Изобретение относится к сегменту опорного элемента датчиков устройства скребкового типа, при этом опорный элемент датчиков образован сегментами и имеет полый корпус с цилиндрической огибающей поверхностью, а устройство скребкового типа перемещается по трубопроводу с целью проверки трубопроводов, для чего на опорном элементе датчиков установлены датчики, необходимые для проверки трубопроводов. Устройства скребкового типа такого рода перемещаются по трубопроводу с целью проведения измерений и неразрушающих испытаний материалов. Такие устройства обычно имеют опорный элемент датчиков, на котором установлены датчики, необходимые для проверки трубопроводов, и один или несколько дополнительных элементов, представляющих собой устройства для записи и обработки результатов измерений, а также источник электропитания.
Устройства скребкового типа применяют в магистральных трубопроводах, таких как нефтепроводы с целью обнаружения повреждений стенок тру6, таких как образовавшаяся коррозия, трещины или изъязвления. Задачей устройства скребкового типа является получение подробной информации о типе, степени и месте повреждения внутренней стенки, материалов или наружной стенки трубы. С этой целью в процессе перемещения устройства скребкового типа по трубопроводу датчики осуществляют сканирование по всей окружности внутренней стенки трубы. Обычно для перемещения устройства скребкового типа используют носитель, который движется внутри трубопровода. Для проверки трубопроводов используют датчики с различными принципами работы, такие как ультразвуковые или электромагнитные датчики. Задачей опорного элемента датчиков является направление датчиков в определенное положение на внутренней стенке трубы или на определенном расстоянии от внутренней стенки трубы.
Из уровня техники известны различные виды опорных элементов датчиков устройств скребкового типа. В известном варианте осуществления используются опорные элементы, у которых датчики расположены на сегментах, образующих отдельные сегментные кольца, расположенные позади друг друга (последовательное расположение). Сегментные кольца соединены друг с другом при помощи жесткой оси, проходящей в направлении перемещения устройства скребкового типа. Основным недостатком данной конструкции является то, что из-за наличия жесткой оси опорный элемент датчиков плохо приспособлен к изменению кривизны труб, вследствие чего такой опорный элемент датчиков имеет значительную общую длину.
Кроме того, известны опорные элементы датчиков, у которых датчики соединены с опорным элементом при помощи громоздких механических средств, таких как соединительные балки, что имеет целью обеспечить расположение отдельных датчиков преимущественно на одинаковом расстоянии от внутренней стенки трубы в процессе перемещения опорного элемента датчика по трубопроводу. Недостатком механических средств данного типа являются их частые отказы, что противоречит задаче точности измерений датчиков.
В еще одной известной конструкции использованы подвижные блоки, скошенные в продольном направлении. Датчики расположены позади каждого из подвижных блоков, за счет скоса которых обеспечивается боковое смещение датчиков и, тем самым, охват всей окружности трубы. Недостатком данной конструкции является то, что обращенные вперед боковые грани скошенных подвижных блоков, каждая из которых охватывает значительную долю окружности трубы, могут соскабливать загрязнения со стенки трубы и создавать усилия, направленные на выпрямление подвижных блоков. И то, и другое противоречит результатам проверки, поскольку, например, происходит засорение датчиков твердыми углеводородами или возникает погрешность в определении местоположения датчиков. Поскольку смещение датчиков обеспечивается за счет скоса подвижных блоков, уменьшение общей длины опорного элемента может быть достигнуто лишь за счет увеличения скоса подвижных блоков. С учетом связанных с этим неудобств невозможно применять опорный элемент датчиков с малой общей длиной и, тем самым, обеспечить соответствующую способность дугообразного перемещения.
В патенте ФРГ DE 3626646 С2 описан опорный элемент датчиков в виде манжеты. Манжета разделена на узкие параллельные сегменты, на которых расположены датчики. Если сегменты ориентированы параллельно оси устройства скребкового типа, маловероятно обеспечить взаимное перекрытие областей измерения, сканируемых датчиками, либо смещение датчиков по окружности. Таким образом, в предпочтительном варианте осуществления такого устройства скребкового типа центральные оси параллельных сегментов образуют острый угол с центральной осью трубопровода, за счет чего обеспечивается смещение датчиков по окружности таким образом, что последовательно расположенные датчики сегмента сканируют узкую полоску поверхности стенки трубы, ширина которой превышает ширину активной поверхности сканирования отдельного датчика. Недостаток данной конструкции заключается в том, что в процессе перемещения по трубопроводу на сегменты действуют выравнивающие силы, скошенные относительно направления перемещения устройства скребкового типа и выравнивающие сегменты параллельно центральной оси трубопровода. Это не только ставит под сомнение требуемую точность измерений, но также приводит к соскабливанию загрязнений или неровностей со стенки трубы и, тем самым, дополнительному влиянию на результаты измерений или повреждению устройства скребкового типа.
В патенте США US 5616854 описано устройство для испытания на пневматическую герметичность трубопроводов, в котором манжета помещена снаружи проверяемого трубопровода.
Задачей настоящего изобретения является создание на основе известного уровня техники сегмента опорного элемента датчиков описанного выше устройства скребкового типа, который в сочетании с другими аналогичными сегментами образует опорный элемент датчиков, отличающийся высокой эксплуатационной и функциональной надежностью и хорошей способностью дугообразного перемещения. Настоящее изобретение также относится к опорному элементу датчиков или устройству скребкового типа, в которых применяются такие сегменты.
Данная задача решена в настоящем изобретении за счет сегмента с признаками по п.1. предпочтительные варианты осуществления и дополнительные усовершенствования которого следуют из зависимых пунктов и описаны далее со ссылкой на приложенные чертежи.
Таким образом, сегмент по изобретению имеет по меньшей мере две пары подвижных блоков, каждая из которых состоит из двух преимущественно параллельных подвижных блоков. Пары подвижных блоков расположены позади друг друга (последовательное расположение) против направления перемещения устройства скребкового типа. Подвижные блоки совмещены в направлении перемещения устройства скребкового типа, т.е. в направлении продольной оси сегмента. Последовательно расположенные подвижные блоки упруго соединены друг с другом при помощи соединительных элементов. За счет упругого соединения подвижных блоков, выполненного, например, из упругого материала, предпочтительно, пластика или при помощи металлических пружин, подвижные блоки способны приспосабливаться к неровностям на внутренней стенке трубы, таким как впадины, за счет чего опорный элемент датчиков в целом способен компенсировать колебания диаметра проверяемого трубопровода, при этом верхняя часть подвижных блоков постоянно касается внутренней стенки трубы, а подвижные блоки направляют датчики в положение на номинальном расстоянии от стенки трубы.
Между подвижными блоками по меньшей мере одной пары подвижных блоков расположена опорная плита датчиков. Опорная плита может быть выполнена в виде отдельной детали, прикрепленной к подвижным блокам, или в виде единой детали с подвижными блоками.
Сегмент выполнен таким образом, что он может быть при помощи соединительного устройства соединен с дополнительными аналогичными сегментами, образующими полый элемент с цилиндрической огибающей поверхностью.
Сегмент по изобретению может использоваться для создания опорного элемента датчиков для устройств скребкового типа, отличающегося высокой эксплуатационной и функциональной надежностью, направляющего датчики в заданное положение относительно внутренней стенки трубы, отличающегося гибкостью, позволяющей компенсировать колебания диаметра трубопровода, за счет своей конструкции способного приспосабливаться к неровностям на внутренней стенке трубы, что уменьшает ее износ, являющегося компактным и имеющего малую общую длину, что улучшает способность дугообразного перемещения, перемещаемого устройством скребкового типа без создания поперечных или выпрямляющих сил, активно действующих на сегменты, за счет чего обеспечивается высокая точность измерений и малое истирание трубы, и благодаря своей конструкции отличающегося простотой сборки, разборки и обслуживания.
