Изобретение относится к системе привода для размещения в тесных помещениях с приводным двигателем компактного выполнения, с ведущим шкивом меньшего диаметра с двойным обвиванием каната через контршкив и канатной подвеской, по меньшей мере, 2:1.
Приводы ведущего шкива с двойным обвиванием каната, при которых приводной двигатель с ведущим шкивом и контршкивом установлены в общем пространстве для приводного механизма или также в раздельных пространствах, известны. Под приводным двигателем в дальнейшем следует понимать как приводной двигатель без встроенного редуктора, так и двигатель с прифланцованным редуктором.
В качестве опорной конструкции между подшипниками ведущего шкива и подшипниками контршкива возможны стальные конструкции, например, согласно европейской заявке EP 0100072 А2. При очень больших приводах опорной конструкцией может быть также расположенное между ведущим шкивом и контршкивом потолочное перекрытие шахты, как описано, например, в немецкой заявке DE 2441992 А1.
При использовании очень малых пространств для приводных механизмов, например, если пространство для приводного механизма в виде по вертикали (вид сверху) соответствует поперечному сечению шахты, или, по меньшей мере, две стенки шахты продолжаются по вертикали в пространство для приводного механизма, при указанных выше приводах с традиционными, имеющими продольную конструкцию приводными двигателями, длина которых больше их диаметра, имеются большие трудности в отношении площадей.
В таком случае предлагается привод в компактном выполнении, длина которого в осевом направлении короче его диаметра (Патент США US 5018603). Благодаря своей компактной конструкции он позволяет оптимально использовать пространство между расстоянием системы кабины и противовеса вместе с подъемниками с расположенными сзади кабины противовесами. Согласно указанному патенту США US 5018603 ведущий шкив перекрывает конструктивные узлы приводного двигателя, благодаря чему привод становится экстремально плоским. Разумеется, это идет за счет диаметра ведущего шкива. Диаметр ведущего шкива больше диаметра приводного двигателя. Так как момент вращения все же увеличивается пропорционально квадрату диаметра ведущего шкива, эта конструкция требует очень сильного приводного двигателя, поскольку описанный приводной двигатель не имеет редуктора и приводится в действие с подвеской кабины 1:1.
В основе изобретения лежит задача создать простое в отношении монтажа, с большим сроком службы приводное устройство для размещения в тесных помещениях, причем дополнительно особое значение придается простой, экономичной и легко доступной установке привода и кабины.
Задача согласно изобретению решается с помощью признаков п.1 формулы изобретения. Предпочтительные улучшенные варианты выполнения изобретения приводятся в зависимых пунктах формулы изобретения.
Сконструированный в узком варианте приводной двигатель в сочетании с меньшим по диаметру ведущим шкивом - всегда относительно диаметра приводного двигателя - и контршкивом для двойного обвивания канатом ведущего шкива создает возможность реализовать в целом очень небольшой привод с малым потреблением энергии и относительно щадящей нагрузкой на канат. В частности, для больших высот перемещения и больших скоростей движения двойное обвивание ведущего шкива и связанная с этим повышенная несущая способность дает большие преимущества. При этом можно отказаться от обычных канавок с «поднутрением» или с «клиновым пропилом» в пользу «полукруглых» канавок в ведущем шкиве, что дает большие преимущества для срока службы каната и собственно ведущего шкива. Кроме того, канатный привод с двойным обвиванием без проблем можно подогнать к любому желательному расстоянию системы между кабиной и противовесом.
На основе, по меньшей мере, 2:1 подвески кабины и противовеса в дополнение к расположению контршкива для двойного обвивания ведущего шкива возможно выполнение особенно небольших конструкций для расположения привода с экономией места в машинном отделении. Также без пропилов в канавках ведущего шкива или клинового пропила канавок достигается высокое приводное усилие при малом диаметре ведущего шкива. Конструкция меньшего в диаметре ведущего шкива относительно диаметра приводного двигателя позволяет, в частности, при подвеске 2:1, 3:1 или 4:1, применение более тонких канатов для одинаковых полезных грузов. Применение более тонкого каната опять же оказывает на длину в осевом направлении ведущего шкива такое воздействие, что, несмотря на двойное число канавок вследствие двойного обвивания, длина ведущего шкива и тем самым конструктивная длина всего привода, тем не менее, остается относительно небольшой. При применении 4 или более тонких канатов увеличивается срок службы каната, дополнительно еще благодаря тому, что при большем растяжении одного каната по сравнению с дополнительными канатами другие канаты должны принять на себя относительно меньшую часть общего усилия. Точно так же повышается срок службы ведущего шкива, контршкива и направляющих роликов, так как полезная нагрузка распределяется на большее количество канатов и тем самым канавок.
Требуемые при подвеске кабины, по меньшей мере, 2:1 крепления концов канатов и/или дополнительные направляющие ролики в другом варианте выполнения изобретения расположены вместе с приводом на общей раме основания. Привод (состоящий из конструируемого в узком варианте приводного двигателя с редуктором или без редуктора, клеммовой коробки, тормозного устройства и ведущего шкива), контршкив, рама основания, точки крепления и/или дополнительные направляющие ролики образуют совместно модуль системы. Собственно рама основания снабжена ножками или специальными подавляющими колебания подкладками. Модуль системы согласно изобретению включает в себя, таким образом, все машинно-технологическое оборудование, за исключением канатов. Монтаж можно осуществить путем простой установки в пространстве для приводного механизма без каких-либо крепежных средств для рамы основания. Это является возможным, так как в этом модуле системы без дополнительных юстировочных работ сумма всех действующих по горизонтали статических и динамических усилий примерно равна нулю, и, таким образом, не последует никаких смещений модуля системы на площади его установки.
