Изобретение касается способа управления и контроля за работой лифтовых установок. Предметом изобретения, кроме того, является подшипник качения, применяемый для этого способа.
Уровень техники
Управление лифтовыми установками должно отвечать двум требованиям. С одной стороны, управление работой должно происходить соответственно сигналам, подаваемым пользователем, причем могут также применяться специальные программы движения, с другой стороны, необходимо постоянно следить за безопасностью работы, к чему в первую очередь относится контроль за закрытым состоянием дверей, контроль за скоростью движения и защита от перегрузки.
Такие управление и контроль предполагают получение и обработку определенных входных данных, которые должны постоянно определяться во время работы. Обычно это происходит с помощью устройств по управлению и контролю, которые обеспечивают обработку и оценку временных и путевых данных о рабочем процессе. При этом речь в основном идет о том, чтобы по возможности точно получать данные о положении кабины лифта или о его движении в шахте и соответственно останавливать в заданной позиции.
Получение данных о положении кабины подъемника или о ее движении в шахте происходит обычно с помощью механических приспособлений, таких как копировальные управляющие устройства или непосредственно соединенные с кабиной ленты, канаты и т.п., через которые возможно осуществлять непосредственно контрольную функцию. Однако применение таких систем ограничено при больших скоростях движения и большой высоте подъема из-за параметров этих механических конструкций.
Известны также другие конструкции датчиков данных, которые преобразуют вращательное движение фрикционных соединений, ременных приводов, цепных приводов или других видов передач в импульсы или аналоговые напряжения, служащие в качестве вводимых данных для управления. При этом речь идет об устанавливаемых приспособлениях с дополнительными приборами, которые большей частью подвержены некоторой пробуксовке и тем самым не позволяют, например, обеспечить непосредственное конечное выключение при остановке. В результате становятся необходимыми дополнительные отключающие и соответственно переключающие устройства или дублирование относительно дорогих систем.
Сущность изобретения
Изобретение имеет целью упростить управление и контроль за лифтовыми установками таким образом, чтобы исключить или сократить до минимума получение данных, вводимых механическим путем.
Поставленная задача решена совокупностью признаков, изложенных в формуле изобретения, т.е. путем создания способа управления и контроля лифтовой установки, согласно которому данные о состоянии поворотного смещения элементов, вращающихся относительно друг друга, считывают импульсными датчиками, и получаемые импульсные данные преобразуют с помощью вычислительного устройства. Данный способ характеризуется прежде всего тем, что импульсные датчики встраивают в подшипники приводного двигателя и/или канатного шкива, соединенного с этим двигателем, и/или направляющего ролика, связанного с ветвью каната, несущего противовес, и/или направляющего ролика кабины, взаимодействующего с направляющим рельсом шахты, и/или одного из направляющих роликов каната устройства ограничения скорости, и/или привода дверей, и/или привода блокирующего устройства дверей.
Таким образом, изобретение основывается на том, что в лифтовых установках имеется большое число вращающихся приводов для приведения в действие различных групп элементов конструкции, в особенности в кабинах лифтов, а также в дверях кабин и шахт. Вращающиеся части таких вращающихся приводов, например валы приводных двигателей или части передач, при этом, как правило, устанавливаются на подшипниках. В результате смещение положения вращающейся части, будь оно статическим или динамическим, передает значение, соответствующее статическому или динамическому состоянию приводимого элемента.
Например, привод кабины лифта осуществляется канатным шкивом, через который проходит несущий трос. Если подсчитывается число оборотов канатного шкива, то каждая отдельная считываемая величина будет соответствовать определенному положению кабины в шахте. Если же замеряется скорость оборота канатного шкива, то это будет величина, отражающая скорость движения кабины.
Подшипники со встроенными импульсными датчиками известны, например, из европейской заявки ЕР 0631140 A1, где на вращающемся кольце подшипника установлен кодировщик в форме кольца из магнитного материала, у которого намагничены северный и южный полюса, создающие синусоидальное магнитное поле. На одной из сторон неподвижного кольца подшипника находится чувствительный элемент с электрическим контактом, в котором при вращении магнитного кольца производятся импульсы. Число импульсов, производимых за один оборот, соответствует числу полюсов, находящихся на магнитном кольце. Посредством подсчета импульсов соответствующей обрабатывающей схемой можно вычислить число оборотов и соответствующее угловое положение вращающейся части. Частота импульсов при вращении является мерой скорости вращения.
