Изобретение относится к комплексным моделирующим устройствам, используемым при проектировании и испытаниях сложных систем управления беспилотными летательными аппаратами.
При проектировании и испытании сложных систем управления (СУ) беспилотными летательными аппаратами (БПЛА) широко применяются методы моделирования. Важной проблемой моделирования является обеспечение требуемой высокой точности, повышение достоверности проверки аппаратуры. Так как основным устройством, обеспечивающим требуемое качество СУ БПЛА, является устройство выработки сигналов управления (или автопилот), то первостепенной задачей моделирования является проверка его алгоритмов, логики работы и исследование влияния его настраиваемых параметров на работоспособность всей системы управления. Для достоверной проверки процессов, протекающих в аппаратуре СУ, моделирующие комплексы оснащаются специализированными устройствами, обеспечивающими управление по заданной программе и контроль функционирования в процессе проверок, сбор и обработку данных для принятия решений о работоспособности СУ БПЛА.
Известен моделирующий комплекс аналогичного назначения, содержащий реальную аппаратуру СУ БПЛА (радиолокационный визир, датчики углов и угловых скоростей, рулевые механизмы и устройство выработки сигналов управления), имитационную аппаратуру, устройства отображения информации, устройство управления и вычислители. Устройство управления обеспечивает задание программы моделирования, управление и контроль функционирования. Имитационная аппаратура позволяет воспроизводить воздействие внешней среды и радиообстановку. В вычислителях реализуются модели процесса управления, что обеспечивает замыкание модели [1, рис.10.1, с.293].
Недостатками известного моделирующего комплекса является избыточная сложность при проверке и отработке алгоритмов устройства выработки сигналов управления БПЛА, обусловленная использованием комбинации имитаторов и аппаратуры системы управления БПЛА, и, как следствие, невысокая точность и достоверность испытаний, а также отсутствие контроля и диагностики при проверке функционирования устройства выработки сигналов управления в процессе моделирования.
Наиболее близким по технической сущности аналогом, принятым в качестве прототипа предлагаемого изобретения, является система [2] для прогнозирования результатов натурных испытаний беспилотного летательного аппарата, которая содержит имитатор беспилотного летательного аппарата, имитаторы радиовысотомера, измерителей углов и угловых скоростей, измерителей линейных ускорений, рулевых механизмов, имитатор измерителя координат объекта наблюдения, а также устройство управления, в состав которого входят пульт управления, задатчик параметров объекта наблюдения и блок формирования серии пусков, устройство обработки результатов испытаний и индикатор. В имитаторе БПЛА и имитаторе измерителя координат объекта наблюдения по исходным данным вырабатываются сигналы о положении БПЛА и объекта наблюдения в пространстве, их относительных скоростях движения. В соответствии с получаемыми сигналами в имитаторе измерителя координат объекта наблюдения вырабатываются сигналы измеренных углов азимута и места цели объекта наблюдения, которые вместе с сигналами, получаемыми на выходах датчиков угловых скоростей, измерителей углов, линейных ускорений и имитатора радиовысотомера поступают в устройство выработки сигналов управления. В устройстве выработки сигналов управления вырабатываются сигналы управления силовыми приводами рулевых механизмов БПЛА, которые через имитатор рулевых механизмов поступают на соответствующие входы имитатора беспилотного летательного аппарата, замыкая контур управления исследуемой системы управления БПЛА. Система останавливается в момент встречи БПЛА и объекта наблюдения, в который вычислителем вероятности встречи и вычислителем оценок точности (промаха) определяются вероятность попадания летательного аппарата в цель (объект наблюдения), а также значения среднеквадратического отклонения, дисперсии и математического ожидания величины промаха, по которым делаются выводы о качестве СУ БПЛА.
Недостатком системы по прототипу является недостаточно высокая достоверность моделирования ввиду отсутствия в процессе проведения испытаний диагностики правильности работы устройства выработки сигналов управления БПЛА. Качество СУ БПЛА оценивается только по конечному результату (промаху), и не оцениваются промежуточные показатели функционирования устройства выработки сигналов управления БПЛА. Кроме этого, в системе по прототипу моделирование проводится раздельно в боковой и продольной плоскостях, что не соответствует штатному режиму функционирования устройства выработки сигналов управления и может приводить к ошибочным результатам проверки.
Техническим результатом изобретения является повышение достоверности моделирования СУ БПЛА за счет введения процедур контроля и диагностики аппаратуры комплекса в процессе моделирования, а также более полного приближения к реальным режимам работы СУ БПЛА.
Известно, что проверка системы управления БПЛА на моделирующем комплексе требует проведения большой программы испытаний. Основными критериями оценки качества аппаратуры СУ БПЛА являются точность наведения БПЛА на объект наблюдения и вероятность попадания, которые количественно оценивают по величине промаха или пролета. Величина пролета зависит как от многих случайных факторов, характеризующих работу СУ БПЛА, так и от настраиваемых параметров устройства выработки сигналов управления (автопилота). Поэтому для повышения достоверности проверки на моделирующем комплексе СУ БПЛА предлагается формировать такую временную последовательность команд управления моделирующим комплексом, по которым осуществляется пошаговый переход комплекса из одного состояния в другое, и анализировать правильность выполнения каждого шага.
В предлагаемом комплексе осуществляется проверка системы управления БПЛА с учетом воздействия на элементы системы как внешних возмущающих факторов, так и с учетом взаимного влияния (перекрестных связей) продольного и бокового каналов управления друг на друга, что обеспечивает функционирование основного управляющего прибора аппаратуры БПЛА - устройства выработки сигналов управления - в условиях, максимально приближенных к реальным.
Оценка точности СУ БПЛА осуществляется по величине промаха (пролета ЛА мимо объекта наблюдения) при многократном задании начальных условий и исходных данных с непрерывной пошаговой проверкой правильности выполнения операций.
Введение в моделирующий комплекс автоматизации контроля работы автопилота в различных режимах движения БПЛА позволяет значительно повысить достоверность результатов испытаний за счет увеличения объема испытаний и при этом сэкономить ресурс реальной аппаратуры (который обычно ограничен).
Сущность изобретения заключается в том, что моделирующий комплекс для проверки системы управления беспилотного летательного аппарата (БПЛА), содержащий устройство моделирования бокового движения БПЛА и устройство моделирования продольного движения БПЛА, входящие в состав имитатора БПЛА, имитатор рулевых механизмов, имитатор измерителя координат объекта наблюдения, имитатор датчиков угловых скоростей, имитатор измерителей углов, имитатор измерителей линейных ускорений, имитатор ветровых порывов, имитатор подстилающей поверхности, имитатор радиовысотомера, устройство выработки сигналов управления, блок контроля пролета, устройство обработки результатов испытаний, в состав которого входят счетчик конечного кода, вычислитель вероятности встречи и вычислитель оценок промаха, а также устройство управления испытаниями, в состав которого входят пульт управления, задатчик параметров объекта наблюдения и блок формирования серии пусков, при этом первый выход пульта управления соединен с входом запуска блока формирования серии пусков, выходы пульта управления, на которых формируются сигналы программных параметров траектории БПЛА, подключены к соответствующим входам устройства выработки сигналов управления, а выходы, на которых формируются сигналы начальной установки дальности и параметров относительного движения объекта наблюдения и БПЛА, - к соответствующим входам имитатора измерителя координат объекта наблюдения, выходы которого по сигналам измеренных углов места и азимута объекта наблюдения подключены к соответствующим входам устройства выработки сигналов управления, а выход по сигналу текущей дальности объекта наблюдения подключен к входу блока контроля пролета, выходы устройства моделирования продольного движения, на которых формируются сигналы скорости и угла наклона траектории БПЛА, соединены с соответствующими входами имитатора измерителя координат объекта наблюдения, выходы устройства моделирования бокового движения БПЛА, на которых формируются сигналы скоростей изменения углов крена и курса, и выход устройства моделирования продольного движения БПЛА, на котором формируется сигнал скорости изменения угла тангажа, подключены к соответствующим входам имитатора датчиков угловых скоростей, выходы устройства моделирования бокового движения, на которых формируются сигналы углов курса и крена, и выход устройства моделирования продольного движения, на котором формируется сигнал угла тангажа, соединены с входами имитатора измерителей углов, выходы устройств моделирования бокового и продольного движения БПЛА, на которых формируются сигналы соответствующих проекций линейных ускорений БПЛА в земной системе координат, соединены с входами имитатора измерителей линейных ускорений, выход устройства моделирования бокового движения БПЛА, на котором формируется сигнал бокового отклонения траектории БПЛА, соединен с соответствующими входами имитатора измерителя координат объекта наблюдения и устройства обработки результатов испытаний, выход устройства моделирования продольного движения БПЛА, на котором формируется сигнал высоты полета БПЛА, соединен с соответствующими входами имитатора измерителя координат объекта наблюдения, устройства обработки результатов испытаний и имитатора радиовысотомера, второй информационный вход которого соединен с выходом имитатора подстилающей поверхности, кроме этого, выходы устройства моделирования продольного движения БПЛА, на которых формируются сигналы угла атаки и угла тангажа, сигналы скорости и высоты полета БПЛА, а также его вход по сигналу угла крена БПЛА соединены с соответствующими входами и выходом устройства моделирования бокового движения БПЛА, выход имитатора ветровых порывов соединен с соответствующими входами устройств моделирования бокового и продольного движения БПЛА, выходы имитатора датчиков угловых скоростей, имитатора измерителей углов, имитатора измерителей линейных ускорений и имитатора радиовысотомера подключены к соответствующим входам устройства выработки сигналов управления, выходы которого по сигналам управления рулями высоты, направления и элеронами соединены с соответствующими входами имитатора рулевых механизмов, выход имитатора рулевых механизмов, на котором формируется сигнал угла закладки руля высоты, соединен с соответствующим входом устройства моделирования продольного движения БПЛА, а выходы, на которых формируются сигналы углов закладки руля направления и элеронов, - с соответствующими входами устройства моделирования бокового движения БПЛА, выход блока контроля пролета, на котором формируется сигнал окончания пуска, соединен с соответствующими входами устройства обработки результатов испытаний и блока формирования серии пусков, входы которых по сигналу количества пусков в серии соединены с соответствующим выходом задатчика параметров объекта наблюдения, а выходы задатчика параметров объекта наблюдения, на которых формируются сигнал высоты радиолокационного центра отражения объекта наблюдения и сигналы размеров объекта наблюдения, соединены с соответствующими входами устройства обработки результатов испытаний, дополнительно содержит устройство регистрации информации, блок задания режимов, введенный в состав устройства управления испытаниями, вычислитель коэффициентов перекрестных связей, введенный в состав имитатора БПЛА, а также вычислитель оценок бокового промаха и индикатор, введенные в состав устройства обработки результатов испытаний, в котором вычислитель оценок промаха является вычислителем оценок вертикального промаха, при этом выходы вычислителя коэффициентов перекрестных подключены к соответствующим входам устройства моделирования бокового движения и устройства моделирования продольного движения БПЛА, а его входы соединены с выходами устройства моделирования бокового движения БПЛА, на которых формируются сигналы углов скольжения и крена и с выходами устройства моделирования продольного движения, на которых формируются сигналы углов атаки и тангажа, сигналы скорости и высоты полета БПЛА и сигнал скорости изменения угла тангажа, входы устройства регистрации информации соединены с выходами сигналов углов закладки рулей направления, высоты и элеронов имитатора рулевых механизмов, а также с выходом сигнала бокового отклонения траектории БПЛА устройства моделирования бокового движения БПЛА и с выходом сигнала высоты полета БПЛА устройства моделирования продольного движения БПЛА, блок задания режимов содержит задатчик циклограммы и такта вычислительных операций, три блока согласования и таймер, первый вход которого подключен к выходу блока формирования серии пусков, второй вход соединен с выходом сигналов задания циклограммы задатчика циклограммы и такта вычислительных операций, а третий вход, соединенный со вторыми входами блоков согласования, подключен к выходу тактовых сигналов задатчика циклограммы и такта вычислительных операций, первый выход таймера через первый блок согласования соединен с управляющими входами устройств моделирования бокового и продольного движения БПЛА, вычислителя коэффициентов перекрестных связей и имитатора измерителя координат объекта наблюдения, ко второму, третьему и шестому выходам таймера подключены соответственно управляющие входы имитатора ветровых порывов, имитатора подстилающей поверхности и устройства выработки сигналов управления, четвертый выход таймера через второй блок согласования соединен с управляющими входами имитатора радиовысотомера, имитатора датчиков угловых скоростей, имитатора измерителей углов и имитатора измерителей линейных ускорений, а его пятый выход через третий блок согласования соединен с управляющим входом имитатора рулевых механизмов, кроме этого, вход устройства обработки результатов испытаний, на который поступает сигнал окончания пуска, является управляющим входом счетчика конечного кода, а вход по сигналу количества пусков в серии соединен со счетным входом счетчика конечного кода и с первыми входами вычислителей оценок бокового и вертикального промаха и вычислителя вероятности встречи, вторые входы которых подключены к выходу счетчика конечного кода, третьи входы вычислителя оценок бокового промаха и вычислителя вероятности встречи образуют вход устройства обработки результатов испытаний, на который поступает сигнал бокового отклонения траектории БПЛА, третий вход вычислителя оценок вертикального промаха и четвертый вход вычислителя вероятности встречи образуют вход устройства обработки результатов испытаний, на который поступает сигнал высоты полета БПЛА, четвертый вход вычислителя оценок вертикального промаха образует вход устройства обработки результатов испытаний, на который поступает сигнал высоты радиолокационного центра отражения объекта наблюдения, входы с пятого по восьмой вычислителя вероятности встречи образуют входы устройства обработки результатов испытаний, на которые поступают сигналы размеров объекта наблюдения, а выход вычислителя вероятности встречи и выходы вычислителей оценок бокового и вертикального промаха подключены к индикатору.
