Изобретение относится к электротехнике и может быть использовано в системах регулирования угловой скорости, в частности электропривода, построенных на базе принципов фазовой синхронизации.
Известен ряд электроприводов [1], построенных на базе цифровых измерителей скорости, основным элементом которых являются фотоимпульсные датчики 12,3] . В большинстве цифровых измерителей скорости ее величина определяется путем подсчета количества импульсов датчика за фиксированный промежуток времени или путем измерения длительности одного или нескольких периодов сигнала фотоимпульсного датчика [1,3]. Первый способ построения цифровых измерителей скорости характеризуется низкой погрешностью ее измерения в области больших значений угловой скорости. При втором способе с повышением величины измеряемой скорости точность ее измерения падает. В зоне низких и инфранизких угловых скоростей даже при использовании измерительных преобразователей с высокой разрешающей способностью период квантования их выходного сигнала достигает столь больших значений, что обеспечение малой погрешности стабилизации регулируемых координат путем подсчета количества импульсов или измерения периода сигнала датчика становится практически невозможной. Поэтому в прецизионных системах электропривода используются сельсины, синусно-косинусные вращающиеся трансформаторы или фотоэлектрические растровые интерполяторы.
Наиболее близким к предлагаемому устройству является электропривод постоянного тока [4], функциональная схема которого приведена на фиг. 1.
Электропривод содержит двигатель 1, с валом которого связан датчик 2 скорости. Выход датчика 2 соединен с первым входом частотно-фазового дискриминатора 3, ко второму входу которого подключен генератор 4 задающей частоты. Выходы частотно-фазового дискриминатора 3 соединены с модулирующим и реверсирующим входами силового преобразователя 5, выполненного на транзисторах 6-9 по мостовой схеме, в диагональ которой включен двигатель 1. Частотно-фазовый дискриминатор 3 состоит из триггеров 10-13, элементов ИЛИ 14 и 15 и элементов И 16 и 17. Счетные входы триггеров 10 и 12, являющиеся вторым входом дискриминатора 3, соединены с выходом генератора 4 задающей частоты. Выход триггера 10 связан с информационным входом триггера 13 и первым входом элемента ИЛИ 15, второй вход которого подключен к выходу триггера 13 и первому входу элемента И 17. Выход элемента ИЛИ 15 соединен с информационным входом триггера 11, счетный вход которого, соединенный со счетным входом триггера 13, является первым входом частотно-фазового дискриминатора 3. Входы установки триггеров 12 и 13 соединены с выходом элемента И 17. Выход триггера 11 связан с информационным входом триггера 12 и первым входом элемента ИЛИ 14, второй вход которого подключен к выходу триггера 12 и второму входу элемента И 17. Выход элемента ИЛИ 14 соединен с информационным входом триггера 10. Входы сброса триггеров 10 и 11 соединены с выходом элемента И 16. Входы элемента И 16 подключены к выходам триггеров 10 и 11. Выходы триггеров 12 и 13 являются первым и вторым выходами частотно-фазового дискриминатора 3.
Такой электропривод обеспечивает широкий диапазон регулирования угловой скорости и сравнительно малую погрешность ее стабилизации. Использование в качестве датчика обратной связи сельсина не позволяет получить высокую точность стабилизации текущего положения вала. В широкодиапазонных электроприводах удобно использовать СКВТ, но их точность измерения положения вала значительно уступает точности измерения с помощью фотоимпульсных датчиков, имеющих высокую разрешающую способность. Существенным недостатком последних является ограничение их применения на малых скоростях.
Технический результат предлагаемого изобретения заключается в увеличении точности стабилизации текущего положения вала двигателя за счет уменьшения погрешности его измерения и расширении сферы применения устройства в широкодиапазонных электроприводах. Это достигается использованием фотоимпульсного датчика с высокой разрешающей способностью и схемы преобразования его выходных сигналов.
Для этого в известное устройство введен первый делитель частоты, а в качестве измерителя скорости используется фотоимпульсный датчик и схема преобразования его выходных сигналов, содержащая два делителя частоты, четыре триггера и мультиплексор (фиг. 2). Первый делитель частоты включен между выходом генератора задающей частоты и первым входом частотно-фазового дискриминатора. Выходы фотоимпульсного датчика соединены с информационным и счетным входами первого (Т5) из новых триггеров. Его счетный вход подключен к счетному входу второго (Т6) триггера, вход сброса которого связан с первым адресным входом мультиплексора и выходом третьего (Т7) триггера, счетный вход которого объединен с выходом четвертого (Т8) триггера и вторым и четвертым информационными входами мультиплексора. Информационный вход третьего (Т7) триггера соединен с выходом второго (Т6) триггера. Выход первого (Т5) триггера подключен ко второму адресному входу мультиплексора, на первый информационный вход которого подан сигнал логического нуля, а на третий - логической единицы. Счетный вход четвертого (Т8) триггера соединен со входом управления мультиплексора, выход которого через второй делитель частоты соединен со вторым входом частотно-фазового дискриминатора. Вход четвертого (Т8) триггера через третий делитель частоты связан с выходом генератора задающей частоты.
