Изобретение относится к электротехнике и может быть использовано в системах управления точными электроприводами, предназначенными для регулирования скорости двигателя постоянного тока.
Известен ряд электроприводов, построенных на базе контура фазовой синхронизации, в которых все операции по измерению фазового рассогласования и управлению двигателем выполняются на аппаратном уровне [1]. Такие электроприводы обеспечивают высокие точностные характеристики, однако требуют применения большого числа дискретных элементов. При применении микроконтроллеров обычно используются преобразователи частоты или периода измеренного сигнала датчика скорости в цифровую форму, что ведет к появлению систематических погрешностей и использованию многоразрядных преобразователей [2].
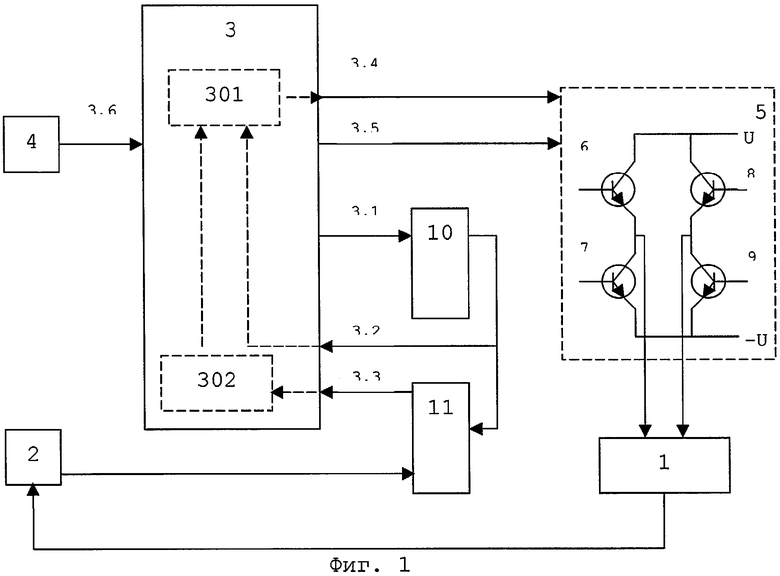
Наиболее близким к предлагаемому устройству является электропривод постоянного тока [3], функциональная схема которого представлена на фиг.1.
Электропривод содержит двигатель 1 постоянного тока, на валу которого установлен датчик 2 скорости. Для управления скоростью двигателя 1 используется микроконтроллер 3, к третьему (3.6) входу которого подключен генератор 4 задающей частоты. Второй (3.4) и третий (3.5) выходы микроконтроллера 3 соединены с первым и вторым силового преобразователя 5, выполненного на транзисторах 6-9 по мостовой схеме, в диагональ которого включена якорная обмотка двигателя 1. Первый выход микроконтроллера - (3.1), являющийся выходом строба приема адреса, связан с делителем частоты 10, выход которого подключен ко второму входу триггерной схемы 11 и второму входу микроконтроллера (3.2).По этому входу производится управление внешним прерыванием работы микроконтроллера 3. Выход датчика 2 скорости связан с первым входом триггерной схемы 11, выход которой подключен к первому входу (3.3) микроконтроллера 3. Таймеры 302 и 301, интегрированные в кристалл микроконтроллера 3, переключаются с частотой следования импульсов строба приема адреса. Запуск таймера 301 осуществляется программными средствами при спаде сигнала на втором 3.2 входе микроконтроллера 3. Управление процессом подсчета импульсов первым таймером 302 производится сигналом на первом входе микроконтроллера 3. Выход таймера 301 с помощью программных средств управляет величиной сигнала на втором выходе (3.4) микроконтроллера 3.
Использование для измерения величины фазового рассогласования встроенного в микроконтроллер таймера существенно ограничивает разрешающую способность измерительного преобразователя. Так для большинства микроконтроллеров семейства MCS51 [4] период дискретизации временного интервала не может быть меньше 0.5 мкс, что не может считаться достаточным для высокоточных систем электропривода.