Применение подобных подшипников открывает широкие возможности для управления и контроля за лифтовыми установками. Так, при определении скорости движения кабины может использоваться импульсный датчик, встроенный альтернативно в один из подшипников:
приводного двигателя,
канатного шкива,
направляющего ролика, связанного с ветвью каната, несущего противовес,
одного из направляющих роликов каната, ограничивающего скорость, или направляющего ролика кабины, взаимодействующего с направляющим рельсом шахты.
При определении скорости кабины в последнем случае предпочтительно используют не менее двух импульсных датчиков, встроенных в подшипники разных направляющих роликов кабины, взаимодействующих с направляющим рельсом шахты, а полученные значения сравнивают и усредняют.
Таким же образом, как скорость кабины, можно установить и ее положение в шахте путем пересчета числа импульсов по меньшей мере от одного из упомянутых ранее импульсных датчиков, встроенного в соответствующий подшипник качения, в данные о пути кабины. Так как число импульсов в зависимости от опрашиваемого подшипника может быть очень большим и, следовательно, одиночный импульс будет являться мерой для очень короткого отрезка пути кабины, то может осуществляться очень точное управление движением. При этом посредством раздельного считывания данных о пути кабины, например, от направляющих роликов и канатного шкива и сравнения полученных величин можно скорректировать значения проскальзывания и удлинения каната. В предпочтительном варианте путь, пройденный кабиной, определяют по значениям импульсов по меньшей мере от одного импульсного датчика, встроенного в один из подшипников одного из направляющих роликов кабины, взаимодействующих с направляющими рельсами шахты.
