Изобретение относится к области борьбы с терроризмом с применением самолетов.
Известно, что многие страны мира, в том числе Германия, разрешают сбивать в воздухе захваченные террористами самолеты (Сайт Интернет http://www.7nevs.ru/). При этом полностью погибает весь экипаж и все пассажиры самолета.
Известна система безопасности самолета по пат. РФ №2151714, содержащая систему управления и «черный ящик», система управления содержит технические средства, не допускающие превышение критических режимов полета: скорости, углов.
Недостаток - система не имеет защиты от террористов.
Известен способ обороны объекта от террористов и система для обороны объекта, в том числе самолета, по патенту DE №3736744.
Система содержит стрелковое оружие с установленной на нем видеокамерой, приводы управления оружием и устройство управления с дисплеем, подключенное к приводам. Способ заключается в обнаружении террориста при помощи видеокамеры и уничтожении террориста при помощи единицы дистанционно управляемого стрелкового оружия.
Наличие стрелкового оружия на борту самолета может привести к его несанкционированному использованию.
Известны способ и система предотвращения захвата самолета по заявке РФ на изобретение №2004102140, МПК 7 G08В 19/00, опубл. 10.07.2005 г. (прототип). Этот способ заключается в обнаружении террористов при помощи видеокамеры, установленной на самолете, и их уничтожения путем стрельбы через обшивку из ручного огнестрельного оружия с применением для определения места нахождения террориста персонального компьютера типа «ноутбук». Прицеливание при помощи компьютера типа «ноутбук» ведется только в одной плоскости, определение соответствия координат внутри самолета и снаружи не продумано, погрешность стрельбы по этому способу более 1 м, что приведет к поражению пассажиров.
Устройство содержит видеокамеру, компьютер, передатчик самолета с антенной, компьютер типа «ноутбук» и ручное огнестрельное оружие.
Применение для уничтожения террористов видеосигнала их реального изображения в режиме реального времени недостаточно.
Необходимы точные координаты местонахождения террориста, причем не обязательно наличие глобальной системы координат: широты и долготы, достаточно иметь точное местоположение цели в локальной системе координат.
Для точного определения координат объектов обычно применяются радиолокаторы. Но наличие одного радиолокатора не позволит решить поставленной задачи, в связи с тем, что радиолокация объекта внутри самолета и его идентификация невозможна.
Задача создания изобретения - повышение точности поражения террористов и предотвращение несанкционированного применения оружия, а также уменьшение потерь пассажиров.
Термин локация (и его всевозможные производные) произошел от латинского слова locatio - размещение, распределение, и означает определение местоположения объекта по сигналам (звуковым, тепловым, оптическим, электромагнитным волнам и др.), излучаемым самим объектом (пассивная локация) и отраженным от него сигналом, излучаемым самим устройством (активная локация). Свойствами локации (способностью определять положение количественного объекта по отношению к себе или свое положение в пространстве) обладают многие животные и человек - это так называемая биолокация. В зависимости от применяемых методов и технических средств различаются: звуковая локация (гидро, звуко, эхо), радиолокация (электромагнитная) и, позднее появившиеся, оптическая (лазерная) локация, планетная (радиолокационная астрономия) и загоризонтная (ионосферная) радиолокации. Первоначально, в годы 1-й мировой войны появились гидролокаторы (приборы, которые могут обнаруживать самолет по звуку двигателей) - так называемые звукоулавливатели. Над созданием звукоулавливателей, которые вошли в состав приборов управления артилллерийским зенитным огнем (ПУАЗО), в СССР работали Центральная радиолаборатория (ЦРЛ), Всесоюзный электротехнический институт (ВЭИ), Военная артиллерийская академия (ВАУ) им. Ф.Э.Дзержинского и Научно-исследовательская лаборатория артиллерийского приборостроения Главного артиллерийского управления (НИЛАП ГАУ). Образцы первых звукоулавливателей испытывались на подмосковном полигоне в 1929-1930 годах. В 1931 г. были созданы опытные образцы системы крупногабаритного звукоулавливателя и полутораметровый электрический прожектор. Предпосылками работ по созданию и дальнейшему развитию радиолокации послужили несколько исторических фактов: открытие явления отражения радиоволн, впервые наблюдали Г.