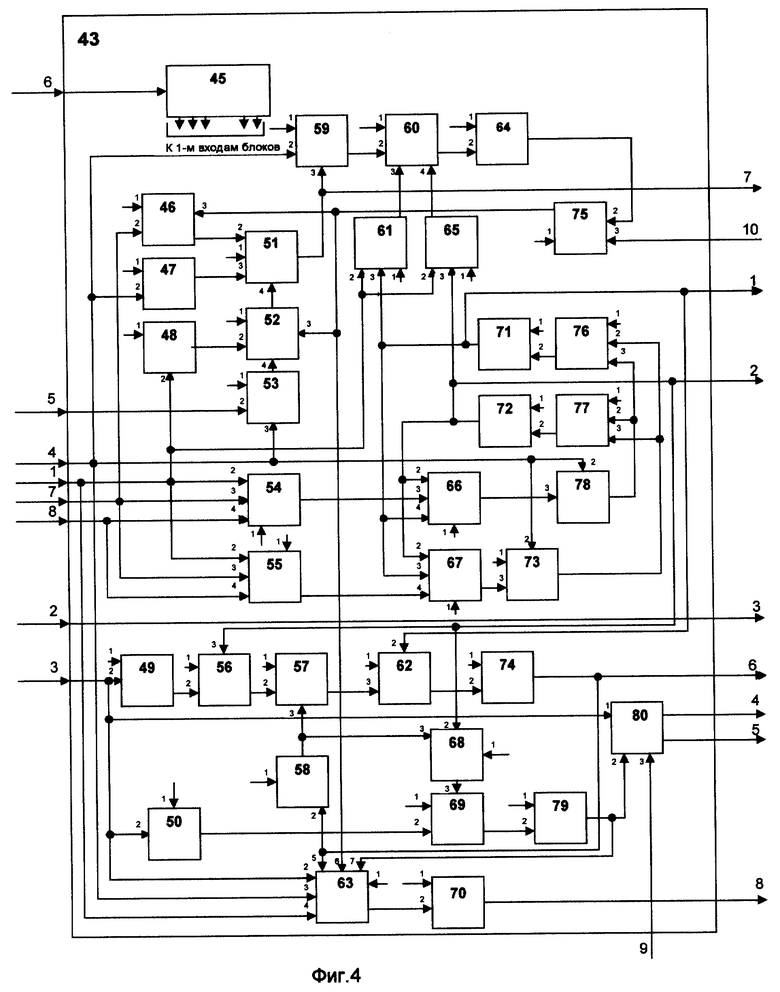
На фиг. 4, представляющей структурную схему устройства 43, приняты следующие обозначения: 45 - таймер; 46, 47, 48, 49, 50, 51, 52, 53, 54, 55 - функциональные блоки; 56 - умножитель; 57 - сумматор; 58 - функциональный блок; 59 - умножитель; 60 - сумматор; 61 - функциональный блок; 62 - сумматор; 63 - функциональный блок; 64 - интегратор; 65 - функциональный блок; 66-67 - сумматоры; 68, 69 - умножители; 70, 71, 72 - интеграторы; 73 - умножитель; 74 - интегратор; 75 - функциональный блок; 76, 77 - сумматоры; 78 - умножитель; 79 - интегратор; 80 - переключатель.
Выходы таймера 45 подключены к первым входам всех вычислительных блоков устройства 43, как показано на фиг. 4, а вход таймера 45 является шестым входом (сигнала запуска) устройства 43. Пятый вход устройства 43 моделирования бокового движения ЛА подключен ко второму входу функционального блока 53, третий вход которого подключен ко вторым входам умножителей 59, 73 и 78, второму входу функционального блока 47, третьему входу функционального блока 63 и четвертому входу устройства 43.
Выход блока 53 подключен к четвертому входу функционального блока 52, второй вход которого подключен к выходу функционального блока 48, третий вход, объединенный с третьим входом функционального блока 46 и шестым входом функционального блока 63, подключен к выходу функционального блока 75, а выход подключен к четвертому входу функционального блока 51. Второй и третий входы функционального блока 51 подключены к выходам функциональных блоков 46 и 47 соответственно, а выход - к седьмому выходу устройства 43 и третьему входу умножителя 59.
Выход умножителя 59 подключен ко второму входу сумматора 60, выход которого подключен через интегратор 64 ко второму входу функционального блока 75, третий и четвертый входы - к выходам функциональных блоков 61 и 65, соответственно, вторые входы которых объединены с вторыми входами функциональных блоков 48, 54 и 55, четвертым входом функционального блока 63 и подключены к первому входу устройства 43 моделирования бокового движения ЛА.
Седьмой вход устройства 43 подключен ко второму входу функционального блока 46 и третьим входам функциональных блоков 54 и 55, четвертые входы которых объединены и подключены к восьмому входу устройства 43.
Первый выход устройства 43 подключен к выходу интегратора 71, который соединен также с третьими входами функционального блока 61 и сумматора 67, четвертым входом сумматора 66 и вторым входом сумматора 62, выход которого через интегратор 74 подключен к шестому выходу устройства 43 моделирования бокового движения ЛА, пятому входу функционального блока 63 и второму входу функционального блока 58.
Третий вход сумматора 62 подключен к выходу сумматора 57, третий вход которого подключен к выходу функционального блока 58 и третьему входу умножителя 68, а второй вход - к выходу умножителя 56, третий вход которого объединен со вторым входом умножителя 68, третьим входом функционального блока 65, вторыми входами сумматоров 66 и 67 и подключен к выходу интегратора 72, который служит вторым выходом устройства 43.
Третий выход устройства 43 подключен к его второму входу, а третий вход через последовательно соединенные функциональный блок 49, умножитель 56 и сумматор 57 подключен к третьему входу сумматора 62, а также непосредственно подключен к первому входу переключателя 80, второму входу функционального блока 63 и второму входу функционального блока 50, выход которого подключен к второму входу умножителя 69.
Третий вход умножителя 69 подключен к выходу умножителя 68, а выход - ко второму входу интегратора 79, выход которого подключен ко второму входу переключателя 80 и седьмому входу функционального блока 63, выход которого через интегратор 70 подключен к восьмому выходу устройства 43.
Девятый вход (сигнала настройки системы) устройства 43 подключен к третьему входу переключателя 80, выходы которого являются четвертым и пятым выходами устройства 43. Второй вход интегратора 72 подключен к выходу сумматора 77, второй вход которого через последовательно соединенные умножитель 78 и сумматор 66 соединен с выходом функционального блока 54, а также подключен и к третьему входу сумматора 76, выход которого подключен к второму входу интегратора 71. Второй вход сумматора 76 соединен с третьим входом сумматора 77 и через последовательно соединенные умножитель 73 и сумматор 67 подключен к выходу функционального блока 55. Дясятый вход (сигнала ветрового порыва) устройства 43 соединен с третьим входом функционального блока 75.
