Изобретение относится к электротехнике и может быть использовано в системах регулирования угловой скорости, в частности электроприводов, построенных на базе принципов фазовой синхронизации.
Известен ряд электроприводов [1], построенных на базе цифровых измерителей скорости, основным элементом которых являются фотоимпульсные датчики [2, 3]. В большинстве цифровых измерителей скорости ее величина определяется путем подсчета количества импульсов датчика за фиксированный промежуток времени или путем измерения длительности одного или нескольких периодов сигнала фотоимпульсного датчика [1, 3]. Первый способ построения цифровых измерителей скорости характеризуется низкой погрешностью ее измерения в области больших значений угловой скорости. При втором способе с повышением величины измеряемой скорости точность ее измерения падает. В зоне низких и инфранизких угловых скоростей даже при использовании измерительных преобразователей с высокой разрешающей способностью период квантования их выходного сигнала достигает столь больших значений, что обеспечение малой погрешности стабилизации регулируемых координат путем подсчета количества импульсов или измерения периода сигнала датчика становится практически невозможной. Поэтому в прецизионных системах электропривода используются системы, замкнутые не по угловой скорости вала, а по отклонению его положения от задаваемого значения. Как показано в [6] такой принцип построения системы управления обеспечивает идеальный астатизм по среднему значению измеряемой угловой скорости, следовательно, малую погрешность ее стабилизации. Технически этот принцип реализуется за счет выявления фазового рассогласования частотных сигналов задания и обратной связи, поступающего с датчика положения с импульсным выходным сигналом. Все преимущества систем с фазовой синхронизацией могут быть в полной степени обеспечены только при высокой частоте входных сигналов. Наиболее близким к предлагаемому устройству является электропривод постоянного тока [4]. Электропривод содержит двигатель, с валом которого связан измеритель скорости. Якорная обмотка двигателя включена к выходам силового преобразователя. Эти выходы включены в диагональ моста силового преобразователя, выполненного на транзисторах. Модулирующий и реверсирующий входы силового преобразователя соединены с первым и вторым выходами частотно-фазового дискриминатора. К первому входу частотно-фазового дискриминатора через первый делитель частоты подключен генератор задающей частоты. Частотно-фазовый дискриминатор содержит четыре триггера, первый и второй элементы "ИЛИ", первый и второй элементы "И". Счетные входы первого и второго триггеров подключены к первому входу частотно-фазового дискриминатора, второй вход которого связан со счетными входами третьего и четвертого триггеров. Информационные входы первого и третьего триггеров связаны с выходами соответствующих элементов "ИЛИ". Входы сброса триггеров соединены с выходом первого элемента "И", второй вход которого связан с выходом третьего триггера, информационным входом второго триггера и вторым входом первого элемента "ИЛИ". Первый вход последнего соединен с первым выходом частотно-фазового дискриминатора, выходом второго триггера и первым входом второго элемента "И". Второй вход второго элемента "И" связан со вторым выходом частотно-фазового дискриминатора, выходом четвертого триггера и вторым входом элемента "ИЛИ", первый вход которого соединен с первым входом первого элемента "И", выходом первого триггера и информационным входом четвертого триггера. Входы сброса второго и четвертого триггеров подключены к выходу второго элемента "И".
Измеритель скорости содержит фотоимпульсный датчик скорости, второй и третий делители частоты, четыре триггера и мультиплексор. Выход мультиплексора через второй делитель частоты соединен со вторым входом частотно-фазового дискриминатора. Первый адресный вход мультиплексора подключен к входу сброса второго триггера измерителя скорости и выходу четвертого триггера. Второй адресный вход мультиплексора соединен с выходом первого триггера измерителя скорости, информационный и счетный входы которого соединены с первым и вторым выходами фотоимпульсного датчика скорости. Информационный вход четвертого триггера соединен с выходом второго триггера. Его счетный вход связан со вторым выходом фотоимпульсного датчика скорости. Счетный вход четвертого триггера, второй и четвертый информационные входы мультиплексора соединены с выходом третьего триггера. Вход третьего триггера подключен к выходу третьего делителя частоты и входу управления мультиплексора. На первый информационный вход мультиплексора подан сигнал логического нуля, а на третий - логической единицы. К генератору задающей частоты подключен вход третьего делителя частоты.
Такой электропривод обеспечивает широкий диапазон регулирования угловой скорости и малую погрешность ее стабилизации. Погрешность стабилизации управляемых координат определяется возможностями используемого фотоимпульсного датчика положения, а именно его разрешающей способностью. Однако ее может быть недостаточно для получения высоких качественных показателей работы электропривода. Кроме того, в известном устройстве возможен пропуск одного или нескольких фронтов входного сигнала при их следовании с интервалом, меньшим периода выходного сигнала третьего делителя 27 частоты. Также возможно появление ложных импульсов при наличии синфазных помех, возникающих в моменты изменения одного из выходных сигналов фотоимпульсного датчика скорости.