Герц. Попов С., во время опытов по радиосвязи на Балтийском море зарегистрировал влияние корабля, пересекающего трассу радиоволн, на силу этого сигнала. Немецкий ученый-изобретатель Кристиан Хюльсмэйер в 1904 г. в своей заявке на изобретение сформулировал идею обнаружения корабля по отраженным от него радиоволнам. Заявка содержала также подробное описание устройства для ее реализации. Позднее им был получен второй патент на усовершенствование этого устройства. В 1914 г. росиянин И.И.Ренгартен проводил работы по макетированию радиопеленгатора. В 1916 г. французами П.Ланжевеном и К.Шиловским был создан ультразвуковой гидролокатор. В сентябре 1922 года два экспериментатора, служившие в ВМФ США, - Хойт Э.Тейлор и Лео К.Янг проводили опыты по радиосвязи на декаметровых волнах (3-30 МГц) через реку Потомак. В это время по реке прошел корабль, и связь прервалась, что натолкнуло их на мысль о применении радиоволн для обнаружения движущихся объектов. В 1921 г. американец А.У.Хэлл изобрел магнетрон, что дало возможность последующего развития радиолокационных станций (РЛС) на СВЧ. В 1924 г. английский ученый Э.Эплтон провел на декаметровых волнах измерения высоты слоя Кеннелли-Хевисайда (слой "Е" ионосферы, от которого отражаются радиосигналы). В 1925 г. английские ученые Г.Брейт и М.Тьюков опубликовали результаты работ по определению высоты слоя Кеннелли-Хевисайда измерением времени запаздывания импульсного сигнала, отраженного от слоя, относительно сигнала, пришедшего вдоль поверхности Земли. В июне 1930 г. моряк ВМФ США Лоренс Э.Хайленд, проводя эксперименты по определению направления с помощью декаметровых волн, обнаружил, что когда над передающей антенной пролетает самолет, поле радиосигнала сильно искажается, и в результате чего, Хайленд предложил использовать декаметровые волны для предупреждения о приближении вражеских самолетов. В январе 1931 г. Авиационная радиолаборатория ВМС в Вашингтоне приступила к выполнению проекта, имевшего целью обнаружение вражеских судов и самолетов с помощью радио. В начале 1931 г. проводились, к сожалению неудачные, опыты по установлению связи между городами - английским Дувром и французским Кале при помощи волн длиною 18 см. В 1932-1933 годах английское морское ведомство стало применять приборы АСДИК, регистрирующие ультразвуки высокой частоты, создаваемые шумом винтов подводных лодок. В 1932 г. большой объем работ по изучению интерференции при отражении радиоволн от самолета выполнили американские инженеры Б.Тревор и П.Картер. В 1934 г. сотрудник Морской исследовательской лаборатории США Роберт Пейдж первым зарегистрировал (сфотографировал) отраженный от самолета сигнал на частоте 60 МГц. В 1935 г. работы по импульсной радиолокации проводил Р.Ватсон-Ватт, Великобритания. Изготовленная им аппаратура получила отраженный сигнал от самолета на расстоянии 15 км. В 1935 г. радиолокация получила первое коммерческое применение: во Франции фирма "Societe Francaise Radioelectrique" установила на лайнере "Нормандия" так называемый "Детектор препятствий", а в 1936 г. в порту Гавра был установлен так называемый "Радиопрожектор" для обнаружения судов, входящих в гавань и покидающих ее. В 1936 г. американцами Р.Колвеллом и А.Френдом были зафиксированы отражения радиоимпульсов от турбулентных и инверсионных слоев в тропосфере. В 1936 г. макет американской РЛС, работавший на частоте 80 МГц, обнаружил самолет на расстоянии 65 км (в 1937 г. у немцев была достигнута дальность 35 км). Второго июля 1936 г. в США была изготовлена первая небольшая РЛС, работавшая на частоте 200 МГц, которая в апреле следующего года была установлена на борту эсминца "Лири". РЛС получили название РАДАР (сокращенное обозначение от "Radio Detection And Ranging", т.е. "Прибор для радиопеленгации и измерения". На базе данной РЛС в 1938 г. была разработана модель XAF, прошедшая широкие бортовые испытания в 1939 г. (прототип модели 1940 г. - СХАМ, которая была установлена на 19 военных кораблях). Первые пять импульсных РЛС (работали на метровых волнах) для обнаружения самолетов были установлены на юго-западном побережье Великобритании в 1936 г. Первые работы по радиолокационному обнаружению самолетов в СССР были начаты в 1933 г. по инициативе М.