Преимущественная параллельность подвижных блоков друг другу означает, что угол между ними составляет менее 15°, предпочтительно менее 10° и особо предпочтительно менее 5°. При таком прямолинейном расположении сохраняются преимущества изобретения в том, что касается незначительного соскабливания и малой общей длины.
Согласно изобретению не требуется, чтобы подвижные блоки были скошены с целью сохранения смещения датчиков, а датчики могут быть в любом порядке и компактно установлены на опорных плитах. За этот счет сокращается общая длина, улучшается способность дугообразного перемещения и уменьшается соскабливание.
Подвижные блоки могут быть выполнены из относительно жесткого, неупругого материала, если необходимо обеспечить их высокую внутреннюю устойчивость. В этом случае упругость опорного элемента датчиков обеспечивается за счет упругих соединительных элементов между подвижными блоками и/или сегментами. В предпочтительном варианте осуществления подвижные блоки выполнены из упругого материала, предпочтительно материала, из которого выполнены соединительные элементы, в частности, если конструкция представляет собой единое целое с целью придания высокой гибкости сегментам. При необходимости подвижные блоки также могут быть снабжены усиливающими элементами, если недостаточна устойчивость, приданная им за счет соединения с опорными плитами.
В дополнительном предпочтительном варианте осуществления между подвижным блоком одного сегмента и подвижным блоком соседнего сегмента может помещаться по меньшей мере одна дополнительная опорная плита. Сегменты опорного элемента датчиков могут быть соединены при помощи опорных плит, расположенных между сегментами, за счет чего образуется опорный элемент датчиков. В другом предпочтительном варианте осуществления сегмента соединительное устройство закреплено на лицевой стороне сегмента, обращенной в направлении перемещения устройства скребкового типа. Соединительное устройство предпочтительно выполнено в виде фланца, соединяющего лицевые стороны сегментов. В еще одном предпочтительном варианте осуществления между соседними сегментами расположены С-образные рессорные листы.
Число пар подвижных блоков, каждая из которых состоит из двух подвижных блоков сегмента, предпочтительно составляет от двух до десяти, особо предпочтительно от двух до четырех. Помимо прочих факторов, их число зависит от числа опорных плит датчиков, которые необходимы для обеспечения определенной точности измерения, и от требуемой способности дугообразного перемещения опорного элемента датчиков.
В предпочтительном варианте осуществления лицевая поверхность сегмента, обращенная в направлении перемещения устройства скребкового типа, имеет конусообразную форму, например, совпадающую с конусообразным участком сегмента, за счет чего лицевая сторона цилиндрического полого тела, образованного такими сегментами, имеет участок в форме усеченного конуса. Это позволяет легко протягивать полое тело, служащее опорным элементом датчиков, через трубопровод, даже если трубопровод уменьшается в поперечном сечении из-за неровностей на стенках трубы, таких как впадины.
Последовательно расположенные пары подвижных блоков предпочтительно соединены друг с другом при помощи упругих промежуточных сегментов, которые предпочтительно расположены под углом к подвижным блокам и предпочтительно имеют круглую, овальную, прямоугольную или трапецеидальную форму в поперечном сечении. Площадь поперечного сечения промежуточных сегментов может уступать площади поперечного сечения подвижных блоков, за счет чего повышается эластичность сегментов. Промежуточные сегменты могут быть расположены параллельно или сходиться либо расходиться относительно друг друга, за счет чего промежуточные сегменты различных пар подвижных блоков сегмента могут отличаться друг от друга соответствующим расположением.
За счет упругих промежуточных сегментов положение последовательно расположенных пар подвижных блоков максимально приближено к параллельности оси трубы, а подвижные блоки способны приспосабливаться к колебаниям диаметра и неровностям трубы. Кроме того, применение таких упругих промежуточных сегментов и выбор малой общей длины опорного элемента датчиков, состоящего из сегментов по изобретению, обеспечивает существенное улучшение способности дугообразного перемещения опорного элемента датчиков, за счет чего он также способен перемещаться через участки трубопроводов со значительной кривизной и малым радиусом кривизны труб.
Проиллюстрированные ниже признаки могут предпочтительно служить для повышения устойчивости опорного элемента датчиков, повышения устойчивости сегментов и опорного элемента датчиков к тяговому усилию, например, для предотвращения отсоединения или повреждения сегментов под воздействием скачкообразных сил, возникающих при прохождении через выходы, выступающие внутрь трубы, и для повышения управляемости датчиков в процессе их перемещения через трубу.
В соответствии с первым предпочтительным признаком сегмент имеет поперечное ребро, соединяющее подвижные блоки пары подвижных блоков и расположенное между по меньшей мере одной парой подвижных блоков на лицевой стороне сегмента относительно направления перемещения устройства скребкового типа. В соответствии с другим предпочтительным признаком сегмент имеет соединительный элемент, соединяющий опорную плиту и подвижный блок и расположенный между опорной плитой, установленной между парой подвижных блоков, и подвижным блоком задней (относительно направления движения) пары подвижных блоков. Предпочтительно, соединительный элемент проходит вдоль продольной оси подвижного блока, а соединительные элементы, расположенные между опорной плитой и подвижным блоком, прикреплены к опорной плите при помощи рукавов.
В соответствии с еще одним предпочтительным признаком сегмент имеет поперечное ребро, за счет которого он соединен с соседним сегментом. Кроме того, поперечное ребро может соединяться с соответствующим поперечным ребром соседнего сегмента таким образом, что оба поперечных ребра дополняют друг друга, образуя поперечное ребро, соединяющее соседние сегменты.
При этом промежуточный сегмент, служащий для соединения двух последовательных подвижных блоков, может быть соединен с поперечным ребром сегмента при помощи рукава. Рукав образует гибкое соединение, противодействующее тяговому усилию.
Длина подвижных блоков предпочтительно составляет от 5 см до 300 см, особо предпочтительно от 10 см до 50 см. Она зависит от предпочтительной длины прикрепляемых опорных плит и требуемой способности дугообразного перемещения подвижных блоков и опорного элемента датчиков. С увеличением длины подвижных блоков их способность дугообразного перемещения улучшается, однако при этом уменьшается длина опорных плит, которые могут быть помещены между подвижными блоками и, следовательно, число датчиков, которые могут быть установлены на опорной плите.
Длина промежуточных сегментов, соединяющих друг с другом последовательно расположенные подвижные блоки, предпочтительно составляет от 2 см до 50 см. В предпочтительном варианте осуществления изобретения все подвижные блоки имеют одинаковую длину. Все промежуточные сегменты, соединяющие соседние подвижные блоки, также могут иметь одинаковую длину. За этот счет не только уменьшается стоимость производства, но также обеспечиваются одинаковые механические свойства сегмента по всей длине.
Отношение длины промежуточных сегментов к длине соседних подвижных блоков, соединенных промежуточными сегментами, предпочтительно находится в пределах от 1/10 до 5, особо предпочтительно от 2/10 до 1. В этой связи следует принять во внимание, что, с одной стороны, общая длина сегмента или опорного элемента датчиков уменьшается при малой длине промежуточных сегментов, однако, с другой стороны, более длинные промежуточные сегменты способствуют повышению гибкости сегмента или опорного элемента датчиков, при этом оба фактора являются благоприятными с точки зрения способности дугообразного перемещения.