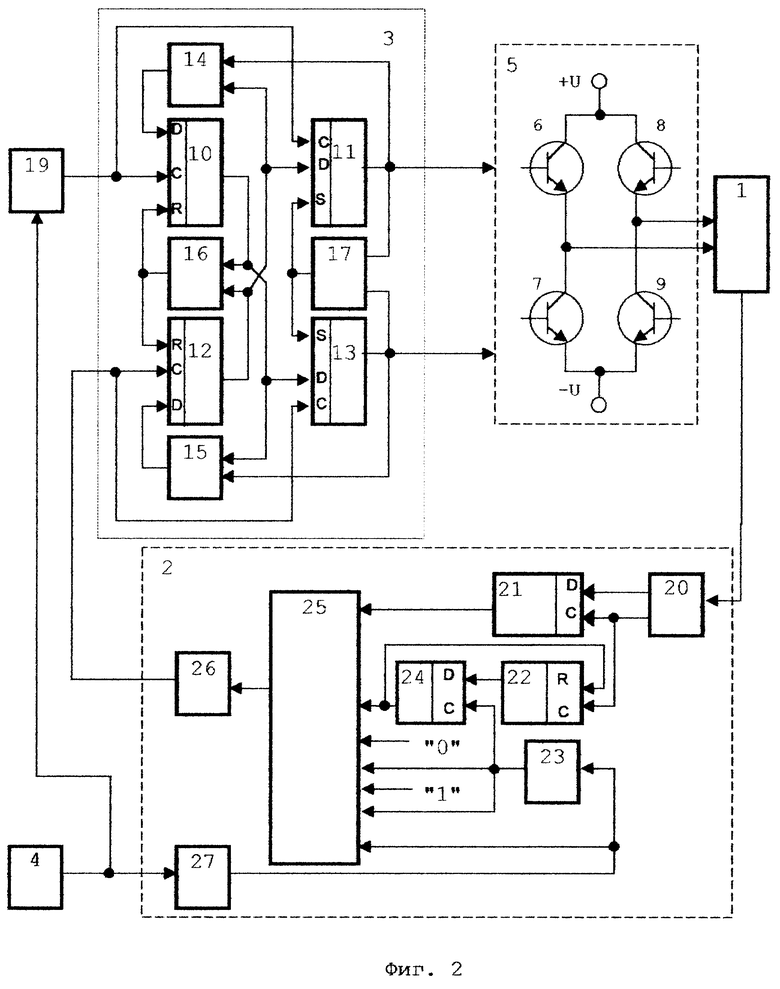
На фиг. 2 приведена функциональная схема электропривода.
Электропривод содержит двигатель 1, с валом которого связан измеритель скорости 2. Якорная обмотка двигателя 1 включена в диагональ моста силового преобразователя 5, выполненного на транзисторах 6-9. Модулирующий и реверсирующий входы силового преобразователя 5 соединены с первым и вторым выходами частотно-фазового дискриминатора 3. К первому входу частотно-фазового дискриминатора 3 через первый делитель частоты 19 подключен генератор задающей частоты 4. Частотно-фазовый дискриминатор 3 содержит четыре триггера (10-13), два элемента ИЛИ (14, 15) и два элемента И (16, 17). Счетные входы первого 10 и второго 11 триггеров подключены к первому входу частотно-фазового дискриминатора 3, второй вход которого связан со счетными входами третьего 12 и четвертого 13 триггеров. Информационные входы первого 10 и третьего 12 триггеров связаны с выходами элементов ИЛИ 14 и 15 соответственно. Входы сброса триггеров 10 и 12 соединены с выходом первого элемента И 16, второй вход которого связан с выходом триггера 12, информационным входом триггера 11 и вторым входом элемента ИЛИ 14, Первый вход последнего соединен с первым выходом частотно-фазового дискриминатора 3, выходом триггера 11 и первым входом элемента И 17. Второй вход элемента И 17 связан со вторым выходом частотно-фазового дискриминатора 3, выходом триггера 13 и вторым входом элемента ИЛИ 15, первый вход которого соединен с первым входом элемента И 18, выходом триггера 10 и информационным входом триггера 13, Входы сброса триггеров 11 и 13 подключены к выходу элемента И 17. Измеритель скорости 2 содержит фотоимпульсный датчик скорости 20, второй 26 и третий 27 делители частоты, четыре триггера (21-24) и мультиплексор 25. Выход мультиплексора 25 через второй делитель частоты 26 соединен со вторым входом частотно-фазового дискриминатора 3. Первый адресный вход мультиплексора 25 подключен к входу сброса триггера 22 и выходу триггера 24. Второй адресный вход мультиплексора 20 соединен с выходом триггера 21, информационный и счетный входы которого соединены с первым и вторым выходами фотоимпульсного датчика скорости 20. Информационный вход триггера 24 соединен с выходом триггера 22. Его счетный вход связан со вторым выходом фотоимпульсного датчика скорости 20. Счетный вход триггера 24, второй и четвертый информационные входы мультиплексора 25 соединены с выходом триггера 23. Вход триггера 23 подключен к выходу третьего делителя частоты 27 и входу управления мультиплексора 25. На первый информационный вход мультиплексора 25 подан сигнал логического нуля, а на третий - логической единицы. К генератору 4 задающей частоты подключен вход третьего делителя частоты 27.