Алгоритм работы устройства 44 моделирования продольного движения летательного аппарата может быть описан следующей системой уравнений:


Cxa=Cxa(M, Cya), (3.6)
H=Yg-Yм, (3.10)
α = υ-θ+αw, (3.11)
где αw - - составляющая угла атаки от вертикальных порывов ветра; ax и ay - ускорения; Cxa, Cya, mz - аэродинамические характеристики ЛА; g - ускорение свободного падения; Jz - момент инерции ЛА; H - высота, измеряемая радиовысотомером; Yм - текущая высота подстилающей поверхности под ЛА.
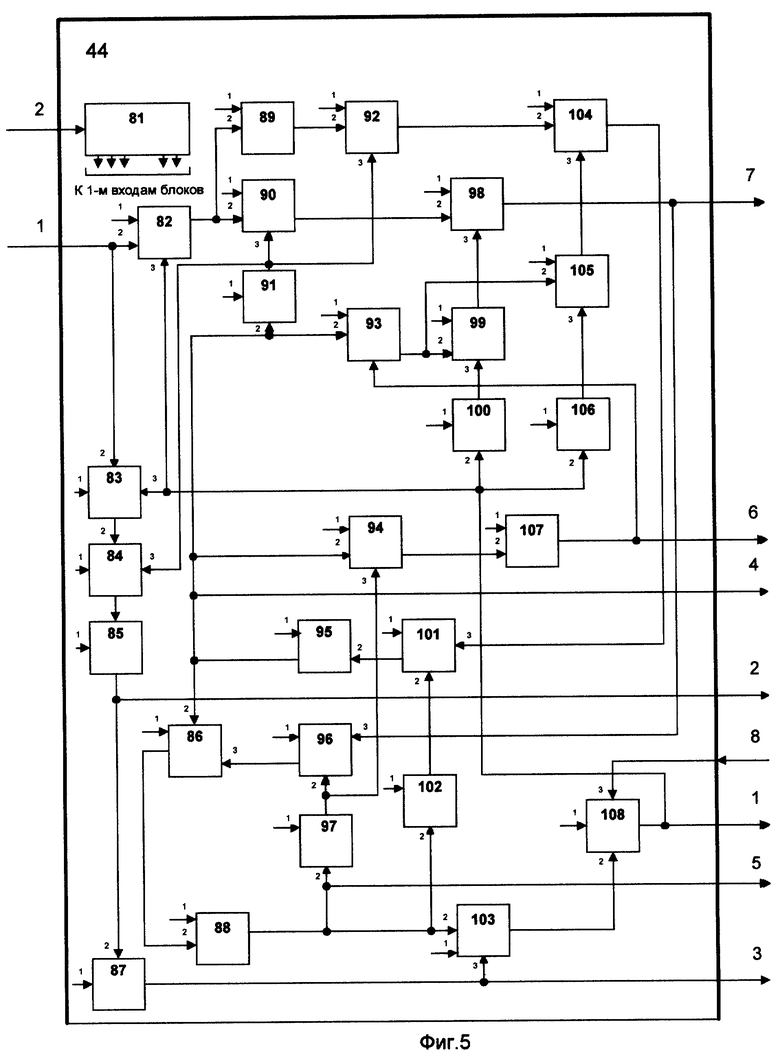
На фиг. 5, представляющей структурную схему устройства 44 моделирования продольного движения ЛА, приняты следующие обозначения: 81 - таймер; 82, 83 - функциональные блоки; 84 - умножитель; 85 - интегратор, 86 - умножитель; 87, 88 - интеграторы; 89 - функциональный блок; 90 - умножитель; 91 - квадратор; 92 - умножитель; 93 - функциональный блок; 94 - умножитель; 95 - интегратор; 96 - функциональный блок; 97 - функциональный блок; 98 - сумматор; 99 - умножитель; 100 - функциональный блок; 101 - сумматор; 102 - функциональный блок; 103, 104 - сумматоры; 105 - умножитель; 106 - функциональный блок; 107 - интегратор; 108 - функциональный блок.
Согласно фиг. 5 вход таймера 81 является вторым входом (сигнала запуска) устройства 44, а его выходы являются первыми входами всех вычислительных блоков устройства 44. Первый вход устройства 44 подключен ко вторым входам функциональных блоков 82, 83. Выход функционального блока 82 через последовательно соединенные функциональный блок 89, умножитель 92 и сумматор 104 подключен к третьему входу сумматора 101, а через последовательно соединенные умножитель 90 и сумматор 98 подключен также к седьмому выходу устройства 44 моделирования продольного движения ЛА, который также соединен с третьим входом функционального блока 96.
Третий вход сумматора 98 подключен к выходу умножителя 99. Второй вход умножителя 99 подключен к выходу функционального блока 93, который через умножитель 105 соединен также с третьим входом сумматора 104, а третий вход подключен к выходу функционального блока 100. Второй вход функционального блока 100 соединен с третьими входами функциональных блоков 82, 83 и вторым входом функционального блока 106 и подключен к выходу функционального блока 108, который является первым выходом устройства 44.
Выход функционального блока 106 подключен к третьему входу умножителя 105. Второй вход умножителя 105 подключен к выходу функционального блока 93, второй вход которого соединен со вторыми входами квадратора 91, умножителей 94 и 86 и подключен к выходу интегратора 95, который служит четвертым выходом устройства 44 моделирования продольного движения ЛА.
Шестой выход устройства 44 соединен с выходом интегратора 107, который соединен также с третьим входом функционального блока 93, а второй вход интегратора 107 соединен с выходом умножителя 94, третий вход которого соединен со вторым входом функционального блока 96 и подключен к выходу функционального блока 97, второй вход которого соединен со вторыми входами сумматора 103 и функционального блока 102 и подключен к выходу интегратора 88, который служит пятым выходом устройства 44.
Выход сумматора 103 подключен ко второму входу функционального блока 108, третий вход которого служит восьмым входом устройства 44. Выход функционального блока 102 подключен ко второму входу сумматора 101, выход которого через интегратор 95 подключен ко второму входу умножителя 86, а выход умножителя 86 соединен со вторым входом интегратора 88.
Третий выход устройства 44 соединен с выходом интегратора 87, к которому подключен также третий вход функционального блока 108, а второй вход интегратора 87 соединен с выходом интегратора 85, который служит вторым выходом устройства 44. Второй вход интегратора 85 подключен к выходу умножителя 84, третий вход которого соединен с третьими входами умножителей 90 и 92 и выходом квадратора 91. Второй вход умножителя 84 подключен к выходу функционального блока 83. Третий вход умножителя 86 подключен к выходу функционального блока 96.
Блок 3 контроля пролета предназначен для фиксации момента времени, когда дальность D между ЛА и объектом наблюдения в алгоритмах (1) равна 0, что соответствует моменту пролета ЛА над (или под) объектом наблюдения в вертикальной плоскости и слева или справа от объекта наблюдения в боковой плоскости. Блок 3 контроля пролета выполнен в виде триггера Шмитта.