Благодаря введению в предлагаемый моделирующий комплекс блока задания режимов, более информативного устройства регистрации и индикатора, наглядно отображающего ошибки параллельно работающих каналов моделирования продольного и бокового движения БПЛА, обеспечивается более полный контроль и диагностика протекания процессов проверок СУ БПЛА.
Введение в имитатор БПЛА вычислительных блоков, обеспечивающих вычисление поправок, учитывающих перекрестные связи между устройствами моделирования продольного и бокового движения летательного аппарата, позволяет максимально приблизить условия испытания системы управления к реальным и моделировать пространственное движение БПЛА в условиях воздействия таких возмущений, как ветер и подстилающая поверхность, что особенно актуально при исследовании режимов полета ЛА на малой высоте, что повышает достоверность проверки СУ БПЛА.
Сущность изобретения поясняется дальнейшим описанием и чертежами, на которых представлены:
фиг.1 - структурно-функциональная схема моделирующего комплекса;
фиг.2 - структурно-функциональная схема имитатора измерителя координат объекта наблюдения;
фиг.3 - структурно-функциональная схема имитатора летательного аппарата;
фиг.4 - структурно-функциональная схема устройства обработки результатов испытаний;
фиг.5 - структурно-функциональная схема вычислителей оценок бокового и вертикального промаха;
фиг.6 - структурно-функциональная схема вычислителя вероятности встречи;
фиг.7 - структурно-функциональная схема блока задания режимов;
фиг.8 - структурно-функциональная схема устройства управления испытаниями;
фиг.9 - структурно-функциональная схема устройства выработки сигналов управления;
фиг.10 - структурно-функциональная схема пульта управления.
На фиг.1 структурно-функциональной схемы моделирующего комплекса обозначены:
1 - имитатор измерителя координат объекта наблюдения;
2 - имитатор беспилотного летательного аппарата;
3 - блок контроля пролета;
4 - устройство регистрации информации;
5 - устройство обработки результатов испытаний;
6 - блок задания режимов;
7 - устройство управления испытаниями;
8 - блок формирования серии пусков;
9 - задатчик параметров объекта наблюдения;
10 - пульт управления;
11 - имитатор ветровых порывов;
12 - имитатор радиовысотомера;
13 - имитатор подстилающей поверхности;
14 - имитатор рулевых механизмов;
15 - имитатор датчиков угловых скоростей;
16 - имитатор измерителя углов;
17 - имитатор измерителя линейных ускорений;
18 - устройство выработки сигналов управления.
Согласно фиг.1 в состав устройства 7 управления испытаниями входят блок 6 задания режимов, блок 8 формирования серии пусков, задатчик 9 параметров объекта наблюдения и пульт 10 управления.
Первый выход пульта 10 управления, на котором формируется сигнал запуска комплекса, соединен с третьим входом (запуска) блока 8 формирования серии пусков, первый вход которого, соединенный с первым входом устройства 5 обработки результатов испытаний, соединен с выходом блока 3 контроля пролета, на котором формируется сигнал окончания пуска, выход блока 8 формирования серии пусков соединен с входом блока 6 задания режимов, второй его вход, соединенный с четвертым входом устройства 5 обработки результатов испытаний, подключен к первому выходу задатчика 9 параметров объекта наблюдения, на котором формируется сигнал количества пусков в серии пусков,а второй выход и выходы с третьего по пятый задатчика 9 параметров объекта наблюдения, на которых формируется сигнал высоты радиолокационного центра отражения объекта наблюдения и сигналы размеров объекта наблюдения, соединены с пятым входом и входами с шестого по девятый устройства 5 обработки результатов испытаний.
Первый выход блока 5 задания режимов соединен с управляющими (первыми) входами имитатора 1 измерителя координат объекта наблюдения и имитатора 2 беспилотного летательного аппарата, второй и третий выходы соединены с управляющими входами имитатора 11 ветровых порывов и имитатора 13 подстилающей поверхности, выход которого подключен ко второму информационному входу имитатора 12 радиовысотомера. Пятый и шестой выходы блока 6 задания режимов соединены соответственно с четвертым (управляющим) входом имитатора 14 рулевых механизмов и двенадцатым (управляющим) входом устройства 18 выработки сигналов управления, а четвертый выход соединен с управляющим (третьим) входом имитатора 12 радиовысотомера и с управляющими входами имитатора 15 датчиков угловых скоростей, имитатора 16 измерителей углов и имитатора измерителей линейных ускорений.
Выходы со второго по пятый пульта 10 управления, на которых формируются сигналы начальной установки дальности объекта наблюдения и параметров относительного движения объекта наблюдения и БПЛА, соединены с входами со второго по пятый имитатора 1 измерителя координат объекта наблюдения, а выходы с шестого по одиннадцатый пульта 10 управления, на которых формируются сигналы программных параметров траектории БПЛА, соединены с входами с тринадцатого по восемнадцатый устройства 18 выработки сигналов управления.
К первому, второму и третьему входам устройства 18 выработки сигналов управления подключены выходы имитатора 16 измерителей углов, к третьему, четвертому и пятому входам подключены выходы имитатора 15 датчиков угловых скоростей, к седьмому и восьмому входам подключены первый и второй выходы имитатора 1 измерителя координат объекта наблюдения, на которых формируются сигналы измеренных угла азимута ΨA и угла места υA объекта наблюдения, к девятому и десятому входам подключены выходы имитатора 17 измерителей линейных ускорений, а к одиннадцатому входу подключен выход имитатора 12 радиовысотомера.
Выходы устройства 18 выработки сигналов управления, на которых формируются сигналы σВ, σН, σЭ управления рулями высоты, направления и элеронами, соединены с первым, вторым и третьим входами имитатора 14 рулевых механизмов, а первый, второй и третий выходы последнего, на которых формируются сигналы δВ, δН, δЭ углов закладки рулей высоты, направления и элеронов, соединены соответственно с третьими, четвертыми и пятыми входами устройства 4 регистрации информации и имитатора 2 БПЛА, второй вход которого подключен к выходу имитатора 11 ветровых порывов.
Первый, второй и третий выходы имитатора 2 БПЛА, на которых формируются сигналы ωX, ωY, ωZ скоростей изменения углов курса, крена и тангажа БПЛА, соединены с входами имитатора 15 датчиков угловых скоростей, четвертый, пятый и шестой выходы, на которых формируются сигналы ψ, γ и ν углов курса, крена и тангажа БПЛА, соединены с входами имитатора 16 измерителей углов, девятый и десятый выходы, на которых формируются сигналы скорости V и угла θ наклона траектории БПЛА, соединены с шестым и седьмым входами имитатора 1 измерителя координат объекта наблюдения, а одиннадцатый и двенадцатый выходы, на которых формируются сигналы aY и aZ линейных ускорений БПЛА в земной системе координат, соединены с входами имитатора 17 измерителей линейных ускорений.
Седьмой выход имитатора 2 БПЛА, на котором формируется сигнал Yg высоты полета БПЛА, соединен со вторым входом устройства 4 регистрации информации, третьим входом устройства 5 обработки результатов испытаний, первым информационным входом имитатора 12 радиовысотомера и с девятым входом имитатора 1 измерителя координат объекта наблюдения, третий выход которого по сигналу D дальности объекта наблюдения соединен с входом блока 3 контроля пролета, а восьмой вход, соединенный с первым входом устройства 4 регистрации информации и со вторым входом устройства 5 обработки результатов испытаний, подключен к восьмому выходу имитатора 2 БПЛА, на котором формируется сигнал Zg бокового отклонения траектории БПЛА.
Имитатор 1 измерителя координат объекта наблюдения предназначен для моделирования и выработки сигналов углового положения объекта наблюдения относительно строительной оси БПЛА: - ϑA - измеренного угла места, ΨA - измеренного угла азимута, которые в реальной аппаратуре вырабатываются радиолокационным визиром системы управления ЛА.
Алгоритм работы имитатора 1 измерителя координат объекта наблюдения описывается известной системой уравнений [3, 6]:



где D - текущее расстояние (дальность) до объекта наблюдения; V - скорость полета БПЛА; zg и yg - координаты БПЛА (боковое отклонение и высота полета) в нормальной земной системе координат; Θ - угол наклона траектории; q - задаваемый курсовой угол БПЛА; DЦ, Vц к qц - задаваемые параметры движения объекта наблюдения (дальность, скорость, курсовой угол); ΨA=φц и ϑA=εц - углы визирования объекта наблюдения по азимуту и углу места.