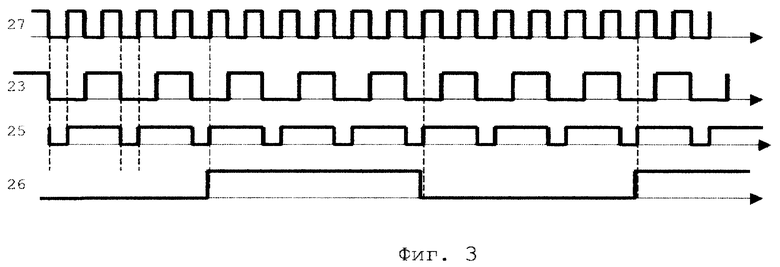
На фиг. 3-6 приведены временные диаграммы, поясняющие работу электропривода, где цифрами обозначены сигналы на выходах соответствующих элементов устройства.
Устройство работает следующим образом.
Электропривод представляет собой систему фазовой синхронизации, в которой управление скоростью двигателя 1 осуществляется в функции фазового рассогласования частотных сигналов задания и обратной связи. Выявление величины фазового рассогласования осуществляется посредством частотно-фазового дискриминатора 3. На его входы поступают импульсы частоты задания с делителя 19 - f19 и обратной связи с измерителя скорости двигателя - f26. В режиме стабилизации скорости двигателя 1, когда частоты сигналов задания и обратной связи примерно равны, длительность импульсов на первом или втором выходах частотно-фазового дискриминатора 3 определяется разностью фаз этих сигналов. Если f19>f26, широтно-импульсный сигнал появляется на первом выходе частотно-фазового дискриминатора 3, соединенном с модулирующим входом силового преобразователя 5. В противном случае широтно-импульсный сигнал появляется на втором выходе частотно-фазового дискриминатора 3, соединенном с реверсирующим входом силового преобразователя 5. При неравенстве входных частот дискриминатор 3 переходит в режим частотного сравнения сигналов, характеризуемый следующими соотношениями:
где γ3.1 и γ3.2 _ относительные длительности широтноимпульсных сигналов на первом и втором выходах частотно-фазового дискриминатора 3 соответственно.
Во всех режимах работы электропривода вращение вала двигателя 1 и механически связанного с ним фотоимпульсного датчика 20 приводит к появлению на его первом и втором выходах сигналов сдвинутых по пространственной фазе на π/2 относительно друг друга, то есть находящихся в квадратуре [2]. Частота их изменения f20 определяется как
где Ω - угловая скорость вала двигателя 1;
p - число меток фотоимпульсного датчика 20.
При изменении направления вращения вала двигателя 1 изменяется взаимное положение этих импульсов по пространственной фазе на угол π. Поэтому фронтам импульсов на втором выходе фотоимпульсного датчика 20 соответствуют разные по уровню (высокий или низкий) сигналы на первом его выходе и, соответственно, разные уровни выходного сигнала триггера 21. Примем, что вращению вала двигателя 1 по часовой стрелке соответствует сигнал высокого уровня на выходе триггера 21. При противоположном направлении вращения вала двигателя 1 на выходе триггера 21 появляется сигнал низкого уровня. Таким образом, триггер 21 выявляет знак направления вращения в виде логических сигналов высокого и низкого уровней.