Устройство 4 обработки результатов испытаний предназначено для статистической обработки результатов испытаний с целью получения достоверных оценок о величине промаха вероятности встречи ЛА и объекта наблюдения в конкретной серии электронных пусков. Вычисление оценок осуществляется непосредственно по выходным сигналам имитатора 2 ЛА, которыми являются в вертикальной плоскости величина Yg, а в горизонтальной zg - высота полета и боковое отклонение ЛА в нормальной земной системе координат.
Для вертикальной плоскости вводится поправка на величину высоты над горизонтом радиолокационного центра отражения объекта наблюдения Ygц. Таким образом, величины промахов равны:
Yотн=Yg-Ygц, (4.1)
zотн=zg, (4.2)
при D=0
B качестве оценок точности принимаются: математическое ожидание
дисперсия
среднее квадратическое отклонение
σYoтн= DYoтн (4.5)
Для оценки точности аппаратуры ЛА в боковой плоскости формулы аналогичны.
Вероятность встречи ЛА и объекта наблюдения при испытаниях определяется следующим образом. Фиксируются факты попадания ЛА в контуры объекта наблюдения nпоп и определяется вероятность встречи по известной формуле
Блок 6 фиксации реализаций устройства 4 обработки результатов испытаний предназначен для подсчета количества произведенных электронных пусков в серии и выдачи управляющего сигнала, когда будет произведен последний пуск из заданных. Блок 7 фиксации реализаций представляет собой обычный счетчик.
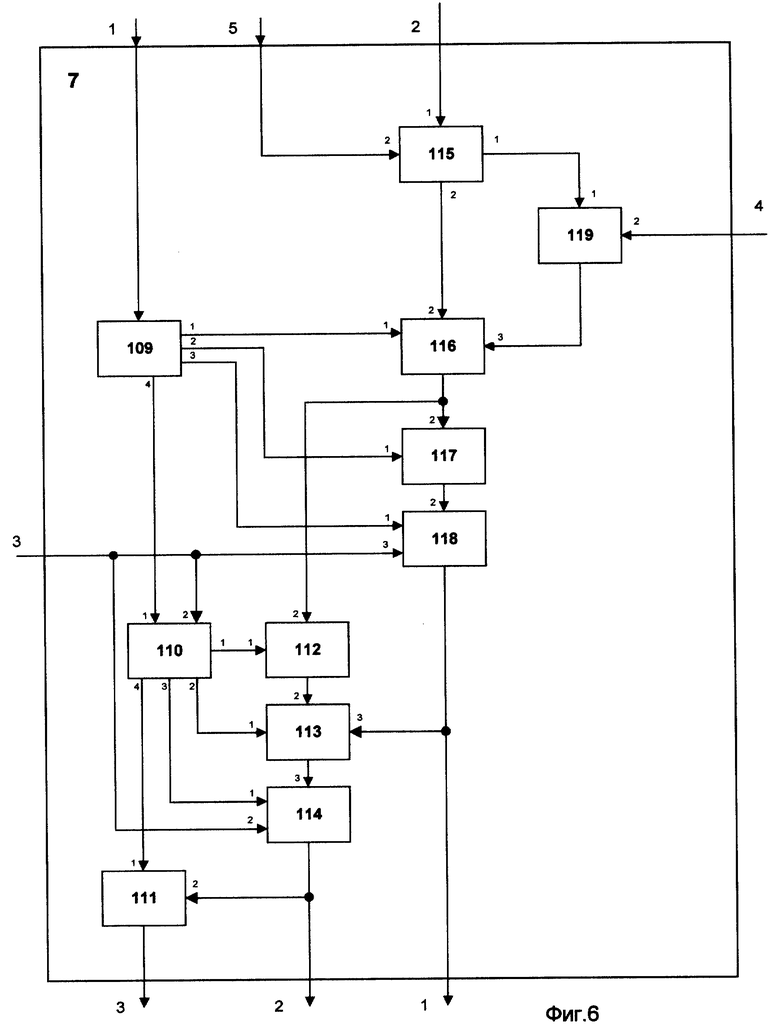
Вычислитель 7 оценок точности (см. фиг. 6) содержит блок 109 управления, таймер 110, вычислитель 111, сумматор 112, квадратор 113, вычислитель 114, переключатель 115, блок 116 памяти, сумматор 117, масштабный блок 118, сумматор 119.
Первый вход вычислителя 7 оценок точности по сигналу нулевой дальности соединен с входом блока 109 управления, первый-четвертый сигнальные выходы которого соединены с первыми входами блока 116 памяти, сумматора 117, масштабного блока 118 и таймера 110, соответственно.
Второй вход вычислителя 7 оценок точности по сигналу пролета подключен к первому входу переключателя 115, второй вход которого по сигналу настройки системы подключен к пятому входу вычислителя 7 оценок точности, первый выход - к первому входу сумматора 119, второй вход которого подключен к четвертому входу вычислителя 7 оценок точности, а выход соединен с третьим входом блока 116 памяти, второй вход которого подключен ко второму выходу переключателя 115.
Выход блока 116 памяти непосредственно подключен к второму входу сумматора 112, а через сумматор 117 соединен со вторым входом масштабного блока 118, третий вход которого соединен со вторыми входами вычислителя 114 и таймера 110 и подключен к третьему входу вычислителя 7 оценок точности.
Первый-четвертый выходы таймера 110 подключены к первым входам сумматора 112, квадратора 113, вычислителя 114 и вычислителя 111, соответственно. Выход вычислителя 111 соединен с третьим выходом вычислителя 7 оценок точности, второй выход которого подключен к выходу вычислителя 114, который соединен также со вторым выходом вычислителя 111. Третий вход вычислителя 114 соединен с выходом квадратора 113, второй вход которого соединен с выходом сумматора 112, а третий вход - с выходом масштабного блока 118, который является и первым выходом вычислителя 7 оценок точности.
На выходах вычислителя 7 оценок точности формируются сигналы математического ожидания, дисперсии и среднее квадратическое отклонение величины промаха (1-й, 2-й и 3-й выходы соответственно).