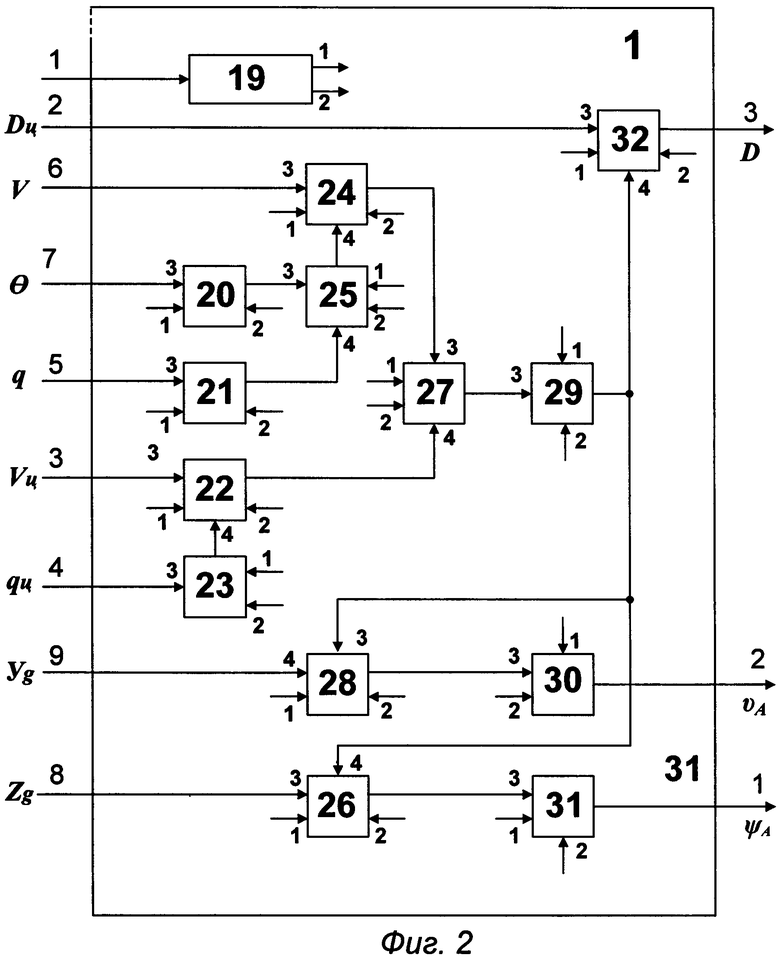
Структурная схема имитатора 1 измерителя координат объекта наблюдения, реализующего указанный алгоритм, представлена на фиг.2, где обозначено:
19 - таймер,
20, 21 - вычислители функции Cos,
22 - умножитель,
23 - вычислитель функции Cos,
24, 25 - умножители,
26 - делитель,
27 - сумматор,
28 - делитель,
29 - интегратор,
30, 31 - вычислители функции Sin,
32 - блок памяти.
Первым (управляющим) входом имитатора 1 измерителя координат объекта наблюдения является вход таймера 19, первый и второй выходы которого подключены к первым и вторым входам всех вычислительных блоков 20,…, 32 имитатора 1 измерителя координат объекта наблюдения, как показано на фиг.2.
Вторым входом имитатора 1 (по сигналу задаваемой дальности объекта наблюдения - DЦ) является третий вход блока 32 памяти, выход которого является третьим выходом имитатора 1 измерителя координат объекта наблюдения, на котором формируется сигнал текущей дальности D объекта наблюдения. Четвертый вход блока 32 памяти, соединенный с четвертым входом делителя 26 и третьим входом делителя 28, подключен к выходу интегратора 29, третий вход которого подключен к выходу сумматора 27.
Третий вход сумматора 27 соединен с выходом умножителя 24, третий вход которого подключен к шестому входу имитатора 1 (по сигналу скорости полета летательного аппарата - V). Четвертый вход сумматора 27 соединен с выходом умножителя 22, третий вход которого подключен к третьему входу имитатора 1 (по сигналу задаваемой скорости объекта наблюдения - VЦ).
Седьмой и пятый входы имитатора 1 измерителя координат объекта наблюдения (по сигналам угла наклона траектории - θ и задаваемого курсового угла q БПЛА) через вычислители 20 и 21 функции Cos соединены с третьим и четвертым входами умножителя 25, а четвертый вход имитатора 1 (по сигналу qц задаваемого курсового угла объекта наблюдения) подключен к третьему входу вычислителя 23 функции Cos, выход которого соединен с четвертым входом умножителя 22.
Восьмой и девятый входы имитатора 1 (по сигналам Zg и Yg) через делители 26 и 28 подключены к третьим входам вычислителей 31 и 30 функции Sin, выходы которых являются первым и вторым выходами имитатора 1, на которых формируются сигналы ΨA, ϑA углов визирования объекта наблюдения по азимуту и углу места.
Имитатор 2 беспилотного летательного аппарата предназначен для выработки информации о моделируемом положении БПЛА в пространстве, его углах атаки и скольжения, угловых и линейных скоростях.
Известно [3, с.403-404, 473-474, 4], что для большинства беспилотных летательных аппаратов система дифференциальных уравнений, описывающих возмущенное движение, распадается на две группы уравнений, одна из которых описывает изменение параметров продольного движения, а другая - бокового движения, между которыми действуют перекрестные связи.
Эта особенность учитывается и при построении имитатора БПЛА, что позволяет существенно упростить его реализацию.
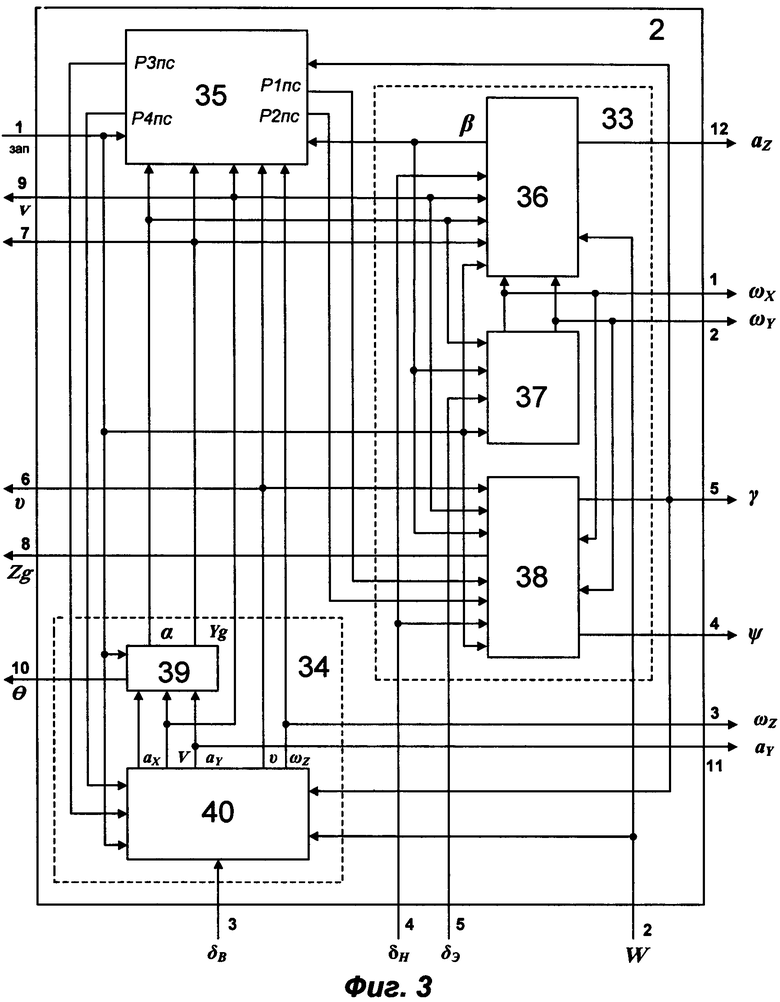
Согласно фиг.2 структурно-функциональной схемы имитатора 2 БПЛА в его состав входят устройство 33 моделирования бокового движения БПЛА, устройство 34 моделирования продольного движения БПЛА и вычислитель 35 коэффициентов перекрестных связей.
Алгоритм работы устройства 33 моделирования бокового движения летательного аппарата описывается следующей системой уравнений:















где l - характерный размер;
ψ, γ, ϑ - углы курса, крена и тангажа БПЛА;
 ,
,  , Cza, mx, my - аэродинамические характеристики БПЛА;
, Cza, mx, my - аэродинамические характеристики БПЛА;
ωx, ωy, ωy - угловые скорости БПЛА;
Jx, Jy, Jxy - главные и центробежный моменты;
β, βw - угол скольжения и составляющая угла скольжения от боковых порывов ветра;
a z - ускорение;
α - угол атаки;
δН, δВ, δЭ - углы закладки рулей направления, высоты и элеронов;
a(yg,T(yg) и ρ(yg,T(yg), ρ) - скорость звука и плотность воздуха, зависящие от распределения температуры воздуха по высоте и давления в точке местонахождения БПЛА;
S - характерная площадь;
bA - средняя аэродинамическая хорда;
g - ускорение свободного падения;
m - масса БПЛА;
ρ(yg,V) и mсек(yg,V) - высотно-скоростная и дроссельная характеристики маршевого двигателя;
 ,
,
 ,
,
 ,
,
Ρ1nc и Ρ2nc - поправки, учитывающие взаимное влияние продольного и бокового каналов управления.
Устройство 33 моделирования бокового движения БПЛА, в котором программно или аппаратно (с использованием умножителей, делителей, сумматоров, квадраторов, интеграторов и т.п.) производится вычисление вышеуказанных зависимостей, состоит из трех функциональных узлов, а именно:
- вычислитель 36 параметров траектории БПЛА, в котором реализуются соотношения (2.1), (2.2), (2.8) и производится определение значения угла скольжения β (с поправкой, учитывающей порывы ветра) и значения линейного ускорения a z,
- вычислитель 37 угловых скоростей БПЛА, в котором реализуются соотношения (2.3), (2.4), (2.5), (2.6), (2.7) и производится определение значений скорости изменения углов крена ωX и курса ωY;
- вычислитель 38 кинематических соотношений и преобразования координат, в котором реализуются соотношения (2.9), (2. 10), (2.12) и производится определение значений бокового отклонения Zg, и углов ψ, γ курса и крена БПЛА.
Алгоритм работы устройства 34 моделирования продольного движения летательного аппарата может быть описан следующей системой уравнений:













где αw - составляющая угла атаки от вертикальных порывов ветра;
a x и a y - ускорения;
Cxa, Cya, mz - аэродинамические характеристики БПЛА;
g - ускорение свободного падения;
Jz - момент инерции ЛА;
H - высота, измеряемая радиовысотомером;
yм - текущая высота подстилающей поверхности под ЛА;
Ρ3n.c., Ρ4n.c. - поправки, учитывающие взаимное влияние продольного и бокового каналов управления.
Устройство 34 моделирования продольного движения БПЛА, программно или аппаратно реализующее указанные соотношения, состоит из вычислителя 39 параметров траектории БПЛА, в котором производится определение значений угла наклона траектории θ (соотношение 3.2), высоты полета Yg (соотношение 3.9) и угла атаки α (соотношение 3.11), и вычислителя 40 параметров движения БПЛА, в котором производится определение значений высоты полета V, линейных ускорений a X и a Y, угла тангажа υ и скорости изменения угла тангажа ωZ (соотношения (3.1, 3.3, 3.4, 3.5, 3.8, 3.11)).
Вычислитель 35 коэффициентов перекрестных связей, который также может быть реализован программно или аппаратно, определяет значения величин поправок Ρ1n.c, Ρ2n.c (соотношения 2.12,2.14) и Ρ3n.c, Ρ4n.c (соотношения 3.12, 3.13).
При этом, как показано на фиг.3, к первому входу имитатора 2 БПЛА, на который поступает сигнал запуска из блока 6 задания режимов, подключены входы таймеров, входящих в состав вычислительных блоков 35,…, 40 и задающих логико-временные зависимости производимых вычислительных операций.
