Изобретение относится к металлургии, в частности к конструкции роликовых проводок проволочных или сортовых станов, и может быть использовано в клетях прокатных станов с любой скоростью раската.
Изобретение может использоваться в сортовых, проволочных и других станах, где необходим контроль кинематических параметров стана, таких как частота вращения роликов привалковой арматуры, ускорение и торможение роликов, линейные скорости раската и ее изменения по клетям стана.
Из уровня техники известна конструкция роликовой проводки с парой шарнирно укрепленных роликодержателей, в каждом из которых на оси вращения установлен ролик (авторское свидетельство СССР №478637, кл. В21В 39/16, 1976 г.). Зазор между роликами является выходным отверстием для подаваемого в валки раската. Недостатком конструкции является отсутствие средств контроля скорости вращения роликов, что при нарушении свободного вращения роликов в результате попадания в подшипники плены или разрушения подшипников, или наварки ролика приводит к застреванию раската, что снижает производительность стана.
Известна также роликовая проводка (патент РФ, 2013151 C1, 5 В21В 39/16), выбранная в качестве ближайшего аналога, состоящая из полого корпуса с отверстиями для пропуска раската, а также с парой роликодержателей в виде двухплечих рычагов с направляющими роликами на их концах. Вблизи каждого из роликов установлены по одному электрическому датчику вращения ролика, выполненного в виде катушки с сердечником. Выходным сигналом датчика является разность потенциалов на концах катушки, наведенная скоростью изменения магнитного потока от одиночной магнитной метки на торце ролика. Работает проводка следующим образом. Магнитная метка на ролике, который, вращаясь вследствие контакта с движущимся раскатом, индуцирует своей магнитной меткой электрический импульс, наличие которого соответствует вращению ролика. В случае остановки одного или обоих роликов в результате забуривания раската в проводке, или наварке рабочей поверхности ролика, или разрушения подшипника импульсы в датчике вращения не индуцируются. Информация о работоспособности роликовой проводки используется в системе управления блоком чистовых клетей проволочного стана. Отсутствие импульсов от датчика вращения говорит о необходимости остановки прокатного стана и ревизии роликовой проводки.
Недостатком прототипа устройства является наличие одной магнитной метки на каждом из роликов и использование индукционного датчика, что ограничивает применение роликовой проводки в клетях с более низкой, чем в последних чистовых клетях скоростью раската (соответственно с более низкой скоростью вращения роликов).
Поскольку уровень сигнала, индуцируемого в катушке датчика, напрямую зависит от скорости изменения магнитного потока от метки на ролике, т.е. от скорости вращения ролика, и, кроме того, форма (топология) намагниченной области одиночной метки имеет вид плавно спадающей горки, а это приводит к получению ненадежно низкой разности потенциалов в индуктивном датчике, сравнимой с уровнем неизбежных электромагнитных наводок и тепловых шумов. Это приводит к понижению надежности блока контроля работы прокатного стана и, следовательно, к снижению его производительности. Кроме того, стремление к увеличению уровня сигнала за счет наращивания числа витков в катушке датчика неизбежно будет ограничено двумя причинами: во-первых, пространственной ограниченностью области расположения датчика при увеличении объема катушки; во-вторых, увеличением теплошумовых и внешних наводок с ростом числа витков в катушке. Известно, что уровень сигнала тем больше, чем более резкая граница области намагничивания и чем быстрее проходит эта область вблизи катушки.
Для устранения указанных недостатков (одиночная метка и катушка в качестве датчика вращения) с целью повышения надежности контроля работы стана, а следовательно, производительности прокатного стана, в предлагаемой конструкции роликовой проводки предусмотрено наличие нескольких пар (например, три) чередующихся разнополярных магнитных меток, расположенных на равных расстояниях по периметру торцов роликов, а также расположенных на вилках роликодержателей гальваномагнитных датчиков скорости вращения (например, датчики на основе эффекта Холла). В отличие от прототипа, где используются индукционные датчики наличия или отсутствия вращения, в предлагаемой конструкции уровень сигнала не зависит от скорости прохождения метки вблизи датчика, а определяется лишь уровнем намагниченности ролика в области метки. Это позволяет отслеживать не только наличие или отсутствие вращения ролика, но и измерять величину скорости и ее изменения, что повышает надежность контроля за работой каждой роликовой проводки прокатного стана. Например, в результате подклинивания одного из роликов его скорость вращения начала снижаться по сравнению с заданной. Гальваномагнитный датчик регистрирует снижение частоты следования импульсов (заметим, одинаковой амплитуды, в отличие от прототипа, где уровень сигналов понижается с уменьшением частоты их следования), а блок контроля сигнализирует о начале развития неисправности в работе конкретной роликовой проводки. Это позволяет своевременно вмешаться в процесс прокатки и принять соответствующие меры для предотвращения аварии или неисправности в работе роликовой проводки.