Для повышения устойчивости подвижных блоков им может быть придана преимущественно трапецеидальная форма, форма параллелограмма или прямоугольника в поперечном сечении. На устойчивость также влияет соотношение высоты подвижного блока, т.е. его размера в радиальном направлении относительно опорного элемента датчиков, образованного сегментами по изобретению, и ширины подвижного блока, т.е. его размера в направлении окружности опорного элемента датчиков, при этом предпочтительное соотношение находится в пределах от 1/3 до 3.
Верхняя сторона подвижных блоков может быть плоской или, предпочтительно, изогнутой в направлении, поперечном их продольной оси, что соответствует направлению перемещения устройства скребкового типа. Плоская форма применима для небольших подвижных блоков или труб небольшого диаметра, тогда как изогнутая верхняя сторона особо предпочтительна в случае широких подвижных блоков или труб большого диаметра. Радиус изгиба изогнутой верхней стороны предпочтительно соответствует радиусу цилиндрической огибающей поверхности опорного элемента датчиков, образованного сегментами по изобретению, за счет чего в процессе перемещения опорного элемента датчиков подвижные блоки опорного элемента датчиков в допустимой степени касаются внутренней стенки трубы. Для уменьшения трения между подвижными блоками и внутренней стенкой трубы и, тем самым, снижения истирания и увеличения срока службы подвижных блоков могут быть предусмотрены износостойкие металлические башмаки, заделанные заподлицо в подвижные блоки на регулярном расстоянии друг от друга. Кроме того, износостойкие башмаки также увеличивают устойчивость подвижных блоков. Предпочтительно, расстояние между износостойкими башмаками составляет от 1/10 до 3/4 длины подвижного блока.
Подвижные блоки могут быть снабжены углублениями, например, расположенными между износостойкими башмаками. Углубления такого рода являются особо предпочтительными для создания зазора для измерительного поля датчиков, например, ультразвуковых датчиков, несимметрично излучающих ультразвук.