Ко второму входу имитатора 2, на который из имитатора 11 ветровых порывов поступает значение сигнала ветровых порывов W, подключены соответствующие входы вычислителя 36 параметров траектории устройства 33 моделирования бокового движения и вычислителя 40 параметров движения БПЛА устройства 34 моделирования параметров продольного движения БПЛА.
Третий вход имитатора 2 образован соответствующим входом вычислителя 40 параметров движения БПЛА по сигналу угла закладки руля высоты δВ, к четвертому входу имитатора 2, на который поступает сигнал угла закладки руля направления δН, подключены соответствующие входы вычислителя 36 параметров траектории БПЛА и вычислителя 38 кинематических соотношений, а к пятому входу, на который поступает сигнал угла закладки элеронов δЭ, подключен соответствующий вход вычислителя 37 угловых скоростей БПЛА.
Выходы вычислителя 35 коэффициентов перекрестных связей, на которых формируются значения поправок Ρ1n.c, Ρ2n.c, соединены с соответствующими входами вычислителя 38 кинематических соотношений устройства 33 моделирования бокового движения, а выходы, на которых формируются значения поправок Ρ3n.c, Ρ4n.c., соединены с входами вычислителя 40 параметров движения устройства 34 моделирования продольного движения.
К выходу вычислителя 39 параметров траектории БПЛА устройства 34 моделирования продольного движения БПЛА, на котором формируется значение угла атаки α, подключены соответствующие входы вычислителя 35 коэффициентов перекрестных связей, а также вычислителя 36 параметров траектории и вычислителя 37 угловых скоростей, входящих в состав устройства 33 моделирования бокового движения БПЛА. Выход вычислителя 39, на котором формируется значение угла наклона траектории θ БПЛА, образует десятый выход имитатора 2 БПЛА, а его выход, на котором формируется значение высоты полета Yg, образует седьмой выход имитатора 2 БПЛА и, кроме этого, соединен с соответствующими входами вычислителя 35 коэффициентов перекрестных связей и вычислителя 36 параметров траектории устройства 33 моделирования бокового движения БПЛА.
Выходы вычислителя 40 параметров движения БПЛА устройства 34 моделирования продольного движения БПЛА, на которых формируются значение скорости полета БПЛА V, и значения проекций a X, a Y линейных ускорений, соединены с входами вычислителя 39 параметров траектории БПЛА, кроме этого, выход вычислителя 40 по сигналу скорости V, образующий девятый выход имитатора 2 БПЛА, соединен также с соответствующими входами вычислителя 35 коэффициентов перекрестных связей, вычислителя 36 параметров траектории БПЛА и вычислителя 38 кинематических соотношений и преобразования координат, а выход вычислителя 40 по сигналу a Y образует одиннадцатый выход имитатора 2 БПЛА.
Выходы вычислителя 40 параметров движения БПЛА, на которых формируются значение угла тангажа υ и значение скорости изменения угла тангажа ωZ, образуют соответственно шестой и третий выходы имитатора 2 БПЛА, кроме этого, выход вычислителя 40 по сигналу υ соединен с соответствующими входами вычислителя 35 коэффициентов перекрестных связей и вычислителя 38 кинематических соотношений и преобразования координат, а выход по сигналу ωZ соединен с соответствующим входом вычислителя 35 коэффициентов перекрестных связей.
Выход вычислителя 36 параметров траектории БПЛА устройства 33 моделирования бокового движения, на котором формируется значение проекции a Z линейного ускорения, образует двенадцатый выход имитатора 2 БПЛА, а выход, на котором формируется значение угла скольжения β, соединен с соответствующими входами вычислителя 35 коэффициентов перекрестных связей, вычислителя 37 угловых скоростей БПЛА и вычислителя кинематических соотношений и преобразования координат.
Выходы вычислителя 37 угловых скоростей устройства 33 моделирования бокового движения БПЛА, на которых формируются значения скоростей изменения угла крена ωX и угла курса ωY, образуют первый и второй выходы имитатора 2 БПЛА и, кроме этого, соединены с соответствующими входами вычислителя 38 кинематических соотношений и преобразования координат.
Выход вычислителя 38 кинематических соотношений и преобразования координат, на котором формируется значение угла крена γ, образует пятый выход имитатора 2 БПЛА и, кроме этого, соединен с соответствующими входами вычислителя 35 коэффициентов перекрестных связей и вычислителя 40 параметров движения устройства 34 моделирования продольного движения БПЛА.
Блок 3 контроля пролета предназначен для фиксации момента времени, когда дальность D между ЛА и объектом наблюдения в алгоритмах (1) равна 0, что соответствует моменту пролета ЛА над (или под) объектом наблюдения в вертикальной плоскости и слева или справа от объекта наблюдения в боковой плоскости. В этот момент на выходе блока 3 контроля пролета формируется сигнал окончания пуска. Блок 3 контроля пролета выполнен в виде триггера Шмидта.
Устройство 4 регистрации информации предназначено для визуального отображения траектории ЛА и основных регистрируемых при моделировании параметров - координат траектории и отклонений рулей - и представляет собой, например, видеотерминальный комплекс, на запоминающих устройствах которого организовано накопление массивов значений регистрируемых параметров с одновременным их выводом на экран устройства.
Устройство 5 обработки результатов испытаний предназначено для статистической обработки результатов испытаний с целью получения достоверных оценок о величинах бокового и вертикального промаха и определения вероятности встречи БПЛА с объектом наблюдения в конкретной серии электронных пусков.
Вычисление оценок осуществляется непосредственно по выходным сигналам имитатора 2 БПЛА, которыми являются в вертикальной плоскости величина Yg, а в горизонтальной - Zg. Для вертикальной плоскости вводится поправка на величину высоты над горизонтом радиолокационного центра отражения объекта наблюдения ygц. Таким образом, величины промахов равны:


при D=0
В качестве оценок величин вертикального промаха принимаются:
математическое ожидание

дисперсия

среднеквадратичное отклонение

Для оценки точности аппаратуры ЛА в боковой плоскости (величин бокового промаха) формулы аналогичны.
Вероятность встречи ЛА и объекта наблюдения при испытаниях определяется следующим образом. Фиксируются факты попадания ЛА в контуры объекта наблюдения nпоп и определяется вероятность встречи по известной формуле:

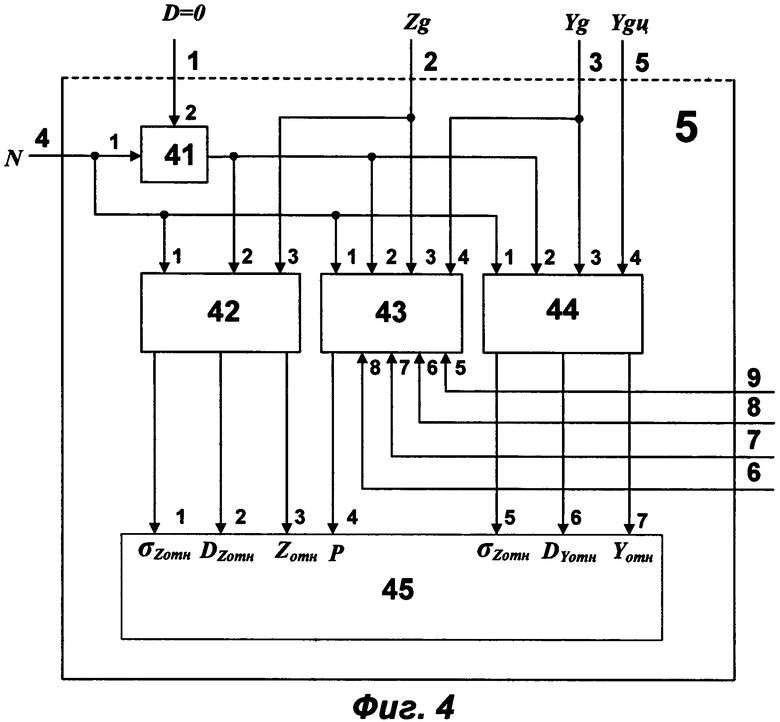
Устройство 5 обработки результатов испытаний (см. фиг.4) содержит счетчик 41 конечного кода, вычислитель 42 оценок бокового промаха, вычислитель 43 вероятности встречи, вычислитель 44 оценок вертикального промаха и индикатор 45.
Первый вход устройства 5 обработки результатов испытаний (по сигналу окончания пуска D=0) соединен со вторым (управляющим) входом счетчика 41 конечного кода, к выходу которого подключены вторые входы вычислителей 42 и 44 оценок бокового и вертикального промаха и вычислителя 43 вероятности встречи, первые входы которых и первый (счетный) вход счетчика 41 подключены к четвертому входу устройства 5 обработки результатов испытаний, на который поступает сигнал количества пусков N.
Третьи входы вычислителя 42 оценок бокового промаха и вычислителя 44 вероятности встречи образуют второй вход устройства 5 обработки результатов испытаний, на который поступает сигнал Zg бокового отклонения траектории БПЛА. К третьему входу устройства 5 обработки результатов испытаний, на который поступает сигнал Yg высоты полета БПЛА, подключены четвертый вход вычислителя 43 вероятности встречи и третий вход вычислителя 44 оценок вертикального промаха, четвертый вход которого образует пятый вход устройства 5 обработки результатов испытаний, на который поступает сигнал Ygц высоты радиолокационного центра отражения объекта наблюдения.
К входам с шестого по девятый устройства 5 обработки результатов испытаний, на которые поступают сигналы, характеризующие размеры объекта наблюдения, подключены входы с пятого по восьмой вычислителя 43 вероятности встречи, выход которого по сигналу Р вероятности встречи ЛА с объектом наблюдения подключен к четвертому входу индикатора 45.
Первый, второй и третий выходы вычислителей 42 и 44, на которых формируются сигналы математического ожидания (ZОТН и YОТН), дисперсии (DZОТН, DYОТН) и среднеквадратичного отклонения (σZОТН, σYОТН) величин бокового и вертикального промаха подключены к входам с первого по третий и входам с пятого по седьмой индикатора 45 соответственно.
Счетчик 41 конечного кода предназначен для подсчета количества произведенных пусков в серии и выдачи управляющего сигнала, когда на его управляющий (второй) вход поступает сигнал окончания пуска с блока 3 контроля пролета.
Вычислители 42 и 44 оценок бокового и вертикального промаха идентичны по структуре (см. фиг.4) и различаются наличием дополнительного, четвертого, входа у вычислителя 44 оценок вертикального промаха.
Каждый вычислитель 42 (44) оценок промаха содержит блок 46 формирования управляющих сигналов, таймер 47, вычислитель 48 среднеквадратичного отклонения, сумматор 49, квадратор 50, вычислитель 51 дисперсии, блок 52 памяти, сумматор 53, масштабный блок 54.
Вход блока 46 формирования управляющих сигналов соединен со вторым входом вычислителя 42 (44) оценок промаха, а к его выходам с первого по четвертый подключены первые входы блока 52 памяти, сумматора 53, масштабного блока 54 и таймера 47 соответственно. К третьему входу вычислителей 42, 44 оценок промаха (сигнал Zg или Yg) подключен второй вход блока 52 памяти, выход которого непосредственно соединен со вторым входом сумматора 49 и через сумматор 53 соединен со вторым входом масштабного блока 54. Третий вход блока 52 памяти образует четвертый вход вычислителя 44 оценок вертикального промаха (сигнал Ygц).