По способу, предлагаемому данным изобретением, можно также осуществлять управление и контроль за работой дверей кабины и шахты лифтовых установок. Привод дверей в большинстве случаев осуществляется посредством канатных тяг с соответствующими вращающимися приводами, в которых можно установить по меньшей мере один подшипник качения с импульсным датчиком. По числу считываемых импульсов можно установить состояние открытия соответствующей двери и передать в систему управления работой и обеспечения безопасности.
В частности, положение двери кабины предпочтительно определяют при использовании не менее одного импульсного датчика, встроенного в один из подшипников привода двери кабины или привода двери шахты, и эти данные вводят в систему автоматического управления лифтовой установкой.
Аналогичным образом, состояние блокирующего устройства двери определяют при использовании не менее одного импульсного датчика, встроенного в один из подшипников привода блокирующего устройства двери, и эти данные вводят в систему автоматического управления лифтовой установкой.
Так как подшипники со встроенным импульсным датчиком имеют размеры обычных нормированных подшипников, то переоборудование существующих лифтовых установок для использования изобретенного способа управления и контроля возможно без чрезмерных затрат.
Ниже дается подробное описание изобретения на примере лифтовой установки, представленной на чертежах, на которых изображено:
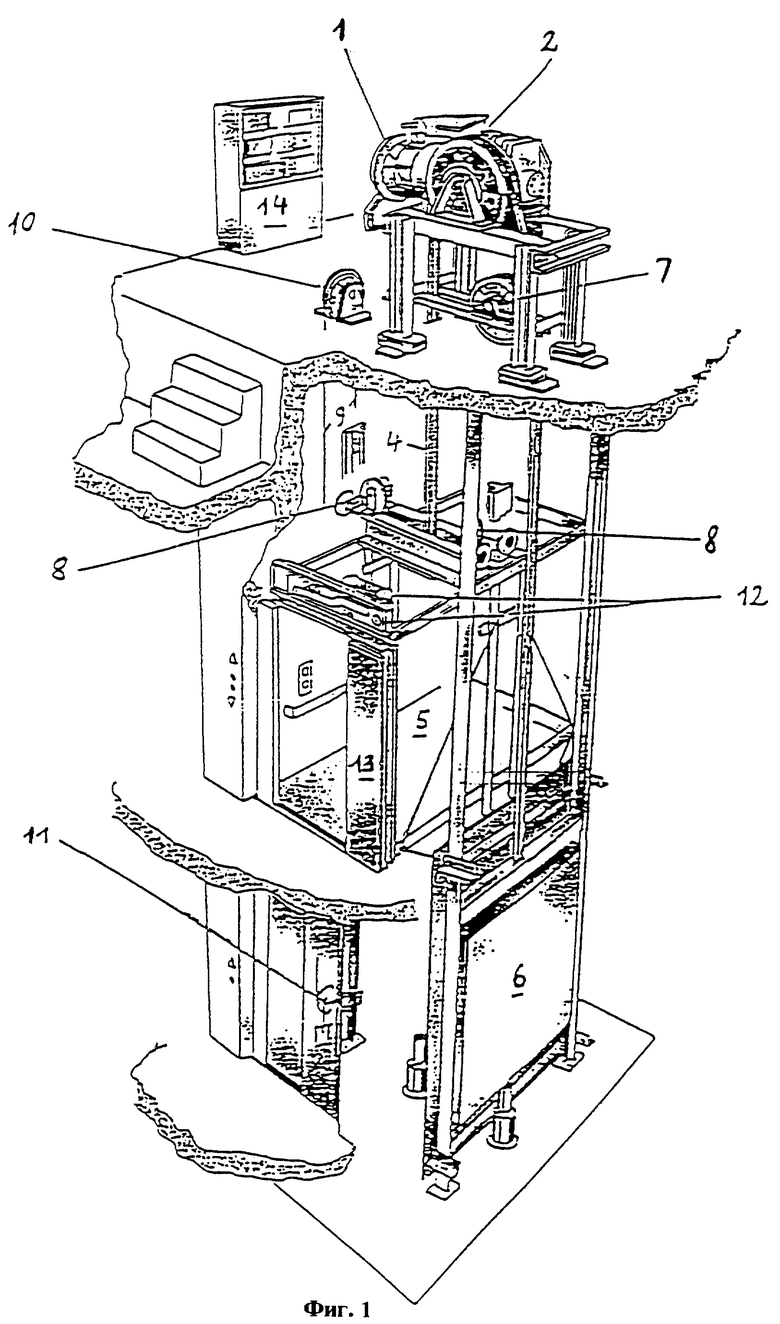
на фиг. 1 - принципиальная схема лифтовой установки;
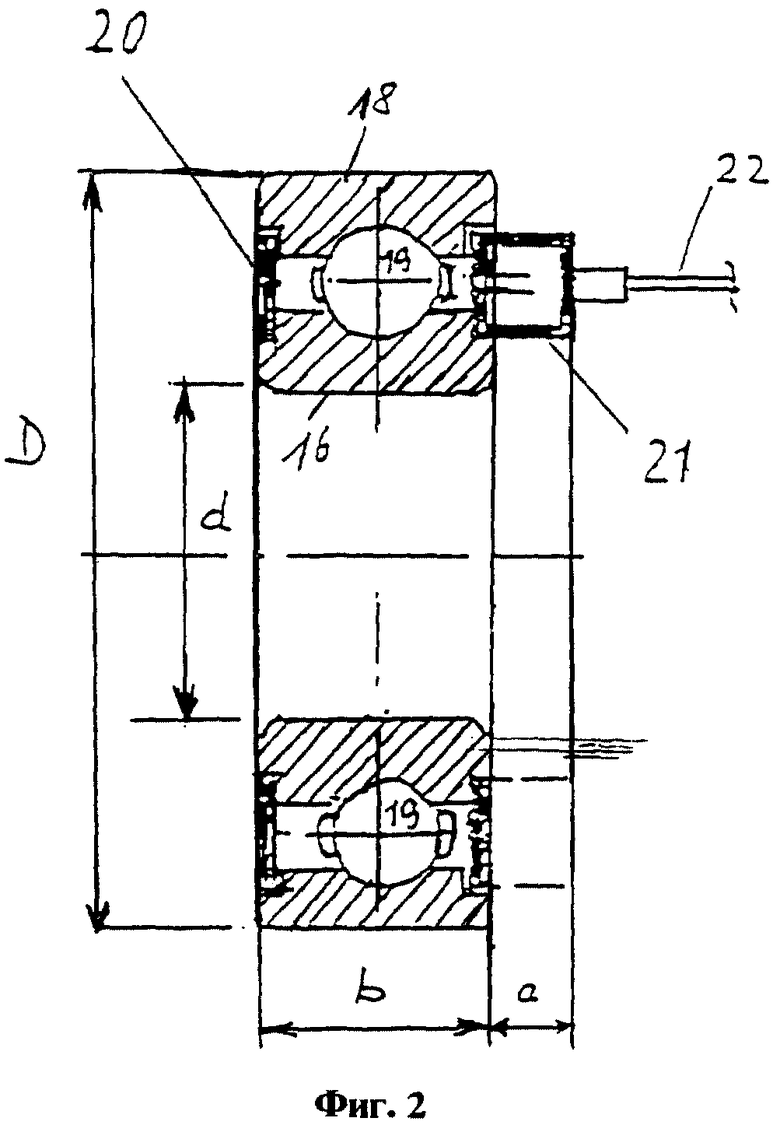
на фиг. 2 - подшипник качения, устанавливаемый в соответствии со способом согласно изобретению.