Технический результат предлагаемого изобретения заключается в увеличения помехоустойчивости канала измерения управляемой координаты. Для достижения поставленной цели в предлагаемом устройстве для преобразования сигнала фотоимпульсного датчика скорости/положения вала используются шесть триггеров, два элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ" и четыре мультиплексора. Применение этих элементов обеспечивает увеличение помехозащищенности устройства, особенно при протяженных линиях связи между двигателем, на валу которого установлен фотоимпульсный датчик скорости/положения, и устройством управления.
Для этого в известное устройство введены средства, обеспечивающие защиту от пропуска моментов изменения выходных сигналов датчика и синфазных помех, возникающих в линиях связи.
Для реализации предлагаемых возможностей в известное устройство введены шесть триггеров (Т5-Т10), два элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ" и четыре мультиплексора. Триггера Т5-Т7 и Т8-Т10 включены по схеме сдвигающих регистров с возможностью установки в определяемое условиями работы устройства состояние. Для этого между выходом и информационным входом пары триггеров (Т5-Т6), (Т6-Т7), (Т8-Т9) и (Т9-Т10) включены элементы "ИСКЛЮЧАЮЩЕЕ ИЛИ". Первые входы первого и второго элементов "ИСКЛЮЧАЮЩЕЕ ИЛИ" соединены с выходом триггера Т8 и счетным входом первого триггера. Первые входы третьего и четвертого элементов "ИСКЛЮЧАЮЩЕЕ ИЛИ" соединены с выходом триггера Т10 и информационным входом первого триггера. Информационные входы триггеров Т6 и Т8 подключены к первому и второму выходам фотоимпульсного датчика скорости. Счетные триггеров (Т5-Т10) через четвертый делитель подключаются к выходу генератора задающей частоты. Кроме того, по сравнению с прототипом предлагаемое устройство содержит более простой мультиплексор, адресный вход которого соединен с выходом третьего триггера, а информационные входы связаны с выходами первого и четвертого триггеров. Кроме того, второй вход второго делителя подключен к выходу третьего делителя.
На фиг.1 приведена функциональная схема электропривода.
Электропривод содержит двигатель 1, с валом которого связан фотоимпульсный датчик скорости 8. Якорная обмотка двигателя 1 подключена к выходам (5.3) и (5.4) силового преобразователя 5, выполненного на транзисторной по мостовой схеме, что обеспечивает возможность изменения полярности напряжения, питающего двигатель 1. Модулирующий (5.1) и реверсирующий (5.2) входы силового преобразователя 5 соединены с первым (3.3) и вторым (3.4) выходами реверсивного частотно-фазового дискриминатора 3. К первому входу (3.1) частотно-фазового дискриминатора 3 через первый делитель частоты 13 подключен генератор задающей частоты 4. Преобразователь сигнала датчика 2 содержит второй 6 и третий 7 делители частоты, мультиплексор 9 и четыре триггера (10-13). Выход мультиплексора 9 подключен к входу разрешения второго делителя 6, выход которого соединен со вторым (3.2) входом частотно-фазового дискриминатора 3. Счетный вход второго делителя 6 соединен с входом четвертого триггера 13 и выходом третьего делителя 1, вход которого подключен к генератору задающей частоты 4. Адресный вход мультиплексора 9 подключен к входу сброса триггера 11, выходу триггера. Выход триггера 11 соединен с информационным входом триггера 12, счетный вход которого связан с выходом четвертого триггера 13 и со вторым информационным входом мультиплексора 9, первый информационный вход которого подключен к выходу первого триггера 10. Счетные входы первого 10 и второго 11 триггеров соединены с выходом седьмого триггера 17 и первыми входами первого 18 и второго элементов "ИСКЛЮЧАЮЩЕЕ ИЛИ". К выходу генератора 4 задающей частоты через четвертый делитель частоты 8 подключены счетные входы триггеров 15-17 и 20-22. Первый и второй выходы фотоимпульсного датчика скорости 14 соединены с информационными входами триггеров 15 и 20 соответственно. Выход триггера 15 подключен ко второму входу первого элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ" 18, выход которого соединен с информационным входом триггера 16. Выход триггера 16 подключен ко второму входу второго элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ" 19, выход которого соединен с информационным входом триггера 17. Выход триггера 20 подключен ко второму входу третьего элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ" 23, выход которого соединен с информационным входом триггера 21. Выход триггера 21 подключен ко второму входу четвертого элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ" 24, выход которого соединен с информационным входом триггера 22, выход которого связан с первыми входами элементов "ИСКЛЮЧАЮЩЕЕ ИЛИ" 23, 24 и информационным входом первого триггера 10.
На фиг.2-5 приведены временные диаграммы, поясняющие работу электропривода, где цифрами обозначены сигналы на выходах соответствующих элементов устройства.
Устройство работает следующим образом.
Электропривод представляет собой систему фазовой синхронизации, в которой управление скоростью двигателя 1 осуществляется посредством силового преобразователя 5 в функции фазового рассогласования частотного сигнала задания, поступающего от генератора 4 через первый 13 делитель частоты, и сигнала обратной связи, получаемого после преобразования импульсов с фотоимпульсного датчика скорости 14. Выявление величины фазового рассогласования осуществляется посредством частотно-фазового дискриминатора 3.
Во всех режимах работы электропривода вращение вала двигателя 1 и механически связанного с ним фотоимпульсного датчика 14 приводит к появлению на его первом и втором выходах импульсных сигналов, находящихся в квадратуре [2]. Частота их изменения f14 определяется как