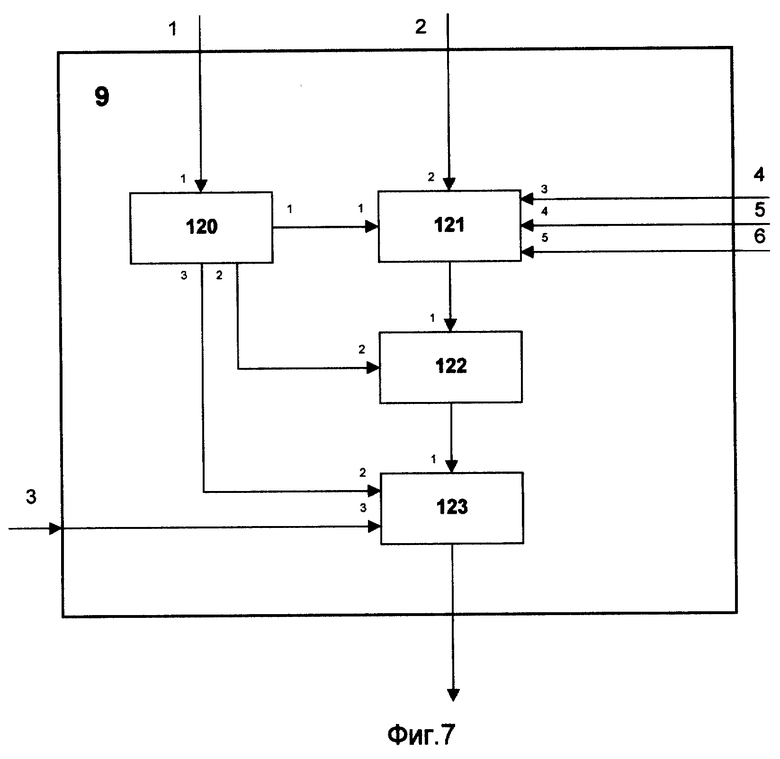
Вычислитель 9 вероятности встречи (см. фиг.7) содержит блок 120 управления, блок 121 сравнения, блок 122 памяти и блок 123 деления.
Первый вход вычислителя 9 вероятности встречи по сигналу нулевой дальности подключен к первому входу блока 120 управления, первый выход которого подключен к первому входу блока 121 сравнения, второй и третий выходы - к вторым входам блока 122 памяти и блока 123 деления, соответственно. Третий вход блока 123 деления подключен к третьему входу вычислителя 9 вероятности встречи, второй вход которого подключен к второму входу блока 121 сравнения.
Третий - пятый входы блока 121 сравнения подключены к четвертому - шестому входам вычислителя 9 вероятности встречи, а выход - к первому входу блока 122 памяти. Выход блока 123 деления по сигналу вычисленной вероятности встречи является выходом вычислителя 9 и соответствующим выходом системы.
Задатчик 10 параметров объекта наблюдения предназначен для ввода в систему габаритных (длина, ширина, высота) и радиотехнических (высота радиолокационного центра отражения) характеристик объекта наблюдения, а также количества пусков для получения достоверных оценок системы.
Задатчик 10 параметров объекта наблюдения представляет собой устройство, входным блоком которого является аналого-цифровой преобразователь, выход которого соединен со схемами памяти. В каждой схеме памяти записаны значения начальных или программных величин.
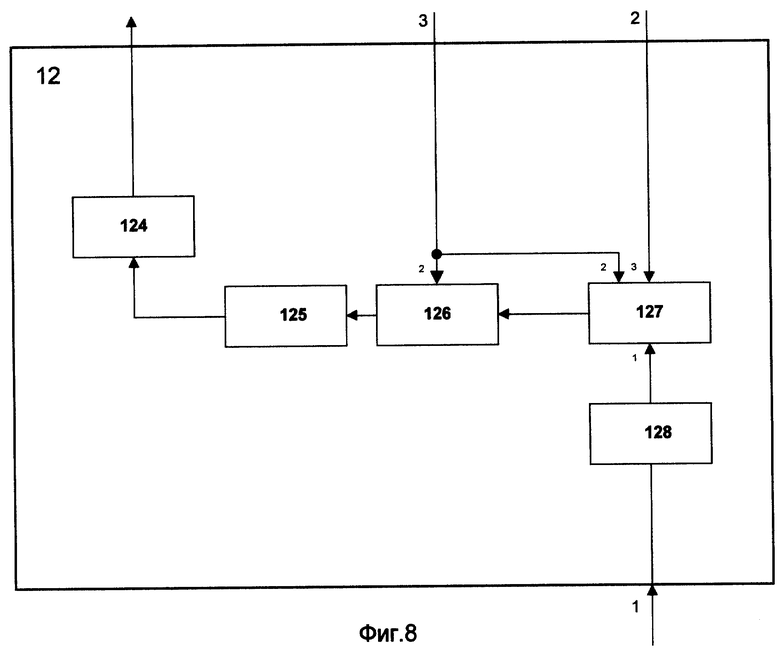
Устройство 12 управления испытаниями, входящее в состав имитатора 11 пункта управления (см. фиг. 8), содержит формирователь 124, устройство 125 задержки, ключ 126, счетчик 127 и формирователь 128 сигнала.
Первый вход устройства 12 управления испытаниями по сигналу запуска подключен ко входу формирователя 128 сигнала, выход которого подключен ко входу счетчика 127, выход которого подключен ко входу ключа 126. Управляющий вход ключа 126 по сигналу окончания пуска подключен к третьему входу устройства 12 управления испытаниями, а выход через последовательно соединенные устройство 125 задержки и формирователь 124 - к выходу сигнала запуска устройства 12 управления испытаниями, который является также выходом сигнала запуска имитатора 11 пункта управления. Второй и третий входы счетчика 127 по сигналам окончания пуска и количеству реализаций подключены соответственно к третьему и второму входам устройства 13 управления испытаниями.
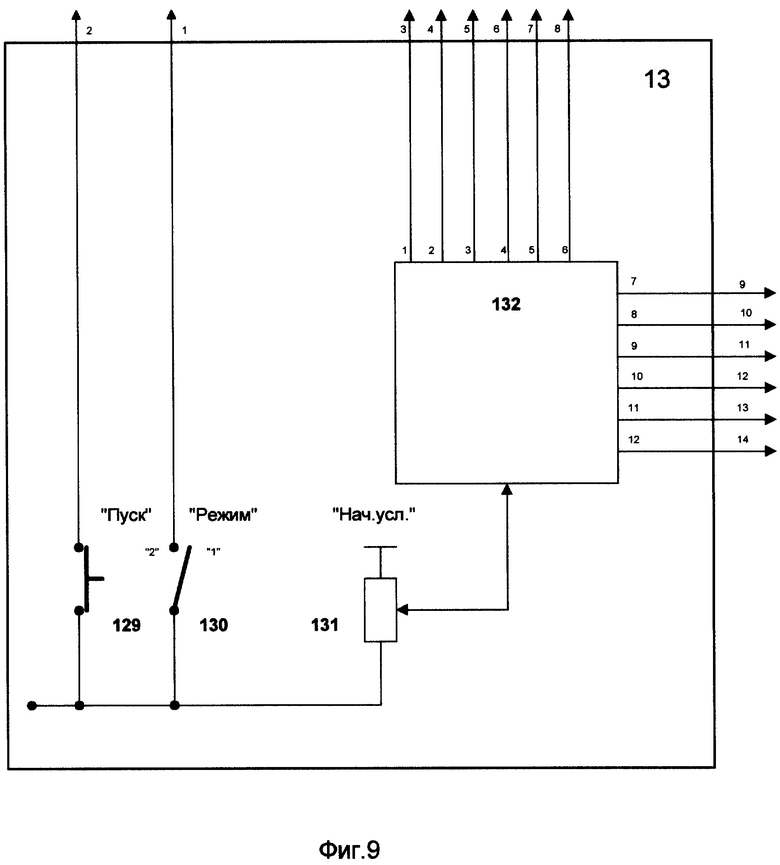
Пульт 13 управления, входящий в состав имитатора 11 пункта управления (см. фиг. 9), содержит кнопку 129 "Пуск", переключатель 130 "Режим", потенциометр 131 "Начальные условия" и задатчик 132 параметров, соединенные с источником питания. Выходы переключателя 130 и кнопки 129 являются первым и вторым выходами пульта 13 управления, соответственно, а выход потенциометра 131 подключен к входу задатчика 132 параметров, выходы которого являются выходами с третьего по четырнадцатый пульта 13 управления.
