Изобретение относится к бортовым системам автоматического управления летательными аппаратами с самолетной схемой с реализацией возможности режимов с разворотами в продольном канале с большими углами тангажа координированных разворотов в боковом канале с большими углами крена. Кроме того, для этих систем автоматического управления предусматривается адаптация за счет перебора (замены) исходных данных.
Известна система управления беспилотным летательным аппаратом по крену и тангажу, содержащая задатчик угла тангажа, первый и второй блоки сравнения, первый и второй суммирующие усилители, задатчик угла крена, первое и второе исполнительные устройства, объект управления, датчик угловой скорости по тангажу, датчик угла тангажа, датчик угла крена, первый и второй суммирующие усилители (патент РФ №1751716, кл. G05D 13/02, 30.07.92 г.).
Недостатком этой системы являются ограниченные функциональные возможности и невысокая точность управления.
Наиболее близким аналогом (прототипом) является система управления беспилотным летательным аппаратом по крену и тангажу, содержащая первый и второй задатчики опорного сигнала, задатчик угла тангажа, задатчик угла крена, первый и второй блоки выделения модуля, первый и второй блоки выделения сигнала положительной полярности, первый и второй блоки сравнения, первый и второй релейные элементы с зоной нечувствительности, элемент И, первый и второй суммирующие усилители, управляемый переключатель, датчик угла тангажа, датчик угловой скорости по тангажу, с первого по четвертый ограничители, датчик угла крена, датчик угловой скорости по крену, первый и второй сумматоры, первое и второе исполнительные устройства, объект управления (патент РФ №2251136, кл. G05D 1/08, 27.04.05 г.).
Недостатком этой системы управления является низкая точность управления по причине невозможности реализации адаптивности процесса наведения беспилотного летательного аппарата (БЛА).
Техническим результатом заявленного изобретения является повышение точности управления за счет реализации адаптивности процесса наведения БЛА, т.е. замены одного значения исходных данных на несколько программных значений.
Это можно осуществить путем использования программных углов управления вектора дальности по тангажу εi (i=1, ..., m) и программных углов управления вектора дальности по крену νi (i=1, ..., m) (m - число моментов контроля наведения).
Для первого момента (i=1) используются значения ε1 и ν1. В дальнейшем осуществляется проверка неравенства

где  - модуль координаты положения i-ой псевдоцели;
- модуль координаты положения i-ой псевдоцели;
 - модуль координаты положения БЛА в стартовой (земной) системе координат;
- модуль координаты положения БЛА в стартовой (земной) системе координат;
Δ - допустимая погрешность наведения.
Если неравенство (1) соблюдается, то осуществляется переход, т.е. ввод следующих значений для программных углов управления вектора дальности по тангажу ε2 и по крену ν2. В случае невыполнения неравенства (1) работа устройства прекращается и осуществляет ввод новых исходных данных.
Технический результат достигается тем, что адаптивная система управления беспилотным летательным аппаратом по крену и тангажу, содержащая первый и второй задатчики опорного сигнала, первый и второй блоки выделения сигнала положительной полярности, первый и второй блоки выделения модуля, первый и второй блоки сравнения, первый и второй релейные элементы с зоной нечувствительности, элемент И, первый и второй суммирующие усилители, управляемый переключатель, датчик угла тангажа, датчик угловой скорости по тангажу, датчик угла крена, датчик угловой скорости по крену, с первого по четвертый ограничители, первый и второй сумматоры, первое и второе исполнительные устройства и объект управления, первый, второй, третий и четвертый выходы которого соединены соответственно через датчик угловой скорости по тангажу, датчик угла тангажа, датчик угловой угла тангажа, датчик угловой скорости по крену, датчик угла крена с первыми входами соответственно первого суммирующего усилителя, первого блока сравнения, второго суммирующего усилителя и второго блока сравнения, а первый и второй входы объекта управления подключены соответственно через первое и второе исполнительные