М.Лобанова. С 1934 г. данные работы возглавили Ю.К.Коровин, П.К.Ощепков (Ленинградский электрофизический институт) и Б.К.Шембель. Первая серийная РЛС (РУС-1) появилась в 1938 г. в КБ, которым руководил Д.С.Стогов. РУС-1 были применены во время финской военной кампании 1939-1940 гг. В 1937 г. в Лениградском ФТИ под руководством Ю.Б.Кобзарева был разработан импульсный метод радиолокации. В 1940 г. было начато серийное производство первой импульсной радиолокационной станции дальнего обнаружения самолетов РУС-2 ("Редут"), разработкой которой с 1935 г. занимались П.А.Погорелко и Н.Я.Чернецов. Во время ВОВ было развернуто производство портативных РЛС "Пегматит". 4 июля 1943 г. вышло Постановление Государственного Комитета Обороны (ГКО) об учреждении при нем Совета по радиолокации. Практическое руководство повседневной деятельностью Совета осуществлял Аксель Иванович Берг (впоследствии академик), а отвественным секретарем Совета был Александр Александрович Турчанин. В 1943 г. по инициативе Совета по радиолокации был создан Институт локационной техники, который возглавил П.З.Стась. Главным инженером стал профессор А.М.Кугушев. В июне 1947 г. Совет по радиолокации был преобразован в Комитет по радиолокации при СНК СССР, и его председателем стал М.З.Сабуров. Загоризонтная радиолокация базируется на открытии в 1947 г. советским ученьм Н.И.Кабановым явления дальнего рассеянного отражения от Земли декаметровых волн с их возвратом после отражения от ионосферы к источнику излучения. Неоценимый вклад в создание и разработку советской радиолокационной техники также внесли В.Д.Калмыков и А.И.Шокин, который в течении ряда лет был министром электронной промышленности СССР. После окончания Второй мировой войны начался этап активной разработки планетной радиолокации, и первыми ее объектами стали Луна и метеоры. Первые эхо-сигналы от солнечной короны были получены в 1959 г. (США), а от Венеры - в 1961 г. (Великобритания, СССР и США). В СССР радиолокацию Венеры, Меркурия, Марса и Юпитера выполнил в 1961-1963 гг. коллектив ученых во главе с В.А.Котельниковым. Большой вклад в развитие отечественной оптической локации внесли ученые Н.Г.Басов, Ф.М.Прохоров, А.Л.Микаэлян и др.
Задача создания изобретения - повышение эффективности уничтожения террористов и предотвращение несанкционированного использования оружия.
Решение указанных задач достигнуто в способе предотвращения захвата самолета путем обнаружения террриста и его уничтожения при помощи стрелкового оружия, наведение которого на цель осуществляют по экрану монитора компьютера управления, отличающемся тем, что наведение на терориста стрелкового оружия осуществляют посредством вычисления трех координат расположения террориста и дистанционно-управляемого стрелкового оружия, потом производят расчет углов установки дистанционно-управляемого стрелкового оружия, разворачивают дистанционно-управляемого стрелковое оружие по вычисленным углам и производят стрельбу из него. Обнаружение террориста осуществляют при помощи, по крайней мере, одной управляемой видеокамеры, оборудованной приводами горизонтального и вертикального поворота видеокамеры, установленной в салоне самолета и подключенной через бортовой компьютер к передатчику самолета, уничтожение террориста осуществляют путем стрельбы по нему из дистанционно-управляемого стрелкового оружия через обшивку самолета с применением управляющего компьютера, вычисление координат самолета осуществляют с использование данных полученных с двух радиомаяков, подключенных к передатчику самолета, координаты террориста внутри самолета определяют при помощи управляемой видеокамеры, оборудованой датчиками горизонтального и вертикального углов поворота управляемой видеокамеры и лазерным дальномером, стрельбу ведут с использованием наземной установки, имеющей дистанционно-управляемое стрелковое оружие, с приводами горизонтального и вертикального поворота оружия и датчиками углов горизонтального и вертикального поворота оружия, и радиопеленгатора, оборудованного приводами горизонтального и вертикального поворота, и датчиками угла вертикального и горизонтального поворота радиолокатора, и лазерным дальномером для определения направления стрельбы.