Задатчик 132 параметров представляет собой устройство, входным блоком которого является аналого-цифровой преобразователь, выход которого соединен со схемами памяти. В каждой схеме памяти записаны значения начальных или программных величин.
Имитаторы 14, 15, 16 датчиков угловых скоростей, измерителя углов и измерителя линейных ускорений предназначены для имитации динамики реальных приборов исследуемой системы управления ЛА. Они реализуют хорошо известные передаточные функции [3,5].
Имитатор 18 радиовысотомера предназначен для воспроизведения условий движения летательного аппарата над поверхностью и реализует известную передаточную функцию [3,5]. Входным блоком имитатора 18 радиовысотомера является сумматор, другой вход которого соединен с имитатором 19 подстилающей поверхности. Сигнал, поступающий на первый вход сумматора имитатора 18 радиовысотомера, пропорциональный сигналу Yg, вырабатываемому имитаторам 2 ЛА, складывается с сигналом Yм, вырабатываемым имитатором 19 подстилающей поверхности. На выходе имитатора 18 радиовысотомера формируется сигнал высоты полета ЛА над подстилающей поверхностью - H (например, морем). Имитатор 19 подстилающей поверхности и имитатор 17 ветровых порывов представляют собой генераторы случайных сигналов.
Индикатор 20 предназначен для визуального отображения траектории ЛА и представляет собой, например, видеотерминальное устройство.
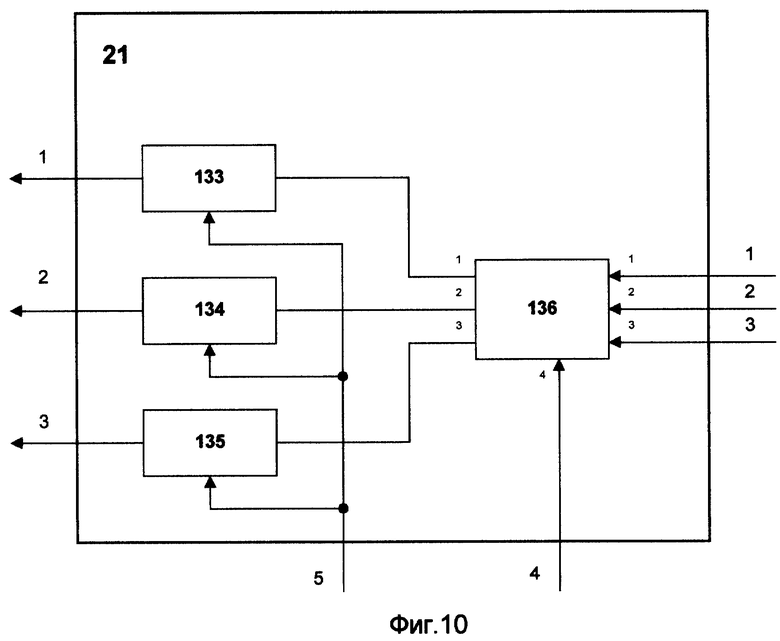
Имитатор 21 рулевых механизмов воспроизводит динамику рулевых приводов, приводящих в движение рули высоты, направления и элероны.
Имитатор 21 рулевых механизмов (фиг. 10) содержит имитатор 133 привода курса, имитатор 134 привода крена и имитатор 135 привода тангажа, выходы которых являются соответствующими выходами имитатора 21 рулевых механизмов, а входы подключены к выходам переключателя 136, входы которого являются первым-четвертым входами имитатора 21 рулевых механизмов. Управляющие входы имитаторов 133, 134, 135 подключены к пятому входу имитатора 21 рулевых механизмов.
Имитаторы приводов реализуют известные передаточные функции [7]. В качестве переключателя 136 используется обычное реле, у которого четвертый, управляющий, вход подключен к четвертому входу имитатора 21 рулевых механизмов.
Устройство 22 выработки сигналов управления предназначено для формирования сигналов управления рулевыми механизмами и является прибором исследуемой СУ ЛА. Устройство 22 выработки сигналов управления содержит три канала управления рулями высоты, направления и элеронами, соответственно. Алгоритмы формирования законов управления для большинства беспилотных ЛА широко известны и имеют вид [3, с. 78, рис. 4.4]:


az'=nzg, (5.4)
ay'=nyg, (5.5)
h=Hg-Hпр(t), (5.6)
где Kυ,Kυ,Tz,Kh,Th,Ksh,Kny,KΨ,KΨ,TΨ,Kγ,Kγ,Tγ - передаточные коэффициенты; nz, ny, nz - перегрузки; δпр Hпр(t), υ1 и Ψ1 - программные значения соответствующих параметров, определяющие закон движения ЛА; знаком (') помечены сигналы, поступающие с имитаторов приборов реальной аппаратуры СУ.
συ1= Ksυ[υA-υA0+Kυy(υ-υ0)+Kωzωz+αуст+υпр],
где Kυy,Kωz - передаточные коэффициенты; υA0,υ0 суть υA и υ в момент начала наведения в "продольной задаче" на объект наблюдения; υпр и αуст - установочные значения параметров.
где KΨy - передаточные коэффициенты; ΨA0 - малая константа (например, ΨA0 = 0,5 град), Ψ0 - угол курса в момент "упреждения".
Структурная схема устройства 22 выработки сигналов управления представлена на фиг 11, где обозначены: 137 - таймер; 138 - сумматор; 139 - блок памяти; 140 - дифференциатор; 141 - функциональный блок; 142 - дифференциатор; 143 - сумматор; 144, 145 - дифференциаторы; 146 - интегратор; 147 - сумматор; 148 - функциональный блок; 149 - сумматор; 150, 151 - масштабные блоки; 152 - сумматор; 153 - функциональный блок; 154, 155, 156 - сумматоры; 157 - масштабный блок; 158, 159 - сумматоры.