Модуль системы благодаря этому может монтироваться особенно простым способом. С помощью подъемного механизма модуль системы вводится в машинное отделение без проведения работ по закреплению. Рама машины покоится на своих, предпочтительно резиновых, подкладках устойчиво, без возможности опрокидывания и сдвига. Нужно лишь закрепить концы соответственно заправленной ветви каната в заданных точках крепления на раме машины. Это осуществляется обычно при применении нагруженных резиной или пружиной тяг, на концах которых находятся ушки для каната. Альтернативно при подвеске 3:1 ветвь каната направляется через дополнительные, уже расположенные в раме основания направляющие ролики.
Благодаря относительно узкой в целом конструкции модуля системы становится возможным оптимально использовать пространство между расстоянием системы от кабины и противовеса для подъемников и противовесом, расположенным сзади кабины, за счет чего наряду с собственно установкой модуля системы становится возможным требуемый предписаниями обход вокруг машины. Этот обход обеспечен без проблем с трех сторон. Благодаря этому для помещения для размещения приводного механизма не нужно никакой площади основания большего размера, чем площадь, заданная шахтой подъемника.
В одном варианте выполнения изобретения противовес направляется не между задней стенкой кабины и задней стенкой шахты, а между боковыми стенками кабины и шахты. Соответственно направляющий ролик кабины и направляющий ролик противовеса повернуты на 90°. Благодаря этому, исходя из того, что и в шахте, и в кабине имеются двери с двух сторон, становится возможным доступ с обеих сторон и при необходимости проход через кабину.