В отсутствии фронта импульса с фотоимпульсного датчика 20 (фиг. 3) на выходе триггера 22 присутствует сигнал низкого уровня. Функция изменения выходного сигнала триггера 24 имеет вид
где Q24[i] и D24[i] - сигналы на выходе и информационном входе триггера 24;
Q23[i] и Q23[i-τ ] - выходные сигналы триггера 23 в моменты времени (i) и (i-τ ) соответственно.
Поэтому выходные импульсы триггера 23 не изменяют величину выходного сигнала триггера 24, который сохраняет высокий уровень.
Частота сигнала на выходе третьего делителя 27 f27 определяется как
где f4 - частота генератора 4,
N27 - коэффициент пересчета третьего делителя 27.
Частота f23 выходного сигнала триггера 23 - в два раза меньше величины f27.
Функция мультиплексора 25, то есть его выходной сигнал D25, определяется, согласно [5], как
где U25 - сигнал на входе управления мультиплексора 25,
(DI1 - DI4) - сигналы на первом - четвертом информационных входах мультиплексора 25 соответственно,
A1, A2 - сигналы на первом и втором адресном входах мультиплексора 25 соответственно.
Так как в этом режиме сигнал на первом адресном входе мультиплексора 25 имеет высокий уровень, то его выходной сигнал определяется уровнями сигналов на втором или четвертом информационных входах в зависимости от направления вращения вала двигателя 1. Так как на эти входы поступают импульсы частоты f23, то, согласно (5), на выходе мультиплексора возникают инверсные импульсы такой же частоты. Относительная длительность этих импульсов равна 0,75 (фиг. 3). Частота следования импульсов на выходе второго делителя 26 определяется как
где N26 - коэффициент пересчета делителя 26.
Такое значение частоты сигнала на выходе делителя 26 имеет место при нулевой скорости двигателя 1. Известно, что для фазовой системы электропривода состояние равновесие достигается при равенстве частот на первом и втором входах частотно-фазового дискриминатора 3
(f19=f26 (7)
Так как  то условие задания нулевой скорости двигателя 1 определяется как
то условие задания нулевой скорости двигателя 1 определяется как
где N19 - коэффициент пересчета делителя 19.
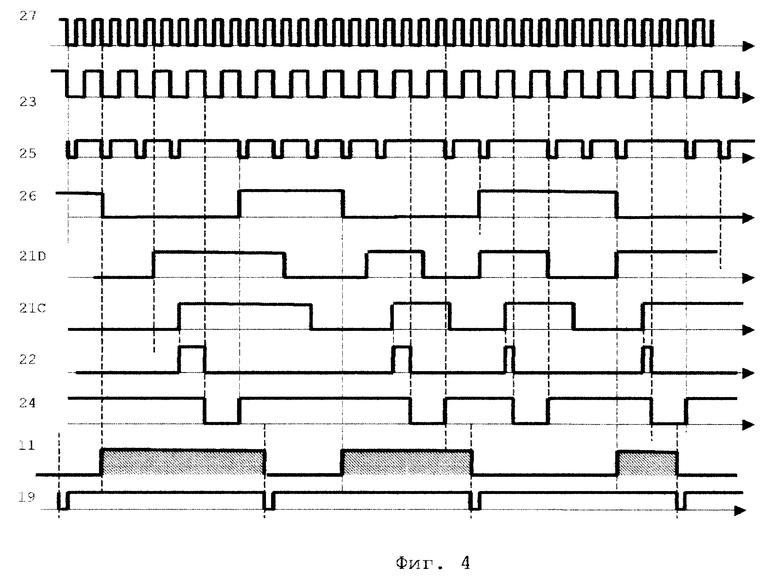
При вращении вала двигателя 1 по часовой стрелке (фиг. 4) появляются импульсы на выходах фотоимпульсного датчика 20. При этом на втором выходе дискриминатора 3 и связанном с ним выходе триггера 13 присутствует широтно-импульсный сигнал. Фронт этого сигнала определяется импульсом с делителя 26, а спад - импульсом с делителя 19. При этом сигнал на выходе триггера 21 имеет высокий уровень. Фронт импульса со второго выхода фотоимпульсного датчика 20 устанавливает высокий уровень сигнала на выходе триггера 22. Ближайший к этому моменту времени фронт импульса с триггера 23, согласно (3), сбрасывает триггер 24. Это приводит к возвращению триггера 22 в исходное состояние, так как на входе его сброса появляется сигнал низкого уровня. При полученной комбинации сигналов на адресных входах мультиплексора 25 (A1=0 и A2=1) сигнал на его выходе, определяемый как D25= U25∨DI3, тождественно равен логической единице, так как DI3=1. Следовательно, запрещается прохождение импульсов с выхода делителя 27 на выход мультиплексора 25. Такое состояние сохраняется в течение одного периода выходного сигнала триггера 23. В момент его окончания на выходе триггера 24 устанавливается сигнал высокого уровня. При этом устанавливается такая комбинация сигналов - на адресных входах мультиплексора 25, которая разрешает прохождение каждого второго импульса с делителя 27 на выход мультиплексора 25. При появлении следующего фронта на втором выходе фотоимпульсного датчика 20 процессы повторяются. Так как в течение периода T20 выходного сигнала фотоимпульсного датчика 20 происходит "высекание" одного импульса из выходной частоты мультиплексора 25, то общее их число за это время определяется как
где T23=f23 -1 - период частоты выходного сигнала триггера 23.