Технический результат предлагаемого изобретения заключается в увеличении точности стабилизации скорости приводного двигателя и расширении функциональных возможностей устройства. Для реализации этого в известное устройство [3] введен запоминающий регистр, а делитель частоты подключен к выходу генератора задающей частоты. При этом выходы делителя частоты соединены с одноименными входами запоминающего регистра. Выходы запоминающего регистра через шину управления соединены с микроконтроллером. Выход генератора задающей частоты соединен со счетным входом делителя частоты и первым входом микроконтроллера. Второй вход микроконтроллера, являющийся входом управления прерыванием, соединен с выходом датчика скорости и стробирующим входом запоминающего регистра. В состав микроконтроллера входят два таймера. Первый таймер задает частоту работы импульсного силового преобразователя. Второй таймер управляет длительностью широтно-импульсного сигнала. Оба таймера управляются сигналом задающего генератора. Первый и второй выходы микроконтроллера соединены с входами транзисторного силового преобразователя, выполненного по мостовой схеме. В диагональ моста включена якорная обмотка двигателя, на валу которого расположен датчик скорости. В качестве датчика скорости возможно применение любого измерительного преобразователя перемещения с частотным выходным сигналом, как фотоэлектрического, так и электромашинного типа. Запоминающий регистр обеспечивает сохранение маски делителя при изменении выходного сигнала датчика скорости. Этим обеспечивается измерение фазового рассогласования частоты сигнала задания, определяемого емкостью делителя частоты, и сигнала обратной связи по положению вала, определяемого датчиком скорости. Использование двух таймеров для раздельного формирования параметров широтно-импульсного сигнала управления силовым преобразователем позволяет повысить свойства адаптации устройства к различным типам приводных двигателей. Микроконтроллер обеспечивает прием величины фазового рассогласования с запоминающего регистра, его обработку в соответствии с принятым алгоритмом управления, и передачу на второй таймер для формирования длительности широтно-импульсного сигнала управления силовым преобразователем. Кроме того, микроконтроллер обеспечивает защиту от опрокидывания регулирования в процессе пуска и торможения двигателя. В зависимости от принятого алгоритма управления такой электропривод может работать в режиме стабилизации скорости или в режиме следящего электропривода. В качестве микроконтроллера может быть использован любой тип из семейства MCS51.
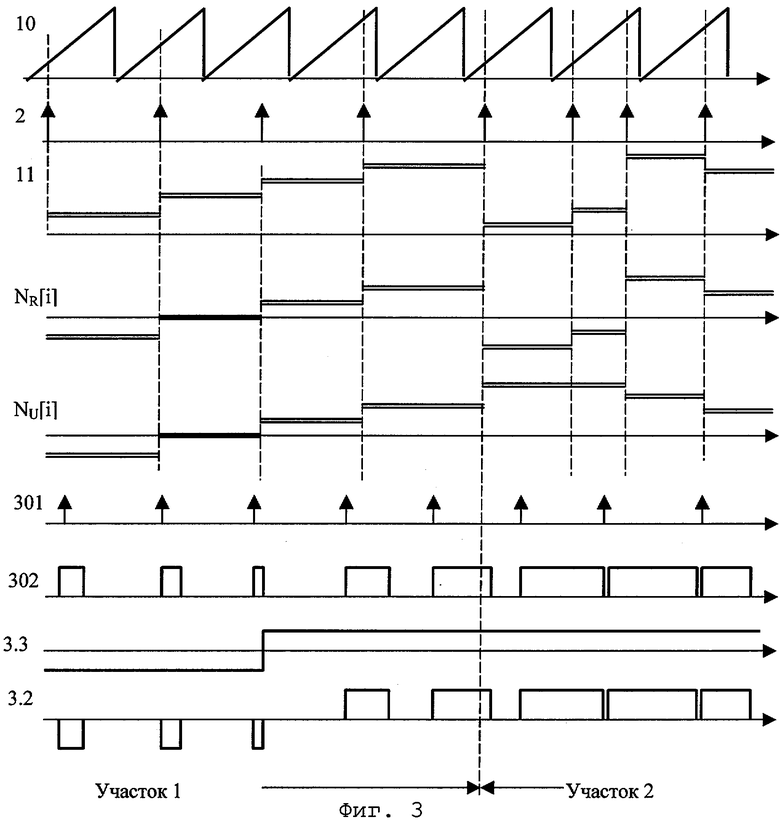
На фиг.2 приведена функциональная схема электропривода. Пунктиром обозначены связи, реализованные программным способом. На фиг.3 приведены временные диаграммы, поясняющие его работу. Цифрами обозначены выходы соответствующих элементов устройства.