Пример конкретного выполнения
Лифтовая установка имеет установленный над верхним этажом главный приводной двигатель 1 с канатным шкивом 2, соединенным с двигателем 1 посредством передачи. Проложенные по верху параллельные канаты несут с одной стороны кабину 5, с другой стороны противовес 6, причем ветвь приводного каната, несущая противовес, проложена по направляющему ролику 7. Кабина 5 имеет с двух сторон, а также сверху и снизу направляющие ролики 8, которые прижимаются усилием пружины к направляющим шахты.
Лифтовая установка имеет также предохранительное устройство для ограничения скорости. Это устройство является независимым от привода, подвески и направляющих кабины, чтобы оно могло срабатывать даже в самом невероятном случае разрыва всех канатов или канатного крепления. Оно состоит (фиг. 1) из каната 9, который обоими концами крепится к кабине и для получения петли проходит к верхнему направляющему ролику 10 и нижнему направляющему ролику 11. Наряду с предписанной функцией сообщать о превышении скорости через контакт предохранительной цепи у известных систем скорость движения определяется посредством дополнительно встроенных приборов, таких как спидометр и или импульсный датчик.
Кабина 5 имеет приводимую механически дверь, привод которой располагается на крыше кабины, где находятся также и ролики 12 для движения двери и для привода блокирующего устройства. На каждом этаже напротив двери кабины имеется дверь шахты 13, привод которой выполнен подобным образом и для лучшей наглядности на чертеже не представлен.
Управление и контроль за всеми процессами происходит в центральном шкафу управления 14, который соединен с приводом, кабиной и зонами обслуживания шахтных дверей через не представленные на схеме электрокабели, линии управления и сигнальные линии.
Как видно из описанного выше, обычная лифтовая установка имеет большое число вращающихся элементов конструкции, таких как валы электромоторов, у канатных шкивов и канатных роликов, направляющих роликов и т.п. Эти вращающиеся части конструкции, как правило, установлены на подшипниках качения, чаще на шарикоподшипниках, причем внутреннее кольцо может быть фиксированным подшипником, а внешнее вращаться или наоборот. Эти подшипники можно использовать при установке на них импульсного датчика для управления и/или контроля за лифтовой установкой самым различным образом.
Так, подшипник вала главного приводного двигателя 1 и/или подшипник канатного шкива 2, и/или подшипник направляющего ролика 7 может служить для получения частоты импульсов и их пересчета в скорость движения с помощью вычислительного устройства, имеющегося в шкафу управления 14. Получение и обработка импульсов происходит при этом в зависимости от направления вращения.
Далее можно на одном или на обоих направляющих роликах 10 и 11 считывать частоту импульсов, поступающих от каната 9 устройства для ограничения скорости. Сравнение полученных данных друг с другом и со значениями скорости, полученными от приводной системы, дает возможность непосредственно и количественно определить появление проскальзывания каната, так что необходимые меры по регулировке могут вводиться автоматически.
Так же как и скорость кабины 5 при помощи импульсного датчика в подшипниках качения можно определить ее положение в шахте. Для этого необходимо вместо частот или дополнительно к ним считывать число импульсов и суммировать их в сумматоре в зависимости от направления. Для замера числа импульсов принципиально годятся те же подшипники, что и для замера скорости движения посредством измерения частоты импульсов. Здесь также возможно сравнение значений, получаемых от главной приводной системы, с данными устройства для ограничения скорости, чтобы скорректировать значения проскальзывания и удлинения каната.
Измерение отрезка пути посредством выбора соответствующих подшипников с импульсными датчиками и соответственно составленной программы расчета может производиться так точно, что при этом можно определить место остановки и подход к нему без использования механических контактных датчиков в шахте.
Дальнейшие возможности для измерения скорости и пути дают подшипники направляющего ролика 8, которые направляют кабину 5 по направляющим рельсам в шахте. Число и скорость оборотов этих направляющих роликов находятся в непосредственной зависимости от пути, проходимого кабиной 5, так что значения импульсов от импульсных датчиков в этих подшипниках могут быть преобразованы в данные о пути и скорости движения. Возможные неточности могут быть скорректированы, если данные будут поступать как минимум от двух направляющих роликов и разница будет устраняться.
Импульсные датчики в подшипниках направляющих роликов 8 хорошо подходят для получения значений, сравниваемых со значениями данных от главной приводной системы и предохранительного устройства.