Выходы таймера 137 подключены к первым входам всех блоков устройства 22 выработки сигналов управления, а вход - к двенадцатому входу устройства 22 выработки сигналов управления. Девятый вход устройства 22 через масштабный блок 151 подключен ко второму входу сумматора 156, выход которого является третьим выходом устройства 22 выработки сигналов управления, а третий вход подключен к выходу сумматора 152, третий вход которого через функциональный блок 153 соединен с выходом функционального блока 141, а второй вход соединен с шестым входом функционального блока 141 и подключен к первому входу устройства 22 выработки сигналов управления.
Седьмой, восемнадцатый, четырнадцатый, тринадцатый и четвертый входы устройства 22 подключены соответственно ко входам со второго по пятый и седьмому входу функционального блока 141, а пятнадцатый вход через масштабный блок 157 подключен к седьмому входу сумматора 156. Четвертый вход сумматора 156 подключен к выходу сумматора 154, третий вход которого подключен к выходу дифференциатора 144, второй вход которого соединен со вторым входом сумматора 154 и подключен к четвертому входу устройства 22 выработки сигналов управления.
Одиннадцатый вход устройства 22 подключен ко второму входу сумматора 138, выход которого подключен непосредственно ко второму входу сумматора 155, а через дифференциатор 145 - к третьему входу сумматора 155. Выход сумматора 155 подключен к пятому входу сумматора 156, шестой вход которого через интегратор 146 подключен к выходу сумматора 138. Третий вход сумматора 138 через блок 139 памяти подключен к шестнадцатому входу устройства 22 выработки сигналов управления, второй вход которого подключен ко второму входу сумматора 147 и второму входу функционального блока 148.
Выход функционального блока 148 подключен через сумматор 147 ко второму входу сумматора 158, третий вход которого подключен к выходу сумматора 149, второй вход которого соединен с шестым входом функционального блока 148 и подключен к пятому входу устройства 22 выработки сигналов управления, который через дифференциатор 142 подключен также к третьему входу сумматора 149. Входы с третьего по пятый функционального блока 148 подключены к восьмому, семнадцатому и восемнадцатому входам устройства 22, соответственно.
Десятый вход устройства 22 через масштабный блок 150 подключен к четвертому входу сумматора 158, выход которого подключен ко второму входу устройства 22. Третий вход устройства 22 подключен к третьему входу сумматора 159. Шестой вход устройства 22 подключен ко второму входу сумматора 143 непосредственно, а через дифференциатор 140 - к третьему входу сумматора 143, выход которого подключен к второму входу сумматора 159, а выход сумматора 159 служит первым выходом устройства 22.
Предлагаемая система работает следующим образом.
Вначале в соответствии с программой проведения испытаний осуществляется настройка системы.
С помощью переключателя 130 "Режим" выбирается плоскость, в которой исследуется движение ЛА: "продольная" или "боковая". При этом срабатывает переключатель 5, и блок 8 памяти устройства 4 обработки результатов испытаний подключается к соответствующему сигналу имитатора 2 ЛА, характеризующему промах при встрече ЛА и объекта наблюдения: для "продольной задачи" - Yg и для "боковой задачи" - zg.
Срабатывает также переключатель 115 в вычислителе 7 оценок точности и при решении "продольной задачи" подключает к вычислительным блокам сигнал, поступающий с 4-го выхода задатчика 10 параметров объекта наблюдения, который характеризует высоту радиолокационного центра отражения объекта наблюдения Ygц в формуле (4). Одновременно срабатывают переключатель 136 имитатора 21 рулевых механизмов, который подключает соответствующие каналы имитаторов силовых приводов к выходам устройства 22 выработки сигналов управления, и переключатель 42 имитатора 1 измерителя координат объекта наблюдения, который подключает соответствующий канал сигнала углов визирования объекта наблюдения к устройству 22 выработки сигналов управления.
Выбирается тип решаемой задачи, для чего движок потенциометра 131 пульта 13 управления устанавливается в положение, соответствующее выбранной задаче. При этом с выходов ячеек памяти задатчика 132 параметров в устройство 22 поступают сигналы, соответствующие программным параметрам траектории движения ЛА в алгоритмах (5), а в имитатор 1 измерителя координат объекта наблюдения поступают сигналы начальной установки дальности Do до объекта наблюдения и параметров относительного движения объекта наблюдения и ЛА в алгоритмах (1).
С задатчика 10 параметров объекта наблюдения вводятся параметры объекта наблюдения - длина, ширина, высота, высота радиолокационного центра отражения, а также количество пусков в серии испытаний, достаточное для получения достоверных оценок в соответствии с зависимостями (4).
При нажатии кнопки 129 "Пуск" пульта 13 управления осуществляется запуск системы. Вначале сигнал со второго выхода пульта 13 управления поступает через формирователь 128 устройства 12 управления испытаниями на первый вход счетчика 127, на второй и третий входы которого поступают сигнал с выхода блока 3 контроля пролета, фиксирующий окончание пуска системы, и сигнал с задатчика 10 параметров объекта наблюдения, определяющий количество реализаций при испытаниях - N. Когда количество произведенных пусков системы будет равно заданному количеству реализаций, то сигнал на выходе счетчика 127 будет равен 0. Так как в первый момент они не равны, то сигнал запуска с выхода счетчика 127 через ключ 126, устройство 125 задержки и формирователь 124 поступает на управляющие входы имитатора 1 измерителя координат объекта наблюдения, имитатора 2 ЛА, имитатора 14 датчиков угловых скоростей, имитатора 15 измерителя углов, имитатора 16 линейных ускорений, имитатора 17 ветровых порывов, имитатора 19 подстилающей поверхности, имитатора 18 радиовысотомера и устройства 22 выработки сигналов управления, которые вначале устанавливаются в исходное состояние, а затем запускаются, и начинается процесс имитации полета ЛА и его сближения с объектом наблюдения в исследуемой плоскости.
В имитаторе 1 измерителя координат объекта наблюдения по исходным данным вырабатываются сигналы о положении ЛА в пространстве, его относительной скорости движения, а также о положении объекта наблюдения в пространстве в соответствии с алгоритмами (1) - (3) и вычисляются углы Ψa или υa визирования объекта наблюдения, которые поступают в устройство 22 выработки сигналов управления.
Сигналы, пропорциональные угловым скоростям и линейным ускорениям корпуса ЛА, поступают из устройств 43 и 44 моделирования бокового и продольного движения ЛА через имитаторы 14, 15 и 16 в устройство 22 выработки сигналов управления. Сигнал, пропорциональный текущей высоте полета ЛА, поступает из устройства 44 моделирования продольного движения на вход имитатора 18 радиовысотомера, в котором он суммируется с сигналом, имитирующим подстилающую поверхность, и формируется сигнал, пропорциональный текущей высоте полета ЛА над подстилающей поверхностью. Этот сигнал поступает в устройство 22 выработки сигналов управления. В устройстве 22 выработки сигналов управления в соответствии с алгоритмами (5) вырабатываются сигналы, управляющие силовыми приводами рулевых механизмов ЛА.