Электропривод содержит двигатель 1 постоянного тока, на валу которого установлен датчик 2 скорости. Для управления скоростью двигателя 1 используется микроконтроллер 3, к первому (3.1) входу которого подключен генератор 4 задающей частоты. Второй (3.2) и третий (3.3) выходы микроконтроллера 3 соединены с первым и вторым входами силового преобразователя 5, выполненного по мостовой схеме на транзисторах 6-9. В диагональ мостовой схемы включена якорная обмотка двигателя 1. Выход генератора 4 задающей частоты соединен со счетным входом делителя частоты 10. Выход датчика 2 скорости подключен к стробирующему входу запоминающего регистра 11 и связан со вторым входом микроконтроллера - (3.4), по которому производится управление внешним прерыванием работы микроконтроллера 3. Выходы отдельных разрядов делителя 10 соединены с одноименными информационными входами запоминающего регистра 11. Его выходы связаны с внутренней шиной 303 управления микроконтроллером, которая подключена к третьему (3.5) входу микроконтроллера 3. Шина управления 303 обеспечивает передачу информации между отдельными элементами микроконтроллера 3. Таймеры 302 и 301, интегрированные в кристалл микроконтроллера 3, обеспечивают формирование широтно-импульсного сигнала, частота которого определяется таймером 301, а длительность - таймером 302. Таймер 301 работает на тактовой частоте микроконтроллера 3. При переполнении таймера вырабатывается сигнал прерывания, по которому в таймер 302 заносится вычисленное значение длительности широтно-импульсного сигнала управления двигателем и разрешается его счет. Выход таймера 302 с помощью программных средств управляет величиной сигнала на втором (3.2) и третьем (3.3) выходах микроконтроллера 3. Электропривод работает следующим образом.
В основу электропривода положен принцип фазовой синхронизации частотных сигналов задания и обратной связи, обеспечивающий малую погрешность поддержания скорости и высокую стабильность характеристик работы устройства. Для этого в электроприводе используется высокостабильный генератор 4 задающей частоты, подключенный к первому входу микроконтроллера 3 и генерирующий импульсы с частотой следования f4.
Делитель частоты 10 с коэффициентом пересчета К10 предназначен для задания величины скорости двигателя 1. Частота его выходного сигнала определяется как

При этом на его выходе появляется линейно нарастающий сигнал N10 [i]. На выходе датчика 2 скорости формируются прямоугольные импульсы частоты f2 с уровнями сигналов, необходимыми для работы используемых в устройстве логических элементов. Частота выходного сигнала датчика 2 скорости Ω определяется как
где z - число меток датчика 2 скорости.
Рассмотрим условия работы устройства с оптическим датчиком скорости. В установившемся режиме работы частоты сигналов с выхода делителя 10 частоты - f10 и частоты f2 датчика 2 скорости равны. Следовательно, уровень скорости двигателя 1 определяется как
В этом случае, показанном на фиг.3 (участок 1), каждый фронт импульса с делителя 10 частоты переносит состояние делителя 10 в запоминающий регистр11. Число, занесенное в запоминающий регистр 11 N11 [i], определяется как
где T2[k] и T10[k] - текущее значение периодов сигнала с датчика 2 скорости и делителя 10 частоты;
Т4 - период частоты генератора 4 задающей частоты.