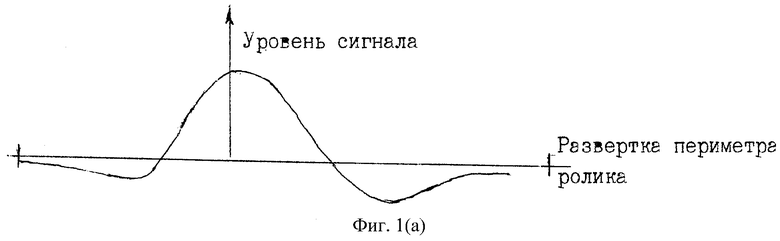
Наличие нескольких пар разнополярных магнитных меток на торцевой поверхности ролика позволяет получать увеличенную частоту следования сигналов от датчика скорости вращения ролика, что повышает надежность определения величины этой скорости. Например, как это используется в прототипе, одной метке на ролике соответствует один сигнал датчика на один оборот ролика. При этом сигнал (независимо от типа датчика, индукционного или гальванического) имеет такую же форму, как и распределение намагниченности в области метки, т.е. бугорка с пологими краями, как показано на фиг.1а.
При наличии нескольких пар меток на ролике топологическая кривая распределения намагниченности по периметру ролика, равно как и форма сигнала, получаемого с гальваномагнитного датчика, имеет форму синусоиды (фиг.1б). Очевидно, что в блок обработки сигналов с датчика поступит в шесть раз больше сигналов, чем в случае одиночной метки, и синусоидальная их форма, в отличие от непериодической формы (фиг.1а), значительно упрощает обработку, например, в цифровой код, что, в свою очередь, повышает надежность системы контроля за работой прокатного стана.
Для получения нескольких разнополярных пар меток можно воспользоваться либо устройством в виде электромагнита с несколькими парами разнополярных полюсов, расположенных по окружности, равной окружности торца ролика, либо устройством с жестко закрепленными постоянными магнитами, расположенными подобным образом по периметру окружности, равной окружности торца ролика.
При монтаже роликовой проводки вначале наносят метки по окружности торца ролика прикосновением к полюсам электромагнитного устройства или устройства с постоянными магнитами, т.е. к источнику нескольких разнополярных пар магнитных полюсов. Затем ролики устанавливают намагниченным торцом к месту расположения датчика, корпус которого закрепляется на плече роликодержателя, например подпружиненными хомутами или быстросъемными винтами (фиг.2), для оперативной замены в случае необходимости.
Роликовая проводка работает следующим образом. Раскат, касаясь пары роликов, вращает их. Магнитные метки на роликах генерируют в гальваномагнитных датчиках сигналы, уровень которых не зависит от числа оборотов роликов, т.е. от номера клети (чистовой или промежуточной). Частота синусоидальных сигналов с датчиков является функцией частоты вращения (или угловой скорости) роликов, которая является опорным параметром для каждой клети при нормальной (без сбоев) работе прокатного стана. При нарушениях в работе стана, приводящих к изменению скорости вращения ролика на любой из контролируемой клети, блок обработки и контроля сигналов сигнализирует о месте и характере сбоя (или неисправности) по степени отклонения измеряемой датчиком частоты от заданной для данной клети.
Таким образом, оператор стана имеет возможность более полного контроля и оперативного вмешательства в работу прокатного стана.
Роликовая проводка по предлагаемой конструкции содержит пару роликодержателей, на каждом из которых 1 (фиг.2) к поверхности плеча вилкообразного конца 2 закреплен корпус 3 датчика 4 скорости вращения ролика 5 с равномерно расположенными по периметру торца ролика магнитными метками 6. Датчик 4 с выводами 7 герметично упакован в корпусе 3 и расположен напротив траектории вращения меток. Корпус 3 датчика 4 крепится к плечу 2 двумя винтами 8, проходящими через отверстия корпуса 3 и ввинчивающихся в резьбовые отверстия 9 плеча 2.
При необходимости замены роликовой проводки оба корпуса с датчиками снимаются с роликодержателей вывинчиванием винтов и укрепляются к новой проводке ввинчиванием этих же винтов в такие же резьбовые отверстия в плечах роликодержателей.