Верхние относительно датчиков плиты могут быть прикреплены к нижней стороне подвижных блоков. За этот счет увеличивается устойчивость сегмента и, тем самым, устойчивость опорного элемента датчиков. При этом подвижные блоки могут иметь отверстия для винтов, а опорные пластины имеют внутреннюю резьбу под такие винты, при помощи которых опорные плиты привинчивают к подвижным блокам. Это не только упрощает сборку сегмента и опорного элемента датчиков, но также замену сегментов, опорных плит и датчиков с целью ремонта.
Опорные плиты могут быть изогнутыми или плоскими, что предпочтительно с точки зрения уменьшения стоимости производства. Если необходимо поддерживать постоянное расстояние между датчиками и внутренней стенкой трубы, для этого соответствующим образом регулируют высоту датчиков в сборе.
Нижние стороны подвижных блоков предпочтительно также имеют плоскую форму и наклонены таким образом, чтобы проходить в радиальном направлении относительно опорного элемента датчиков прикрепляемых опорных плит.
Сегмент по изобретению может быть выполнен полностью или преимущественно в виде единой детали. Предпочтительно, единая деталь состоит одного или нескольких следующих компонентов: подвижных блоков, упругих соединительных элементов, промежуточных сегментов, конусообразного участка сегмента, поперечных ребер. Объединение данных компонентов в единой детали упрощает производство.
Сегмент или его детали, в особенности, деталь, состоящая из множества компонентов, предпочтительно выполнены из упругого пластика, который, с одной стороны, обладает достаточной упругостью для обеспечения гибкости, в особенности, соединительных элементов промежуточных сегментов, а, с другой стороны, обеспечивает достаточную прочность и устойчивость сегментов, в особенности, подвижных блоков для выполнения ими своей функции по направлению датчиков. На практике предпочтительными зарекомендовали себя упругие пластики с твердостью по Шору от 65 до 95. Приемлемым материалом является, например, полиуретан.