где: Ω - угловая скорость вала двигателя 1;
p - число меток фотоимпульсного датчика 14.
Устройство обеспечивает формирование выходного сигнала по каждому изменению импульса на выходе фотоимпульсного датчика 14. Так как используются две квадратурных последовательности импульсов частота измеряемого сигнала, снимаемого с триггеров 17 и 22'', f17 определяется как:

При этом сохраняется строгое соответствие между направлением вращения вала двигателя 1 и значением сигнала на выходе 14.2 в момент появления импульса на выходе 14.1 фотоимпульсного датчика скорости 14. Для определения направления вращения вала двигателя используется триггер 10.
На фиг.2 представлена графотопологическая схема работы блока подавления помех.
Частота сигнала на выходе третьего 7 делителя частоты t7 определяется как

где f4 - частота генератора 4,
N7 - коэффициент пересчета третьего делителя 27.
Частота f13 выходного сигнала триггера 13 будет в два раза меньше величины f7.
Функция мультиплексора 9, то есть его выходной сигнал D14, определяется, согласно [5], как

где U14 - сигнал на входе управления мультиплексора 14,
(DI1-DI4) - сигналы на первом-четвертом информационных входах мультиплексора 14 соответственно,
A1, A2 - сигналы на первом и втором адресном входах мультиплексора 14 соответственно.
Так как в этом режиме на первом адресном входе мультиплексора 14 присутствует логический нуль, то его выходной сигнал определяется уровнями сигналов на втором или четвертом информационных входах в зависимости от направления вращения вала двигателя 1. Так как на эти входы поступают импульсы частоты f13, то, согласно (4), на выходе мультиплексора возникают импульсы такой же частоты. Относительная длительность этих импульсов равна 0,75. Частота следования импульсов на выходе второго делителя 6 частоты определяется как:

где N6 - коэффициент пересчета делителя 6.
Следовательно, даже при отсутствии вращения вала двигателя 1 происходит переключение частотно-фазового дискриминатора с частотой f6. Это обеспечивает малые потери в двигателе 1 при его работе на малых угловых скоростях.
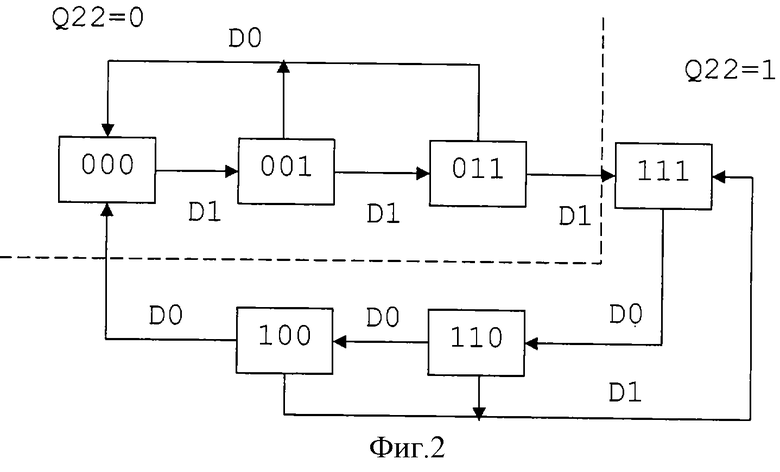
Рассмотрим случай вращения вала двигателя по часовой стрелке. При изменении сигнала на первом 8.1 выходе фотоимпульсного датчика скорости 8, например, при его переходе из состояния логического нуля в логическую единицу, (фиг.3) первый фронт сигнала генератора 4 задающей частоты приводит к изменению состояния триггера 16. При этом на выходе первого элемента 18 "ИСКЛЮЧАЮЩЕЕ ИЛИ" появляется сигнал логической единицы. Это приводит к появлению логического нуля на выходах элемента 25 "ИЛИ-НЕ" и элемента 26 "ИЛИ". Спад этого сигнала вызывает переключение триггера 15, после чего на его выходе, а следовательно, и третьем входе элемента 28 "ИЛИ", устанавливается логическая единица. Этот сигнал запрещает прохождение импульсов с генератора 4 задающей частоты на счетные входы триггеров 16 и 19. При этом сигнал на выходе мультиплексора 27 соответствует направлению вращения вала двигателя 1. Следующий импульс генератора 4 задающей частоты приводит к переключению триггера 17 в состояние логической единицы. Поэтому сигналы на входах элемента 18 "ИСКЛЮЧАЮЩЕЕ ИЛИ" становятся одинаковыми, а на его выходе возникает сигнал логического нуля. Это приводит к восстановлению логической единицы сигналов на выходах элементов 25 "ИЛИ-НЕ" и 26 "ИЛИ". При спаде сигнала на выходе элемента 26 "ИЛИ" на выходе триггера 10 устанавливается сигнал, равный выходному сигналу мультиплексора 27, то есть соответствующий направлению вращения вала двигателя 1. На выходе триггера 11 устанавливается сигнал логической единицы. Первый фронт сигнала с триггера 13 устанавливает на выходе триггера 12 сигнал логической единицы. Это приводит к сбросу выходного сигнала триггеров 10 и 15. Сигнал логической единицы на выходе триггера 12 запрещает прохождение импульсов через мультиплексор 14 при сигнале логической единицы на выходе триггера 10. Так как сброс триггера 12 происходит по следующему фронту импульса триггера 13, то происходит высекание только двух импульсов из последовательности с частотой f7. Длительность сигнала на выходе триггера 12 t12 определяется как