Решение указанной задачи достигается в системе предотвращения захвата самолета, содержащей, по меньшей мере, одну управляемую видеокамеру с приводами горизонтального и вертикального поворота, установленную в салоне самолета и подключенную через бортовой компьютер к передатчику самолета, и стрелковое оружие, отличающаяся тем, что в ее состав входит наземная установка, на которой установлено дистанционно управляемое стрелковое оружие с приводами горизонтального и вертикального поворота, датчиками углов горизонтального и вертикального поворота, наземное оборудование содержит радиопеленгатор, оборудованный приводами горизонтального и вертикального поворота, и датчиками углов горизонтального и вертикального поворота радиолокатора, и лазерным дальномером, дистанционно-управляемое стрелковое оружие, радиолокатор и приемно-передающее устройство наземной установки подключены к компьютеру управления, который оборудован монитором и устройством управления, каждая управляемая видеокамера оборудована датчиками горизонтального и вертикального поворота видеокамеры и лазерным дальномером, на обшивке самолета установлены два радиомаяка, подключенные к передатчику самолета. Управляемая видеокамера оборудована трансфокатором. Каждая управляемая видеокамера оборудована лазерным целеуказателем. Функции дальномера и лазерного целеуказателя совмещены.
Проведенные исследования показали, что предложенное техническое решение обладает новизной, изобретательским уровнем и промышленной применимостью.
Новизна подтверждается патентными исследованиями, промышленная применимость - тем, что отдельные компоненты изобретения известны из уровня техники, а изобретательский уровень тем, что совокупность признаков позволила при их совместном применении получить новое свойство: очень высокую точность прицеливания и 100% поражение цели.
Сущность изобретения поясняется на фиг.1-5, где
на фиг.1 приведена принципиальная схема реализации способа в плане,
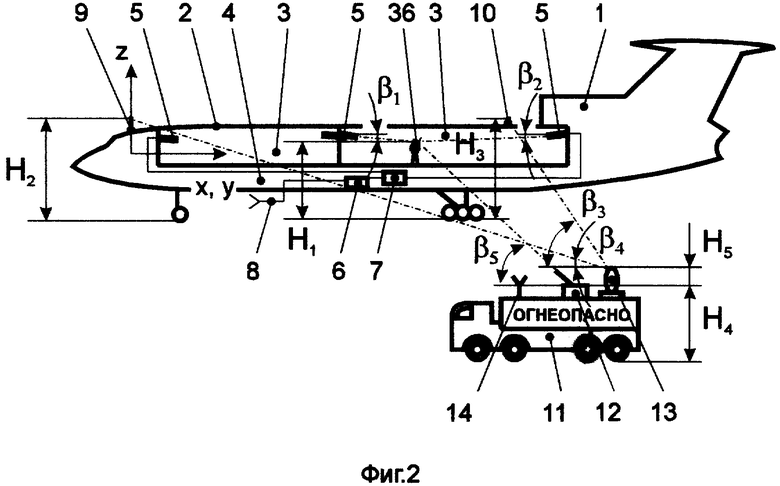
на фиг.2 приведена схема реализации способа в проекции сбоку,
на фиг.3 приведена наземная установка,
на фиг.4 - схема подключения управляемой видеокамеры к бортовому компьютеру,
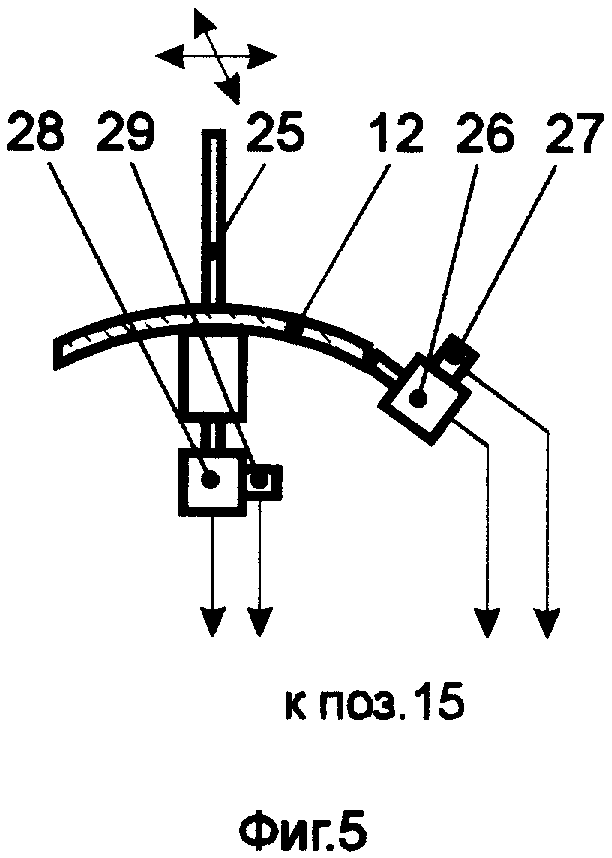
на фиг.5 приведена схема подключения дистанционно-управляемого стрелкового оружия,
на фиг.6 приведена схема подключения радиолокатора к управляющему компьютеру.