устройства к выходам первого и второго сумматоров, первые входы которых соединены соответственно через первый и второй ограничители с первым и вторым выходами управляемого переключателя, а вторые входы первого и второго сумматоров подключены соответственно через третий и четвертый ограничители к третьему и четвертому выходам управляемого переключателя, первый и второй входы которого соединены с выходами соответственно первого и второго суммирующих усилителей, вторые входы которых подключены к выходам соответственно первого и второго блоков сравнения, выходы первого и второго задатчиков опорного сигнала соединены с первыми входами соответственно первого и второго блоков выделения сигнала положительной полярности, вторые входы которых подключены к выходам соответственно первого и второго блоков выделения модуля, а выходы соответственно через первый и второй релейные элементы с зоной нечувствительности - к первому и второму входам элемента И, выход которого соединен с третьим входом управляемого переключателя, дополнительно содержит группу задатчиков программного угла управления вектора дальности по тангажу, состоящую из m элементов, группу задатчиков программного угла управления вектора дальности по крену, состоящую из m элементов, первый и второй элементы ИЛИ, первый и второй коммутаторы, управляющие входы которых соединены с пунктом управления, информационные входы этих коммутаторов подключены к выходам соответственно первого и второго элементов ИЛИ, выход первого коммутатора соединен с входом первого блока выделения модуля и со вторым входом первого блока сравнения, а выход второго коммутатора подключен к входу второго блока выделения модуля и ко второму входу второго блока сравнения, выходы каждого из m элементов группы задатчиков программного угла управления вектора дальности по тангажу соединены соответственно с первым по m-ый входами первого элемента ИЛИ, а выходы каждого из m элементов группы задатчиков программного угла управления вектора дальности по крену подключены соответственно к первому по m-ый входам второго элемента ИЛИ.
На чертеже представлена блок-схема системы управления беспилотным летательным аппаратом по крену и тангажу.
Система управления беспилотным летательным аппаратом по крену и тангажу содержит группу 1 задатчиков программного угла управления вектора дальности по тангажу, группу 2 задатчиков программного угла управления вектора дальности по крену, первый 3 и второй 4 элементы ИЛИ, первый 5 и второй 6 задатчики опорного сигнала, первый 7 и второй 8 коммутаторы, управляющие входы которых соединены с пунктом управления (ПУ) (на блок-схеме не показан), первый 9 и второй 10 блоки выделения модуля, первый 11 и второй 12 релейные элементы с зоной нечувствительности, первый 13 и второй 14 блоки выделения сигнала положительной полярности, первый 15 и второй 16 блоки сравнения, первый 17 и второй 18 суммирующие усилители, датчик 19 угла тангажа, датчик 20 угла крена, элемент И 21, управляемый переключатель 22, который может быть выполнен в виде реле, включающего в себя обмотку и контактные группы (его структурная схема приведена в описании прототипа), датчик 23 угловой скорости по тангажу, датчик 24 угловой скорости по крену, первый 25, второй 26, третий 27 и четвертый 28 ограничители, первый 29 и второй 30 сумматоры, первый 31 и второй 32 исполнительные устройства и объект 33 управления.
Система управления беспилотным летательным аппаратом по крену и тангажу работает следующим образом. С выходов первых блоков группы 1 задатчиков программного угла управления вектора дальности по тангажу и группы 2 задатчиков программного угла управления вектора дальности по крену значения ε1 и ν1 подаются соответственно через первый 3 и второй 4 элементы ИЛИ на информационные входы соответственно первого 7 и второго 8 коммутаторов. В данной ситуации на управляющие входы этих коммутаторов с ПУ будут направлены сигналы, следовательно, величина ε1 с выхода первого коммутатора 7 будет засылаться на вход первого блока 9 выделения модуля и на второй вход первого блока 15 сравнения. Значение ν1 с выхода второго коммутатора 8 будет подаваться на вход второго блока 10 выделения модуля и на второй вход второго блока 16 сравнения.