При установленном выходном сигнале триггера 12 на первом входе элемента 28 "ИЛИ" присутствует сигнал логической единицы, что запрещает прохождение импульсов генератора 4 задающей частоты на счетные входы триггеров 16 и 19. Число импульсов в последовательности с частотой f14 уменьшается на единицу. После снятия сигнала с выхода триггера 12 разрешается прохождение импульсов через элемент 26 "ИЛИ" на счетные входы триггеров 16 и 19. Устройство переходит в режим готовности к приему следующего фронта сигнала фотоимпульсного датчика скорости 8.
При сохранении направления вращения следующий момент считывания сигнала с фотоимпульсного датчика 8 происходит при появлении сигнала на втором его выходе. При этом на выходе триггера 19 устанавливается логическая единица, что приводит к несовпадению сигналов на входах элементов 22 и 23 "ИСКЛЮЧАЮЩЕЕ ИЛИ", а следовательно, к появлению логической единицы на выходах этих элементов. Сигналы с выходов элемента 23 и триггера 19 изменяют значение адреса мультиплексора 27. Поэтому к его выходу подключается другой информационный вход, значение сигнала на входе которого определяется направлением вращения. При вращении вала двигателя по часовой стрелке на выход мультиплексора передается сигнал логической единицы. Сигнал с выхода элемента 22 приводит к появлению логической единицы на выходах элементов 25 "ИЛИ-НЕ" и 26 "ИЛИ". При этом устанавливается сигнал на выходе триггера 15, что запрещает прохождение импульсов с генератора 4 задающей частоты на счетные входы триггеров 16 и 19. Следующий импульс генератора 4 задающей частоты устанавливает логическую единицу на выходе триггера 20. Это уравнивает сигналы на входах элемента 22 "ИСКЛЮЧАЮЩЕЕ ИЛИ". Поэтому на его выходе устанавливается сигнал логического нуля, что приводит к пропаданию сигналов на выходах элементов 4 "И" и 26 "ИЛИ". Спад выходного сигнала элемента 26 "ИЛИ" приводит к установке на выходе триггера 10 сигнала, равного выходному сигналу мультиплексора 27 и появлению логической единицы на выходе триггера 11. Следующий импульс генератора задающей частоты устанавливает логическую единицу на выходе триггера 21, что приводит к появлению логического нуля на выходе элемента 23 "ИСКЛЮЧАЮЩЕЕ ИЛИ". При этом может измениться выходной сигнал мультиплексора 27. Это не сказывается на работе устройства, так как сигнал направления вращения вала двигателя 1 уже зафиксирован триггером 10.
Ближайший фронт импульса с триггера 13 приводит к появлению логической единицы на выходе триггера 12. Этот сигнал сбрасывает триггер 15 и в во время своего присутствия запрещает переключение триггеров 16 и 19. Логическая единица на выходе триггера 12 сохраняется в течение промежутка времени t12, определяемого выражением (6). За это время происходит высекание двух импульсов с выхода делителя 7 частоты. Число импульсов в последовательности с частотой f14 уменьшается на единицу. После снятия сигнала с выхода триггера 12 разрешается прохождение импульсов через элемент 26 "ИЛИ" на счетные входы триггеров 16 и 19. Устройство переходит в режим готовности к приему следующего фронта сигнала фотоимпульсного датчика скорости 8.
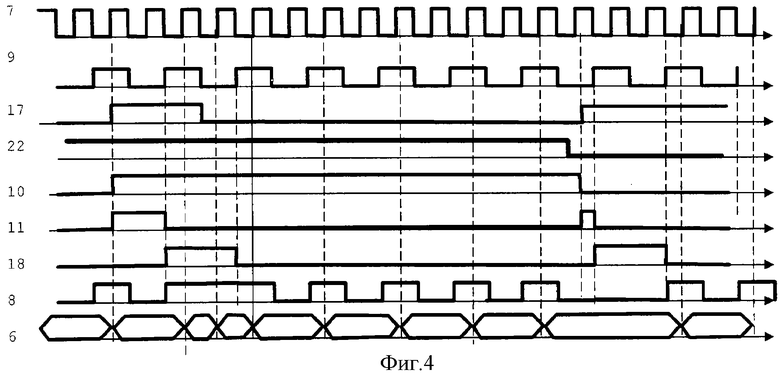
При изменении направления вращения вала двигателя 1 (фиг 4) элементы, формирующие последовательность импульсов с выхода элемента 26 "ИЛИ", работают аналогично вышеизложенному. В этом случае изменяется только значение выходного сигнала мультиплексора при спаде сигнала с выхода элемента 26 "ИЛИ" за счет изменения адресных сигналов на его входах. Соответственно изменяется и записываемый в триггер 10 сигнал. Поэтому в течение действия импульса с выхода триггера 12 t12 разрешается прохождение через мультиплексор 14 импульсов с выхода делителя 7 частоты. При этом каждое изменение сигналов на выходах фотоимпульсного датчика 8 скорости приводит к появлению дополнительного импульса в последовательности с частотой f14.
Таким образом, очевидно, что при повороте вала двигателя на угол Δϕ, равный четверти расстоянию между метками фотоимпульсного датчика 8 скорости, происходит добавление или высекание одного импульса в последовательность с частотой f14. При этом

Общее число импульсов на выходе мультиплексора 14 в промежуток времени, между импульсами с выхода элемента 26 "ИЛИ" t26, определяется как

