Изобретение относится к бортовым системам автоматического управления летательными аппаратами с самолетной схемой с реализацией возможности режимов с разворотами в продольном канале с большими углами тангажа и координированных разворотов в боковом канале с большими углами крена.
Известны системы автоматического управления, в которых каналы управления креном и тангажом содержат элементы вычитания и суммирующие усилители, формирующие по задающим воздействиям и сигналам датчиков состояния управляющие воздействия на исполнительные приводы летательного аппарата [1].
Недостатком такой реализации является ограниченность возможностей управления в каждом из указанных каналов при разгруженности смежного.
Наиболее близким к предлагаемому изобретению является система управления беспилотным летательным аппаратом по крену и тангажу, содержащая последовательно соединенные задатчик угла тангажа, первый блок сравнения и первый суммирующий усилитель, последовательно соединенные задатчик угла крена, второй блок сравнения и второй суммирующий усилитель, последовательно соединенные первое исполнительное устройство и объект управления, первый, второй, третий и четвертый выходы которого соединены соответственно через датчик угловой скорости по тангажу, датчик угла тангажа, датчик угловой скорости по крену, датчик угла крена со вторыми входами соответственно первого суммирующего усилителя, первого блока сравнения, второго суммирующего усилителя и второго блока сравнения, выход второго исполнительного устройства соединен со вторым входом объекта управления [2].
Недостатком известной системы являются ограниченные функциональные возможности и невысокая точность управления.
Решаемой в предложенной системе управления технической задачей является расширение функциональных возможностей системы и повышение точности управления. Предложенным построением системы управления достигается функциональная возможность изменения интенсивности (уровня) управления в одном из каналов в условиях реальной разгрузки смежного канала.
Указанный технический результат достигается тем, что в известную систему управления беспилотным летательным аппаратом по крену и тангажу, содержащую последовательно соединенные задатчик угла тангажа, первый блок сравнения и первый суммирующий усилитель, последовательно соединенные задатчик угла крена, второй блок сравнения и второй суммирующий усилитель, последовательно соединенные первое исполнительное устройство и объект управления, первый, второй, третий и четвертый выходы которого соединены соответственно через датчик угловой скорости по тангажу, датчик угла тангажа, датчик угловой скорости по крену, датчик угла крена со вторыми входами соответственно первого суммирующего усилителя, первого блока сравнения, второго суммирующего усилителя и второго блока сравнения, а выход второго исполнительного устройства соединен со вторым входом объекта управления, дополнительно введены первый задатчик опорного сигнала, первый блок выделения сигнала положительной полярности, первый и второй блоки выделения модуля, второй блок выделения сигнала положительной полярности, элемент И, управляемый переключатель, первый ограничитель, второй ограничитель, первый сумматор, третий ограничитель, второй сумматор, четвертый ограничитель, первый и второй релейные элементы с зоной нечувствительности и второй задатчик опорного сигнала, выход которого через последовательно соединенные второй блок выделения сигнала положительной полярности, первый релейный элемент с зоной нечувствительности, элемент И, управляемый переключатель, первый ограничитель и первый сумматор соединен со входом первого исполнительного устройства, второй выход управляемого переключателя через второй ограничитель соединен со вторым входом первого сумматора, третий выход через последовательно соединенные третий ограничитель и второй сумматор - со входом второго исполнительного устройства, а четвертый выход через четвертый ограничитель соединен со вторым входом второго сумматора, второй и третий входы управляемого переключателя соединены с выходами первого суммирующего усилителя и второго суммирующего усилителя соответственно, выход задатчика угла тангажа через последовательно соединенные второй блок выделения модуля, первый блок выделения сигнала положительной полярности и второй релейный элемент с зоной нечувствительности подключен ко второму входу элемента И, выход первого задатчика опорного сигнала соединен со вторым входом первого блоке выделения сигнала положительной полярности, выход первого блока выделения модуля - со вторым входом второго блока выделения сигнала положительной полярности, а выход задатчика угла крена соединен со входом первого блока выделения модуля.
Действительно, при этом обеспечивается максимальная отработка системы управления по тангажу при ограниченных маневрах по крену, например, на конечных участках траектории полета и расширение зоны разворотов с большими углами крена при отсутствии глубоких разворотов по тангажу. В обоих случаях в смежных каналах сохраняется возможность ограниченного управления для поддержания стабилизации летательного аппарата и отработки возмущений, например, ветровых порывов и др.