В одном проявлении изобретения рама основания для лучшей транспортировки разделена на одну часть с приводом и контршкивом, а также часть с креплениями каната и/или дополнительными направляющими роликами. Благодаря этому облегчаются монтажные работы при проблематичных конструктивных условиях.
Согласно другой модификации изобретения привод в целях повышения допустимой статической нагрузки и тем самым общей массы комплексного подъемника рядом с ведущим шкивом оснащен наружным подшипником.
Далее, согласно предпочтительному варианту выполнения свободное пространство между местами соединений концов каната или/и дополнительными направляющими роликами может использоваться для установки прибора для управления двигателем, а также оптимально использоваться для управляющего устройства для подъемника. Прибор для управления двигателем в дальнейшем развитии идеи изобретения может стать компонентой модуля системы и в этом отношении также монтироваться и устанавливаться на заводе.
В другом проявлении изобретения участки ветви каната проходят к кабине и к противовесу со скосом относительно вертикали, а именно таким образом, что в сумме снова получаются общие вертикальные результирующие усилия как для кабины, так и для противовеса.
Изобретение следует пояснить более подробно на основе примера выполнения. В относящихся к нему чертежах показывают:
Фиг.1 - модуль системы для направления противовеса между задней стенкой кабины и задней стенкой шахты с двойным обвиванием и подвеской 2:1, вид спереди;
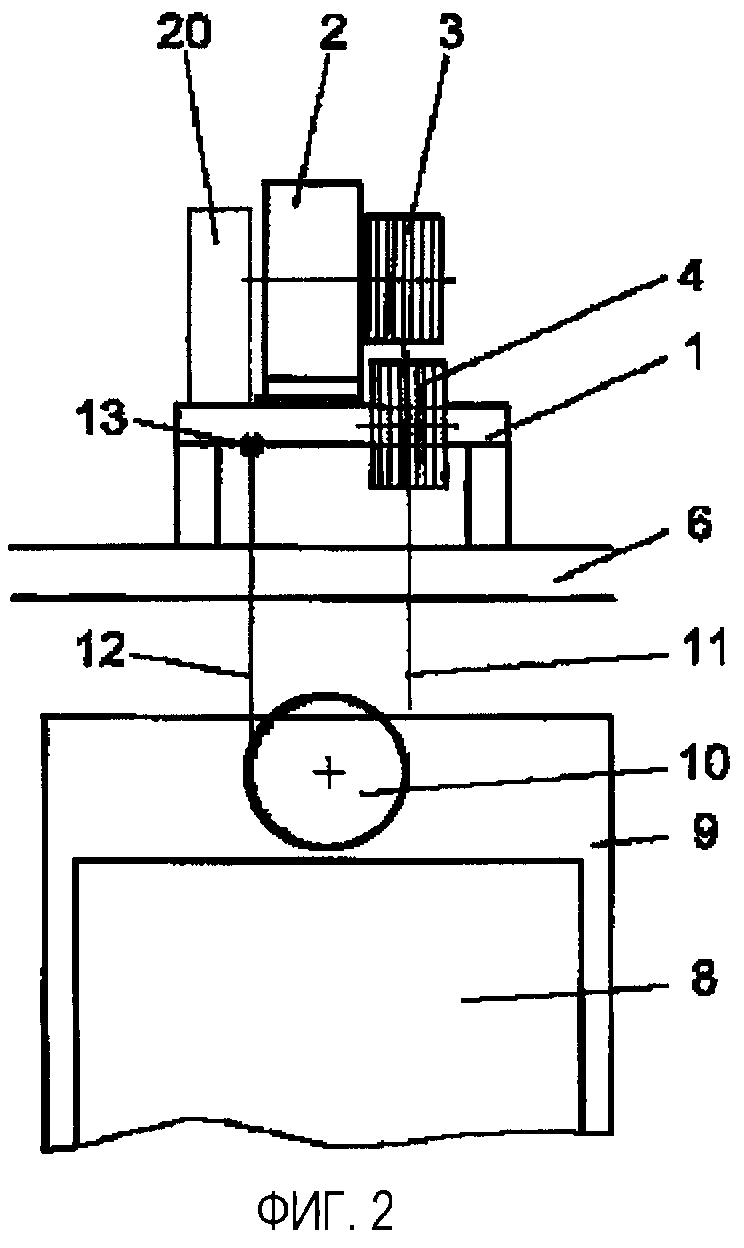
Фиг.2 - тот же самый модуль системы, вид сбоку,