Среднее значение частоты выходного сигнала мультиплексора 25 может быть найдено исходя из (9) по следующему выражению:
Текущее положение t25[j] импульсов частоты f25 может быть определено как
t25[j] = (j+N20)•T23, (11)
где N20 - число импульсов с датчика 20, пришедшее за рассматриваемый промежуток времени.
Очевидно, что величина t25[j] однозначно определяется числом импульсов, пришедшим с датчика 20, то есть углом поворота вала двигателя 1. Среднее значение частоты, снимаемой с делителя 26
С учетом (1) получаем, что
где p* = p/N26 - эквивалентное число меток измерителя скорости.
Уменьшение выходной частоты делителя 26 по сравнению с частотой f19 на первом входе частотно-фазового дискриминатора 3 изменяет взаимное фазовое положение импульсов этих сигналов. При этом увеличивается длительность импульса широтно-импульсного сигнала на его втором выходе на ΔT[i] Величина этого приращения ΔT[i] находится из следующих соображений. Фазовое рассогласование импульсов частотно-фазового дискриминатора 3 на рассматриваемом (i - t[i]) интервале определяется как
t[i] = t[i-1]-1]+T26-T19, (14)
где t[i-1] - величина фазового рассогласования импульсов управления частотно-фазовым дискриминатором 3 на (i-1) интервале.
Поэтому приращение ΔT[i] за один период выходного сигнала делителя 26 t[i-1] может быть найдено как
ΔT[i] = t[i]-t[i-l] = T26-T19. (15)
Так как в квазиустановившемся режиме период частоты на первом входе частотно-фазового дискриминатора 3 постоянен и T19 = T26, то можно считать, что величина ΔT[i] определяется только изменением периода частоты второго делителя. В общем случае за период частоты f26 приходит несколько импульсов датчика 20, число которых k определяется как
где ϕ1= ∫Ωdt - угол поворота вала двигателя 1 за рассматриваемый промежуток времени.
Период T26 частоты обратной связи можно определить как
T26 = (k•2T23(N26-k)T23) = T23(N26+k),
а так как период частоты делителя 19 в квазиустановившемся режиме равен (T23N26), то  может быть найдено из следующего соотношения
может быть найдено из следующего соотношения
Задержка изменения положения импульса делителя 26 зависит от состояния этого делителя в момент формирования импульса с датчика скорости 20. Очевидно, что она не может превышать длительности периода выходной частоты делителя 26, то есть величины следующего отношения (N26/f23).