Использование предлагаемой роликовой проводки позволяет увеличить производительность прокатного стана и качество продукции за счет надежного и расширенного по всем необходимым клетям контроля за скоростью вращения роликов, а также своевременного предотвращения аварийных ситуаций на прокатном стане.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОЛИКОВАЯ ПРОВОДКА | 1991 |
|
RU2013151C1 |
| СПОСОБ КОНТРОЛЯ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ НЕПРЕРЫВНОГО ПРОКАТНОГО СТАНА | 2006 |
|
RU2320435C2 |
| РОЛИКОВАЯ ПРОВОДКА С УСТРОЙСТВОМ ДЛЯ КОНТРОЛЯ ВРАЩЕНИЯ РОЛИКОВ | 2001 |
|
RU2221658C2 |
| РОЛИКОВАЯ ПРОВОДКА С УСТРОЙСТВОМ ДЛЯ КОНТРОЛЯ ВРАЩЕНИЯ РОЛИКОВ | 1995 |
|
RU2094145C1 |
| Вводная роликовая коробка прокатной клети | 1986 |
|
SU1378972A1 |
| ВВОДНАЯ РОЛИКОВАЯ КОРОБКА | 2000 |
|
RU2192933C2 |
| Выводная направляющая проводка | 1982 |
|
SU1045973A1 |
| Вводная роликовая коробка проволочного стана | 1979 |
|
SU884775A1 |
| ВВОДНАЯ РОЛИКОВАЯ КОРОБКА (ЕЕ ВАРИАНТЫ) | 2001 |
|
RU2220800C2 |
| Способ настройки роликовой проводки прокатной клети и устройство для его осуществления | 1981 |
|
SU975132A1 |

Изобретение относится к оборудованию прокатного производства и может использоваться в черной и цветной металлургии и других отраслях, в частности к роликовой проводке прокатной клети. Роликовая проводка содержит магнитогальванический датчик скорости вращения с уровнем выходного сигнала, не зависящим от скорости вращения роликов, а частота следования сигналов является функцией числа оборотов роликов, которые имеют несколько разнополярных пар магнитных меток, расположенных равномерно по периметру торцов роликов. Изобретение обеспечивает возможность использования роликовой проводки в клетях с более низкой, чем в чистовых клетях скоростью раската, и повышений, надежности контроля работы стана. 2 ил.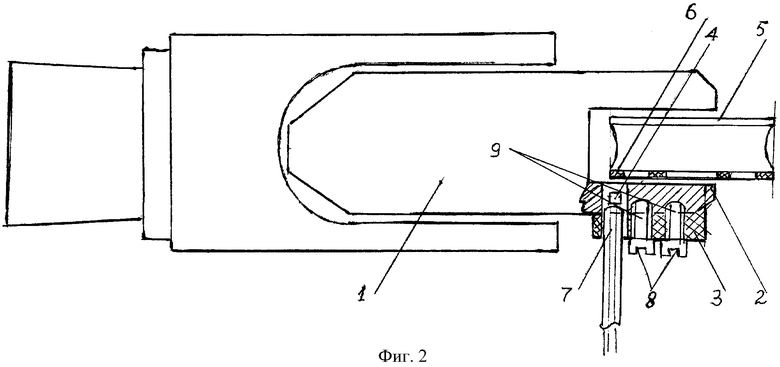
Роликовая проводка клетей прокатного стана, содержащая пару роликодержателей, к каждому из которых прикреплен датчик вращения ролика, и пару роликов с магнитными метками, отличающаяся тем, что датчики вращения выполнены в виде гальваномагнитных датчиков скорости вращения с не зависящим от скорости вращения роликов уровнем выходного сигнала, частота следования которых является функцией числа оборотов роликов с магнитными метками, которые несколькими разнополярными парами расположены по периметру торцов роликов.
| РОЛИКОВАЯ ПРОВОДКА | 1991 |
|
RU2013151C1 |
| RU 2001132598 27.09.2003 | |||
| РОЛИКОВАЯ ПРОВОДКА С УСТРОЙСТВОМ ДЛЯ КОНТРОЛЯ ВРАЩЕНИЯ РОЛИКОВ | 2001 |
|
RU2221658C2 |
| US 4790164 A 13.12.1988 | |||
| Блок электропитания с пневмоприводом для горной машины | 1978 |
|
SU740967A1 |
| Автоматическое крановое распределительное устройство для поршневых гидравлических машин | 1944 |
|
SU66288A1 |