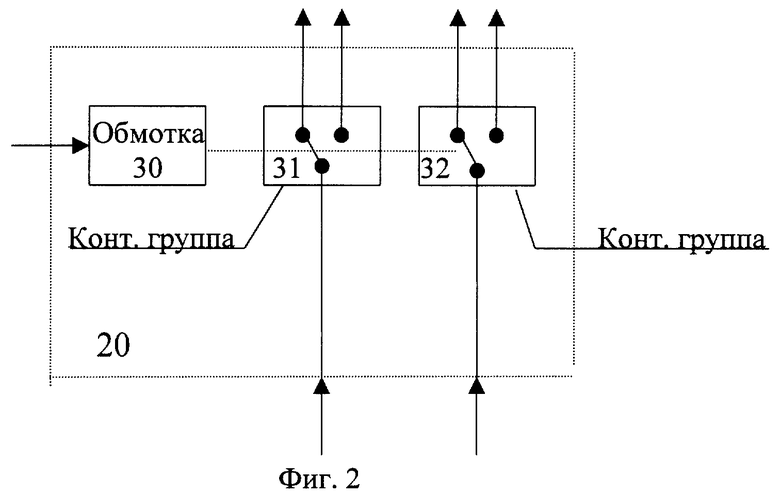
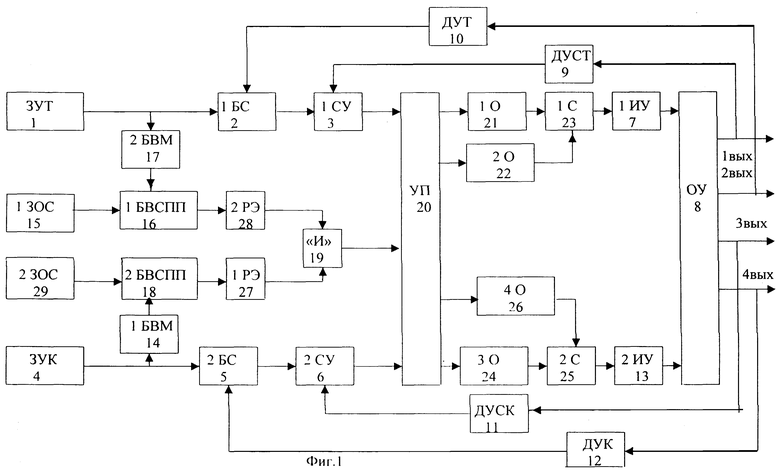
На фиг.1 представлена блок-схема системы управления, на фиг.2 - структурная схема управляемого переключателя.
Система управления беспилотным летательным аппаратом по крену и тангажу (фиг.1) содержит последовательно соединенные задатчик угла тангажа 1 (ЗУТ), первый блок сравнения 2 (1 БС) и первый суммирующий усилитель 3 (1 СУ), последовательно соединенные задатчик угла крена 4 (ЗУК), второй блок сравнения 5 (2 БС) и второй суммирующий усилитель 6 (2 СУ), последовательно соединенные первое исполнительное устройство 7 (1 ИУ) и объект управления 8 (ОУ), первый, второй, третий и четвертый выходы которого соединены соответственно через датчик угловой скорости по тангажу 9 (ДУСТ), датчик угла тангажа 10 (ДУТ), датчик угловой скорости по крену 11 (ДУСК), датчик угла крена 12 (ДУК) со вторыми входами соответственно первого суммирующего усилителя 3, первого блока сравнения 2, второго суммирующего усилителя 6 и второго блока сравнения 5, выход второго исполнительного устройства 13 (2 ИУ) соединен со вторым входом объекта управления 8, а выход задатчика угла крена 4 соединен со входом первого блока выделения модуля 14 (1 БВМ). Система содержит также первый задатчик опорного сигнала 15 (1 ЗОС), первый блок выделения сигнала положительной полярности 16 (1 БВСПП), второй блок выделения модуля 17 (2 БВМ), второй блок выделения сигнала положительной полярности 18 (2 БВСПП), элемент “И” - 19, управляемый переключатель 20 (УП), первый ограничитель 21 (1 О), второй ограничитель 22 (2 О), первый сумматор 23 (1 С), третий ограничитель 24 (3 О), второй сумматор 25 (2 С), четвертый ограничитель 26 (4 О), первый 27 (1 РЭ) и второй 28 (2 РЭ) релейные элементы с зоной нечувствительности и второй задатчик опорного сигнала 29 (2 ЗОС), выход которого через последовательно соединенные второй блок выделения сигнала положительной полярности 18, первый релейный элемент с зоной нечувствительности 27, элемент “И” 19, управляемый переключатель 20, первый ограничитель 21 и первый сумматор 23 соединен со входом первого исполнительного устройства 7, второй выход управляемого переключателя 20 через второй ограничитель 22 соединен со вторым входом первого сумматора 23, третий выход через последовательно соединенные третий ограничитель 24 и второй сумматор 25 - со входом второго исполнительного устройства 13, а четвертый выход через четвертый ограничитель 26 соединен со вторым входом второго сумматора 25, второй и третий входы управляемого переключателя 20 соединены с выходами первого суммирующего усилителя 3 и второго суммирующего усилителя 6 соответственно, выход задатчика угла тангажа 1 через последовательно соединенные второй блок выделения модуля 17, первый блок выделения сигнала положительной полярности 16 и второй релейный элемент с зоной нечувствительности 28 подключен ко второму входу элемента “И” 19, выход первого задатчика опорного сигнала 15 соединен со вторым входом первого блока выделения сигнала положительной полярности 16, выход первого блока выделения модуля 14 - со вторым входом второго блока выделения сигнала положительной полярности 18, а выход задатчика угла крена соединен со входом первого блока выделения модуля.