где T13=f23 -1 - период частоты выходного сигнала триггера 13.
Среднее значение частоты выходного сигнала мультиплексора 14 может быть найдено исходя из (8) с учетом (2) по следующему выражению:

Текущее положение t14[j] импульсов частоты f14 может быть определено как

где N8 - число импульсов с датчика 8, пришедшее за рассматриваемый промежуток времени Т.
Очевидно, что величина t14[j] однозначно определяется числом импульсов, пришедшим с датчика 8, то есть углом поворота вала двигателя 1. Среднее значение частоты, снимаемой с делителя 6

где p*=4р/N6 - эквивалентное число меток измерителя скорости.
Таким образом, сохраняется взаимное соответствие между угловой скоростью вала двигателя 1 и частотой сигнала на выходе делителя 6 частоты. Такое взаимное соответствие сохраняется и между положением вала двигателя 1 и импульсов на выходе делителя 6 частоты.
На входы частотно-фазового дискриминатора 3 поступают импульсы частоты задания с делителя 9 - f9 и обратной связи с преобразователя 2 сигнала фотоимпульсного датчика скорости 8 - f8. В режиме стабилизации скорости двигателя 1, когда частоты сигналов задания и обратной связи примерно равны, длительность импульсов на первом или втором выходах частотно-фазового дискриминатора 3 определяется разностью фаз этих сигналов. Если f9>f6, широтно-импульсный сигнал появляется на первом выходе частотно-фазового дискриминатора 3, соединенном с модулирующим входом силового преобразователя 5. При этом сигнал на втором его выходе остается постоянным. При f9<f6 широтно-импульсный сигнал появляется на втором выходе частотно-фазового дискриминатора 3, соединенном с реверсирующим входом силового преобразователя 5. При этом сигнал на первом его выходе остается постоянным. При значительной разности входных частот частотно-фазовый дискриминатор 3 переходит в режим частотного сравнения сигналов, характеризуемый следующими соотношениями:
где γ3.1 и γ3.2 - относительные длительности широтно-импульсных сигналов на первом и втором выходах частотно-фазового дискриминатора 3 соответственно.
Отклонение выходной частоты делителя 6 по сравнению с частотой f9 на первом входе частотно-фазового дискриминатора 3 изменяет взаимное фазовое положение импульсов этих сигналов. При этом изменяется длительность импульса широтно-импульсного сигнала на его втором выходе на ΔT[i]. Величина этого приращения ΔT[i] находится из следующих соображений. Фазовое рассогласование t[i] импульсов частотно-фазового дискриминатора 3 на рассматриваемом интервале определяется как

где t[i-1] - величина фазового рассогласования импульсов управления частотно-фазовым дискриминатором 3 на (i-1) интервале
Т9 - период сигнала на выходе делителя 9 частоты.
Поэтому приращение ΔT[i] за один период выходного сигнала делителя 6 t[i-1] может быть найдено как

Так как в квазиустановившемся режиме период частоты на первом входе частотно-фазового дискриминатора 3 постоянен и Т9=Т6, то можно считать, что величина ΔT[i] определяется только изменением периода частоты второго делителя. За время одного периода выходного сигнала делителя 9 частоты положение импульса с делителя 6 частоты определяется с использованием выражения (10) как

В общем случае за период частоты f6 приходит несколько импульсов датчика 8, число которых N8 определяется как

где 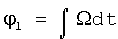 - угол поворота вала двигателя 1 за рассматриваемый промежуток времени.
- угол поворота вала двигателя 1 за рассматриваемый промежуток времени.
С учетом (15) и (16) приращение длительности выходного сигнала частотно-фазового дискриминатора определяется как

Задержка изменения положения импульса делителя 6 зависит от состояния этого делителя в момент формирования импульса с датчика скорости 8. Очевидно, что она не может превышать длительности периода выходного сигнала делителя 6 частоты.
Погрешность определения положения импульса делителя 6 возникает из-за дискретности его формирования. Ее величина определяется разностью периода этой частоты и его идеального значения. Разность этих величин находится из следующего выражения

где k - целое число импульсов датчика 8 за время Т26.
Величина δT, отнесенная к периоду идеального значения преобразованной частоты фотоимпульсного датчика, соответствующей определенному значению угла поворота вала двигателя 1, является относительной погрешностью δϕ преобразования его текущего положения, которая находится по выражению вида