Самолет 1, имеющий обшивку 2, содержит пассажирские салоны 3 (или один салон) и грузовой отсек 4. На перегородке, которой разделены пассажирские салоны 3, установлены одна или несколько управляемых видеокамер 5. Оборудование самолета содержит передатчик самолета 6, подключенный к бортовому компьютеру 7. К передатчику самолета 6 подключена антенна самолета 8. На обшивке самолета 2 установлены два радиомаяка 9 и 10, подключенные к передатчику 6.
Одним из основных элементов системы безопасности является наземная установка 11, замаскированная под спец. технику, используемую на аэродроме, например топливозаправщик. На наземной установке 11 установлены, по меньшей мере, одна единица дистанционно управляемого стрелкового оружия 12. Число единиц дистанционно управляемого стрелкового оружия 12, их калибр и боекомплект может быть любым. Может быть применена одна или несколько единиц дистанционно управляемого стрелкового оружия 12, наиболее целесообразно применение пулеметов. На наземной установке 11 смонтирован радиолокатор 13 и приемная антенна 14 для приема видеосигнала с управляемой видеокамеры 5 (или управляемых видеокамер). Внутри наземной установки 11 установлен управляющий компьютер 15 (конкретно, системный блок 15, к которому подключен монитор 16 и устройство управления, например манипулятор типа «мышь» 17 (фиг.3). К управляющему компьютеру 15 подключены все единицы дистанционно управляемого стрелкового оружия 12, радиолокатор 13 и приемная антенна 14. Источник энергопитания и схема энергопитания на фиг.1-6 не показаны.
Управляемая видеокамера 5 (фиг.4) установлена на шарнире 18 и оборудована приводом горизонтального поворота 19 и датчиком угла горизонтального поворота 20, приводом вертикального поворота 21 и датчиком угла вертикального поворота 22, дальномером 23, например лазерным, и лазерным целеуказателем 24. Дальномер 23 и лазерный целеуказатель 24 могут быть оформлены конструктивно как один прибор, т.е. их функции совмещены. Приводы 19 и 21, датчики углов 20 и 22, дальномер 23 и лазерный целеуказатель 24 подключены к бортовому компьютеру 7. В качестве бортового компьютера 7 может использоваться персональный компьютер типа «Пентиум». Операционная система WIDOWS-95, -98, -2000, -ME, -XP или LUNIX. Программное обеспечение разработано в соответствии с приведенным ниже алгоритмом.