Управляемый переключатель 20 (фиг.2) может быть выполнен, например, в виде реле, которое включает в себя обмотку 30 и контактные группы 31 и 32.
Система управления работает следующим образом.
Основные сигналы управления в каналах тангажа и крена σ0в и σ0э, формируются, соответственно, блоками 1, 2, 3, 9, 10 канала тангажа и 4, 5, 6, 11, 12 канала крена




где К1ζ, К2ζ - передаточные коэффициенты первого суммирующего усилителя 3;
Δϑ - сигнал рассогласования по тангажу на выходе первого блока сравнения 2;
ϑд - сигнал датчика угла тангажа 10;
ϑзад. - задающий сигнал по тангажу на выходе задатчика угла тангажа 1;
ωzд - сигнал датчика угловой скорости по тангажу 9;
К1γ, К2γ - передаточные коэффициенты второго суммирующего усилителя 6;
Δγ - сигнал рассогласования по крену на выходе второго блока сравнения 5;
γд - сигнал датчика угла крена 12;
γзад. - задающий сигнал по крену на выходе задатчика угла крена 4;
ωхд - сигнал датчика угловой скорости по крену 11.
Сигналы ϑд, ωzд, γд, ωхд выдаются соответствующими датчиками состояния 10, 9, 12, 11, установленными на объекте управления 8.
В канале тангажа блоком 16 выделяется сигнал положительной полярности ϑ1-ϑоп, где сигнал ϑ1 формируется блоком 17,  а сигнал ϑоп, задается блоком 15.
а сигнал ϑоп, задается блоком 15.
Соответственно, в канале крена блоком 18 выделяется сигнал положительной полярности γоп-γ1, где сигнал γ1 формируется блоком 14,  а сигнал γоп задается блоком 29.
а сигнал γоп задается блоком 29.
На основе полученных в блоках 16 и 18 сигналов релейными элементами 28 и 27 формируются, соответственно, сигналы
- на выходе релейного элемента 28:

- на выходе релейного элемента 27:

Сигнал А3 на выходе блока 19 равен

Управляемый переключатель 20 осуществляет переключение цепей управления сигналов σ0в с σ’0в (на первом выходе) на σ”0в (на втором выходе) в канале тангажа и σ0э с σ’0э (на третьем выходе) на σ”0э, (на четвертом выходе) в канале крена.
А именно:
1) А3=0. Замкнута цепь управляемого переключателя 20 по ограничителю 21 в канале тангажа и ограничителю 24 в канале крена. Режим соответствует состоянию, при котором требуемое значение тангажа невелико т.е.  для любых значений γзад.: управление осуществляется с координацией и стабилизацией по крену и со стабилизацией по тангажу. Для этого режима уровень насыщения ограничителя 21 минимален, а уровень насыщения ограничителя 24 максимален;
для любых значений γзад.: управление осуществляется с координацией и стабилизацией по крену и со стабилизацией по тангажу. Для этого режима уровень насыщения ограничителя 21 минимален, а уровень насыщения ограничителя 24 максимален;
2) А3=1. Замкнута цепь управляемого переключателя 20 по ограничителю 22 в канале тангажа и ограничителю 26 в канале крена. Режим соответствует возможности глубоких разворотов по тангажу, т.е. в канале тангажа осуществляется управление, а в канале крена - стабилизация. Уровень насыщения ограничителя 22 максимален, а ограничителя 26 минимален.
Таким образом, в канале тангажа формируются сигналы управления
σ’0в, σ”0в - на первом и втором выходах управляемого переключателя 20;
σ1в - на выходе первого ограничителя 21;
σ2в- на выходе второго ограничителя 22;
σв - на выходе первого сумматора 23.
В канале крена формируются сигналы управления
σ’0э σ”0э - на третьем и четвертом выходах управляемого переключателя 20;
σ1э - на выходе третьего ограничителя 24;
σ2э - на выходе четвертого ограничителя 26;
σэ - на выходе второго сумматора 25.