Основные сигналы управления в каналах тангажа и крена σ0В и σ0Э формируются соответственно блоками 7, 15, 17, 19, 23 канала тангажа и 8, 16, 18, 20, 24 канала крена




где К1ϑ, К2ϑ - передаточные коэффициенты первого суммирующего усилителя 17;
Δϑ - сигнал рассогласования по тангажу на выходе первого блока 15 сравнения;
ϑ∂ - сигнал датчика 19 угла тангажа;
ϑзад - задающий сигнал по тангажу на выходе первого коммутатора 7;
ωz∂ - сигнал датчика 23 угловой скорости по тангажу;
К1γ, К2γ - передаточные коэффициенты второго суммирующего усилителя 18;
Δγ - сигнал рассогласования по крену на выходе второго блока 16 сравнения;
γ∂ - сигнал датчика 20 угла крена;
ωx∂ - сигнал датчика 24 угловой скорости по крену.
Сигналы ϑ∂, ωz∂, γ∂, ωx∂ выдаются соответствующими датчиками состояния 19, 23, 20, 24, установленными на объекте 33 управления.
В канале тангажа блоком 13 выделяется сигнал положительной полярности ϑ1-ϑоп, где сигнал ϑ1 формируется блоком 9,  , а сигнал ϑоп задается блоком 5.
, а сигнал ϑоп задается блоком 5.
Соответственно в канале крена блоком 14 выделяется сигнал положительной полярности γоп-γ1, где сигнал γ1 формируется блоком 10,  , а сигнал γоп задается блоком 6.
, а сигнал γоп задается блоком 6.
На основе полученных в блоках 13 и 14 сигналов релейными элементами 11 и 12 формируются, соответственно, сигналы
- на выходе релейного элемента 11:

- на выходе релейного элемента 12:

Сигнал А3 на выходе блока 21 равен

Управляемый переключатель 22 осуществляет переключение цепей управления σ0В с σ'0В (на первом выходе) на σ''0В (на третьем выходе) в канале тангажа и σ0Э с σ'0Э (на втором выходе) на σ''0Э (на четвертом выходе) в канале крена.
А именно:
1) А3=0. Замкнута цепь управляемого переключателя 22 по ограничителю 25 в канале тангажа и ограничителю 26 в канале крена. Режим соответствует состоянию, при котором требуемое значение тангажа невелико, т.е. ϑ1≤ϑоп для любых значений γзад: управление осуществляется с координацией и стабилизацией по крену и со стабилизацией по тангажу. Для этого режима уровень насыщения ограничителя 25 минимален, а уровень насыщения ограничителя 26 максимален;
2) А3=1. Замкнута цепь управляемого переключателя 22 по ограничителю 27 в канале тангажа и ограничителю 28 в канале крена. Режим соответствует возможности глубоких разворотов по тангажу, т.е. в канале тангажа осуществляется управление, а в канале крена - стабилизация. Уровень насыщения ограничителя 27 максимален, а ограничителя 28 минимален.
Таким образом, в канале тангажа формируются сигналы управления
σ'0В, σ''0В - на первом и третьем выходах управляемого переключателя 22;
σ1В - на выходе первого ограничителя 25;
σ2В - на выходе третьего ограничителя 27;
σВ - на выходе первого сумматора 29.
В канале крена формируются сигналы управления
σ'0Э, σ''0Э - на втором и четвертом выходах управляемого переключателя 22;
σ1Э - на выходе второго ограничителя 26;
σ2Э - на выходе четвертого ограничителя 28;
σЭ - на выходе второго сумматора 30.
На выходах первого 31 и второго 32 исполнительных устройств формируются отклонения δВ и δЭ органов исполнительных устройств в канале тангажа (элевоны) и в канале крена (элероны) соответственно, которые отклоняют объект 33 управления по тангажу на угол ϑ с угловой скоростью ωz и по крену на угол γ с угловой скоростью ωx.
На ПУ осуществляется проверка неравенства (1). Если оно соблюдается, то на управляющие входы первого 7 и второго 8 коммутаторов будут поданы сигналы, и значения ε2 и ν2 с выходов вторых блоков групп задатчиков 1 и 2 засылаются соответственно на блоки 9, 15 и 10, 16 для работы системы по уже описанному порядку. Таким образом осуществляется ввод всех значений программных углов управления дальности по тангажу и по крену, вплоть до значений εm и νm. Если на каком-то шаге работы системы неравенство (1) не будет соблюдаться, то сигналы на управляющие входы коммутаторов 7 и 8 подаваться не будут, и система управления прекратит свою работу, так как эти коммутаторы окажутся закрытыми, и исходные данные εi и νi не поступят в соответствующие блоки. В данной ситуации необходимо осуществить замену исходных программных данных.