Третий вход масштабного блока 54 и вторые входы вычислителя 51 дисперсии и таймера 47 соединены с первым входом вычислителей 42, 44 оценок промаха, на который поступает сигнал количества пусков N. К выходам таймера 47 с первого по четвертый подключены первые входы сумматора 49, квадратора 50, вычислителя 51 дисперсии и вычислителя 48 среднеквадратичного отклонения соответственно.
Третий вход вычислителя 51 дисперсии соединен с выходом квадратора 50, второй вход которого соединен с выходом сумматора 49, а третий вход - с выходом масштабного блока 54, который одновременно является первым выходом вычислителей 42, 44 оценок промаха. Выход вычислителя 51 дисперсии, образующий второй выход вычислителей 42, 44 оценок промаха, соединен также со вторым входом вычислителя 48 среднеквадратичного отклонения, выход которого образует третий выход вычислителей 42, 44 оценок промаха.
На выходах вычислителя 42 оценок бокового промаха формируются сигналы величин математического ожидания ZОТН (первый выход), дисперсии DZОТН (второй выход) и среднеквадратичного отклонения σZОТН) (третий выход) летательного аппарата относительно объекта наблюдения в горизонтальной плоскости, а на выходах вычислителя 44 вертикального промаха - аналогичные сигналы ZОТН, DYОТН, σYОТН, характеризующие промах в вертикальной плоскости.
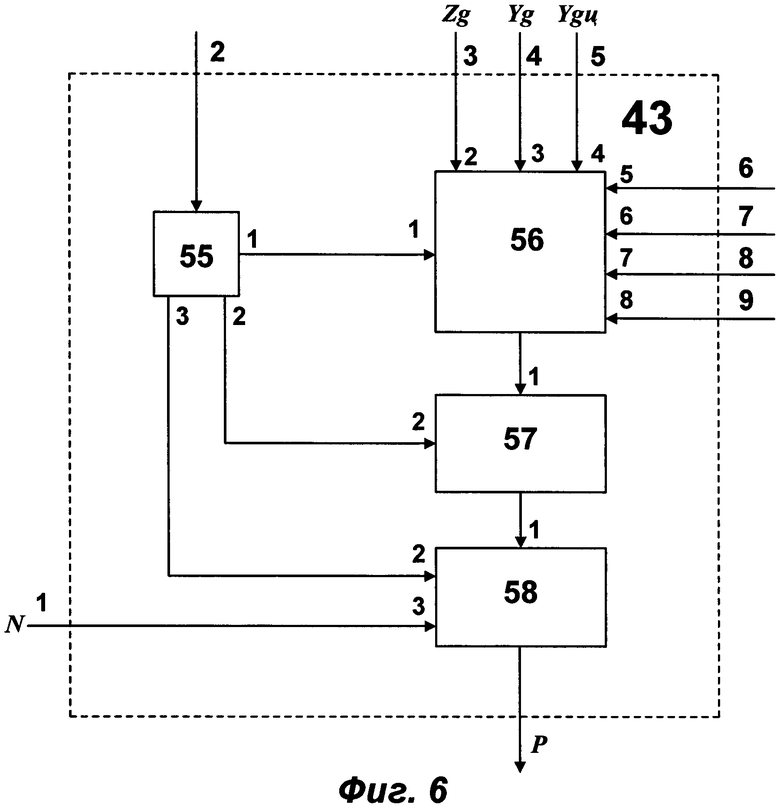
Вычислитель 43 вероятности встречи (см. фиг.6) содержит блок 55 формирования управляющих сигналов, блок 56 сравнения, блок 57 памяти и блок 58 деления.
Вход блока 55 формирования управляющих сигналов соединен со вторым входом вычислителя 43 вероятности встречи, его первый выход соединен с первым входом блока 56 сравнения, а второй и третий выходы - со вторыми входами блока 57 памяти и блока 58 деления соответственно. Первый вход вычислителя 43 вероятности встречи (по сигналу количества пусков N) соединен с третьим входом вычислителя 43 вероятности встречи, а третий, четвертый и пятый входы (сигналы Zg, Yg, Ygц), и входы с шестого по девятый (сигналы размеров объекта наблюдения) соединены соответственно со вторым, третьим и четвертым входами и входами с пятого по восьмой блока 56 сравнения. Выход блока 56 сравнения соединен с первым входом блока 57 памяти, выход которого подключен к первому входу блока 58 деления, а выход блока 58 деления, на котором формируется сигнал вычисленной вероятности встречи P, является выходом вычислителя 43 вероятности встречи.
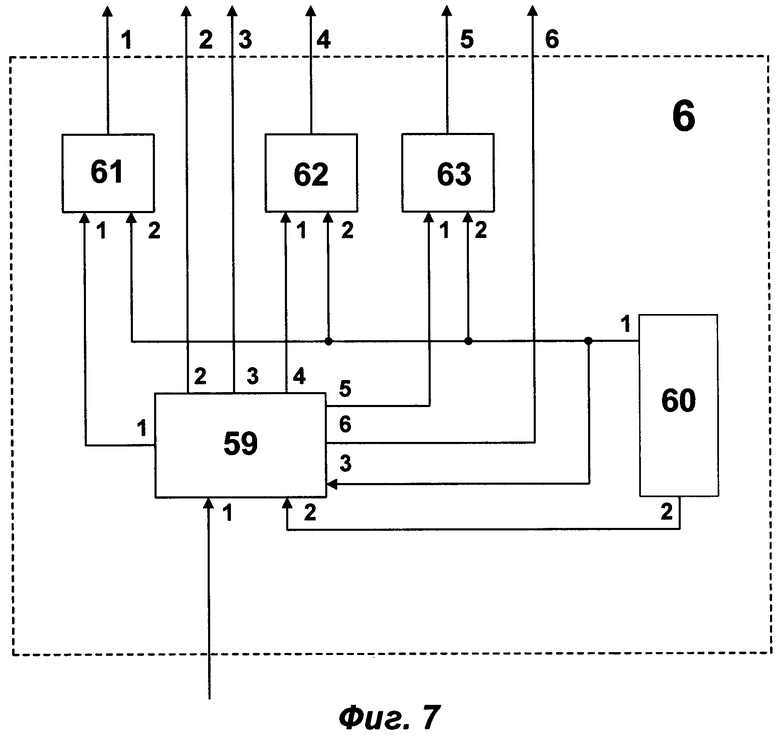
Блок 6 задания режимов (фиг.7), входящий в состав устройства 7 управления испытаниями, содержит таймер 59, задатчик 60 циклограмм и такта вычислительных операций и блоки 61, 62, 63 согласования.
Первый вход таймера 59 является входом блока 6 задания режимов, а его второй и третий входы соединены со вторым (по сигналу, задающему циклограмму) и первым (по сигналу, задающему такт) задатчика 60 циклограмм и такта вычислительных операций, выполненного в виде управляемого распределителя напряжений. К тактовому выходу задатчика 60 подключены также вторые входы блоков 61, 62 и 63 согласования. Первый, четвертый и пятый выходы таймера 59 соединены с первыми входами блоков 61, 62 и 63 согласования соответственно. Выходы блоков 61, 62 и 63 согласования являются соответственно первым, четвертым и пятым выходами блока 6 задания режимов. Второй, третий и шестой выходы таймера 59 образуют соответственно второй, третий и шестой выходы блока 6 задания режимов.
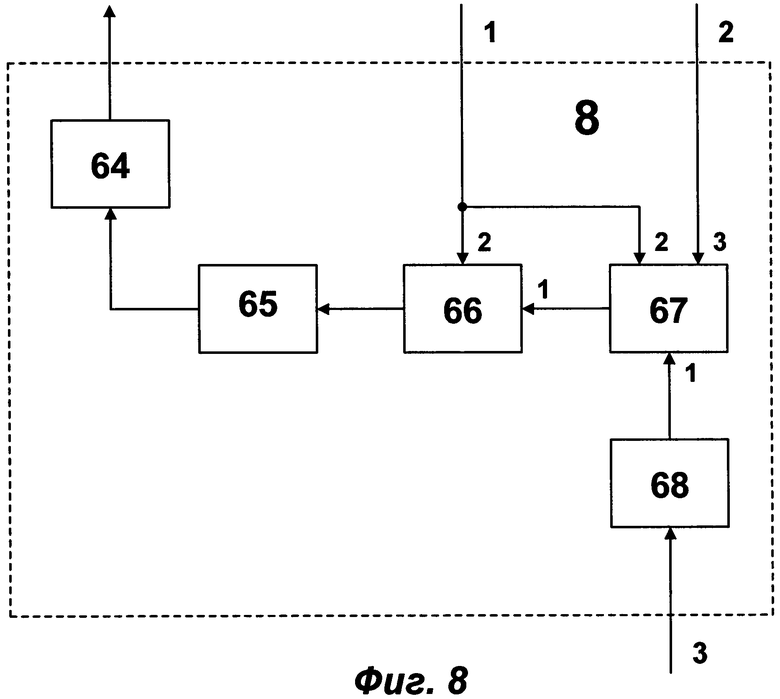
Блок 8 формирования серии пусков, входящий в состав устройства 7 управления испытаниями (фиг.8), содержит формирователь 64 сигнала, устройство 65 задержки, ключ 66, счетчик 67 и формирователь 68 сигнала.
Третий вход устройства 8 управления (по сигналу запуска) является входом формирователя 68 сигнала, выход которого подключен к входу счетчика 67, выход которого соединен с входом ключа 66. Вторые входы ключа 66 и счетчика 67 служат первым входом устройства 8 управления испытаниями (по сигналу окончания пуска). Выход ключа 66 через устройство 65 задержки соединен с формирователем 64, выход которого является выходом устройства 8 управления испытаниями. Третий вход счетчика 67 является вторым входом устройства 8 управления испытаниями (по сигналу количества пусков).
Задатчик 9 параметров объекта наблюдения предназначен для ввода в моделирующий комплекс габаритных и радиотехнических характеристик объекта наблюдения, а также количества пусков для получения достоверных оценок системы. Задатчик 9 параметров объекта наблюдения представляет собой устройство, входным блоком которого является аналого-цифровой преобразователь, выход которого соединен с блоками памяти. В каждом блоке памяти записаны значения начальных или программных величин.
Имитатор 15 датчиков угловых скоростей, имитатор измерителей 16 углов и имитатор измерителей 17 линейных ускорений предназначены для имитации динамики реальных приборов исследуемой системы управления ЛА. Они реализуют хорошо известные передаточные функции [3, 4] и выполнены на основе программных или аппаратных средств.
Имитатор 12 радиовысотомера предназначен для воспроизведения условий движения летательного аппарата над поверхностью и реализует известную передаточную функцию [3, 4]. Входным блоком имитатора 12 радиовысотомера является сумматор, другой вход которого соединен с имитатором 13 подстилающей поверхности. Сигнал, поступающий на первый вход сумматора имитатора 13 радиовысотомера, пропорциональный сигналу yg, вырабатываемому имитаторам 2 ЛА, складывается с сигналом yм, вырабатываемым имитатором 13 подстилающей поверхности. На выходе имитатора 12 радиовысотомера формируется сигнал высоты полета ЛА над подстилающей поверхностью - H (например, морем).
Имитатор 13 подстилающей поверхности и имитатор 11 ветровых порывов представляют собой генераторы случайных сигналов.
Имитатор 14 рулевых механизмов воспроизводит динамику рулевых приводов, приводящих в движение рули высоты, направления и элероны. Имитатор 14 рулевых механизмов содержит имитатор привода курса, имитатор привода крена и имитатор привода тангажа, выходы которых являются соответствующими выходами имитатора 14 рулевых механизмов, а входы образуют соответствующие входы имитатора 14 рулевых механизмов. Имитаторы приводов реализуют известные передаточные функции [6] и выполнены на основе программных или аппаратных средств.