На выходах первого 7 и второго 13 исполнительных устройств формируются отклонения δв, δэ, органов исполнительных устройств в канале тангажа (элевоны) и в канале крена (элероны), соответственно, которые отклоняют объект управления 8 по тангажу на угол ϑ с угловой скоростью ωz и по крену на угол γ с угловой скоростью ωх.
Все звенья управляющей части системы, в частности логические звенья, блоки выделения сигнала модуля, являются стандартными и могут быть реализованы на элементах автоматики и вычислительной техники.
Таким образом, предложенная система управления беспилотным летательным аппаратом по крену и тангажу позволяет расширить функциональные возможности системы и повысить точность управления.
Источники информации
1. И.А.Михалев и др. Системы автоматического управления самолетом. М.: Машиностроение, 1987г., с.174.
2. Патент РФ №1751716, кл. G 05 В 13/02, 30.07.92 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2005 |
|
RU2293366C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2006 |
|
RU2302030C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339990C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ ЗЕМЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814305C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ СИГНАЛОВ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2238582C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ДЛЯ РУЛЕВЫХ ПРИВОДОВ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2703007C1 |
Изобретение относится к бортовым системам автоматического управления летательными аппаратами с самолетной схемой с реализацией возможности режимов с разворотами в продольном канале с большими углами тангажа и координированных разворотов в боковом канале с большими углами крена. Техническим результатом изобретения является расширение функциональных возможностей за счет изменения интенсивности (уровня) управления в одном из каналов в условиях реальной разгрузки смежного канала и повышение точности системы. Система управления содержит объект управления, первое и второе исполнительные устройства, датчик угла тангажа, датчик угловой скорости по тангажу, датчик угла крена, датчик угловой скорости по крену, задатчики угла тангажа и крена, задатчики опорного сигнала каналов тангажа и крена, два блока сравнения, два блока выделения сигнала положительной полярности, два суммирующих усилителя, два блока выделения модуля, два релейных элемента с зоной нечувствительности, элемент И, управляемый переключатель, четыре ограничителя, два сумматора. 2 ил.
Система управления беспилотным летательным аппаратом по крену и тангажу, содержащая последовательно соединенные задатчик угла тангажа, первый блок сравнения и первый суммирующий усилитель, последовательно соединенные задатчик угла крена, второй блок сравнения и второй суммирующий усилитель, последовательно соединенные первое исполнительное устройство и объект управления, первый, второй, третий и четвертый выходы которого соединены соответственно через датчик угловой скорости по тангажу, датчик угла тангажа, датчик угловой скорости по крену, датчик угла крена со вторыми входами соответственно первого суммирующего усилителя, первого блока сравнения, второго суммирующего усилителя и второго блока сравнения, а выход второго исполнительного устройства соединен со вторым входом объекта управления, отличающаяся тем, что она содержит первый задатчик опорного сигнала, первый блок выделения сигнала положительной полярности, первый и второй блоки выделения модуля, второй блок выделения сигнала положительной полярности, элемент И, управляемый переключатель, первый ограничитель, второй ограничитель, первый сумматор, третий ограничитель, второй сумматор, четвертый ограничитель, первый и второй релейные элементы с зоной нечувствительности и второй задатчик опорного сигнала, выход которого через последовательно соединенные второй блок выделения сигнала положительной полярности, первый релейный элемент с зоной нечувствительности, элемент И, управляемый переключатель, первый ограничитель и первый сумматор соединен со входом первого исполнительного устройства, второй выход управляемого переключателя через второй ограничитель соединен со вторым входом первого сумматора, третий выход через последовательно соединенные третий ограничитель и второй сумматор - со входом второго исполнительного устройства, а четвертый выход через четвертый ограничитель соединен со вторым входом второго сумматора, второй и третий входы управляемого переключателя соединены с выходами первого суммирующего усилителя и второго суммирующего усилителя соответственно, выход задатчика угла тангажа через последовательно соединенные второй блок выделения модуля, первый блок выделения сигнала положительной полярности и второй релейный элемент с зоной нечувствительности подключен ко второму входу элемента И, выход первого задатчика опорного сигнала соединен со вторым входом первого блока выделения сигнала положительной полярности, выход первого блока выделения модуля - со вторым входом второго блока выделения сигнала положительной полярности, а выход задатчика угла крена соединен со входом первого блока выделения модуля.
| Устройство координированного регулирования углового бокового движения летательного аппарата | 1990 |
|
SU1751716A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| US 5031102 А, 09.07.1991 | |||
| МИХАЛЕВ И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.174. | |||