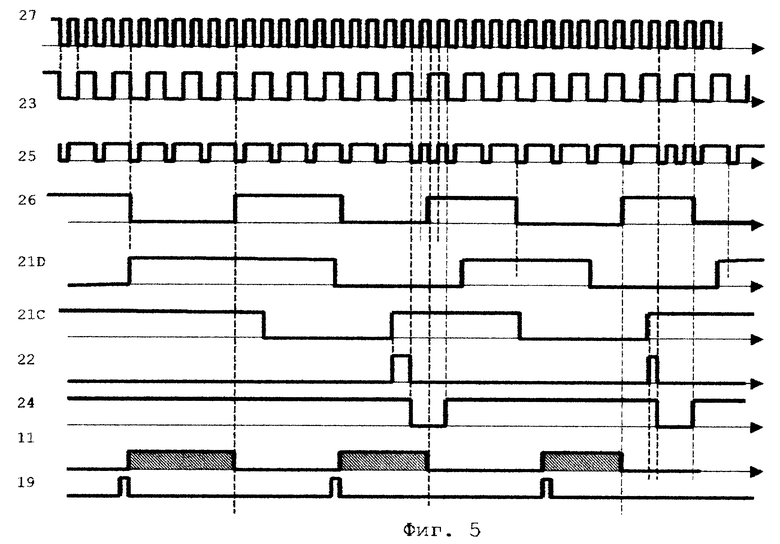
При вращении вала двигателя 1 против часовой стрелки (фиг. 5) на первом выходе дискриминатора 3 и связанном с ним выходе триггера 11 появляется широтно-импульсный сигнал. Фронт этого сигнала определяется импульсом с делителя 19, а спад - импульсом с делителя 26. На выходе триггера 21 появляется сигнал низкого уровня. Фронт импульса со второго выхода фотоимпульсного датчика 20 устанавливает высокий уровень сигнала на выходе триггера 22. Ближайший к этому моменту времени фронт импульса с триггера 23, согласно (3), сбрасывает триггер 24, который возвращает триггер 22 в исходное состояние. При существующей комбинации сигналов на адресных входах мультиплексора 25 (A1=1 и A2=1) сигнал на его выходе обусловливается только U25 так как DI3=0. Такое состояние сохраняется в течение одного периода выходного сигнала триггера 23. В момент его окончания на выходе триггера 24 устанавливается сигнал высокого уровня. Так как в течение периода выходного сигнала фотоимпульсного датчика 20 происходит добавление одного импульса к исходной последовательности импульсов мультиплексора 25, то общее их число
Среднее значение частоты выходного сигнала мультиплексора 25 находится по следующему выражению:
f25 = f23+f20 (20)
Текущее положение импульсов частоты f25 может быть определено как
t25[j] = (j-N20)•T23 (21)
Очевидно, что величина T25[j] однозначно определяется числом импульсов датчика 20, то есть углом поворота вала двигателя 1. Среднее значение частоты, снимаемой с делителя 26
Увеличение частоты делителя 26 по сравнению с частотой f19 на первом входе частотно-фазового дискриминатора 3 изменяет фазовое положение этих сигналов. При этом увеличивается длительность импульса широтно-импульсного сигнала на его первом выходе. Так как период частоты обратной связи Т26
а с учетом величины периода частоты f19 в квазиустановившемся режиме значение ΔT[i] можно определить по (18).
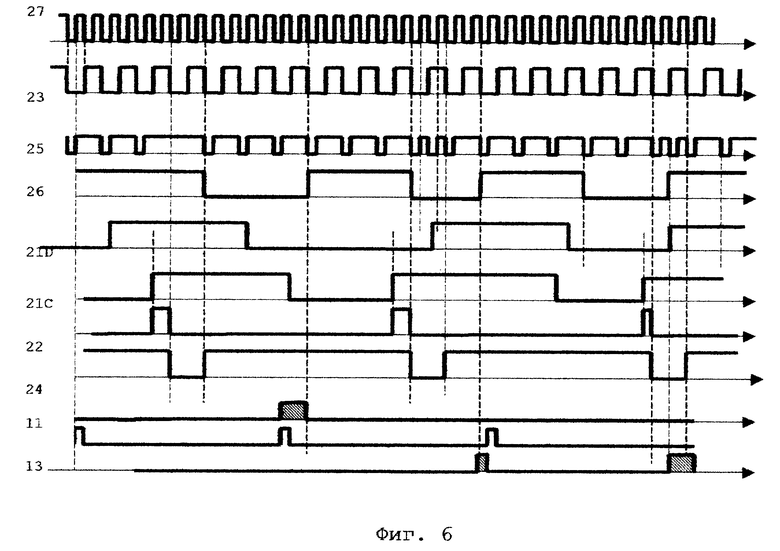
На фиг. 6 представлена работа устройства при изменении направления вращения вала двигателя 1.
Из (18) следует, что величина изменения фазового положения импульса обратной связи f26 относительно импульса частоты задания f19 пропорциональна углу поворота вала двигателя, то есть интегралу от угловой скорости вала двигателя 1. Поэтому при использовании измерителя частоты 2 сохраняются все достоинства фазовых систем в отношении точности стабилизации частоты вращения двигателя 1.
Величина погрешности измерения положения вала двигателя 1 и его угловой скорости может быть оценена, исходя из следующих соображений. Погрешность определения положения импульса делителя 26 возникает из-за дискретности его формирования. Ее величина определяется разностью периода этой частоты и его идеального значения, определяемого из (12). Разность этих величин находится из следующего выражения
где k - целое число импульсов датчика 20 за время Т26.