Значение N11[i] является цифровым эквивалентом разности фаз частотных сигналов задания и обратной связи. Таким образом, представленная система является аналогом контура фазовой синхронизации, в котором функции фазового дискриминатора выполняет запоминающий регистр 11. Микроконтроллер 3 выполняет функции регулятора, осуществляя обработку сигнала фазового рассогласования в соответствии с выбранным законом управления. Вычисленная ошибка управления, как показано в [1], соответствует интегралу от ошибки стабилизации скорости двигателя 1. Поэтому в устройстве обеспечивается идеальный астатизм по скорости двигателя 1, а погрешность стабилизации ее среднего значения стремится к нулю.
Импульс записи в запоминающий регистр 11 инициирует программу обработки прерывания микроконтроллера 3. Эта программа производит считывание данных с запоминающего регистра через шину управления 303 в микроконтроллер 3, где осуществляется ее дальнейшая обработка. При этом вычисляется величина сигнала ошибки NR[i], необходимого для работы программного регулятора, по выражению:

где К11 - максимальная емкость запоминающего регистра 11.
Применение выражения (5) для вычисления длительности широтно-импульсного сигнала управления силовым преобразователем 5 позволяет изменять знак напряжения на якорной обмотке двигателя 1, что увеличивает быстродействие устройства.
Для получения сигнала управления двигателем 1 NU [i] используется алгоритм вида:

где Кр, Kg, Ki - коэффициенты передачи по производной величине и интегралу сигнала ошибки устройства.
После расчета переменной, управляющей работой двигателя 1, ее модуль заносится во второй таймер 302 микроконтроллера 3, запуск которого производится при переполнении первого таймера 301 микроконтроллера 3. Это осуществляется специальной программой обработки прерывания, запускаемой таймером 301, которая имеет более высокий уровень по сравнению с программой обработки прерывания, запускаемой сигналом с датчика 2 скорости двигателя 1. Программа обработки прерывания от таймера 301 также заносит в этот таймер некоторое число КT, значение которого определяет частоту коммутации транзисторов 6-9 силового преобразователя 5. Значение этой частоты fK определяется как
Это позволяет программно задавать частоту работы транзисторов силового преобразователя 5, что расширяет возможности адаптации электропривода к параметрам конкретного используемого двигателя 1. После переполнения таймера 301 на втором 3.2 выходе микроконтроллера 3 устанавливается сигнал высокого уровня. Сигнал, соответствующий знаку NU[i] (низкого уровня при NU[i]<0 или высокого уровня при NU[i]>0), поступает на третий выход 3.3 микроконтроллера 3, соединенный со вторым выходом силового преобразователя 5. Комбинация значений выходных сигналов на втором и третьем выходах микроконтроллера 3 приводит к появлению напряжения на якорной обмотке двигателя 1, то есть к увеличению его скорости. При достижении нулевого значения второго таймера 302 на втором выходе 3.2 микроконтроллера 3 программными средствами устанавливается сигнал низкого уровня, который переводит двигатель 1 в режим торможения. Таким образом, при совместной работе таймера 302 с первым и вторым выходами микроконтроллера 3 достигается формирование широтно-импульсного сигнала управления силовым преобразователем 5.
При уменьшении скорости Ω двигателя 1 уменьшается частота сигнала с выхода датчика 2 скорости. Это приводит к смещению положения импульса этого сигнала относительно импульсов с делителя 10 частоты. Это эквивалентно увеличению кода этого делителя в момент появления импульса с датчика 2 скорости. Следовательно, увеличивается и число, записываемое в запоминающий регистр11. Это ведет к росту длительности сигнала NU[i], поступающего на двигатель 1 с силового преобразователя 5. Поэтому средняя величина напряжения на якорной обмотке двигателя 1 будет возрастать, а следовательно, скорость двигателя 1 будет стремиться восстановить свое первоначальное значение.
В процессе формирования сигнала, управляющего работой двигателя 1, анализируется разность текущего NR[i] и предшествующего NR[i-1] значений сигнала ошибки. Это необходимо для выявления нарушения последовательности чередования импульсов сигналов задания и обратной связи, что, как известно [1], приводит к опрокидыванию регулирования скорости двигателя 1.