Все звенья управляющей части системы, в частности логические звенья, блоки выделения модуля, являются стандартными и могут быть реализованы на элементах автоматики и вычислительной техники.
Таким образом, предложенная система управления беспилотным летательным аппаратом по крену и тангажу позволяет повысить точность управления за счет реализации адаптивности процесса наведения БЛА, т.е. замены одного значения исходных данных на несколько программных значений.
Промышленная применимость изобретения обосновывается тем, что оно может быть использовано в различных областях (отраслях) в системах управления БЛА с самолетной схемой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2005 |
|
RU2293366C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2003 |
|
RU2251136C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ДЛЯ РУЛЕВЫХ ПРИВОДОВ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2703007C1 |
| УПРАВЛЯЕМАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2012 |
|
RU2518126C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ И СРАВНЕНИЯ ЭФФЕКТИВНОСТИ ФУНКЦИОНИРОВАНИЯ ОДНОТИПНЫХ ОРГАНИЗАЦИЙ | 2008 |
|
RU2363042C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ЭФФЕКТИВНОСТИ | 2006 |
|
RU2306598C1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
Изобретение относится к области приборостроения и может найти применение в бортовых системах автоматического управления летательными аппаратами. Технический результат - повышение точности управления. Для достижения данного результата система содержит два задатчика опорного сигнала, два задатчика параметров, два коммутатора, два элемента ИЛИ, два блока выделения модуля, два блока выделения сигнала положительной полярности, два релейных элемента, два блока сравнения, два суммирующих усилителя, элемент И, управляемый переключатель, четыре ограничителя, датчики углов тангажа и крена, датчики угловых скоростей по тангажу и крену, два сумматора и два исполнительных устройства. 1 ил.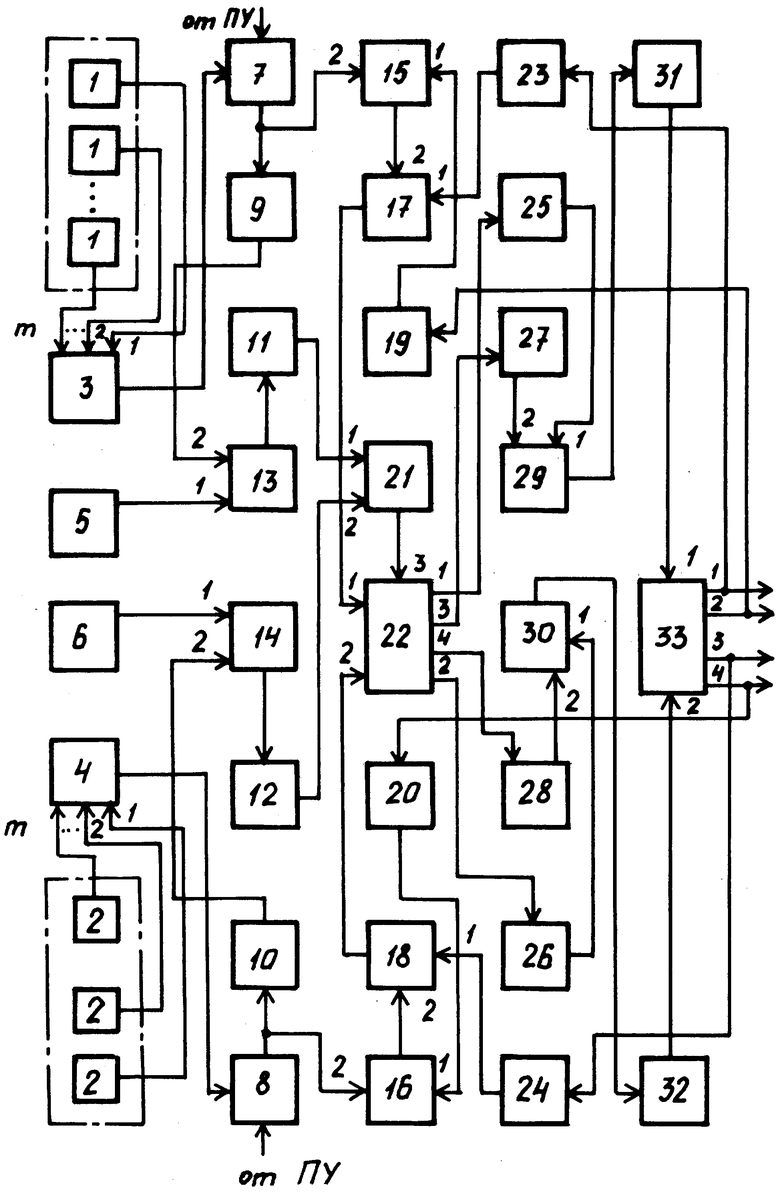
Адаптивная система управления беспилотным летательным аппаратом по крену и тангажу, содержащая первый и второй задатчики опорного сигнала, первый и второй блоки выделения сигнала положительной полярности, первый и второй блоки выделения модуля, первый и второй блоки сравнения, первый и второй релейные элементы с зоной нечувствительности, элемент И, первый и второй суммирующие усилители, управляемый переключатель, датчик угла тангажа, датчик угловой скорости по тангажу, датчик угла крена, датчик угловой скорости по крену, с первого по четвертый ограничители, первый и второй сумматоры, первое и второе исполнительные устройства и объект управления, первый, второй, третий и четвертый выходы которого соединены соответственно через датчик угловой скорости по тангажу, датчик угла тангажа, датчик угловой скорости по крену, датчик угла крена