В процессе испытаний с имитаторов 17, 19 ветровых порывов и подстилающей поверхности поступают соответствующие возмущающие сигналы, действующие на систему управления ЛА в реальных условиях.
В процессе испытаний в зависимости от типа решаемой задачи ("продольная" или "боковая") сигналы, характеризующие движение ЛА в вертикальной и боковой плоскостях с 9-го и 10-го выходов имитатора 2 ЛА, через переключатель 5 поступают на вход блока 8 памяти и индикатора 20 для визуального контроля траектории движения ЛА, а сигнал текущей дальности с 3-го выхода имитатора 1 - на вход блока 3 контроля пролета. В момент, когда текущая дальность D будет равна нулю, на выходе блока 3 контроля пролета появится сигнал. По этому сигналу в блоке 8 памяти фиксируется значение величин, характеризующих промах при встрече ЛА и объекта наблюдения (при D = 0) для "продольной задачи" - Yg и для "боковой задачи" - zg. Сигнал с выхода блока 3 контроля пролета поступает также на 2-й вход устройства 12 управления испытаниями, по которому срабатывает ключ 126 и исчезает сигнал управления испытаниями с третьего выхода устройства 12. При этом система возвращается в исходное состояние. Если количество произведенных пусков еще не равно количеству заданных пусков N и существует сигнал на выходе счетчика 127, то после возвращения системы в исходное состояние и срабатывания ключа 136 (т.к. сигнал дальности D не равен 0) появится вновь сигнал на выходе устройства 12 управления испытаниями и произойдет новый пуск системы при тех же начальных условиях и процесс повторится вновь.
Процесс проведения испытаний системы аппаратуры ЛА будет продолжаться до тех пор, пока количество проведенных пусков не будет равно количеству заданных пусков N. В этот момент исчезнет сигнал на выходе счетчика 127 и соответственно исчезнут сигналы на выходе устройства 12 управления испытаниями и завершится серия пусков, а система перейдет в режим обработки результатов.
В момент равенства количества проведенных пусков количеству заданных пусков N появится сигнал на выходе блока 6 фиксации реализаций, который поступит на управляющие входы вычислителей 7 и 9 оценок точности и вероятности встречи, на информационные входы (2-е) которых поступит массив зафиксированных значений промахов при встрече ЛА и объекта наблюдения (в зависимости от типа решаемой задачи вертикальное или боковое отклонение). По этим значениям по формулам (4) в вычислителях 7 и 9 будут определены значения математического ожидания, дисперсии, среднего квадратического отклонения промаха и вероятности встречи. На этом испытания в данной серии испытаний завершаются.
Предлагаемая комплексная испытательная система для прогнозирования результатов натурных испытаний обеспечивает возможность многократного (в сотни раз) увеличения объема испытаний реальной аппаратуры ЛА, по сравнению с натурными экспериментами, и получения объемов данных, достаточных для статистической обработки. При этом повышается достоверность проведения наземных испытаний при меньшей трудоемкости.
Промышленная применимость изобретения определяется тем, что на основании приведенного описания и чертежей предлагаемая система может быть изготовлена при использовании известных комплектующих изделий и технологического оборудования, применяемого для изготовления радиоэлектронных комплексов, и использована в качестве комплексной испытательной системы для прогнозирования результатов натурных испытаний беспилотного летательного аппарата.
СПИСОК ЛИТЕРАТУРЫ
1. Моделирование и испытания радиооборудования. П.П.Бескид, Е.М. Виноградов, В.И.Винокуров и др. - Л.: Судостроение, 1981. - С. 228, рис. 6.21.
2. Свидетельство РФ N 11626 на полезную модель, МПК G 09 B 9/00, публикация 16.10.99 г., прототип.
3. Лебедев А.А., Чернобровкин А.С. Динамика полета, Оборонгиз, М., 1962 г., с. 403-404, 473-474.
4. Абгарян К. А. , Колязин Э.А., Мишин В.П. Динамика ракет. М., Машиностроение, изд. 2, 1990 г., с. 53-55.
5. Кузовков Н.Г. Система стабилизации летательных аппаратов (баллистических и зенитных ракет). М.: Высшая школа, 1976 г.
6. Справочник по радиоэлектронике. Под общ. ред. А.А.Куликовского, т. 3, М., Энергия, 1970 г., с. 558-565.
7. Гамынин Н.С. Гидравлический привод систем управления. М., Машиностроение, 1976 г., с. 11, рис. 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| УСТРОЙСТВО ОЦЕНКИ ДЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 2005 |
|
RU2304790C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2205441C1 |
| КОДИРУЮЩИЙ ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ СКАНИРУЮЩЕГО ЛУЧА В СИСТЕМЕ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117901C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
Изобретение относится к испытательным устройствам. Система содержит имитатор летательного аппарата, имитатор радиовысотомера, имитатор пункта управления, устройство выработки сигналов управления. В систему введены имитатор датчиков угловых скоростей, имитатор измерителя углов, имитатор измерителя линейных ускорений, имитатор рулевых механизмов, имитатор ветровых порывов, имитатор подстилающей поверхности и имитатор измерителя координат объекта наблюдения, а также задатчик параметров объекта наблюдения, блок контроля пролета и устройство обработки результатов испытаний, содержащее переключатель, блок памяти, блок фиксации реализаций, вычислитель оценок точности и вычислитель вероятности встречи, и индикатор. Перечисленные элементы системы соответствующим образом соединены между собой. Предложенная система позволит многократно увеличить объем испытаний реальной аппаратуры, при этом повысится достоверность проведения наземных испытаний при меньшей трудоемкости. 11 ил.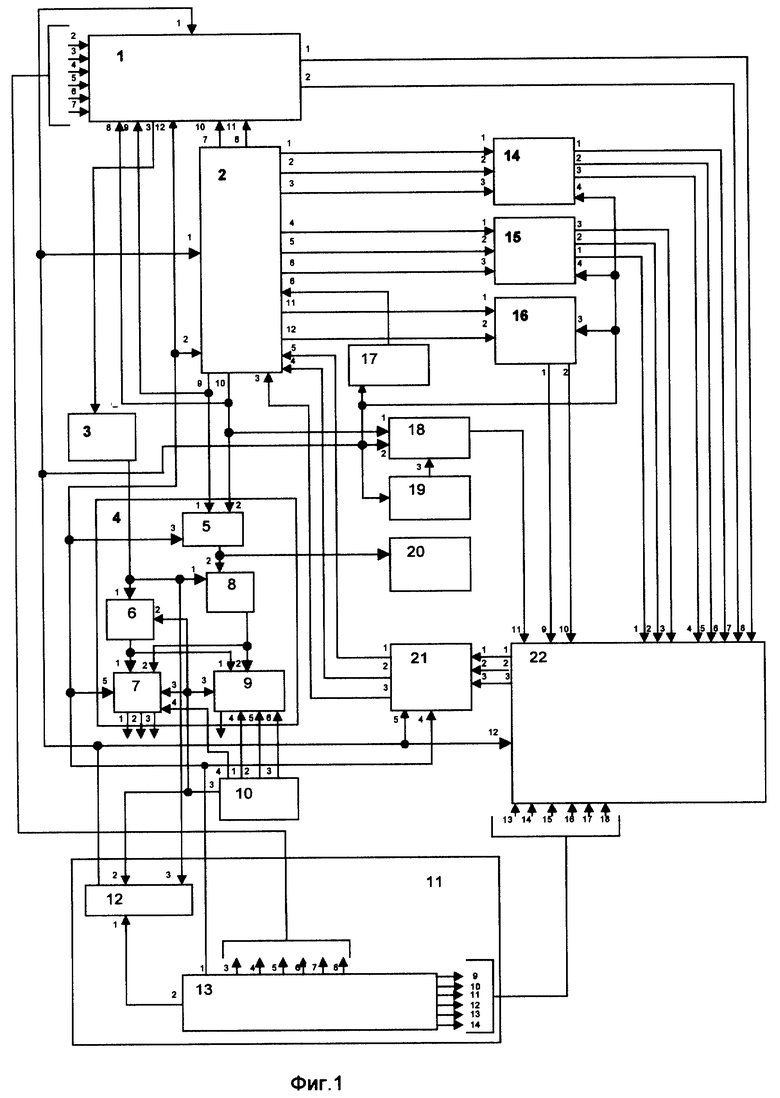