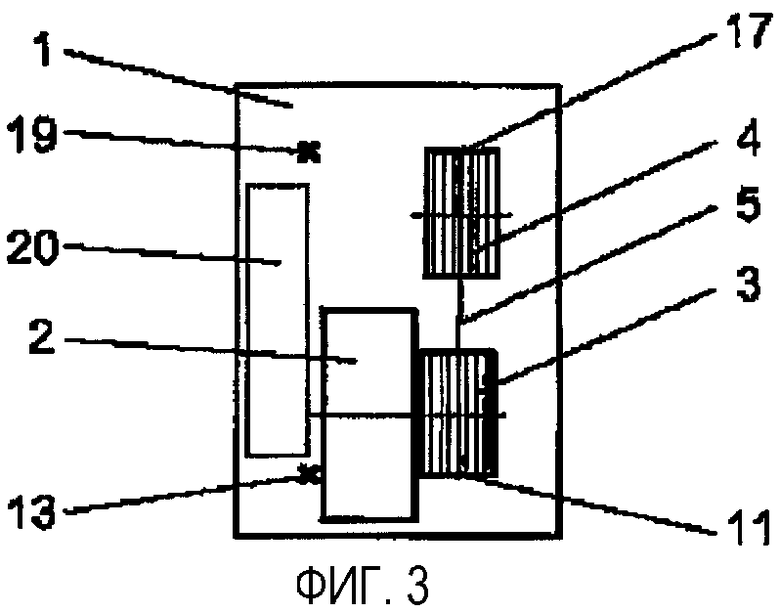
Фиг.3 - тот же самый модуль системы, вид сверху пространства для приводного механизма,
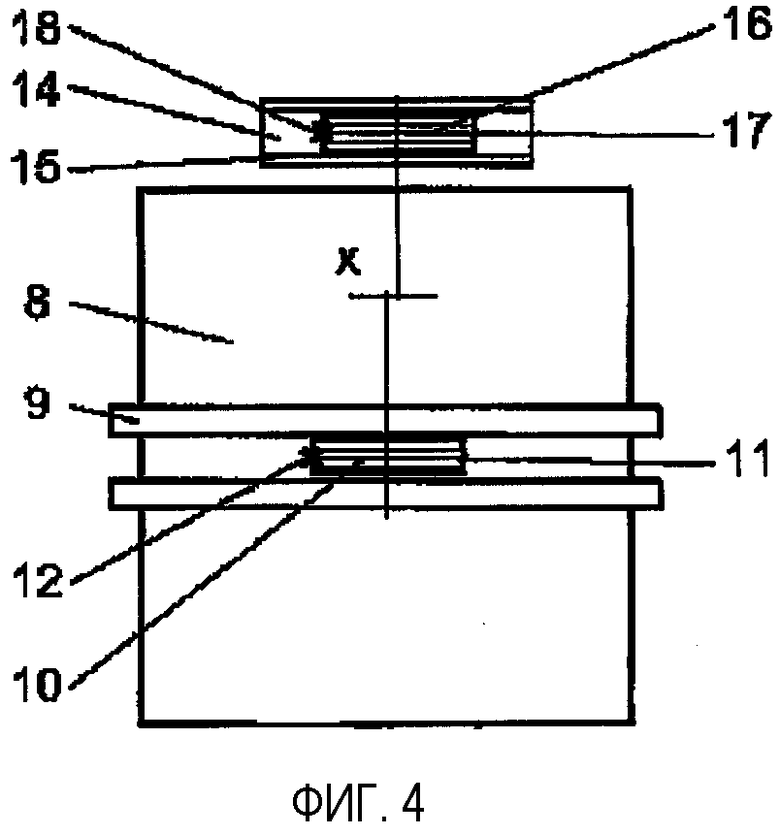
Фиг.4 - тот же самый модуль системы, вид сверху кабины и противовеса,
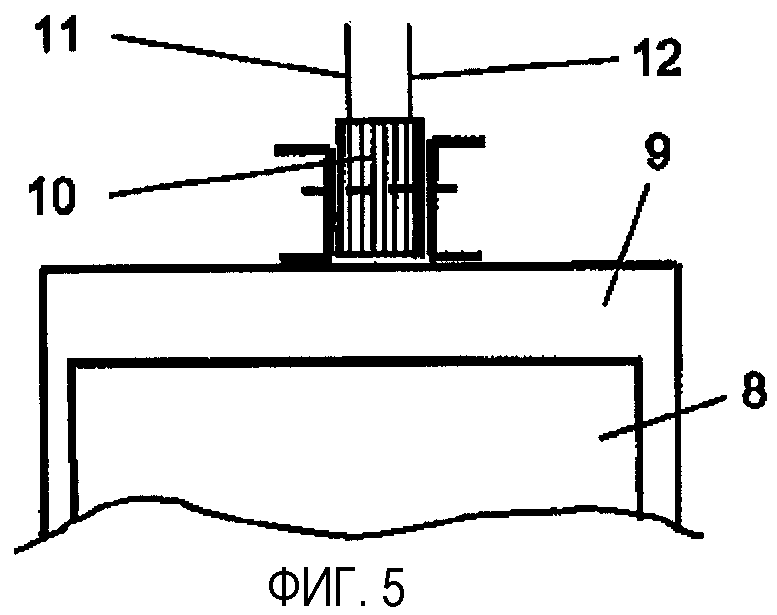
Фиг.5 - модуль системы для проходящего сбоку кабины противовеса, вид сбоку,
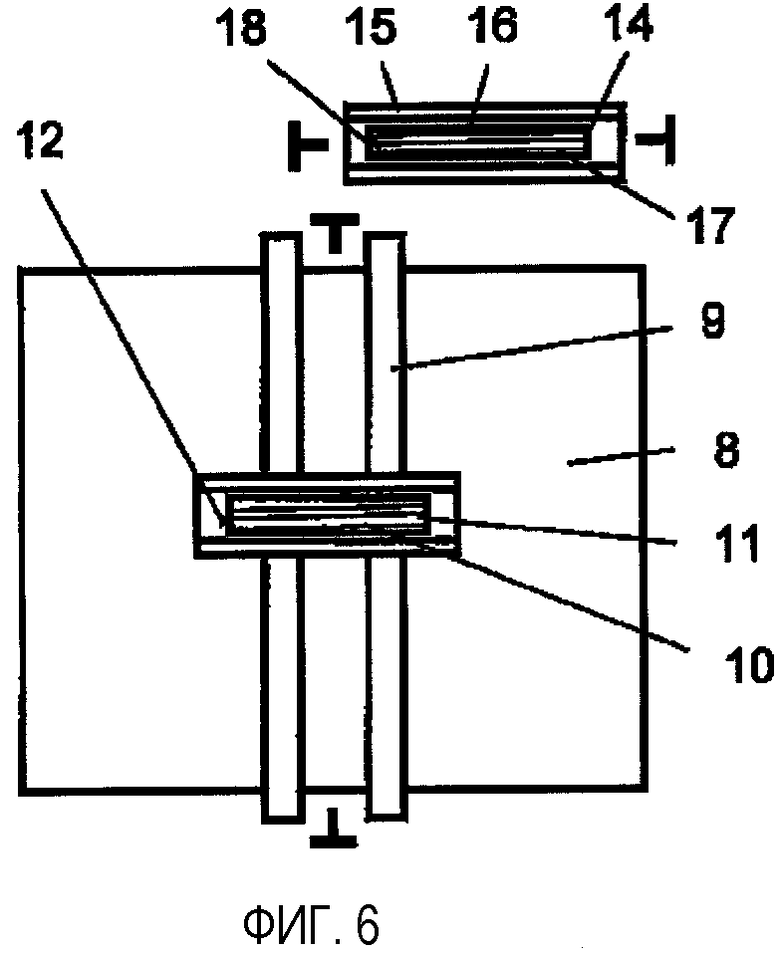
Фиг.6 - модуль системы согласно фиг.5, вид сверху кабины и противовеса,
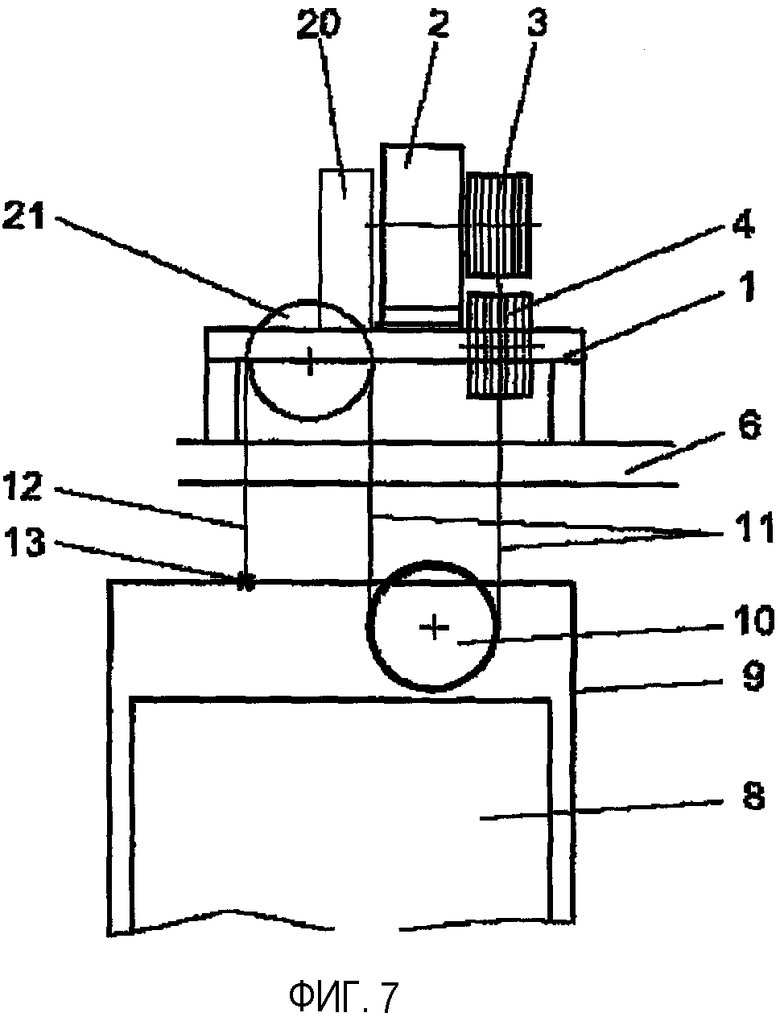
Фиг.7 - модуль системы для проходящего с задней стороны направления противовеса с двойным обвиванием и подвеской 3:1, вид сбоку,
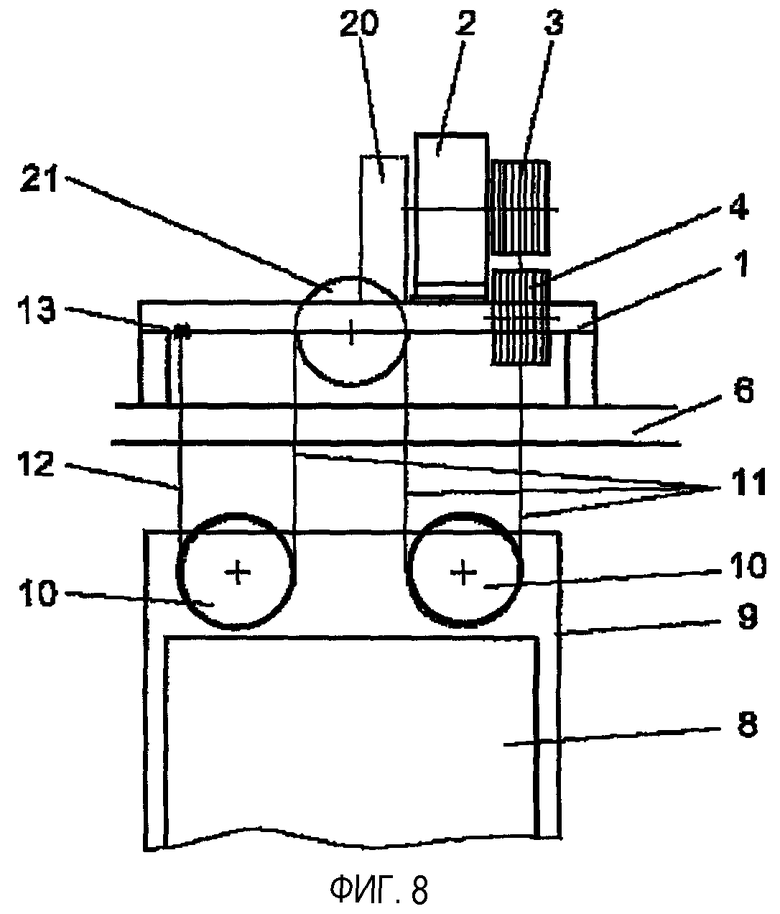
Фиг.8 - модуль системы для проведения противовеса с задней стороны с двойным обвиванием и подвеской 4:1, вид сбоку.
На фиг.1 схематически изображен модуль системы с двойным обвиванием и подвеской 2:1, вид спереди. На раме 1 основания смонтирован приводной двигатель 2, который приводит в движение связанный с геометрическим замыканием с ротором приводного двигателя 2 ведущий шкив 3. Ведущий шкив имеет диаметр меньше, чем диаметр приводного двигателя. Приводной двигатель либо не имеет редуктора, либо он включает в себя редуктор, например, в виде планетарной передачи. На раме основания сидит, далее, контршкив 4 для двойного обвивания ведущего шкива 3 ветвью круглых канатов 5. Согласно фиг.1 ведущий шкив 3 и контршкив 4 установлены со смещением по вертикали, а именно контршкив 4 расположен на раме 1 основания под ведущим шкивом 3 или приводным двигателем 2. Можно, однако, выбрать также размещение ведущего шкива 3 и контршкива 4, в основном, по горизонтали. Осевое расстояние между ведущим шкивом 3 и контршкивом 4 по горизонтали, т.