Импульсные датчики в соответствующих подшипниках могут также служить для управления и контроля за дверями лифтового устройства. В первую очередь здесь речь может идти о подшипниках 12, предусмотренных для привода открывания и закрывания дверей, а также для приведения в действие элементов блокирующего устройства. Путем обработки замеряемых данных можно синхронизировать работу дверей кабины и шахты 13.
Общеизвестно, что большинство неисправностей лифтовых устройств касается дверей. Предлагаемый изобретением метод позволяет своевременно определить появление возможных неисправностей. Так, например, сравнивая все процессы в дверях, можно определить, от какого ролика повторно поступают импульсы другого уровня. Из этого затем можно сделать вывод о том, что либо сам подшипник, либо натяжение каната не соответствуют норме. Благодаря своевременному сообщению о такой неисправности можно провести проверку или ремонт, прежде чем появится необходимость в остановке всей установки.
Предлагаемый изобретением метод может не ограничиваться одной установкой, а может охватывать также несколько находящихся рядом или удаленных подъемников. В больших комплексах зданий можно, например, централизованно контролировать большое число лифтов.
Подшипники качения со встроенным импульсным датчиком по своим установочным размерам соответствуют обычным подшипникам. У известных подшипников качения с неподвижным внешним кольцом установочные размеры соответствуют обычным параметрам подшипников. Должно только иметься место для прокладки сигнальной проводки, идущей от чувствительного элемента. В комплексной установке, как описано выше, применяются также подшипники с обратной функцией, то есть подшипники с неподвижным внутренним и вращающимся внешним кольцом.
Подшипник такого вида показан на фиг. 2. В этом случае внутреннее кольцо 16 закреплено, а внешнее кольцо 18 вращается на шариках 19 и несет, например, направляющий ролик 8. На фиг. 2 слева изображен подшипник с уплотнительным кольцом 20. Имея такие элементы конструкции и размеры D для внешнего диаметра, d для внутреннего диаметра и b для осевой длины, этот подшипник соответствует подшипникам обычной конструкции.
На фиг. 2 справа нормальное уплотнительное кольцо заменено специальным уплотнительным кольцом 21, которое плотно прилегает к внутреннему кольцу и в которое встроен чувствительный элемент для приема сигналов. Этот чувствительный элемент воспринимает индуктивные импульсы магнитного кольца, которое вращается вместе с внешним кольцом подшипника 18. Импульсы передаются через сигнальный провод 22 на шкаф управления 14. Таким образом, подшипник по сравнению с размерами обычных подшипников увеличен только на размер а. Эта часть увеличенной осевой длины подшипника, как правило, не находится в зоне фиксации подшипника внутри конструкции и поэтому может использоваться для приема сигналов и для электрического контакта.
При исполнении с вращающимся внутренним кольцом магнитное кольцо устанавливается на внутреннем кольце 16 и вращается вместе с ним, в то время как уплотнительное кольцо 21 с сенсором укреплено на наружном кольце 18.
Предлагаемый изобретением способ с применением изображенного здесь подшипника позволяет также использовать прием альтернативных сигналов, таких как ударные волны и частоту шумовых колебаний подшипника, и превращать их в логически реализованные импульсы. Кроме того, изобретение позволяет осуществлять непосредственный контроль вращающихся шариков, сепараторов шарикоподшипников или роликовых подшипников посредством микролазерного луча по стекловолоконному проводу.
Изобретение относится к способу управления и контроля работы лифтовой установки. Способ заключается в том, что данные о состоянии поворотного смещения элементов, вращающихся относительно друг друга, считывают импульсными датчиками, и получаемые импульсные данные преобразуют с помощью вычислительного устройства. Импульсные датчики встраивают в подшипники приводного двигателя и/или канатного шкива, соединенного с этим двигателем, и/или направляющего ролика, связанного с ветвью каната, несущего противовес, и/или направляющего ролика кабины, взаимодействующего с направляющим рельсом шахты, и/или одного из направляющих роликов каната устройства ограничения скорости, и/или привода дверей, и/или привода блокирующего устройства дверей. Технический результат изобретения заключается в упрощении способа управления и контроля лифтовой установкой. 11 з.п.ф-лы, 2 ил.
| ЗАПОР ДЛЯ ДВЕРИ | 0 |
|
SU405999A1 |
| Прибор для определения размера обуви | 1977 |
|
SU631140A1 |
| Устройство формирования путевых команд управления подвижным объектом | 1990 |
|
SU1795956A3 |
| Устройство для программного управления и контроля хода шахтной подъемной машины | 1985 |
|
SU1299932A1 |