Множество сегментов по изобретению образуют опорный элемент датчиков устройства скребкового типа, имеющий форму цилиндрического полого тела. Предпочтительно, опорный элемент датчиков собирают из отдельных сегментов, однако он также может представлять собой единую деталь. Между соседними сегментами такого опорного элемента датчиков могут быть помещены С-образные рессорные листы, подвергающие предварительному натяжению опорный элемент датчиков, за счет чего подвижные блоки сегментов прижимаются к внутренней стенке трубы, по которой перемещается опорный элемент датчиков. Названные рессорные листы предпочтительно прикреплены к опорным плитам, которые, в свою очередь, прикреплены к нижней стороне подвижных блоков. Устройство скребкового типа, имеющее по меньшей мере один опорный элемент датчиков по изобретению, перемещается по трубопроводу с целью осуществления измерений и неразрушающих испытаний материалов.
Далее на примере двух чертежей проиллюстрированы примерные варианты осуществления известных опорных элементов датчиков. На последующих чертежах проиллюстрированы примерные варианты осуществления изобретения. На чертежах показаны:
на фиг.1 - схематический вид сбоку известного из уровня техники опорного элемента датчиков со скошенными подвижными блоками,
на фиг.2 - схематический вид сбоку другого известного из уровня техники опорного элемента датчиков с двумя сегментными кольцами, образованными полосовыми сегментами,
на фиг.3 - вид сбоку известного участка устройства скребкового типа с первым опорным элементом датчиков по изобретению и другим элементом устройства скребкового типа,
на фиг.4 - вид в перспективе сегмента по изобретению с двумя парами подвижных блоков, показанных на фиг.3,
на фиг.5 - вид сбоку сегмента, показанного на фиг.4,
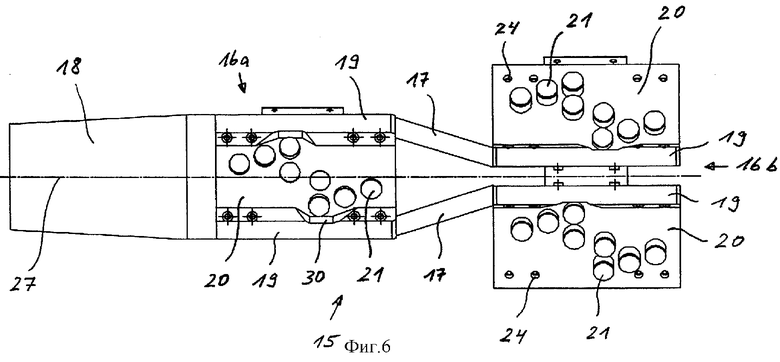
на фиг.6 - вид сверху сегмента, показанного на фиг.4,
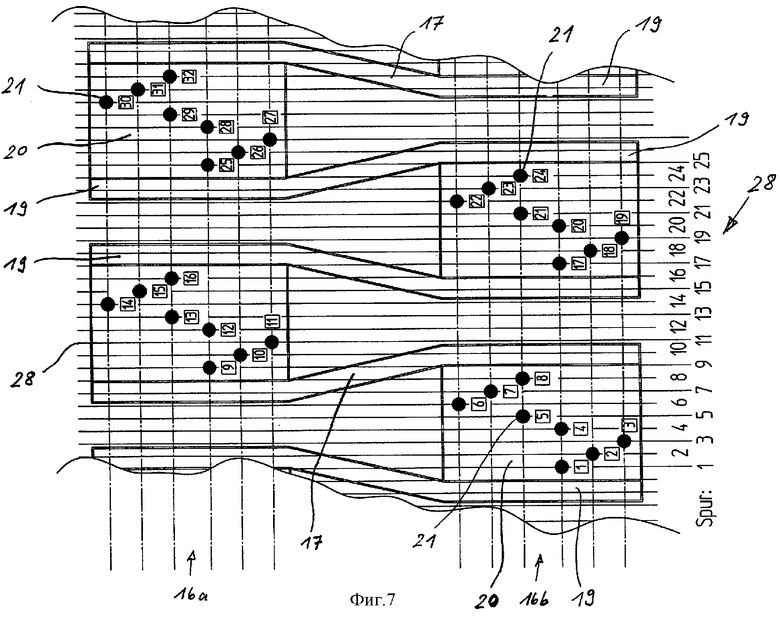
на фиг.7 - схематический вид сверху пары подвижных блоков сегмента, показанного на фиг.4 с указанием траекторий перемещения датчиков,
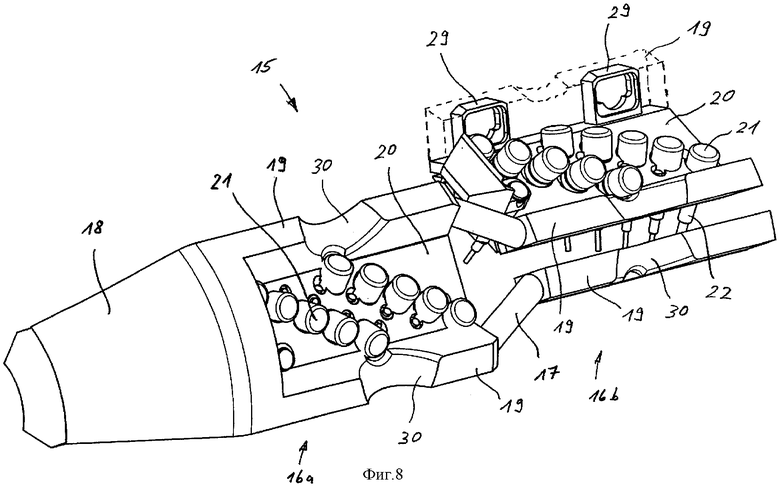
на фиг.8 - вид в перспективе измененного сегмента, показанного на фиг.4, с двумя парами подвижных блоков с износостойкими башмаками,