е. межцентровое расстояние между канатом 5 для кабины и противовеса, выбирают в соответствии с диаметром ведущего шкива 3 и контршкива 4, а также в зависимости от расстояния системы от кабины и противовеса. Тем самым не требуется никакого направляющего ролика в дополнение к контршкиву 4. Рама 1 основания вместе со смонтированным заводом на раме 1 основания приводом (приводной двигатель 2, ведущий шкив 3, тормозное устройство, клеммовая коробка и другие принадлежности), а также с уже смонтированным на заводе контршкивом 4 с помощью подъемного механизма устанавливается на потолке 6 шахты подъемника, у которой на фиг.1 частично обозначена задняя стена 7. В потолке 6 шахты находятся проемы для направляемых к кабине 8 и от кабины 8 участков 11, 12 ветви каната и направляемых к противовесу 14 и от противовеса 14 участков 17, 18 ветви каната 5.
Кабина 8 примерно симметрично охвачена рамой 9 кабины. Симметрия «симметричной подвески» зависит, по существу, от центра тяжести ненагруженной кабины 8. Этот центр тяжести может колебаться, например, за счет веса используемой двери кабины.
Сверху в раме кабины расположен направляющий ролик 10 кабины для подвески, по меньшей мере, 2:1 («верхняя обойма»). Между задней стенкой кабины 8 и стенкой 7 шахты движется охваченный рамой 15 противовеса противовес 14. Сверху в раме 15 противовеса установлен направляющий ролик 16 противовеса. Межцентровое расстояние между участками 11, 12 ветви каната и участками 17, 18 ветви каната образует расстояние системы от кабины 8 и противовеса 14.