Устройство 18 выработки сигналов управления предназначено для формирования сигналов управления рулевыми механизмами и является прибором исследуемой СУ ЛА. Устройство 18 выработки сигналов управления содержит три канала управления: рулями высоты, направления и элеронами, соответственно. Алгоритмы формирования законов управления для большинства беспилотных ЛА широко известны и имеют вид [3, с.78, рис.4.4]:






где Kϑ, Kϑ, Tz, Kh, Th, Ksh, Kny, Kψ, Kψ', Tψ, Kγ, Kγ', Tγ передаточные коэффициенты; nz, ny, nz', - перегрузки; δпр, Hпр(t), ϑ1, ψ1 - программные значения соответствующих параметров, определяющие закон движения ЛА; знаком (') - помечены сигналы, поступающие с имитаторов приборов реальной аппаратуры СУ.



где Kϑy, Kωz - передаточные коэффициенты; ϑA0, ϑ0 - суть в момент начала наведения в "продольной задаче" на объект наблюдения; ϑпр и αуст - установочные значения параметров.



где Kψy - передаточные коэффициенты; ψA0 - малая константа (например, ψA0=0,5 град), ψ0 - угол курса в момент "упреждения".
Структурная схема устройства 18 выработки сигналов управления представлена на фиг.11, где обозначены:
69 - таймер,
70 - сумматор,
71 - блок памяти,
72 - дифференциатор,
73 - функциональный блок, выполненный в виде вычислителя, в котором производится вычисление соотношений (5.7) и (5.8);
74 - дифференциатор,
75 - сумматор,
76, 77 - дифференциаторы,
78 - интегратор,
79 - сумматор,
80 - функциональный блок, выполненный в виде вычислителя, в котором производится вычисление соотношений (5.10), (5.11) и (5.12);
81 - сумматор,
82, 83 - масштабные блоки,
84 - сумматор,
85 - функциональный блок, выполненный в виде вычислителя, в котором производится вычисление соотношения (5.9);
86, 87, 88 - сумматоры,
89 - масштабный блок,
90, 91 - сумматоры.
Вход таймера 69 соединен с двенадцатым (управляющим) входом устройства 18 выработки сигналов управления, а к соответствующим выходам таймера подключены первые входы всех блоков, входящих в состав устройства 18. Девятый вход устройства 18 через масштабный блок 83 подключен ко второму входу сумматора 88, третий вход которого соединен с выходом сумматора 84. Третий вход сумматора 84 через функциональный блок 85 соединен с выходом функционального блока 73, а второй вход соединен с шестым входом функционального блока 73 и подключен к первому входу устройства 18 выработки сигналов управления.
Седьмой, восемнадцатый, четырнадцатый, тринадцатый и четвертый входы устройства 18 соединены соответственно с входами со второго по пятый и седьмым входом функционального блока 73, а пятнадцатый вход через масштабный блок 89 подключен к седьмому входу сумматора 88. Четвертый вход сумматора 88 подключен к выходу сумматора 86, третий вход которого подключен к выходу дифференциатора 76, выход которого соединен со вторым входом сумматора 88 и подключен к четвертому входу устройства 18 выработки сигналов управления.
Шестнадцатый и одиннадцатый входы устройства 18 выработки сигналов управления соединены соответственно со вторым входом сумматора 70 и вторым входом блока 71 памяти, выход которого подключен к третьему входу сумматора 70. К выходу сумматора 70 непосредственно подключены вторые входы интегратора 78 и сумматора 87 и через дифференциатор 77 подключен третий вход сумматора 87, а выход сумматора 87 и выход интегратора 78 соединены соответственно с пятым и шестым входами сумматора 88, выход которого является первым выходом устройства 18 выработки сигналов управления (по сигналу управления рулем высоты - σВ).
К восьмому, семнадцатому и восемнадцатому входам устройства 18 выработки сигналов управления подключены третий, четвертый и пятый входы функционального блока 80, шестой вход которого, соединенный со вторыми входами сумматора 81 и дифференциатора 74, подключен к пятому входу устройства 18 выработки сигналов управления. Выход дифференциатора 74 соединен с третьим входом сумматора 81, а выход функционального блока 80 соединен с третьим входом сумматора 79, второй вход которого и второй вход функционального блока 80 соединены со вторым входом устройства 18 выработки сигналов управления. Выходы сумматоров 79 соединены соответственно со вторым и третьим входами сумматора 90, четвертый вход которого через масштабный блок 82 соединен с десятым входом устройства 18 выработки сигналов управления, вторым выходом которого (по сигналу управления рулем направления - σН) является выход сумматора 90.
Шестой вход устройства 18 выработки сигналов управления соединен со вторыми входами сумматора 75 и дифференциатора 72, выход которого соединен с третьим входом сумматора 75. Выход сумматора 75 подключен ко второму входу сумматора 91, третий вход которого соединен с третьим входом устройства 18 выработки сигналов управления, а выход образует третий выход устройства 18 (по сигналу управления элеронами - σЭ).
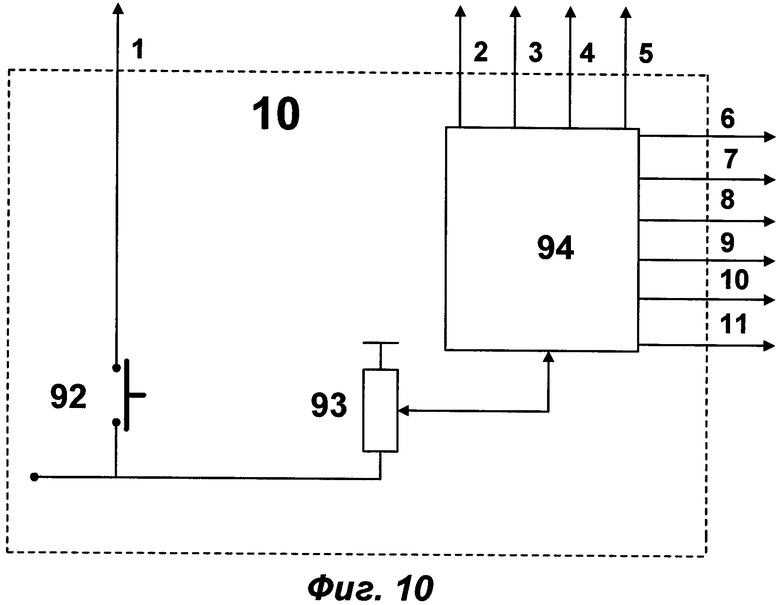
Пульт 10 управления (см. фиг.10), входящий в состав устройства 7 управления испытаниями, содержит кнопку 92 "Пуск", потенциометр 93 "Начальные условия" и задатчик 94 параметров, соединенные с источником питания. Выход кнопки 92 является первым выходом пульта 10 управления, выход потенциометра 93 подключен к входу задатчика 94 параметров, выходы которого являются выходами со второго по одиннадцатый пульта 10 управления.
Задатчик 94 параметров представляет собой устройство, входным блоком которого является аналого-цифровой преобразователь, выход которого соединен с блоками памяти. В каждом блоке памяти записаны значения начальных или программных величин.
Предлагаемый моделирующий комплекс работает следующим образом.
Вначале в соответствии с программой проведения моделирования осуществляется настройка комплекса.
Выбирается тип решаемой задачи, для чего движок потенциометра 93 пульта 10 управления устанавливается в положение, соответствующее выбранной задаче. При этом с выходов ячеек памяти задатчика 94 параметров в устройство 18 выработки сигналов управления поступают сигналы, соответствующие программным параметрам траектории движения БПЛА в алгоритмах (5), а в имитатор 1 измерителя координат объекта наблюдения - сигналы начальной установки дальности до объекта наблюдения и параметров относительного движения объекта наблюдения и БПЛА в алгоритмах (1).
Из задатчика 9 параметров объекта наблюдения в устройство 5 обработки результатов испытаний вводятся параметры объекта наблюдения - длина, высота и высота радиолокационного центра отражения объекта наблюдения, а также количество пусков в серии испытаний, достаточных для получения достоверных оценок в алгоритмах (4). Длина и высота объекта наблюдения вводятся как проекции контура объекта наблюдения на плоскость, перпендикулярную строительной оси БПЛА, величинами длин влево, вправо, вверх и вниз относительно радиолокационного центра отражения объекта наблюдения.
Из задатчика 60 циклограмм и тактов вычислительных операций блока 6 задания режимов вводятся сигналы, задающие режим проведения моделирования. При этом в зависимости от априорной информации (полученной, например, с помощью математического моделирования СУ БПЛА) устанавливается или режим реального времени или "старт-стопный" режим.
В режиме реального времени имитаторы моделирующего комплекса вырабатывают сигналы, обеспечивающие возможность функционирования устройства 18 выработки сигналов управления в штатном режиме. В этом режиме оператор контролирует протекание процессов моделирования на экране устройства 4 регистрации информации и оценивает качество системы управления БПЛА по конечному промаху, расчетные значения которого - боковое отклонение летательного аппарата относительно объекта наблюдения и высота пролета над (под) ним - отображаются на индикаторе 45 устройства 5 обработки результатов испытаний. Правильность протекания процессов моделирования в простейшем случае визуально оценивается на экране устройства 4 регистрации информации по траектории движения ЛА (параметры yg и zg) и отклонениям рулей ЛА (сигналы δн, δВ, δЭ углов закладки рулей направления, высоты и элеронов), при этом контролируется их совпадение с траекторией, полученной в результате математического моделирования, а также неразрывность их графиков (т.к. как очевидно из физики процессов движения объектов, что они должны быть непрерывными).
В "старт-стопном" режиме моделирующий комплекс функционирует таким образом, что одному такту работы устройства 18 выработки сигналов управления соответствует несколько тактов работы имитаторов, т.е. блок 6 задания режимов вырабатывает такую последовательность команд, по которой осуществляется корректный запуск и остановка всех устройств комплекса.
Под корректной остановкой понимается такое прерывание процесса моделирования, когда завершены все операции решения системы уравнений, описывающих процессы работы того или иного устройства комплекса. При этом существенно повышается точность моделирования, т.к. известно, что за счет уменьшения шага решения уравнений (увеличения тактов работы вычислительных устройств имитаторов) можно существенно (на порядок) повысить точность их решения и соответственно существенно повысить точность моделирования по сравнению с работой в реальном времени. Кроме того, за счет замедления протекания всех процессов оператору легче контролировать их правильность (например, сравнивая с принятым за эталон математическим). В обоих режимах оператор может путем подачи команды со второго выхода задатчика 60 циклограмм и такта вычислительных операций корректно остановить процесс моделирования, проанализировать результат и запустить процесс вновь. При этом сигнал с первого выхода задатчика 60 (который задается оператором при настройке комплекса) определяет тактность работы вычислительных устройств имитаторов (замедление процессов моделирования).
При нажатии кнопки 92 "Пуск" пульта 10 управления осуществляется запуск комплекса. Вначале сигнал с первого выхода пульта 10 управления через формирователь 68 в блоке 8 формирования серии пусков (см. фиг.8) поступает на первый вход счетчика 67, на второй и третий входы которого поступают соответственно сигнал с выхода блока 3 контроля пролета (фиксирующий окончание пуска системы) и сигнал с первого выхода задатчика 9 параметров объекта наблюдения (определяющий количество пусков в цикле испытаний - N). Если количество произведенных пусков системы будет равно заданному количеству пусков, то сигнал на выходе счетчика 67 будет равен нулю. Так как в первый момент они не равны, то запускающий сигнал с выхода счетчика 67 через ключ 66, устройство 65 задержки и формирователь 64 поступает на вход блока 6 задания режимов, который задает циклограмму работы комплекса.