При значительном отклонении скорости Ω двигателя 1 от заданного значения (фиг.3, участок 2) нарушается последовательность чередования импульсов с делителя частоты 10 и датчика 2 скорости. При возникновении такой ситуации резко меняется величина и знак фазового рассогласования сравниваемых частот, а следовательно, и записываемого в запоминающий регистр 11 числа NR[i]. Как только разность считываемых с запоминающего регистра 11 чисел NR[i-1] и NR[i] на соседних периодах сигнала f10 делителя частоты 10 станет больше 0.5К10, микроконтроллер 3 заносит в таймер 302 значение, равное коэффициенту пересчета таймера 301, то есть величину (65536-Кт). Это соответствует максимальному напряжению, подаваемому с силового преобразователя 5 на двигатель 1. Такое состояние сохраняется до тех пор, пока модуль разности сравниваемых чисел, считываемых с запоминающего регистра 11, не станет большим 0.5К10. При этом восстанавливается связь между считываемыми с запоминающего регистра 11 данными и длительностью широтно-импульсного сигнала, поступающего с выхода таймера 302 на вход силового преобразователя 5. Такой алгоритм работы микроконтроллера по анализу двух соседних значений величин фазовых рассогласований частотных сигналов задания и обратной связи, обеспечивает ограничение длительности широтно-импульсного сигнала управления силовым преобразователем 5 при значительных отклонениях скорости двигателя 1 от задаваемого значения. Это защищает систему от опрокидывания регулирования при нарушении последовательности чередования импульсов входных частот, чем достигается эффект насыщения, аналогичный режиму, возникающему в системах электропривода с аналоговым и цифровым управлением при больших отклонениях.
При увеличении скорости Ω процессы протекают аналогичным образом, за исключением того, что при росте скорости величина числа, записываемого в регистр 11 с делителя 10 частоты уменьшается.
В предлагаемой схеме погрешность измерения этого интервала не превышает одной дискреты его заполнения, то есть периода Т4 сигнала генератора 4 задающей частоты. При многократных измерениях точки начала и конца счета случайным образом размещаются в пределах первого и последнего периода частоты f4, следовательно, погрешность квантования будет иметь случайный характер. При равновероятном размещении начала и конца измерительного интервала в пределах первого и последнего кванта результирующая погрешность будет иметь треугольный закон распределения вероятности с предельными значениями ±Т4 [5]. Дисперсия погрешности квантования в этом случае будет равна Т4 2/6.
Среднеквадратическая погрешность измерения момента появления импульса с датчика 2 скорости определяется как
С учетом того, что в установившемся режиме за время одного периода сигнала с датчика 2 скорости угол его поворота равен его разрешающей способности, то есть 2π/z, погрешность измерения γϕ положения вала может быть рассчитана как

Погрешность измерения скорости вращения вала двигателя 1 определяется как
В установившемся режиме работы электропривода период сигнала датчика 2 скорости равен периоду частоты выходного сигнала делителя 10 частоты. При достаточно большой емкости делителя 10 частоты среднеквадратическая погрешность γт≪Т2. Поэтому среднеквадратическая погрешность измерения скорости двигателя 1 может быть рассчитана по выражению
Из выражений (9) и (11) следует, что погрешность стабилизации скорости определяется частотой генератора 4 задающей частоты и емкостью делителя 10 частоты.
Для выбранного прототипа [2] среднеквадратические погрешности измерения момента появления импульса с датчика 2 скорости определяется как
Очевидно, что для одинаковых режимов работы прототипа и предлагаемого электропривода, среднеквадратические погрешности измерения положения вала двигателя 1 и его скорости в предлагаемом устройстве в 12 раз меньше, чем в выбранном электроприводе постоянного тока [1].
Кроме того, в предлагаемом устройстве частота опроса информации в 2 раза выше по сравнению с прототипом, что, как известно, повышает качество управления в статических и динамических режимах работы электропривода. Это существенно расширяет сферу его применения.