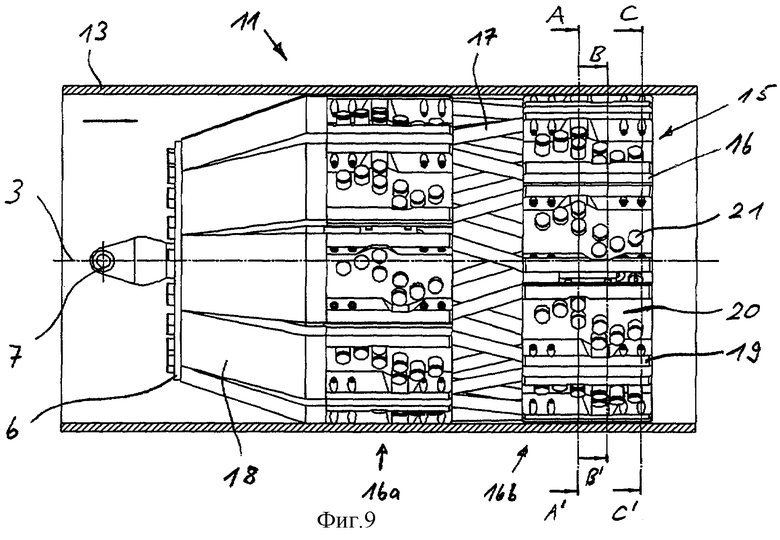
на фиг.9 - вид сбоку опорного элемента датчиков, показанного на фиг.3, сегментами, показанными на фиг.4,
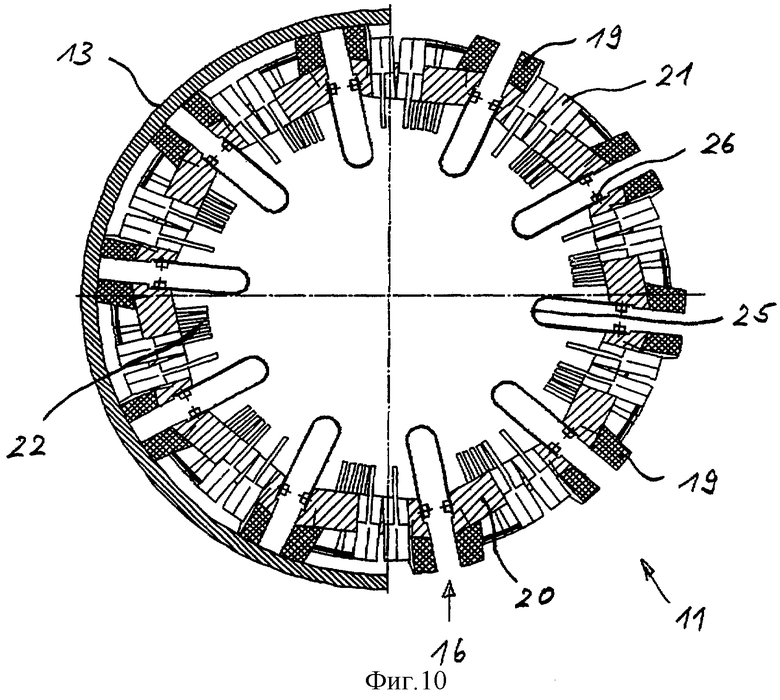
на фиг.10 - сечение по линии А-А' на фиг.9,
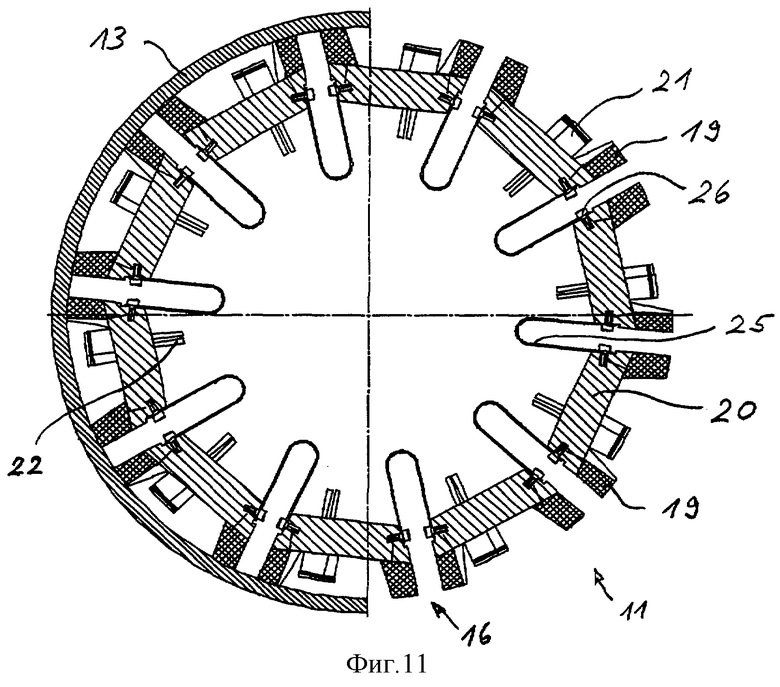
на фиг.11 - сечение по линии В-В' на фиг.9,
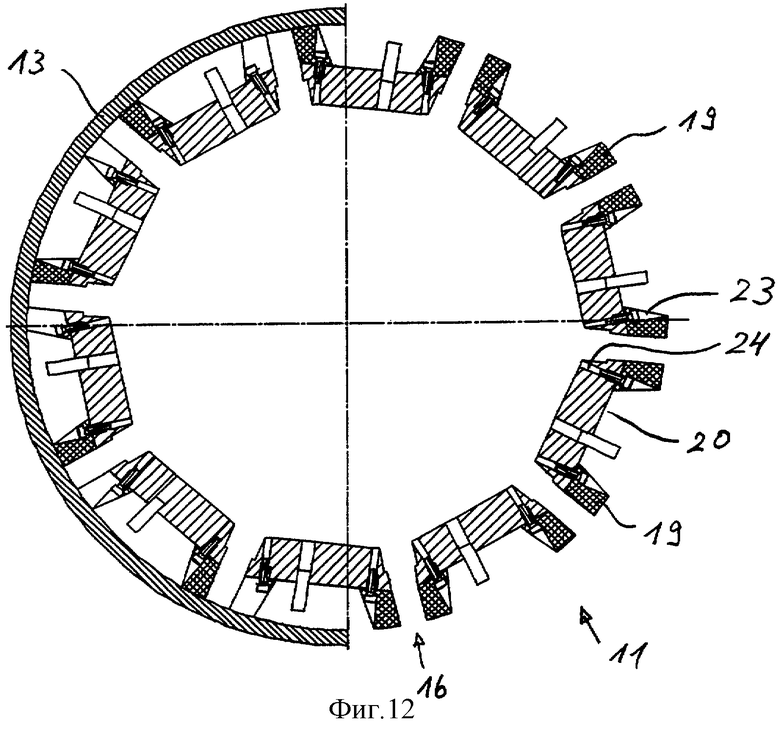
на фиг.12 - сечение по линии С-С' на фиг.9,
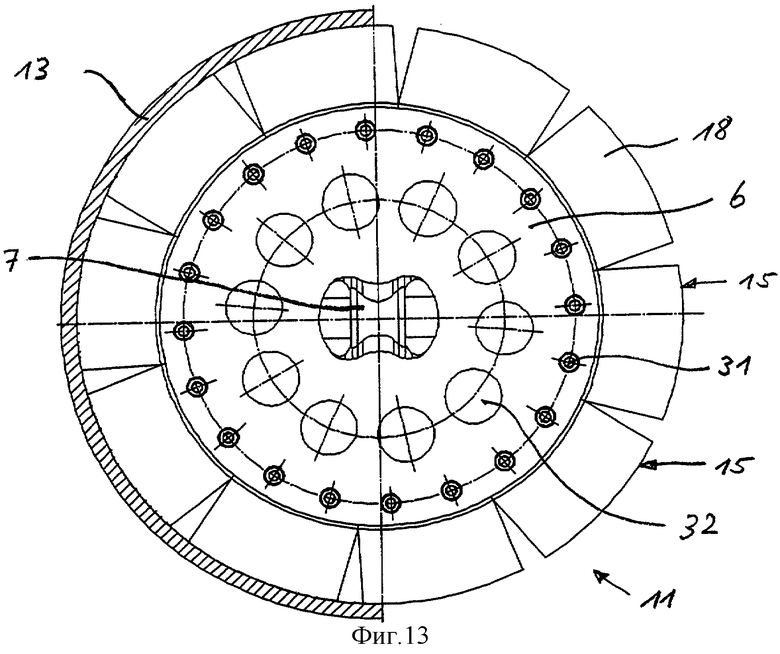
на фиг.13 - лицевая сторона опорного элемента датчиков, показанного на фиг.9, с фланцем,
на фиг.14 - лицевая сторона опорного элемента датчиков, показанного на фиг.9, без фланца,
на фиг.15 - вид сбоку второго опорного элемента датчиков с сегментами с четырьмя парами подвижных блоков,
на фиг.16 - подробный вид сечения по линии А-А' на фиг.15,
на фиг.17 - вид в перспективе сегмента с четырьмя парами подвижных блоков, показанного на фиг.15,
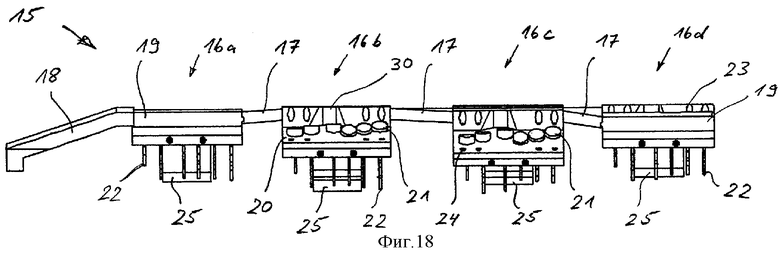
на фиг.18 - вид сбоку сегмента, показанного на фиг.17,
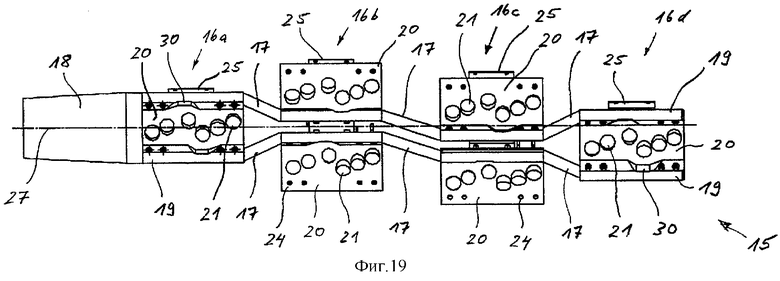
на фиг.19 - вид сверху сегмента, показанного на фиг.17,
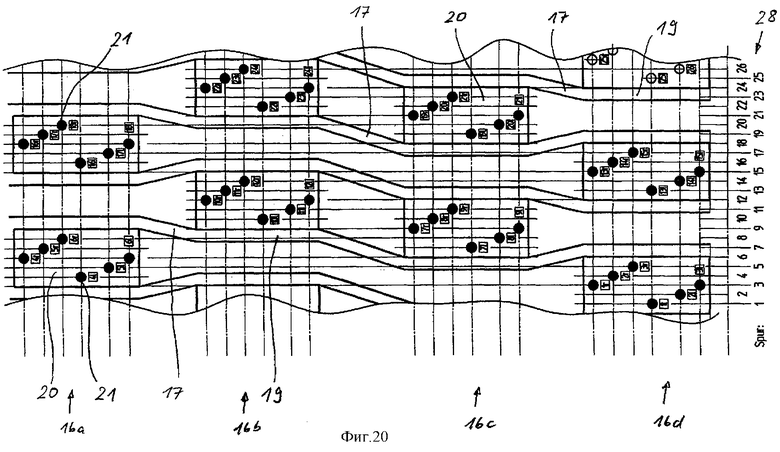
на фиг.20 - схематический вид сверху четырех пар подвижных блоков сегмента с указанием траекторий перемещения датчиков,
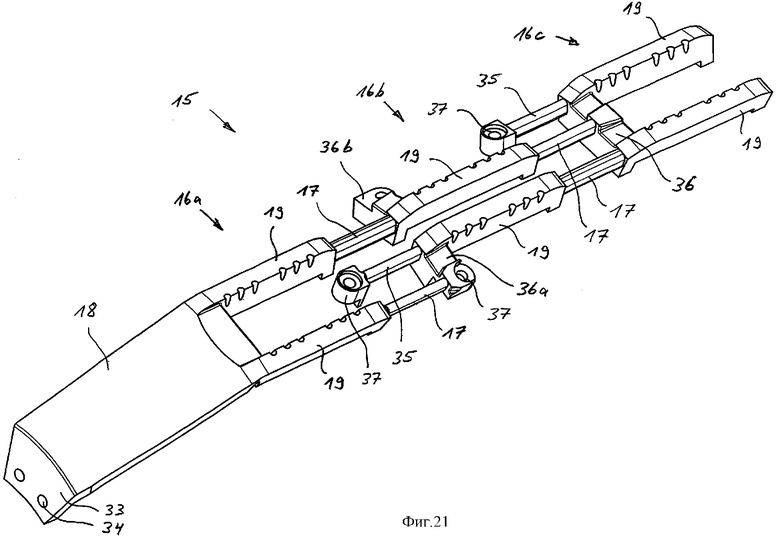
на фиг.21 - вид в перспективе третьего варианта осуществления сегмента по изобретению с тремя парами подвижных блоков,
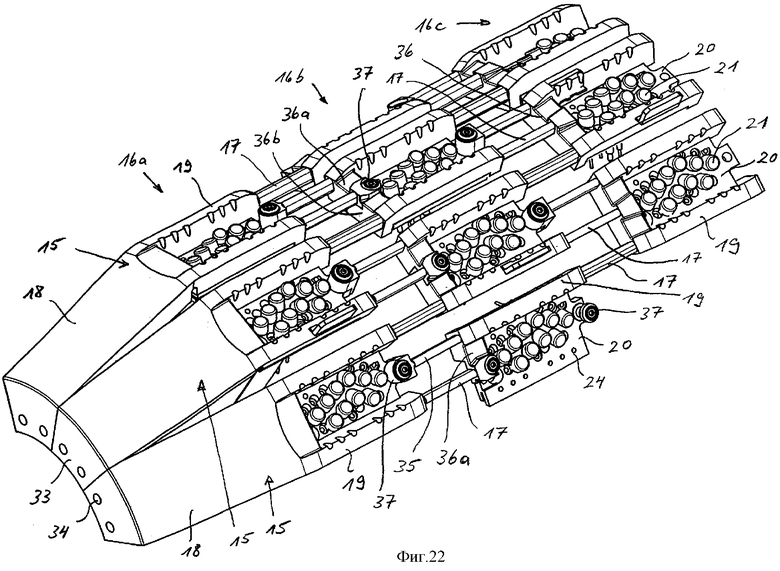
на фиг.22 - вид в перспективе трех сегментов в сборе, показанных на фиг.21,
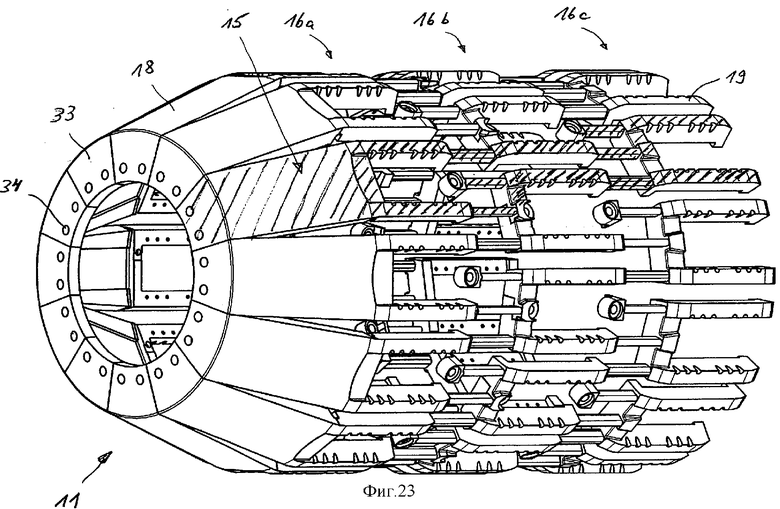
на фиг.23 - вид в перспективе опорного элемента датчиков, собранного из сегментов, показанных на фиг.21,
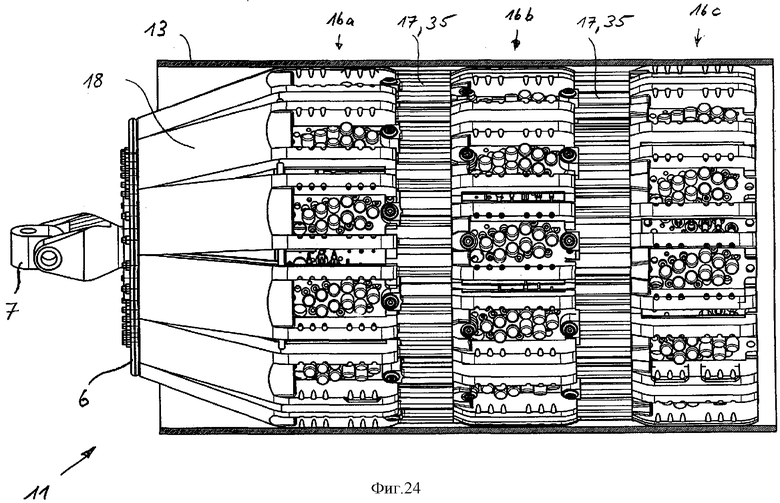
на фиг.24 - вид сбоку опорного элемента датчиков, показанного на фиг.23,
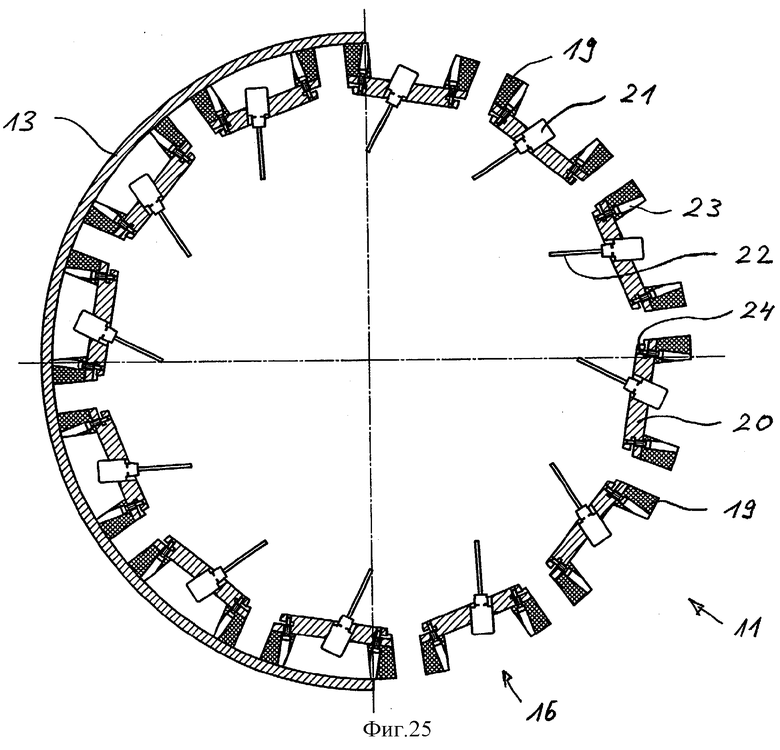
на фиг.25 - сечение фиг.24,
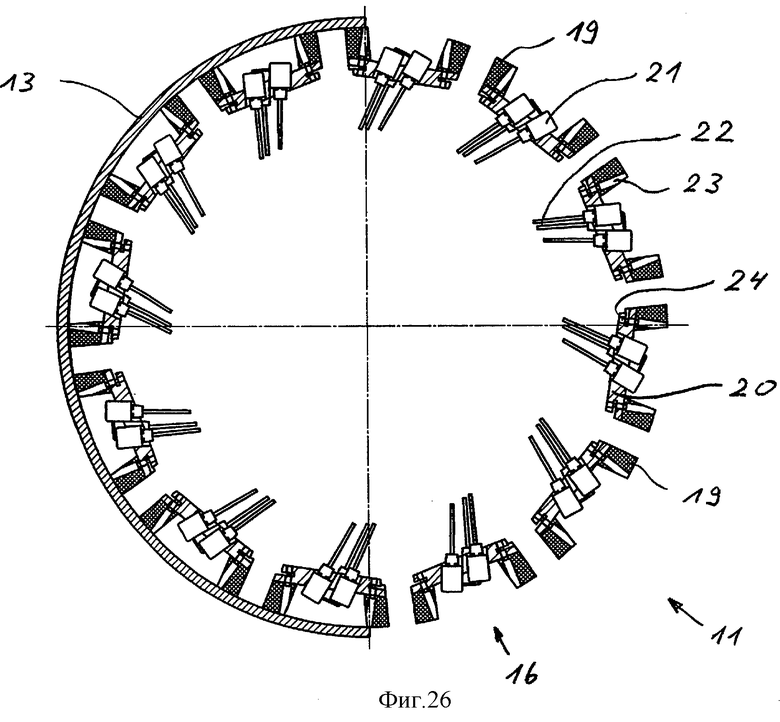
на фиг.26 - другое сечение фиг.24,
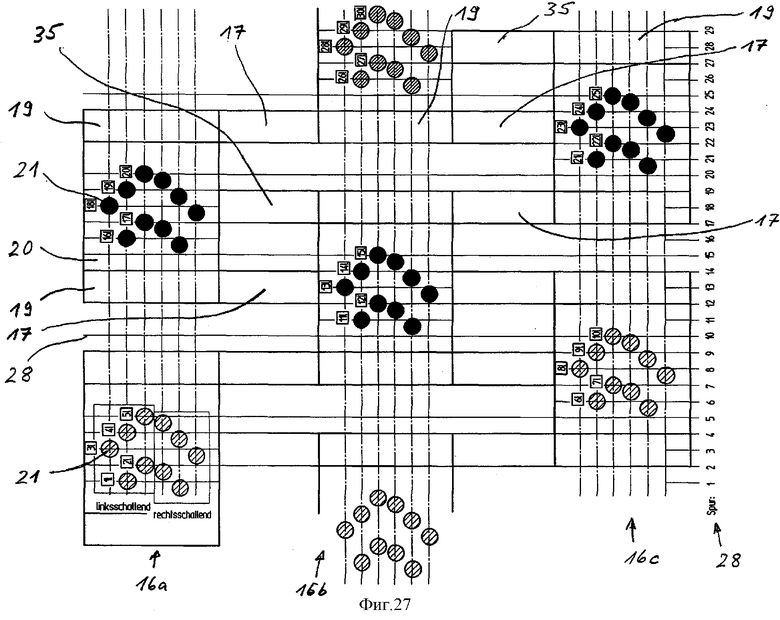
на фиг.27 - схематический вид сверху пары подвижных блоков сегмента, показанного на фиг.21, с указанием траекторий перемещения датчиков.