Система для прогнозирования результатов натурных испытаний беспилотного летательного аппарата, содержащая имитатор летательного аппарата, имитатор радиовысотомера, имитатор пункта управления, включающий пульт управления, и подключенное к его выходу, вырабатывающему сигнал запуска, устройство управления испытаниями, а также устройство выработки сигналов управления, входы которого, воспринимающие сигналы программных параметров, подключены к соответствующим выходам пульта управления, а вход, воспринимающий сигнал запуска, объединен со входами имитатора радиовысотомера и имитатора летательного аппарата, воспринимающими сигнал запуска, и подключен к выходу устройства управления испытаниями, выход имитатора летательного аппарата, выдающего сигнал высоты полета, подключен к сигнальному входу имитатора радиовысотомера, а выход пульта управления, выдающий сигнал настройки системы, подключен к соответствующему входу имитатора летательного аппарата, отличающаяся тем, что в нее введены имитатор датчиков угловых скоростей, имитатор измерителя углов, имитатор измерителя линейных ускорений, имитатор рулевых механизмов, имитатор ветровых порывов, имитатор подстилающей поверхности и имитатор измерителя координат объекта наблюдения, вход каждого из которых, воспринимающий сигнал запуска, подключен к выходу устройства управления испытаниями, а также задатчик параметров объекта наблюдения, блок контроля пролета и устройство обработки результатов испытаний, содержащее переключатель, блок памяти, блок фиксации реализаций, вычислитель оценок точности и вычислитель вероятности встречи, а также индикатор, соединенный с выходами переключателя, при этом выходы имитатора летательного аппарата, выдающие сигналы угловых скоростей по курсу, крену и тангажу, подключены к соответствующим входам имитатора датчиков угловых скоростей, выходы же имитатора летательного аппарата, выдающие сигналы углов курса, крена и тангажа, подключены к соответствующим входам имитатора измерителя углов, а выходы имитатора летательного аппарата, выдающие сигналы линейных ускорений, - к соответствующим входам имитатора измерителя линейных ускорений, выходы которого, а также выходы имитатора измерителя углов и имитатора датчиков угловых скоростей подключены к соответствующим входам устройства выработки сигналов управления, выходы имитатора летательного аппарата, выдающие сигналы скорости полета и угла наклона траектории, подключены к соответствующим входам имитатора измерителя координат объекта наблюдения, выходы которого, выдающие сигналы углов визирования объекта наблюдения, подключены к соответствующим входам устройства выработки сигналов управления, выходы которого, выдающие сигналы управления рулями высоты, направления и элеронами, подключены к входам имитатора рулевых механизмов, а вход, воспринимающий сигнал высоты полета, - к выходу имитатора радиовысотомера, вход которого, воспринимающий сигнал подстилающей поверхности, подключен к выходу имитатора подстилающей поверхности, выходы имитатора рулевых механизмов, выдающие сигналы углов закладки рулей направления, высоты и элеронов, подключены к соответствующим входам имитатора летательного аппарата, вход которого, воспринимающий сигнал имитации ветровых порывов, подключен к выходу имитатора ветровых порывов, выход пульта управления, выдающий сигнал настройки системы, соединен с соответствующими входами переключателя, вычислителя оценок точности, имитатора рулевых механизмов и имитатора измерителя координат объекта наблюдения, входы которого, воспринимающие сигналы начальной установки, подключены к соответствующим выходам пульта управления, выход, выдающий сигнал текущей дальности, - к входу блока контроля пролета, а входы, воспринимающие сигналы высоты полета и бокового отклонения летательного аппарата, объединены с соответствующими входами переключателя и подключены к соответствующим выходам имитатора летательного аппарата, выход переключателя соединен с информационным входом блока памяти, управляющий вход которого объединен с управляющими входами блока фиксации реализаций и устройства управления испытаниями и подключен к выходу блока контроля пролета, выход блока фиксации реализаций подключен ко входам вычислителя оценок точности и вычислителя вероятности встречи, воспринимающим сигнал нулевой дальности, входы указанных вычислителей, воспринимающие сигнал пролета, подключены к выходу блока памяти, выход задатчика параметров объекта наблюдения, выдающий сигнал числа реализаций, подключен к соответствующим входам устройства управления испытаниями, блока фиксации реализаций, вычислителя оценок точности и вычислителя вероятности встречи, входы которого, воспринимающие сигналы размеров объекта наблюдения, подключены к соответствующим выходам задатчика параметров объекта наблюдения, выход которого, выдающий сигнал высоты радиолокационного центра отражения объекта наблюдения, подключен к соответствующему входу вычислителя оценок точности, выходы которого и выход вычислителя вероятности встречи являются выходами системы.
| Счетчик вылета пчел из улья | 1928 |
|
SU11626A1 |
| US 4751662 A, 14.06.1988 | |||
| US 4891010 A, 02.01.1990 | |||
| Грузовая подвеска крана | 1984 |
|
SU1232631A1 |
| US 4179823 A, 25.12.1979 | |||
| СПОСОБ ВЫПОЛНЕНИЯ ТРЕНИРОВОЧНОГО ПОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2114460C1 |
| Гироскопический указатель крена железнодорожных или иных вагонов | 1947 |
|
SU71757A1 |