Максимальное значение δϕ не превышает N6 -1. При N6>1000, обеспечивается погрешность измерения положения вала двигателя 1 не более 0.02%.
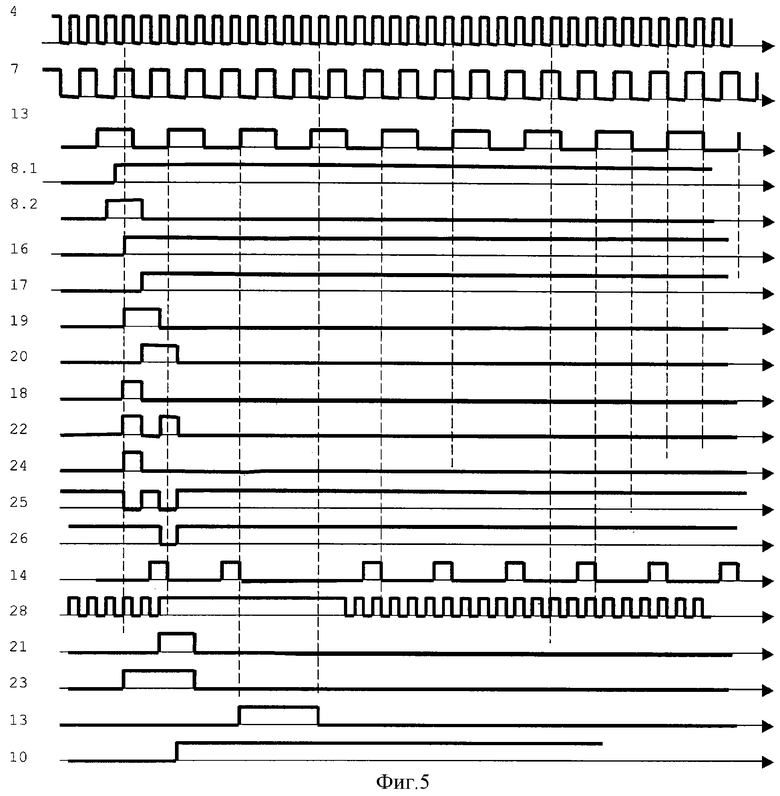
Таким образом в при работе на относительно больших скоростях вращения вала двигателя 1 обеспечивается измерение положения вала двигателя и его скорости с минимальными погрешностями. При увеличении разрешающей способности фотоимпульсного датчика скорости 8 и снижении уровня рабочих скоростей на положение импульсов с выхода датчика начинают сказываться пульсации скорости, обусловленные характером выходного напряжения силового преобразователя 5. Особенно это характерно для синхронно-синфазных систем электропривода с широким диапазоном регулирования угловой скорости. В этом случае вал двигателя 1 пульсирует около некоторого заданного положения, что приводит к появлению фронтов импульсов фотоимпульсного датчика скорости 8, следующих с высокой частотой при практически полном отсутствии перемещения вала двигателя 1. Если эти сигналы следуют с интервалом времени, большем чем T13, то устройство работает в рабочем режиме, рассматривая поступающие импульсы как имеющие различное направление вращения. Если интервал между этими фронтами становится меньшим, чем T13, то в принципе возможен пропуск одного информационного фронта, что ведет к искажению информации о действительном положении вала двигателя. Для устранения пропадания информации о действительном положении вала двигателя в предлагаемом устройстве используются триггер 15 и элемент 28 "ИЛИ". Временные диаграммы работы устройства в таком режиме показаны на фиг.5. При этом рассматривается случай, когда интервал времени между фронтом и спадом сигнала на первом 8.1 выходе фотоимпульсного датчика скорости 8 меньше T13. После фронта выходного сигнала фотоимпульсного датчика скорости 8 первый фронт импульса генератора 4 задающей частоты устанавливает триггер 16. При этом на выходе элемента 18 "ИСКЛЮЧАЮЩЕЕ ИЛИ" появляется сигнал логической единицы, который приводит к сбросу выходного сигнала элемента 26 "ИЛИ". В этот момент устанавливается триггер 15 и запрещает дальнейшее прохождение импульсов с генератора 4 задающей частоты на счетные входы триггеров 16 и 19. Эти триггеры сохраняют информацию о сигналах на выходах фотоимпульсного датчика скорости 8 в момент появления импульса с генератора 4 задающей частоты. Следующий фронт импульса этого генератора устанавливает триггер 17, что приводит к появлению логической единицы на выходе элемента 26 "ИЛИ". Фронт этого сигнала устанавливает триггер 11 и записывает в триггер 10 уровень сигнала, соответствующий направлению вращения вала двигателя 1. Фронт выходного сигнала триггера 13 устанавливает логическую единицу на выходе триггера 12, что приводит к сбросу триггеров 11 и 15. Несмотря на сброс сигнала с выхода триггера 15 прохождение сигналов с генератора 4 задающей частоты на счетные входы триггеров 16, 19 не допускается, так как на первом выходе элемент "ИЛИ" 28 находится сигнал логической единицы. На период выходного сигнала триггера 13 запрещается прохождение импульсов через мультиплексор 14. Следовательно, из выходной последовательности с частотой f14 высекается один импульс. После сброса триггера 12 первый же импульс с генератора 4 задающей частоты сбрасывает триггер 16, так как на его информационном входе присутствует сигнал логического нуля. При этом на выходе элемента 18 "ИСКЛЮЧАЮЩЕЕ ИЛИ" возникает логическая единица, что приводит к сбросу выходного сигнала элемента 26 "ИЛИ". При этом триггер 15 устанавливается и запрещает прохождение импульсов с генератора 4 задающей частоты на счетные входы триггеров 16 и 19. Следующий фронт импульса с выхода генератора 4 задающей частоты приводит к сбросу триггера 17 и появлению логического нуля на выходе элемента 18 "ИСКЛЮЧАЮЩЕЕ ИЛИ". При этом на выходе элемента 26 "ИЛИ" возникает логическая единица, появление которой приводит к установке триггера 11 и инверсии выходного сигнала триггера 10. Фронт выходного сигнала триггера 13 устанавливает триггер 12 и сбрасывает триггера 11 и 15. За время наличия сигнала на выходе триггера 12 с учетом выходного сигнала триггера 10 через мультиплексор 14 на вход второго делителя 6 частоты проходят 2 импульса с выхода делителя 7 частоты. Это соответствует добавлению одного импульса в последовательность импульсных сигналов с частотой f14. После сброса триггера 12 устройство готово к приему следующего фронта сигнала с выходов фотоимпульсного датчика скорости 8. При возникновении аналогичной ситуации на втором выходе фотоимпульсного датчика скорости 8 устройство работает аналогичным образом.