Дистанционно управляемое стрелковое оружие 12 (Фиг.5) содержит ствол 25, привод горизонтального поворота оружия 26, датчик угла горизонтального поворота оружия 27, привод вертикального поворота оружия 28, датчик угла вертикального поворота оружия 29. Привода оружия 26, 28 и датчики 27, 29 подключены к управляющему компьютеру 15.
Радиолокатор 13 содержит направленную антенну 30, электронный блок 31, привод горизонтального поворота направленной антенны 32 с датчиком угла горизонтального поворота направленной антенны 33, привод вертикального поворота направленной антенны 34 и датчик вертикального поворота направленной антенны 35. Приводы горизонтального и вертикального поворота направленной антенны 32 и 34, датчики углов поворота направленной антенны 33 и 35 и электронный блок 31 соединены с управляющим компьютером 15. Терроорист 36 (фиг.1 и 2) находится в салоне самолета 3.
Алгоритм вычисления исходных данных для стрельбы.
Для точной стрельбы по террористу необходимо:
а) навести ствол 25 дистанционно-управляемого стрелкового оружия 12 на цель. Для этого необходимо рассчитать углы α5 и β5 установки ствола.
b) вычислить расстояние от дистанционно управляемого оружия точки 12 до точки наведения 36, места смертельного поражения террориста, например голова.
Принято различать глобальную и локальную системы координат. Локальная система координат может быть привязана к любому объекту.
Наиболее точное прицеливание обеспечивает система координат, связанная с самолетом 1. За нулевую точку системы координат принят радиомаяк 9, за ось «Х-Х» - направление на радиомаяк 10. Ось «У-У» выполнена перпендикулятро оси «Х-Х». Точка прицеливания - коррдинаты террориста 36.
Линейные размеры L1 и L5 для всех типов самолетов внесены в базу данных управляющего компьютера 15. Радиолокатор 13 определяет расстояние до радиозондов 9 и 10, управляющий компьютер 15 вычисляет угловое положение самолета 1 в плане, т.е. углы α2 и α3 и угловое положение наземной установки 11 в плане α6 Используя данные, полученные с управляемой видеокамеры 5, оборудованной дальномером (или с нескольких управляемых видеокамер 5) определяют угол α1 и вычисляют расстояние L2 от управляемой видеокамеры 5 до террориста 36 (точки прицеливания).
По приведенной далее формуле рассчитывают расстояние от нулевой точки 9 до точки прицеливания 36

По данным радиолокации определяются коррдинаты в плане оси поворота дистанционно управляемого стрелкового оружия 12 и угол α5 (фиг.1) для его точного наведения на цель по формуле

Расчеты в вертикальной плоскости (Фиг.2) по оси Z производятся аналогично.
Паспортные данные конкретных самолетов, занесенные в базу данных:
H1 - высота установки управляемой видеокамеры 5 (управляемых видеокамер),
H2 - высота расположения радиомаяка 9,
Н3 - высота расположения радиомаяка 10.
Паспортные данные конкретной наземной установки 11 (в операции может участвовать несколько наземных установок):
Н4 - высота установки дистанционно управляемого стрелкового оружия 12,
Н5 - высота установки радиолокатора 13.
Все эти данные занесены в базу данных управляющего компьютера 15.
Расчеты угла установки дистанционно-управляемого оружия 12 в вертикальной плоскости β5 производят, используя данные радиолокации и данные дальномера, полученные с управляемой видеокамеры 5 (или нескольких управляемых видеокамер).
Линейные измерения и расчеты могут быть выполнены с точность до 1 мм, т.е. точность стрельбы и вероятность поражения цели практически составляет 100% при нахождении наземной установки в пределах аэропорта.