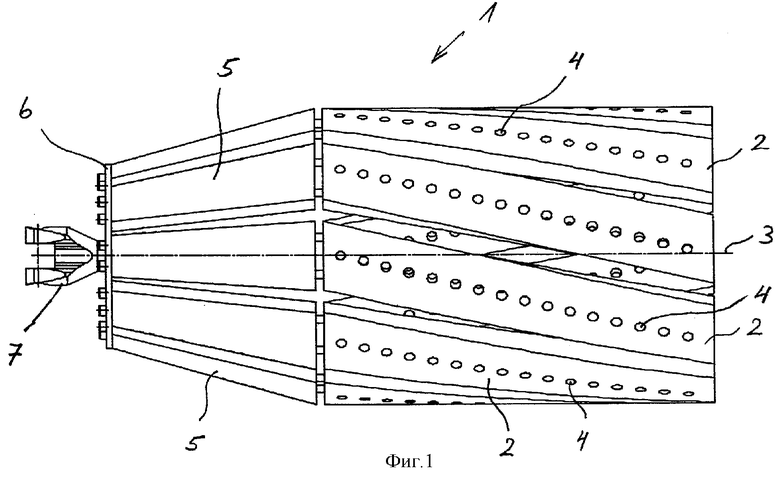
На фиг.1 схематически показан известный из уровня техники опорный элемент 1 датчиков, собранный из полосовых сегментов 2 в виде подвижных блоков, скошенных вдоль продольной оси опорного элемента 1 датчиков и проходящих под острым углом к центральной оси 3 опорного элемента 1 датчиков. В полосовых сегментах 2 имеются отверстия 4 для датчиков. На лицевой стороне опорного элемента 1 датчиков расположен участок 5 в виде конусообразной полосы. Полосовые сегменты 2 прикреплены друг другу при помощи фланца 6. Посередине фланца 6 расположен соединительный элемент 7, служащий для соединения с другими элементами устройства скребкового типа и предпочтительно представляющий собой универсальный шарнир.
В процессе перемещения опорного элемента 1 датчиков по трубопроводу на скошенные полосовые сегменты 2 в направлении, параллельном центральной оси, действуют силы восстановления. Кроме того, опорный элемент 1 датчиков в силу своей конструкции имеет фиксированную длину. Результатом этого является плохая способность дугообразного перемещения при пересечении дугообразных участков труб с малым диаметром. На практике радиусы изгиба, которые должен преодолеть устройство скребкового типа, до 1,5 раз превышают диаметр трубопровода. Следовательно, применение известного устройства скребкового типа с заданной общей длиной ограничено трубопроводами большого диаметра.
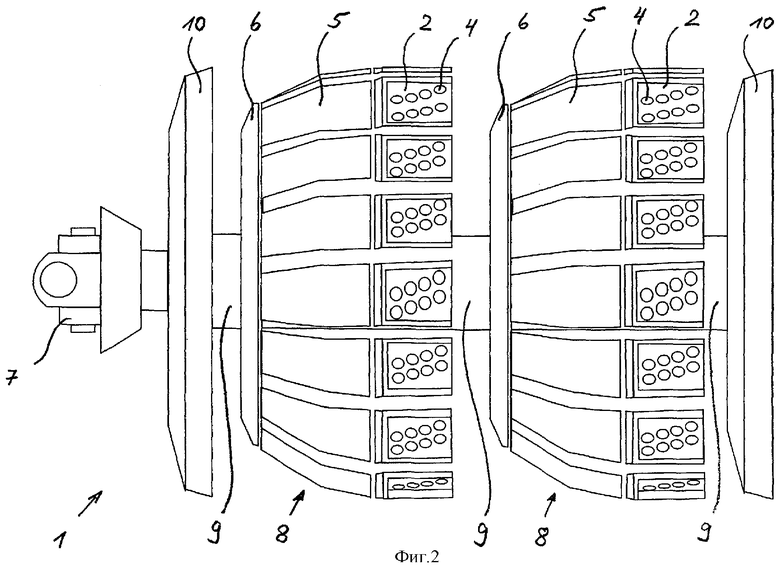
На фиг.2 схематически показан другой известный опорный элемент 1 датчиков, имеющий два последовательно расположенных сегментных кольца 8, собранных из полосовых сегментов 2, проходящих в направлении перемещения элемента 1 и соединенных друг с другом при помощи жесткой оси 9. В полосовых сегментах 2 имеются отверстия 4 для датчиков. Полосовые сегменты 2 соединены друг с другом при помощи фланца 6 на участках 5 в виде конусообразных полос. На оси 9 расположена направляющая манжета 10 и соединительный элемент 7, служащий для соединения с другими элементами устройства скребкового типа с торцов и лицевой стороны, соответственно.