Ветвь 5 каната одним своим концом (участок 12 ветви каната) обычным способом прикреплена к находящемуся на стороне кабины месту 13 крепления конца каната к раме 1 основания. В раме 1 основания для этого уже на заводе предусмотрены все необходимые меры. Отходя от участка 12 ветви каната, ветвь 5 каната обвивает направляющий ролик 10 кабины, в виде участка 11 ветви каната движется снова вверх, направляется через ведущий шкив 3 к контршкиву 4, обвивает контршкив 4, возвращается обратно к ведущему шкиву 3 и обвивает его во второй раз, направляется снова к контршкиву 4 и перемещается от него в виде участка 17 ветви каната к направляющему ролику 16 противовеса, обвивает направляющий ролик 16 противовеса и, наконец, направляется снова вверх к месту 19 крепления конца каната на раме 1 основания на стороне противовеса 14. Оба конца ветви 5 каната, таким образом, прикреплены на раме 1 основания к заданным еще на заводе местам креплений концов каната. Тем самым отпадают все крепежные и юстировочные работы в самой шахте, и крыша машинного отделения не должна быть рассчитана на несение нагрузок от кабины, противовеса и канатов. Из вида спереди можно понять, что слева от рамы 1 основания, если смотреть по вертикали в направлении кабины 8, имеется достаточно места для обслуживающего персонала для обхода с трех сторон, без необходимости удлинения машинного отделения на этой стороне за пределы шахты.
На фиг.2 схематически представлен тот же модуль системы, что и на фиг.1, вид сбоку. Те же символы обозначают - как и в последующих чертежах - соответственно те же конструктивные узлы.
Показана рама 1 основания с узким приводным двигателем 2, относительно узкий ведущий шкив для двойного обвивания и контршкив 4. Кроме того, на раме 1 основания согласно изобретению и в зависимости от соотношений площадей непосредственно рядом с приводным двигателем 1 установлен прибор 20 для управления двигателем и/или управляющее устройство для подъемника, например, также статический преобразователь. На раме 1 основания можно видеть место 13 крепления конца каната на стороне кабины. Прикрепленный к этому месту 13 крепления для закрепления конца каната участок 12 ветви каната направляется через проем в потолке 6 шахты к расположенному на раме 9 кабины для кабины 8 направляющему ролику кабины, обвивает этот направляющий ролик 10 кабины и, продолжаясь в виде участка 11 ветви каната, направляется к ведущему шкиву 3 привода. Дальнейшее движение каната подробно описано в пояснениях к фиг.1.
Из боковой проекции видно, что справа и слева от рамы 1 основания, если смотреть в направлении вертикальной оси кабины 8 или рамы 9 кабины, несмотря на установку дополнительного прибора 20 управления двигателем и/или управляющего устройства для подъемника имеется достаточно места для обхода с трех сторон без необходимости продления машинного отделения на этой стороне за пределы шахты.
Из фиг.3, которая схематически показывает вид сверху того же модуля системы, можно еще более ясно распознать меньшую занимаемую площадь для рамы 1 основания, которая несет на себе в качестве модуля системы приводной двигатель 2 с присоединенным с геометрическим замыканием ведущим шкивом 3, установленный непосредственно на раме 1 основания контршкив 4, места креплений 13,19 концов каната для участков 11,17 ветви 5 каната и прибор 20 управления двигателем и/или управляющее устройство для подъемника.
В сравнении с этим фиг.4 показывает схематически для того же приводного устройства вид сверху кабины 8 и противовеса 14 внутри непоказанных стенок шахты. На верхней стороне рамы 9 кабины можно видеть установленный там направляющий ролик 10 для кабины с участками 11, 12 ветви каната, ведущими к кабине 8 и от кабины 8, и на верхней стороне рамы 15 противовеса установленный там направляющий ролик 16 для противовеса с участками 17, 18 ветви каната, ведущими к противовесу 14 и от противовеса 14. Символом χ обозначено расстояние смещения в осевом направлении между направляющим роликом 10 кабины и направляющим роликом 16 противовеса. Это смещение зависит от центра тяжести пустой кабины 8 и расположения противовеса 14 в шахте. Кабина 8 и противовес 14 подвешены в центре тяжести или вблизи своих центров тяжести, и ветви 11, 12, 17 и 18 каната движутся на установленном еще на заводе расстоянии системы от кабины 8 и противовеса 14 примерно под прямым углом или соответственно с наклоном под одним и тем же противолежащим углом и, таким образом, с перпендикулярной результирующей. Благодаря этому становится возможным устанавливать раму 1 основания без применения каких-либо мер для ее закрепления на потолке 6 шахты в машинном отделении. Кроме того, на не показанные здесь направляющие рельсы для рамы 9 кабины и рамы 15 противовеса не воздействуют или воздействуют очень малые моменты, благодаря чему при движении одновременно снижаются потери на трение.
В остальном также предусмотрено не показанное на чертеже смещение на половину диаметра каната в направлении движения ведущего шкива 3 и контршкива двойного канатного обвивания. Доступ в кабину односторонний (спереди).
На фиг.5 и 6 в сильно схематизированном виде показан модуль системы согласно изобретению, который предусмотрен для подвешивания противовеса между боковой стенкой кабины и боковой стенкой шахты. Сами стенки шахты не показаны. Видно, что кабина 8 и рама 9 кабины по сравнению с фиг.1 и фиг.4 повернута на 90°, чтобы сделать возможным доступ в кабину с двух противоположных сторон (на фиг.6 справа и слева). Это позволяет, например, осуществлять погрузку транспортируемого груза с обеих сторон. Фиг.6 показывает вид сверху. Становится возможным, исходя из наличия в шахте и в кабине дверей с обеих сторон, сквозной проход (на фиг.6 справа налево и наоборот). Такое расположение следует предусмотреть также в зданиях, которые позволяют, например, лишь попеременный доступ к шахте на разных этажах.
Соответственно относительно кабины 8 установлен направляющий ролик 10 кабины, а направляющий ролик 16 противовеса и противовес 14 расположены с поворотом/смещением.