Таким образом, даже очень короткие импульсы с любого выхода фотоимпульсного датчика скорости 8 не приводят к потери информации о действительном положении вала двигателя 1.
При наличии протяженных связей между устройством и фотоимпульсным датчиком скорости 8 возможно появление синфазных помех, действие которых выражается в одновременном появлении фронтов с выхода измерительного преобразователя. Для устранения этого явления в устройстве используются элементы 24 "И", 25 "ИЛИ-НЕ" и 26 "ИЛИ". Устройство при появлении синфазной помехи работает следующим образом (фиг.5). Пусть на выходах фотоимпульсного датчика скорости 8 возникают импульсы, фронты которых отстоят друг от друга меньше, чем период частоты генератора 4. При этом перепад сигнала 8.1 фотоимпульсного датчика скорости 8 является полезным. Короткий импульс на выходе 8.2 представляет синфазную помеху. В этом случае триггера 16 и 19 переключаются одновременно. При этом на выходах элементов 18 и 22 "ИСКЛЮЧАЮЩЕЕ ИЛИ" также одновременно появляются логические единицы. При этом на выходе элемента 25 "ИЛИ-НЕ" возникает логический нуль. Сигналы с выходов элементов 18 и 22 "ИСКЛЮЧАЮЩЕЕ ИЛИ", проходя через элемент "И" 24, приводят появлению логической единицы на первом выходе элемента 26 "ИЛИ". Этот факт запрещает изменение выходного сигнала элемента 26 "ИЛИ", а следовательно, переключения триггеров 15 и 11 не происходит. Следовательно, не изменяется и частота выходного сигнала мультиплексора 14, то есть устраняется ложное срабатывание устройства. В дальнейшем за счет переключений триггеров 19-21 формируются импульсы запуска триггера 11, а в триггер 10 записывается сигнал, соответствующий действительному направлению вращения вала двигателя 1. Импульс на выходе триггера 12 приводит к высеканию одного импульса из последовательности сигналов на выходе мультиплексора 14.
Из приведенных выше соотношений следует, что использование предлагаемого устройства обеспечивает электронное увеличение разрешающей способности фотоимпульсного датчика скорости, при котором сохраняется зависимость между положением импульса обратной связи и вала двигателя 1. Это позволяет использовать предлагаемый электропривод в фазовых системах стабилизации скорости, обладающих более высокими точностными характеристиками по сравнению с электроприводами, базирующимися на измерении периода выходного сигнала фотоимпульсного датчика [6]. Кроме того, предлагаемый электропривод обеспечивает защиту от одновременного появления фронтов выходных сигналов фотоимпульсного датчика скорости без потери полезной информации о положении вала. Поэтому возможно его использование в системах, базирующихся на применении фотоимпульсных датчиков скорости с высокой (более 100000 дискрет на оборот) разрешающей способностью и в синхронно-синфазных системах управления, работающих при малых отклонениях положения вала от заданного значения.
Уровень угловой скорости не зависит от напряжения питающей сети и колебаний температуры, а определяется только нестабильностью генератора 4 задающей частоты, которая при использовании кварцевых резонаторов не превышает 10-5 %. Электропривод прост по конструкции и не содержит аналоговых и настраиваемых элементов.
Источники информации
1. Файнштейн В.Г. Микропроцессорные системы управления электроприводами. - М.: Энергоатомиздат, 1986.
2. Схемотехника цифровых преобразователей перемещения: Справочное пособие / В.Г.Домрачев, В.Р.Матвеевский, Ю.С.Смирнов. - М.: Энергоатомиздат, 1987. - 392 с.
3. Андрущук В.В. Цифровые системы измерения параметров движения механизмов в машиностроении. - СПб.: Политехника, 1992. - 237 с.
4. Патент РФ №2161365 кл. Н02Р 5/06. Опубл. БИ №36, 2000.
5. Пухальский Г.И., Новосельцева Т.Я. Проектирование дискретных устройств на интегральных микросхемах. - М.: Радио и связь, 1990.
6. Трахтенберг P.M. Импульсные астатические системы электропривода с дискретным управлением. - М.: Энергоиздат, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2260897C2 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2161365C1 |