В блоке 6 задания режимов (см. фиг.7) этот сигнал поступает на первый вход таймера 59, который запускается с частотой, задаваемой сигналом, поступающим на его третий вход с первого выхода задатчика 60 циклограмм и такта вычислительных операций. На первом - шестом выходах управляемого таймера 59 появляется последовательность сигналов, определяющих циклограмму включения и работы приборов моделирующего комплекса.
Вначале появляется сигнал на первом выходе таймера 59, который поступает на первый вход блока 61 согласования, на второй вход которого поступает сигнал, определяющий тактность решения системы уравнений (1)-(3), описывающих движение БПЛА и объекта наблюдения. На выходе блока 61 согласования из этих двух сигналов формируется кодовая последовательность, поступающая в имитаторе 1 измерителя координат объекта наблюдения на вход управляемого таймера 19, а в имитаторе 2 летательного аппарата - на входы управляемых таймеров, входящих в состав вычислителей 35,…, 40.
В соответствии с этим сигналом на первых выходах вышеуказанных таймеров формируются сигналы, устанавливающие шаг решения уравнений (1)-(3), а затем на вторых выходах таймеров появляются сигналы, которые определяют порядок решения уравнений (1)-(3). Сигналы на первых выходах указанных таймеров являются кодовыми и определяют циклограммы работы имитатора 1 измерителя координат объекта наблюдения и устройств 33 и 34 моделирования бокового и продольного движения БПЛА. Формируемые на вторых выходах таймеров последовательности управляющих сигналов обеспечивают согласованное выполнение всех вычислительных операций с учетом перекрестных связей между каналами продольного и бокового управления БПЛА.
После того как имитатором 1 измерителя координат объекта наблюдения и имитатором 2 БПЛА будут закончены решения уравнений (1)-(3) на одном такте, на втором и третьем выходах таймера 59 появятся сигналы, управляющие запуском имитатора 11 ветровых порывов и имитатора 13 подстилающей поверхности, а на его четвертом выходе появляется сигнал, поступающий на первый вход блока 62 согласования, в котором аналогично блоку 61 формируется кодовая последовательность, поступающая на управляющие входы имитатора 15 датчиков угловых скоростей, имитатора 16 измерителя углов, имитатора 17 измерителя линейных ускорений и имитатора 12 радиовысотомера. Вышеуказанные имитаторы также запускаются на один такт решения реализованных в них алгоритмов.
Затем появляется сигнал на шестом выходе таймера 59, запускающий таймер 69 в устройстве 18 выработки сигналов управления, который обеспечивает выполнение жестко заданной циклограммы работы устройства 18, согласованной с циклограммой работы приборов СУ БПЛА.
Завершается процесс появлением сигнала на пятом выходе таймера 59, который через блок 63 согласования запускает имитатор 14 рулевых механизмов также на один такт.
Сигналы углов закладки рулей высоты, направления и элеронов с выходов имитатора 14 рулевых механизмов поступают на соответствующие входы имитатора 2 БПЛА, замыкая контур моделирования. Описанный выше процесс повторяется многократно по сигналам, вырабатываемым таймером 59, и таким образом имитируется в реальном времени процесс полета БПЛА и его сближения с объектом наблюдения при воздействии внешних возмущений (таких как, например, ветровые порывы и волнение моря).
В "старт-стопном" режиме циклограмма работы комплекса, формируемая таймером 59, организована таким образом, что нескольким тактам работы имитатора 1 измерителя координат объекта наблюдения, имитатора 2 ЛА, имитатора 15 датчиков угловых скоростей, имитатора 16 измерителя углов, имитатора 17 измерителя линейных ускорений, имитатора 12 радиовысотомера и имитатора 14 рулевых механизмов соответствует один такт работы устройства 18 выработки сигналов управления и, следовательно, процесс имитации полета ЛА и его сближения с объектом наблюдения растягивается во времени, причем основной исследуемый прибор СУ - устройство 18 выработки сигналов управления работает в режиме реального времени, но дискретно (то запускается, то останавливается).
В результате многократного повторения описанного процесса как в режиме реального времени, так и в "старт-стопном" режиме, в имитаторах 2 и 1 по исходным данным в соответствии с алгоритмами (1)-(3) вырабатываются сигналы о положении ЛА в пространстве и его относительной скорости движения, о текущей дальности объекта наблюдения, а также об углах ψA или ϑA визирования объекта наблюдения, которые поступают в устройство 18 выработки сигналов управления.
Сигналы, пропорциональные углам поворота корпуса БПЛА, угловым скоростям и линейным ускорениям корпуса БПЛА, вычисляются с учетом воздействия на БПЛА внешних возмущающих факторов (ветровых порывов) и взаимного влияния (перекрестных связей) между каналами управления в результате скоординированного взаимодействия устройств 33 и 34 моделирования бокового и продольного движения ЛА через арифметические блоки вычислителя 35, реализующие поправки P1n.c, P2n.c, P3n.c, P4n.c в алгоритмах (2)-(3) бокового и продольного управления БПЛА.
Выходные сигналы углов курса, крена и тангажа, скоростей изменения углов курса и крена и тангажа, линейных ускорений, вырабатываемые имитатором 2 летательного аппарата, поступают в имитаторы 15, 16 и 17, выходные сигналы которых поступают на соответствующие входы устройства 18 выработки сигналов управления.
Сигнал Yg, пропорциональный текущей высоте полета ЛА, поступает из имитатора 2 БПЛА на вход имитатора 12 радиовысотомера, в котором после его суммирования с сигналом, имитирующим подстилающую поверхность, формируется сигнал Н, пропорциональный текущей высоте полета ЛА над подстилающей поверхностью, который поступает в устройство 18 выработки сигналов управления.
В устройстве 18 выработки сигналов управления в соответствии с алгоритмами (5) вырабатываются сигналы, управляющие силовыми приводами рулевых механизмов ЛА, которые через имитатор 14 рулевых механизмов поступают в имитатор 2 БПЛА и выводятся на экран устройства 4 регистрации информации.
В процессе испытаний сигналы, характеризующие движение БПЛА по траектории (yg и zg) с 7-го и 8-го выходов имитатора 2 ЛА, а также сигналы углов закладки рулей высоты, направления и элеронов с выходов имитатора 14 рулевых механизмов поступают на входы устройства 4 регистрации информации для визуального контроля траектории движения ЛА.
Сигнал текущей дальности с третьего выхода имитатора 1 поступает на вход блока 3 контроля пролета. В момент встречи летательного аппарата с объектом наблюдения, когда текущая дальность D будет равна нулю, на выходе блока 3 контроля пролета появится сигнал окончания пуска, который поступает на первый вход блока 8 формирования серии пусков. По этому сигналу срабатывает ключ 66, и с выхода блока 8 снимается управляющий сигнал. При этом комплекс возвращается в исходное состояние. Если количество произведенных пусков еще не равно количеству заданных пусков N и существует сигнал на выходе счетчика 67, то после возвращения системы в исходное состояние и возвращения ключа 66 в исходное состояние (т.к. сигнал дальности D не равен 0) на выходе блока 8 формирования серии пусков, вновь появится сигнал, произойдет следующий запуск комплекса при тех же начальных условиях, и процесс повторится вновь.
Процесс моделирования испытаний аппаратуры ЛА будет продолжаться до тех пор, пока количество проведенных пусков не будет равно количеству заданных пусков N. В этот момент исчезнет сигнал на выходе счетчика 67 и соответственно исчезнет сигнал на выходе блока 8 формирования серии пусков. На этом серия пусков завершается, а комплекс переходит в режим обработки результатов.
Сигнал окончания пуска поступает также и на второй вход счетчика 41 конечного кода, на выходе которого в момент равенства количества проведенных пусков количеству заданных пусков N появляется сигнал, поступающий на входы блоков 46 формирования управляющих сигналов в вычислителях 42 и 44 оценок бокового и вертикального промаха и вход блока 55 формирования управляющих сигналов в вычислителе 43 вероятности встречи (см. фиг.4, 5, 6). В этот момент в блоке 52 памяти вычислителя 42 оценок бокового промаха фиксируется текущее значение бокового отклонения ЛА (Zg), в блоке 52 памяти вычислителя 44 оценок вертикального промаха фиксируется текущее значение высоты полета БПЛА (Yg), а в блоке 56 сравнения вычислителя 43 вероятности встречи обе указанные координаты сравниваются с координатами объекта наблюдения, задаваемыми задатчиком 9, после чего фиксируются в блоке 57 памяти.
Далее в вычислителях 42, 44 оценок точности определяются по формулам (4.1)-(4.5) значения математического ожидания, дисперсии и среднеквадратичного отклонения величин бокового и вертикального промаха, а в вычислителе 43 вероятности встречи по формуле (4.6) определяется значение величины вероятности попадания в цель. Расчетные значения всех указанных величин индицируются на экране индикатора 45. На этом испытания в данной серии испытаний завершаются.
Предлагаемый моделирующий комплекс для проверки системы управления ЛА обеспечивает высокую точность и достоверность испытаний, возможность многократного (в сотни раз) увеличения объема испытаний реальной аппаратуры ЛА, по сравнению с натурными экспериментами, и получения объемов данных, достаточных для статистической обработки. При этом повышается достоверность проведения наземных испытаний при меньшей трудоемкости.
Промышленная применимость изобретения определяется тем, что предлагаемый моделирующий комплекс может быть изготовлен на основании приведенного описания и чертежей при использовании известных комплектующих изделий и известного технологического оборудования и использован в качестве моделирующего комплекса для проверки системы управления беспилотного летательного аппарата.
СПИСОК ЛИТЕРАТУРЫ
1. Шалыгин А.С., Палагин Ю.И. Прикладные методы статистического моделирования. - Л.: Машиностроение, Ленинград. Отделение, 1986.
2. Патент РФ №2163732, МПК G06G 7/72, G09B 9/08, публикация 27.02.2001 г., прототип.
3. Лебедев А.А., Чернобровкин А.С. Динамика полета, Оборонгиз, М., 1962 г. с.403-404, 473-474.
4. Кузовков Н.Г. Система стабилизации летательных аппаратов (баллистических и зенитных ракет). М.: Высшая школа, 1976 г.
5. Справочник по радиоэлектронике. Под общ. ред. А.А.Куликовского. т.3. М., Энергия, 1970 г., с.558-565.