Разумеется, кабина и противовес могут быть подвешены в любом соответствующем четным числам соотношении, также относительно друг друга. При подвеске кабины и противовеса 3:1 согласно фиг.7 участок 13 ветви 5 каната закреплен не в месте закрепления конца каната на раме 1 основания, а в виде участка 12 ветви каната вначале направляется через дополнительный направляющий ролик 21, который установлен на раме 1 основания, и лишь после изменения направления закреплен в месте 13 крепления ветви каната на раме 9 кабины. Соответственно участок ветви каната движется от направляющего ролика для противовеса вначале через расположенный также на раме 1 основания направляющий ролик и лишь после его прохождения закрепляется в месте крепления конца каната на раме 9 противовеса. Оси/валы дополнительных направляющих роликов 21 предпочтительно лежат на одной оси, а сами направляющие ролики 21 - параллельно, на расстоянии друг от друга в пространстве сзади системы приводной двигатель-ведущий шкив 2, 3 и контршкив 4. Между или также сзади, или над обоими направляющими роликами 21 еще достаточно места для установки прибора для управления двигателем и/или управляющего устройства для подъемника. Таким образом, для пространства для приводного механизма с, например, трехсторонним доступом к приводу не требуется никакой большей площади в горизонтальной проекции, чем для самой шахты подъемника.
Все места креплений концов каната и установленные на раме 1 основания направляющие ролики предусмотрены уже на заводе в соответствии с запланированным расстоянием системы или межцентровым расстоянием между канатами подъемника, почему также при подвеске 3:1 отпадают все юстировочные работы при установке модуля системы. Также здесь осуществляется установка полностью укомплектованной рамы 1 основания без дальнейшего закрепления на потолке 6 шахты. Результирующие усилия, воздействующие на канат, действуют в вертикальном направлении, почему рама 1 основания не может сместиться в сторону.
Согласно фиг.8 можно, далее, простым способом осуществить также подвеску 4:1. Место 13 крепления конца каната для участка 12 ветви каната к кабине и точка крепления для участка ветви каната к противовесу находятся оба на раме 1 основания, как это видно из фиг.1-3. Также проходящий на стороне кабины участок 12 ветви каната, проходя от места 13 крепления конца каната на раме 1 основания, направляется через расположенный на верхней раме 9 кабины направляющий ролик 10. В дальнейшем, однако, ветвь 5 каната в виде участка 11 ветви каната отклоняется с помощью расположенного на раме 1 основания направляющего ролика 21, а также еще раз с помощью второго, расположенного на верхней раме кабины направляющего ролика 10, прежде чем ветвь 5 каната дважды обовьет ведущий шкив 3 и контршкив 4. На стороне противовеса направление ветви каната осуществляется таким же образом.
Между или также сзади, или над обоими направляющими роликами 21 на раме 1 основания снова имеется еще достаточно места для - предпочтительно проведенной на заводе - установки прибора 20 для управления двигателем и/или управляющего устройства для подъемника. Несмотря на это, обеспечивается соответствующий предписаниям трехсторонний обход вокруг машины, причем для размещения приводного механизма не требуется большей площади, чем ее предоставляет поперечное сечение шахты.
Также крепления концов каната для концов ветвей каната на раме 1 основания и расположенные на раме 1 основания, на раме 9 кабины и на раме противовеса направляющие ролики установлены уже на заводе в соответствии с запланированным расстоянием системы или межцентровым расстоянием между канатами подъемника, почему также при подвеске 4:1 отпадают все юстировочные работы для установки модуля системы. Также здесь осуществляется установка полностью укомплектованной рамы 1 основания без дальнейшего закрепления на потолке 6 шахты. Все силы, воздействующие на канат, согласно результирующему направлению ветвей каната действуют по вертикали, почему рама 1 основания не может сместиться в сторону. Так же как и в других случаях подвески, на направляющие рельсы для рамы 9 кабины и направляющие рельсы для рамы противовеса не действуют никакие или действуют пренебрежимо малые моменты, и возникающие при движении силы трения сводятся к минимуму.
Однако также возможно для противовеса выбрать большее понижающее соотношение, чем для кабины, если дело заключается в том, чтобы максимальный момент вращения приводной машины снизить за счет массы противовеса или создать свободное пространство в головной части шахты за счет уменьшенного пути для противовеса.
Модуль системы во всех вариантах выполнения можно разделить для осуществления более удобной транспортировки и лучшего монтажа. Предпочтительно разделение осуществляется через раму 1 основания на одну часть с приводом 2, 3 и контршкивом 4, а также на другую часть с креплениями 13, 19 концов каната или/и при необходимости дополнительными направляющими роликами. Обе части модуля системы можно установить с их рамами основания по отдельности рядом друг с другом или соединенными без любого последующего крепления на потолке 6 шахты.
Кроме того, привод 2, 3 для повышения допустимой статической нагрузки и тем самым общей массы укомплектованного подъемника может быть оснащен не описанным более подробно выносным подшипником рядом с ведущим шкивом 3.
Далее, согласно особенно предпочтительному дальнейшему развитию идеи изобретения свободное пространство между местами закреплений 13, 19 концов каната или/и дополнительными направляющими роликами 21 можно использовать для установки прибора 20 для управления двигателем, а также для управляющего устройства для подъемника.
Подвеска 3:1 или 4:1 также возможна для конструкций с противовесом, проходящим сбоку.