Таким образом, предлагаемое устройство позволяет существенно уменьшить погрешность преобразования отклонения положения вала от заданного значения в цифровую форму представления, что позволяет существенно уменьшить неравномерность движения вала, стабильность частоты вращения которого определяется характеристиками генератора 4 задающей частоты. Использование двух коммутируемых программно таймеров микроконтроллера позволяет оперативно изменять частоту широтно-импульсного сигнала управления силовым преобразователем 5, что повышает возможности адаптации устройства к разным типам приводных двигателей 1. Электропривод конструктивно прост и не содержит элементов, которые требуют настройки при изготовлении и в процессе эксплуатации.
Источники информации
1. Трахтенберг P.M. Импульсные астатические системы электропривода с дискретным управлением. - М.: Энергоатомиздат, 1982.
2. Патент US № 4638225, Н 02 Р 5/06. Methods and apparatus therefor in motor speed control. 1987.
3. Патент на изобретение № 2138903, Н 02 Р 5/06, опубл. в БИ № 27, 1999.
4. Однокристальные микроЭВМ. - М.: МИКАП, 1994.
5. Андрущук В.В. Цифровые системы измерения параметров движения механизмов в машиностроении. - СПб.: Политехника, 1992. - 237 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2138903C1 |
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130688C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2260897C2 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2161365C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| ЭЛЕКТРОПРИВОД | 1996 |
|
RU2127940C1 |
| Электропривод постоянного тока | 1991 |
|
SU1786630A1 |
| ЭЛЕКТРОПРИВОД | 2005 |
|
RU2302073C1 |
| Электропривод постоянного тока | 1987 |
|
SU1411910A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
Изобретение относится к электротехнике и может быть использовано в системах стабилизации скорости и положения вала двигателя постоянного тока. Технический результат заключается в повышении точности стабилизации скорости и текущего положения вала двигателя за счет уменьшения погрешности времяимпульсного преобразования. В электропривод постоянного тока введен запоминающий регистр, выходы которого через шину управления соединены с микроконтроллером, вход управления прерыванием которого связан с выходом датчика скорости и стробирующим входом запоминающего регистра. Информационные входы этого регистра соединены с соответствующими выходами делителя частоты, счетный вход которого подключен к генератору задающей частоты. Программные средства микроконтроллера в соответствии с выбранным алгоритмом управления обеспечивает регулирование частоты вращения или положение вала двигателя, формирование закона переключения транзисторов силового преобразователя и логическую защиту от опрокидывания регулирования. 3 ил.
Электропривод, содержащий генератор задающей частоты, выход которого связан с первым входом микроконтроллера, обеспечивающего расчет длительности широтно-импульсного сигнала управления двигателем по выбранному закону управления и защиту от опрокидывания регулирования, делитель частоты и частотный датчик скорости, расположенный на валу двигателя, обмотка управления которого включена в диагональ транзисторного преобразователя, входы которого соединены с выходами микроконтроллера, обеспечивающего регулирование частоты вращения двигателя и получение широтно-импульсного сигнала переключения транзисторов силового преобразователя с помощью двух таймеров, встроенных в микроконтроллер, отличающийся тем, что в него введен запоминающий регистр, выходы которого связаны с внутренней шиной управления микроконтроллера, второй вход которого соединен с выходом датчика и стробирующим входом запоминающего регистра, информационные входы которого соединены с одноименными выходами делителя частоты, счетный вход которого соединен с выходом генератора задающей частоты.
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2138903C1 |
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2141164C1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2161365C1 |
| Стабилизированный электропривод | 1989 |
|
SU1624649A1 |
| Электропривод постоянного тока | 1991 |
|
SU1786630A1 |
| Световое перо | 1982 |
|
SU1084840A1 |
| US 4638225 А, 20.01.1987 | |||
| DE 4100584 А, 06.06.1991 | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Устройство для транспортировки и закладки породы в выработанное пространство | 1974 |
|
SU578475A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