| ЭЛЕКТРОПРИВОД | 1996 |
|
RU2127940C1 |
| Электропривод постоянного тока | 1991 |
|
SU1786630A1 |
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130688C1 |
| Электропривод постоянного тока | 1991 |
|
SU1775833A1 |
| Электропривод постоянного тока | 1987 |
|
SU1411910A1 |
| Электропривод постоянного тока | 1985 |
|
SU1267575A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2003 |
|
RU2258297C2 |
Изобретение относится к электротехнике, а именно к системам стабилизации угловой скорости построенным на базе контура фазовой синхронизации. Изобретение решает задачу расширения области применения электропривода за счет увеличения помехоустойчивости канала измерения управляемой координаты. Для достижения указанного технического результата в предлагаемом устройстве для преобразования сигнала фотоимпульсного датчика скорости/положения вала используются шесть триггеров, два элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ" и четыре мультиплексора. Применение этих элементов обеспечивает увеличение помехозащищенности устройства, особенно при протяженных линиях связи между двигателем, на валу которого установлен фотоимпульсный датчик скорости/положения, и устройством управления. 5 ил.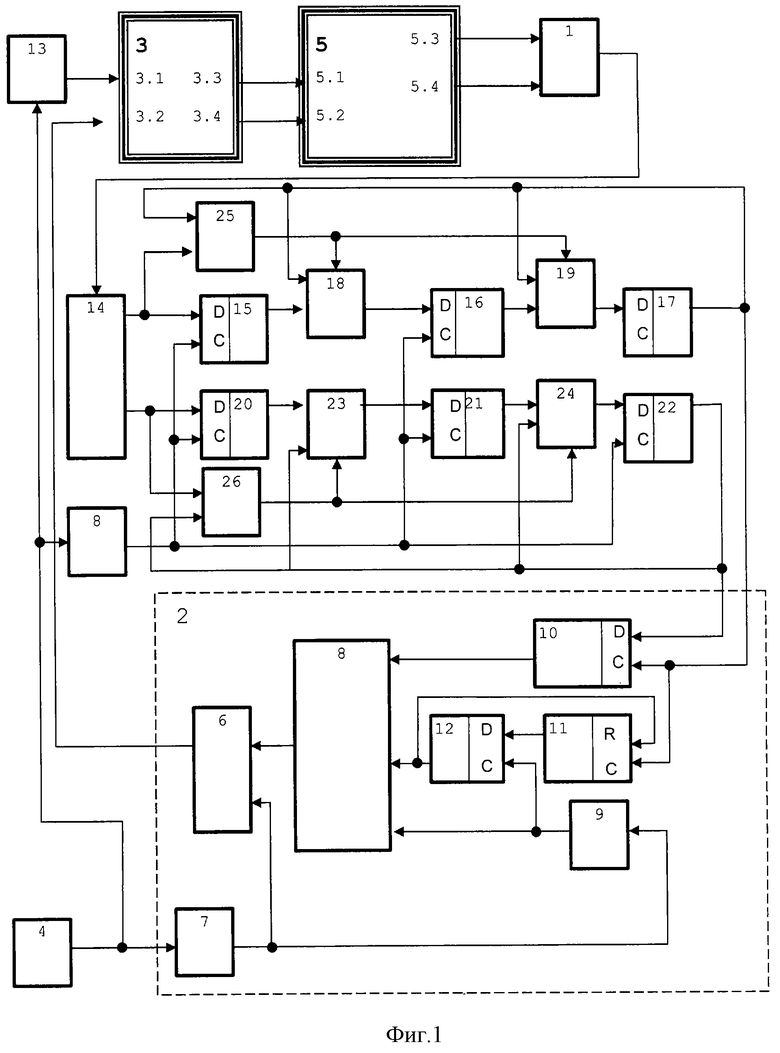
Электропривод, содержащий фотоимпульсный датчик скорости, установленный на валу двигателя, подключенного к силовому преобразователю, модулирующий и реверсирующий входы которого соединены с первым и вторым выходами частотного-фазового, дискриминатора, первый вход которого через первый делитель частоты связан с выходом генератора задающей частоты, подключенного через третий делитель частоты и четвертый триггер к счетному входу третьего триггера и первому информационному входу первого мультиплексора, адресный вход которого соединен с входом сброса второго триггера и выходом третьего триггера, информационный вход которого связан с выходом второго триггера, счетный вход которого объединяется со счетным входом первого триггера, а между выходом первого мультиплексора и вторым входом фазового дискриминатора включен второй делитель, отличающийся тем, что в устройство введены два элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ", четыре мультиплексора, четвертый делитель и шесть триггеров, счетные входы которых через четвертый делитель подключаются к выходу генератора задающей частоты, а выход седьмого триггера связан со счетным входом первого триггера, первым входом первого элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ" и первыми входами второго и третьего мультиплексоров, выходы которых соединены с информационными входами шестого и седьмого триггеров соответственно, в то время как вторые входы третьего и второго мультиплексоров соединены с выходами шестого и пятого триггеров, причем информационный вход последнего подключен ко второму входу первого элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ", выход которого связан со входами управления второго и третьего мультиплексоров, и к первому выходу фотоимпульсного датчика скорости, второй выход которого соединен со вторым входом второго элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ" и с информационным входом восьмого триггера, выход которого связан со вторым входом четвертого мультиплексора, выход которого подключен к информационному входу девятого триггера, выход которого соединен со вторым входом пятого мультиплексора, первый вход которого связан с первым входом четвертого мультиплексора, информационным входом первого триггера, первым входом второго элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ" и выходом десятого триггера, информационный вход которого подключен к выходу пятого мультиплексора, вход управления которого соединен с информационным входом третьего мультиплексора и выходом второго элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ", в то время как выход третьего делителя соединен со вторым входом второго делителя, а ко второму информационному входу первого мультиплексора подсоединен выход первого триггера.
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2161365C1 |
| Электропривод постоянного тока | 1987 |
|
SU1411910A1 |
| Световое перо | 1982 |
|
SU1084840A1 |