Для высот транспортировки, начиная примерно с 30 м, скоростей движения выше 2 м/с и полезной нагрузки до 3.200 кг канатный привод при принятой, например, подвеске кабины 2:1 может иметь следующие размеры:
- диаметр ведущего шкива, контрролика и направляющего ролика (роликов) 320-500 мм;
- диаметр каната круглого сечения 8-12 мм;
- число канатов круглого сечения 4-6.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕЗРЕДУКТОРНЫЙ ЛИФТ С ТРОСОВЫМ ПРИВОДОМ | 2001 |
|
RU2278812C2 |
| СПОСОБ УПРАВЛЕНИЯ И КОНТРОЛЯ РАБОТЫ ЛИФТОВОЙ УСТАНОВКИ | 1996 |
|
RU2161117C2 |
| САМОНЕСУЩАЯ КАБИНА ЛИФТА | 2008 |
|
RU2472694C2 |
| ПОДЪЕМНИК С ТРУБЧАТЫМ ДВИГАТЕЛЕМ И РАЗДЕЛЬНЫМ КРЕПЛЕНИЕМ ДВИГАТЕЛЯ | 2014 |
|
RU2679791C2 |
| ГРУЗОПОДЪЕМНАЯ СИСТЕМА (ВАРИАНТЫ) | 2006 |
|
RU2459762C2 |
| ЛИФТОВАЯ СИСТЕМА И СПОСОБ ЕЕ УСТАНОВКИ И МОДИФИКАЦИИ | 2009 |
|
RU2504512C2 |
| ЛИФТОВАЯ УСТАНОВКА | 2007 |
|
RU2441832C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОНТАЖА ЛИФТА | 1998 |
|
RU2196096C2 |
| ПОДЪЕМНИК АВТОМОБИЛЕЙ | 2000 |
|
RU2169692C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ АВАРИЙНОГО ТОРМОЖЕНИЯ ИЛИ УЛАВЛИВАНИЯ ТИПА ISG | 2006 |
|
RU2403202C2 |
Изобретение относится к области машиностроения, а именно к системам привода для размещения в тесных помещениях с приводным двигателем компактного выполнения. Система привода имеет компактно сконструированный приводной двигатель, ведущий шкив меньшего диаметра с двойным обвиванием через контршкив и канатную подвеску кабины. Привод вместе с контршкивом и креплениями концов каната или/и дополнительными направляющими роликами на стороне кабины и противовеса смонтированы на общей раме основания. Рама основания установлена на потолке отделения приводного механизма с использованием или без использования упругих подкладок и без всякого закрепления на потолке помещения для приводного механизма. Ведущий шкив и контршкив установлены на таком расстоянии относительно друг друга, что нисходящие ветви каната одновременно соответствуют обусловленному системой межцентровому расстоянию от кабины до противовеса. При этом модуль системы разделен через раму на часть с приводной машиной и контршкивом, а также на часть с креплениями концов каната или/и дополнительными направляющими роликами. Противовес направлен между задней стенкой шахты и задней стенкой кабины или между боковой стенкой шахты и боковой стенкой кабины в зависимости от доступности кабины. Достигается упрощение конструкции приводного устройства и увеличение срока службы. 8 з.п. ф-лы, 8 ил.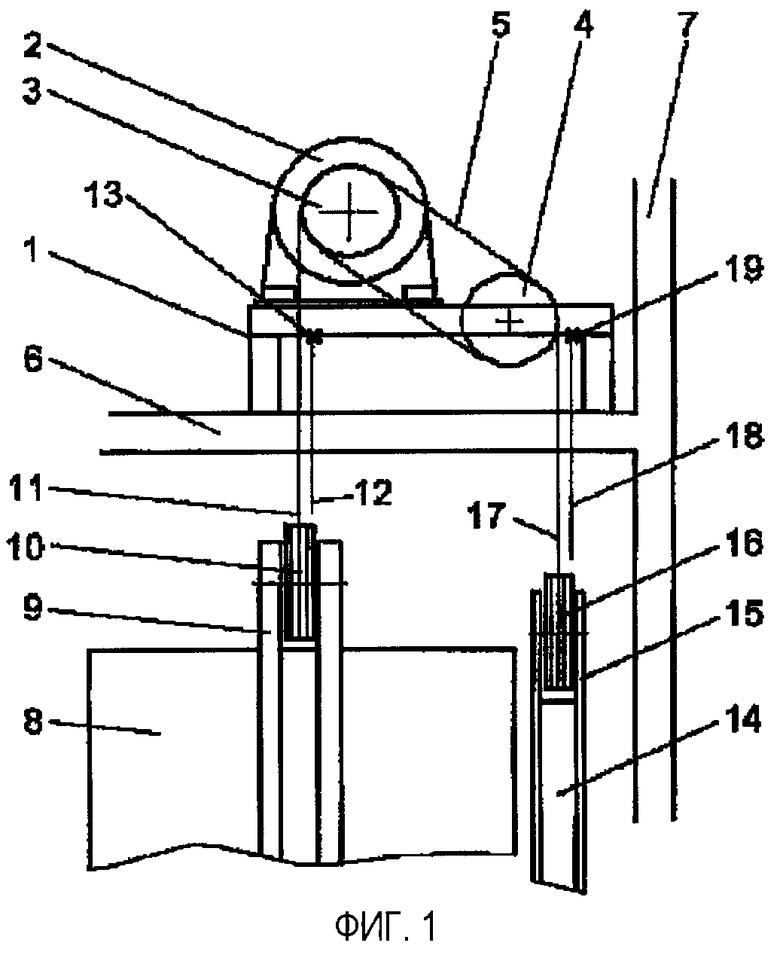
| Вибрационный питатель | 1973 |
|
SU578237A1 |
| DE 10205170 А1, 28.08.2003 | |||
| Способ получения быстро твердеющего гидравлического вяжущего | 1952 |
|
SU100072A2 |
| DE 10164548 А1, 12.09.2002 | |||
| RU 2066291 C1, 10.09.1996. | |||