Уничтожение террориста производится в следующей последовательности. При получении тревожного сигнала, переданного при помощи передатчика, самолета 6 наземная установка 11, замаскированная под спецтехнику, используемую на аэродроме, подъезжает на максимально близкое расстояние к захваченному самолету 1. На самолете включают управляемую видеокамеру 5 (или несколько управляемых видеокамер 5) и два радиозонда 9 и 10. Приемная антенна 14 принимает видеосигнал с управляемых видеокамер 5, а радиолокатор 13 по сигналам с радиозондов 9 и 10 определяет расстояние до них и устанавливает систему координат по месту нахождения радиозонда 9. Управляющий компьютер 15 производит расчеты по приведенному выше алгоритму. В конечном итоге вычисляются углы α5 и β5 установки ствола 25 и расстояние от точки наведения - поз.12 - до цели - поз.37. Приводы оружия 26 и 28 автоматически устанавливают ствол 25 дистанционно управляемого стрелкового оружия 12 в требуемом угловом положении как в горизонтальной, так и в вертикальной плоскостях. Датчики углового положения оружия 33 и 35 контролируют и управляют автоматическим наведением дистанционно управляемого стрелкового оружия 12 на цель. Управляющий компьютер 15, учитывая фактическую дальность стрельбы, делает коррекцию угла β5. Оператор, используя устройство управления 17 и изображение террориста 36, полученное на экране монитора 16, производит выстрел по террористу 36. При этом осуществляется визуальный контроль поражения цели по видеоизображению, переданному управляемой видеокамерой 5. Используя результаты обработки компьютером данные по нескольким целям, можно очень быстро поразить все цели даже при наличии только одной единицы дистанционно управляемого стрелкового оружия.
Применение изобретения позволило:
1. Обеспечить гарантированное поражение цели.
2. Уменьшить потери пассажиров.
3. Предотвратить несанкционированное использование оружия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕЗОПАСНОСТИ САМОЛЕТА | 2004 |
|
RU2302661C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ЗАХВАТА САМОЛЕТА ИЛИ ТЕРРОРИСТИЧЕСКОГО АКТА НА НЕМ И СИСТЕМА БЕЗОПАСНОСТИ САМОЛЕТА | 2004 |
|
RU2269817C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ОХРАНОЙ И ОБОРОНОЙ | 2004 |
|
RU2270973C2 |
| СИСТЕМА ОРГАНИЗАЦИИ ОХОТЫ | 2004 |
|
RU2282815C1 |
| БОЕВОЙ КОМПЛЕКС БЫСТРОГО РЕАГИРОВАНИЯ | 2007 |
|
RU2343395C1 |
| ШТУРМОВОЙ КОМПЛЕКС | 2007 |
|
RU2338995C1 |
| БОЕВОЙ УДАРНЫЙ КОМПЛЕКС | 2007 |
|
RU2345314C1 |
| БОЕВОЙ КОМПЛЕКС | 2007 |
|
RU2341759C1 |
| БОЕВОЙ КОМПЛЕКС | 2007 |
|
RU2340859C1 |
| БОЕВАЯ СИСТЕМА | 2007 |
|
RU2345313C1 |



Изобретение относится к области средств безопасности авиационных пассажирских и грузопассажирских самолетов. Технический результат заключается в более точном наведении оружия на террористов. Захват стоящего на земле самолета предотвращают путем обнаружения террориста и его уничтожения при помощи стрелкового оружия. Наведение стрелкового оружия на террориста осуществляют посредством вычисления координат расположения террориста и дистанционно-управляемого стрелкового оружия и расчета установки стрелкового оружия. Обнаружение террориста осуществляют при помощи, по крайней мере, одной управляемой видеокамеры, установленной в салоне самолета и подключенной через бортовой компьютер к передатчику самолета. Уничтожение террориста осуществляют путем стрельбы по нему из дистанционно-управляемого стрелкового оружия через обшивку самолета с применением управляющего компьютера. 2 н. и 3 з.п. ф-лы, 6 ил.
| RU 2004102140 А, 10.07.2005 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ЦЕЛЬ | 2003 |
|
RU2239766C1 |
| DE 3736744 A1, 11.05.1989 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