Величина δT, отнесенная к периоду идеального значения преобразованной частоты фотоимпульсного датчика, соответствующей определенному значению угла поворота вала двигателя 1, является относительной погрешностью δϕ преобразования его текущего положения, которая находится по выражению вида
Максимальное значение δϕ, найденное по (25), не превышает N26 -1.
Для фотоимпульсных датчиков скорость вращения оценивается по интервалу времени поворота вала на определенное число меток датчика. В предлагаемой схеме погрешность измерения этого интервала не превышает одной дискреты его заполнения, то есть частоты f23. При многократных измерениях точки начала и конца счета случайным образом размещаются в пределах первого и последнего периода частоты f23, следовательно, погрешность квантования будет иметь случайный характер. При равновероятном размещении начала и конца измерительного интервала в пределах первого и последнего кванта результирующая погрешность будет иметь треугольный закон распределения вероятности с предельными значениями ±T23 [3]. Дисперсия погрешности квантования в этом случае будет равна T23 2/6.
Относительная среднеквадратическая погрешность во многом зависит от угла поворота вала двигателя 1, на котором производится измерение времени движения. В самом общем случае величина угла поворота определяется количеством импульсов датчика 20 за период частоты f26. Тогда относительная среднеквадратическая погрешность может быть записана в виде
С учетом (2) величина погрешности измерения скорости двигателя 1 может быть рассчитана по выражению
Анализ (27) показал, что имеется максимум среднеквадратического значения погрешности измерителя 2, который возникает при такой скорости вала двигателя 1, при которой в течение каждого периода частоты f26 появляется один импульс с датчика 20. В таком случае имеем
Из вышеприведенного равенства следует, что значение скорости вала двигателя 1, при которой среднеквадратическая погрешность ее измерения максимальна, будет определяться формулой
С учетом (28) максимальное значение относительной среднеквадратической погрешности находится из выражения
Из (29) следует, что максимальное значение относительной среднеквадратической погрешности зависит от коэффициента пересчета делителя 26. При его величине, большей чем тысяча, будет достигаться погрешность измерения скорости не более 0.02%.
Из приведенных выше соотношений следует, что использование предлагаемого измерителя скорости 2 обеспечивает, во-первых, увеличение частоты сигнала управления частотно-фазовым дискриминатором 3, а во-вторых, сохраняется зависимость между положением импульса обратной связи и вала двигателя 1. Последнее позволяет использовать предлагаемый измеритель 2 в фазовых системах стабилизации скорости, обладающих более высокими точностными характеристиками по сравнению с электроприводами, базирующимися на измерении периода выходного сигнала фотоимпульсного датчика [6].
Уровень угловой скорости не зависит от напряжения питающей сети и колебаний температуры, а определяется только нестабильностью генератора 4 задающей частоты, которая при использовании кварцевых резонаторов не превышает 10-5%.
Электропривод прост по конструкции и не содержит аналоговых и настраиваемых элементов.
Источники информации
1. Файнштейн В.Г. Микропроцессорные системы управления электроприводами. -М.: Энергоатомиздат, 1986.
2. Схемотехника цифровых преобразователей перемещения: Справочное пособие/В. Г. Домрачев, В. Р. Матвеевский, Ю.С. Смирнов. -М.: Энергоатомиздат, 1987. -392 с.
3. Андрущук В.В. Цифровые системы измерения параметров движения механизмов в машиностроении. -СПб.: Политехника, 1992. -237 с.
4. А.с СССР 1411910 кл. H 02 P 5/06, 1988.
5. Пухальский Г.И., Новосельцева Т.Я. Проектирование дискретных устройств на интегральных микросхемах. -М.: Радио и связь, 1990.