6. Гамынин Н.С. Гидравлический привод систем управления. М., Машиностроение, 1976 г., с.11, рис.4.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| ИМИТАЦИОННАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ВОЗДУШНОЙ МИШЕНЬЮ НА ОСНОВЕ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ИЗ СОСТАВА МИШЕННОГО КОМПЛЕКСА | 2020 |
|
RU2782035C2 |
| Комплекс полунатурного моделирования движения авиационного средства поражения | 2021 |
|
RU2767712C1 |
| Моделирующий комплекс для отладки системы управления автономным подвижным объектом | 2017 |
|
RU2662331C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОЙ НАГРУЗКИ НА ВОЗДУШНЫЙ ОБЪЕКТ | 2022 |
|
RU2784492C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |


Изобретение относится к средствам моделирования систем управления беспилотных летательных аппаратов. Техническим результатом является повышение точности испытаний устройства при выработке сигналов управления. Моделирующий комплекс содержит устройства моделирования бокового и продольного движений в составе имитатора БПЛА, имитатор рулевых механизмов, имитатор измерителя координат объекта наблюдения, имитатор датчиков угловых скоростей, имитатор измерителей углов, имитатор измерителей линейных ускорений, имитатор ветровых порывов, имитатор подстилающей поверхности, имитатор радиовысотомера, устройство выработки сигналов управления, блок контроля пролета, устройство обработки результатов испытаний, устройство управления испытаниями, устройство регистрации информации, блок задания режимов, вычислитель коэффициентов перекрестных связей, вычислитель оценок вертикального промаха и индикатор. 10 ил.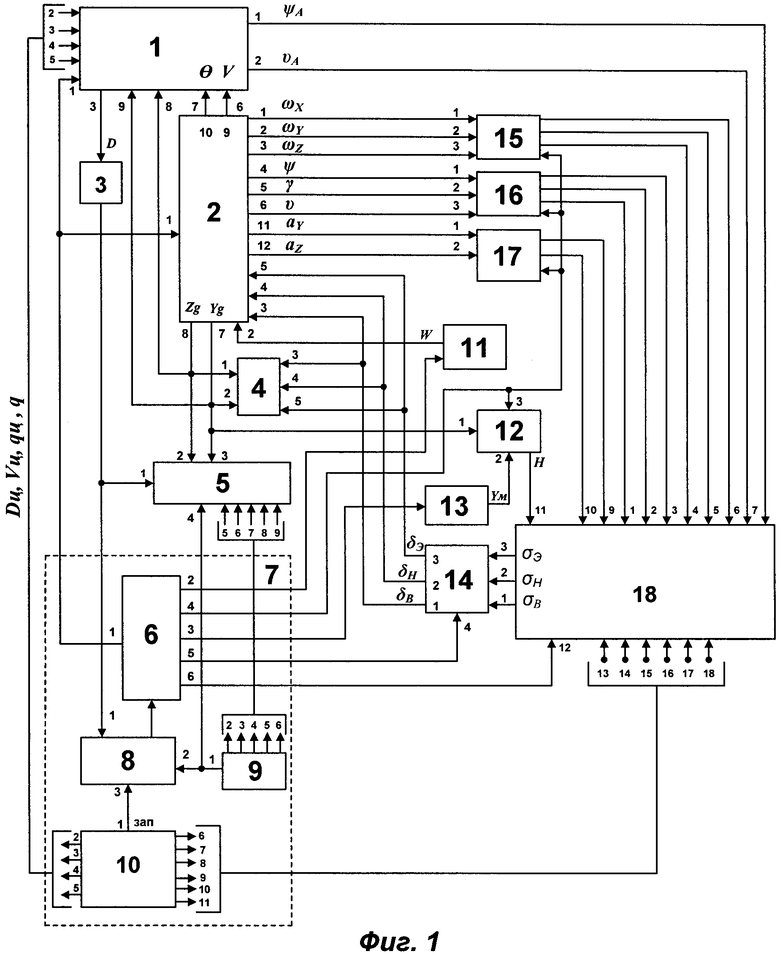
Моделирующий комплекс для проверки системы управления беспилотного летательного аппарата (БПЛА), содержащий устройство моделирования бокового движения БПЛА и устройство моделирования продольного движения БПЛА, входящие в состав имитатора БПЛА, имитатор рулевых механизмов, имитатор измерителя координат объекта наблюдения, имитатор датчиков угловых скоростей, имитатор измерителей углов, имитатор измерителей линейных ускорений, имитатор ветровых порывов, имитатор подстилающей поверхности, имитатор радиовысотомера, устройство выработки сигналов управления, блок контроля пролета, устройство обработки результатов испытаний, в состав которого входят счетчик конечного кода, вычислитель вероятности встречи и вычислитель оценок промаха, а также устройство управления испытаниями, в состав которого входят пульт управления, задатчик параметров объекта наблюдения и блок формирования серии пусков, при этом первый выход пульта управления соединен с входом запуска блока формирования серии пусков, выходы пульта управления, на которых формируются сигналы программных параметров траектории БПЛА, подключены к соответствующим входам устройства выработки сигналов управления, а выходы, на которых формируются сигналы начальной установки дальности и параметров относительного движения объекта наблюдения и БПЛА - к соответствующим входам имитатора измерителя координат объекта наблюдения, выходы которого по сигналам измеренных углов места и азимута объекта наблюдения подключены к соответствующим входам устройства выработки сигналов управления, а выход по сигналу текущей дальности объекта наблюдения подключен к входу блока контроля пролета, выходы устройства моделирования продольного движения, на которых формируются сигналы скорости и угла наклона траектории БПЛА, соединены с соответствующими входами имитатора измерителя координат объекта наблюдения, выходы устройства моделирования бокового движения БПЛА, на которых формируются сигналы скоростей изменения углов крена и курса, и выход устройства моделирования продольного движения БПЛА, на котором формируется сигнал скорости изменения угла тангажа, подключены к соответствующим входам имитатора датчиков угловых скоростей, выходы устройства моделирования бокового движения, на которых формируются сигналы углов курса и крена, и выход устройства моделирования продольного движения, на котором формируется сигнал угла тангажа, соединены с входами имитатора измерителей углов, выходы устройств моделирования бокового и продольного движения БПЛА, на которых формируются сигналы соответствующих проекций линейных ускорений БПЛА в земной системе координат, соединены с входами имитатора измерителей линейных ускорений, выход устройства моделирования бокового движения БПЛА, на котором формируется сигнал бокового отклонения траектории БПЛА, соединен с соответствующими входами имитатора измерителя координат объекта наблюдения и устройства обработки результатов испытаний, выход устройства моделирования продольного движения БПЛА, на котором формируется сигнал высоты полета БПЛА, соединен с соответствующими входами имитатора измерителя координат объекта наблюдения, устройства обработки результатов испытаний и имитатора радиовысотомера, второй информационный вход которого соединен с выходом имитатора подстилающей поверхности, кроме этого, выходы устройства моделирования продольного движения БПЛА, на которых формируются сигналы угла атаки и угла тангажа, сигналы скорости и высоты полета БПЛА, а также его вход по сигналу угла крена БПЛА соединены с соответствующими входами и выходом устройства моделирования бокового движения БПЛА, выход имитатора ветровых порывов соединен с соответствующими входами устройств моделирования бокового и продольного движения БПЛА, выходы имитатора датчиков угловых скоростей, имитатора измерителей углов, имитатора измерителей линейных ускорений и имитатора радиовысотомера подключены к соответствующим входам устройства выработки сигналов управления, выходы которого по сигналам управления рулями высоты, направления и элеронами, соединены с соответствующими входами имитатора рулевых механизмов, выход имитатора рулевых механизмов, на котором формируется сигнал угла закладки руля высоты, соединен с соответствующим входом устройства моделирования продольного движения БПЛА, а выходы, на которых формируются сигналы углов закладки руля направления и элеронов - с соответствующими входами устройства моделирования бокового движения БПЛА, выход блока контроля пролета, на котором формируется сигнал окончания пуска, соединен с соответствующими входами устройства обработки результатов испытаний и блока формирования серии пусков, входы которых по сигналу количества пусков в серии соединены с соответствующим выходом задатчика параметров объекта наблюдения, а выходы задатчика параметров объекта наблюдения, на которых формируются сигнал высоты радиолокационного центра отражения объекта наблюдения и сигналы размеров объекта наблюдения, соединены с соответствующими входами устройства обработки результатов испытаний, отличающийся тем, что дополнительно содержит устройство регистрации информации, блок задания режимов, введенный в состав устройства управления испытаниями, вычислитель коэффициентов перекрестных связей, введенный в состав имитатора БПЛА, а также вычислитель оценок бокового промаха и индикатор, введенные в состав устройства обработки результатов испытаний, в котором вычислитель оценок промаха является вычислителем оценок вертикального промаха, при этом выходы вычислителя коэффициентов перекрестных подключены к соответствующим входам устройства моделирования бокового движения и устройства моделирования продольного движения БПЛА, а его входы соединены с выходами устройства моделирования бокового движения БПЛА, на которых формируются сигналы углов скольжения и крена и с выходами устройства моделирования продольного движения, на которых формируются сигналы углов атаки и тангажа, сигналы скорости и высоты полета БПЛА и сигнал скорости изменения угла тангажа, входы устройства регистрации информации соединены с выходами сигналов углов закладки рулей направления, высоты и элеронов имитатора рулевых механизмов, а также с выходом сигнала бокового отклонения траектории БПЛА устройства моделирования бокового движения БПЛА и с выходом сигнала высоты полета БПЛА устройства моделирования продольного движения БПЛА, блок задания режимов содержит задатчик циклограммы и такта вычислительных операций, три блока согласования и таймер, первый вход которого подключен к выходу блока формирования серии пусков, второй вход соединен с выходом сигналов задания циклограммы задатчика циклограммы и такта вычислительных операций, а третий вход, соединенный со вторыми входами блоков согласования, подключен к выходу тактовых сигналов задатчика циклограммы и такта вычислительных операций, первый выход таймера через первый блок согласования соединен с управляющими входами устройств моделирования бокового и продольного движения БПЛА, вычислителя коэффициентов перекрестных связей и имитатора измерителя координат объекта наблюдения, ко второму, третьему и шестому выходам таймера подключены соответственно управляющие входы имитатора ветровых порывов, имитатора подстилающей поверхности и устройства выработки сигналов управления, четвертый выход таймера через второй блок согласования соединен с управляющими входами имитатора радиовысотомера, имитатора датчиков угловых скоростей, имитатора измерителей углов и имитатора измерителей линейных ускорений, а его пятый выход через третий блок согласования соединен с управляющим входом имитатора рулевых механизмов, кроме этого, вход устройства обработки результатов испытаний, на который поступает сигнал окончания пуска, является управляющим входом счетчика конечного кода, а вход по сигналу количества пусков в серии соединен со счетным входом счетчика конечного кода и с первыми входами вычислителей оценок бокового и вертикального промаха и вычислителя вероятности встречи, вторые входы которых подключены к выходу счетчика конечного кода, третьи входы вычислителя оценок бокового промаха и вычислителя вероятности встречи образуют вход устройства обработки результатов испытаний, на который поступает сигнал бокового отклонения траектории БПЛА, третий вход вычислителя оценок вертикального промаха и четвертый вход вычислителя вероятности встречи образуют вход устройства обработки результатов испытаний, на который поступает сигнал высоты полета БПЛА, четвертый вход вычислителя оценок вертикального промаха образует вход устройства обработки результатов испытаний, на который поступает сигнал высоты радиолокационного центра отражения объекта наблюдения, входы с пятого по восьмой вычислителя вероятности встречи образуют входы устройства обработки результатов испытаний, на которые поступают сигналы размеров объекта наблюдения, а выход вычислителя вероятности встречи и выходы вычислителей оценок бокового и вертикального промаха подключены к индикатору.
| КОМПЛЕКС БОРТОВОЙ АППАРАТУРЫ СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2290681C1 |
| УСТРОЙСТВО ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕГКОГО ЭКРАНОПЛАНА | 2002 |
|
RU2231104C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПАРАМЕТРОВ ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2374609C2 |
| RU 2008127176 A, 20.01.2010 | |||
| Устройство для определения параметров линейных динамических объектов | 1991 |
|
SU1837259A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| KR 100842105 B1, 30.06.2008 | |||
| CN 101848028 A, 29.09.2010. | |||