с первыми входами соответственно первого суммирующего усилителя, первого блока сравнения, второго суммирующего усилителя и второго блока сравнения, а первый и второй входы объекта управления подключены соответственно через первое и второе исполнительные устройства к выходам первого и второго сумматоров, первые входы которых соединены соответственно через первый и второй ограничители с первым и вторым выходами управляемого переключателя, а вторые входы первого и второго сумматоров подключены соответственно через третий и четвертый ограничители к третьему и четвертому выходам управляемого переключателя, первый и второй входы которого соединены с выходами соответственно первого и второго суммирующих усилителей, вторые входы которых подключены к выходам соответственно первого и второго блоков сравнения, выходы первого и второго задатчиков опорного сигнала соединены с первыми входами соответственно первого и второго блоков выделения сигнала положительной полярности, вторые входы которых подключены к выходам соответственно первого и второго блоков выделения модуля, а выходы соответственно через первый и второй релейные элементы с зоной нечувствительности - к первому и второму входам элемента И, выход которого соединен с третьим входом управляемого переключателя, отличающаяся тем, что она дополнительно содержит группу задатчиков программного угла управления вектора дальности по тангажу, состоящую из m элементов, группу задатчиков программного угла управления вектора дальности по крену, состоящую из m элементов, первый и второй элементы ИЛИ, первый и второй коммутаторы, управляющие входы которых соединены с пунктом управления, информационные входы этих коммутаторов подключены к выходам соответственно первого и второго элементов ИЛИ, выход первого коммутатора соединен с входом первого блока выделения модуля и со вторым входом первого блока сравнения, а выход второго коммутатора подключен к входу второго блока выделения модуля и ко второму входу второго блока сравнения, выходы каждого из m элементов группы задатчиков программного угла управления вектора дальности по тангажу соединены соответственно с первым по m-ый входами первого элемента ИЛИ, а выходы каждого из m элементов группы задатчиков программного угла управления вектора дальности по крену подключены соответственно к первому по m-ый входам второго элемента ИЛИ.
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2003 |
|
RU2251136C1 |
| Устройство координированного регулирования углового бокового движения летательного аппарата | 1990 |
|
SU1751716A1 |
| Михалев И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.174 | |||
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| Боднер В.А | |||
| Системы управления летательными аппаратами | |||
| М.: Машиностроение | |||
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2003 |
|
RU2251136C1 |