6. Трахтенберг Р. М. Импульсные астатические системы электропривода с дискретным управлением. -М.: Энергоиздат, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2260897C2 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| ЭЛЕКТРОПРИВОД | 1996 |
|
RU2127940C1 |
| ЭЛЕКТРОПРИВОД | 2005 |
|
RU2302073C1 |
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130688C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2138903C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2003 |
|
RU2258297C2 |
| Электропривод постоянного тока | 1991 |
|
SU1786630A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| Электропривод постоянного тока | 1991 |
|
SU1775833A1 |
Изобретение может быть использовано в системах стабилизации угловой скорости электропривода, построенных на базе контура фазовой синхронизации. Технический результат заключается в повышении точности поддержания регулируемых координат и расширении сферы применения электропривода. В электроприводе использован фотоимпульсный датчик скорости/положения вала и схема преобразования выходного сигнала датчика, которая позволяет увеличить частоту выходного сигнала датчика. 6 ил.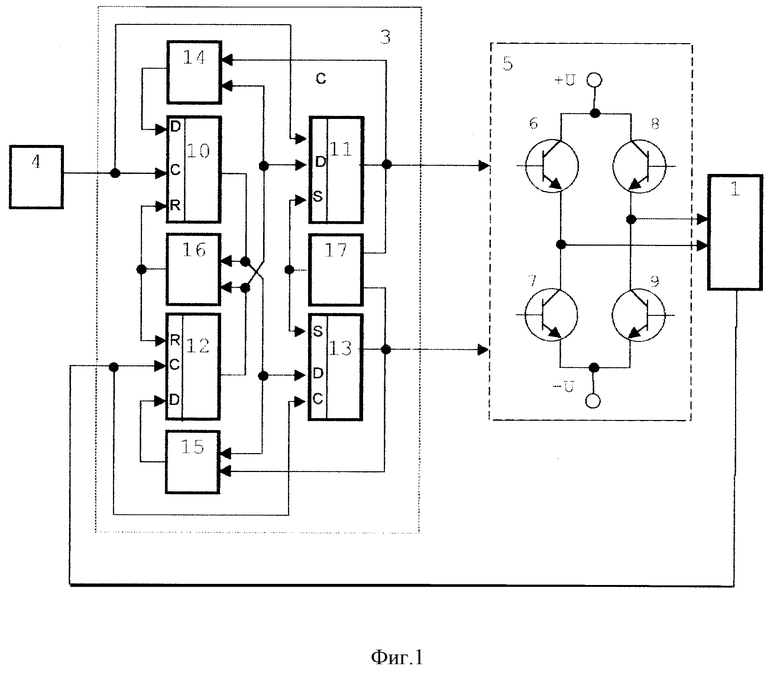
Электропривод, содержащий измеритель скорости, двигатель, подключенный к мостовому силовому преобразователю, генератор задающей частоты и частотно-фазовый дискриминатор, первый и второй выходы которого соединены с модулирующим и реверсирующим входами силового преобразователя, а частотно-фазовый дискриминатор содержит четыре триггера, два элемента И и два элемента ИЛИ, причем счетные входы первого и второго триггеров подключены к первому входу частотно-фазового дискриминатора, второй вход которого связан со счетным входами третьего и четвертого триггеров, информационные входы первого и третьего триггеров связаны с выходами первого и второго элементов ИЛИ соответственно, а входы сброса первого и третьего триггеров соединены с выходом первого элемента И, второй вход которого связан с выходом третьего триггера, информационным входом второго триггера и вторым входом первого элемента ИЛИ, первый вход которого соединен с первым выходом частотно-фазового дискриминатора, выходом второго триггера и первым входом второго элемента И, второй вход которого связан со вторым выходом частотно-фазового дискриминатора, выходом четвертого триггера и вторым входом второго элемента ИЛИ, первый вход которого соединен с первым входом первого элемента И, выходом первого триггера и информационным входом четвертого триггера, вход сброса которого соединен с входом сброса второго триггера и выходом второго элемента И, отличающийся тем, что в устройство введен первый делитель частоты, включенный между генератором задающей частоты и первым входом частотно-фазового дискриминатора, а измеритель скорости содержит фотоимпульсный датчик скорости, второй и третий делители, четыре триггера и мультиплексор, причем выход последнего через второй делитель частоты соединен со вторым входом частотно-фазового дискриминатора, а второй адресный вход мультиплексора соединен с выходом пятого триггера, информационный и счетный входы которого соединены с первым и вторым выходами фотоимпульсного датчика скорости, в то время как первый адресный вход мультиплексора подключен к входу сброса шестого триггера и выходу седьмого триггера, информационный вход которого соединен с выходом шестого триггера, связанного счетным входом со вторым выходом фотоимпульсного датчика скорости, а счетный вход седьмого триггера соединен со вторым и четвертым информационным входами мультиплексора и выходом восьмого триггера, вход которого подключен к выходу третьего делителя частоты и входу управления мультиплексора, на первый информационный вход которого подан сигнал логического нуля, а на третий - логической единицы, а выход генератора задающей частоты соединен со входом третьего делителя частоты.
| Электропривод постоянного тока | 1987 |
|
SU1411910A1 |
| SU 1488948 A1, 23.06.1989 | |||
| Электропривод постоянного тока | 1985 |
|
SU1267575A1 |
| Электропривод постоянного тока | 1986 |
|
SU1376202A1 |
| Световое перо | 1982 |
|
SU1084840A1 |