На фиг.3 в продольном сечении трубопровода 13 показан вид сбоку первого варианта осуществления опорного элемента 11 датчиков по изобретению и другой опорный элемент 12 датчиков, при помощи соединительного элемента 7, соединенного с универсальным карданом. Опорный элемент 11 датчиков собран из сегментов 15, каждый из которых имеет две последовательно расположенных параллельных пары подвижных блоков. На опорный элемент 12 датчиков опираются, например, устройства записывающие результаты измерений, или блок питания, при этом элемент 12 имеет две манжеты 10, касающихся внутренней стенки трубы.
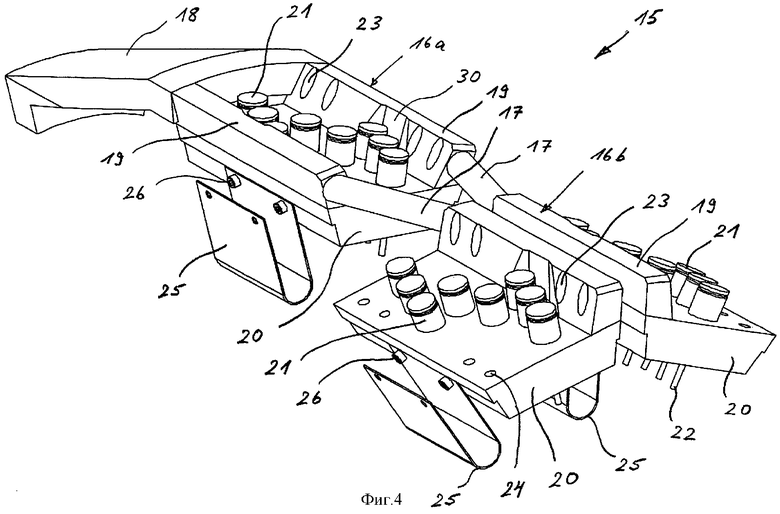
На фиг.4, дополняющей фиг.3, показан вид в перспективе сегмента 15 по изобретению с двумя последовательно расположенными парами 16а, 16b подвижных блоков, которые соединены друг с другом двумя сходящимися упругими промежуточными сегментами 17. На лицевой стороне сегмента 15, обращенной в направлении перемещения устройства скребкового типа, расположен конусообразный участок 18 сегмента в форме усеченного конуса. Лицевая сторона конусообразного участка 18 сегмента расположена под соответствующим углом, позволяющим прикрепить фланец.
Между подвижными блоками 19 первого (в направлении перемещения устройства скребкового типа) пары 16а подвижных блоков расположена опорная плита 20 с датчиками 21. Датчики 21 прикреплены к опорной плите 20 таким образом, что соединители 22 датчиков (например, штырьковые или вилки) выступают из-под нижней стороны опорной плиты 20. Датчики 21 могут быть расположены ортогонально или асимметрично по отношению к внутренней стенке трубы в зависимости от целей применений и типа измерений.
Подвижные блоки 19 предпочтительно имеют трапецеидальную форму в поперечном сечении и снабжены отверстиями 24, доступ к которым осуществляется через отверстия 23 и в которые входят винты, используемые для прикрепления опорных плит 20 к подвижным блокам 19.
К боковым поверхностям опорных плит 20 при помощи винтов 26 прикреплены С-образные рессорные листы 25. Одна из опорных плит 20 привинчена к каждому подвижному блоку 19 второй пары 16b подвижных блоков, при этом названную опорную плиту 20 в свою очередь привинчивают к подвижным блокам 19 соседних пар 16 подвижных блоков соседних сегментов 15 в процессе сборки таких сегментов 15, за счет чего образуется опорный элемент 11 датчиков.
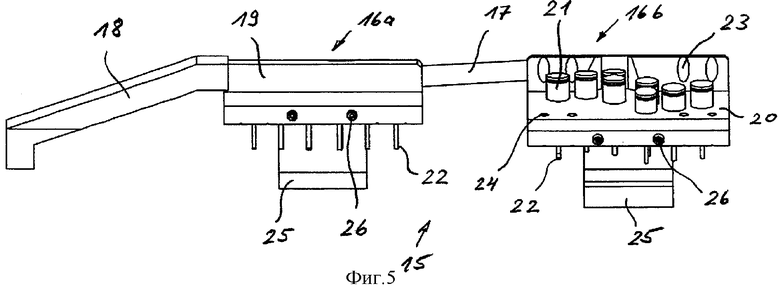
На фиг.5 и фиг.6 показан вид сбоку и вид сверху, соответственно, сегмента 15, показанного на фиг.4. Сегмент 15 расположен преимущественно симметрично относительно центральной оси 27.
На фиг.7 схематически проиллюстрированы траектории перемещения 28 датчиков 21, установленных на опорных плитах 20 между парами подвижных блоков и между соседними подвижными блоками 19 соседних пар 16 подвижных блоков. Траектории перемещения 28 всех датчиков представляют собой равноудаленные друг от друга параллельные прямые линии, за счет чего области активного сканирования датчиков 21 полностью охватывают внутреннюю стенку трубы. Датчики 21 с соседними траекториями перемещения 28 обычно расположены на одной опорной плите 20.
На фиг.8 показан вид в перспективе сегмента 15 по изобретению с двумя парами 16 подвижных блоков. Каждый подвижный блок 19 имеет заделанные заподлицо с его поверхностью два износостойких башмака 29. На фиг.8 показано, как износостойкие башмаки 29 окружены литым материалом. Кроме того, на фиг.8 показаны углубления 30 в подвижных блоках 19, создающие зазор для датчиков, которые излучают звуковые сигналы в боковом направлении.
На фиг.9 показан вид сбоку опорного элемента 11 датчиков по изобретению в продольном сечении трубопровода 13. Опорный элемент 11 датчиков собран из сегментов 15, каждый из которых имеет последовательно расположенные пары 16 подвижных блоков с параллельными подвижными блоками 19. Пары 16 подвижных блоков соединены при помощи упругих расходящихся промежуточных сегментов 17. Конусообразные участки 18 сегментов 15 имеют форму усеченного конуса. Они соединены при помощи фланца 6, который закреплен на лицевой стороне при помощи гаек. В центральной части фланца 6 расположен соединительный элемент 7, который может использоваться для прикрепления опорного элемента 11 датчиков к другому опорному элементу датчиков.
На фиг.10 показано сечение по линии А-А' опорного элемента 11 датчиков по изобретению, показанного на фиг.9. Как и на других фигурах, трубопровод 13, внутренняя стенка которого совпадает с цилиндрической огибающей поверхностью опорного элемента 11 датчиков, для ясности показан лишь на одной половине фигуры. Опорные плиты 20, расположенные между парами 16 подвижных блоков и имеющие датчики 21, закреплены между одним из подвижных блоков 19 пары 16 подвижных блоков и соседним подвижным блоком 19 соседней пары 16 подвижных блоков. К боковым поверхностям опорных плит 20 прикреплены С-образные рессорные листы 25, расположенные между опорными плитами 20. Рессорные листы 25 подвергают опорный элемент 11 датчиков предварительному натяжению, за счет чего подвижные блоки 19 тесно соприкасаются с внутренней стенкой трубопровода 13.
На фиг.11 показано сечение по линии В-В', а на фиг.12 - сечение по линии С-С' опорного элемента 11 датчиков по изобретению, показанного на фиг.9.
На фиг.13 показана лицевая сторона опорного элемента 11 датчиков. Конусообразные участки 18 сегментов 15 соединены при помощи кругового фланца 6, прикрепленного при помощи винтов 31. Круговой фланец 6 имеет отверстия, через которые проходят кабели. В центральной части кругового фланца 6 закреплен соединительный элемент 7.
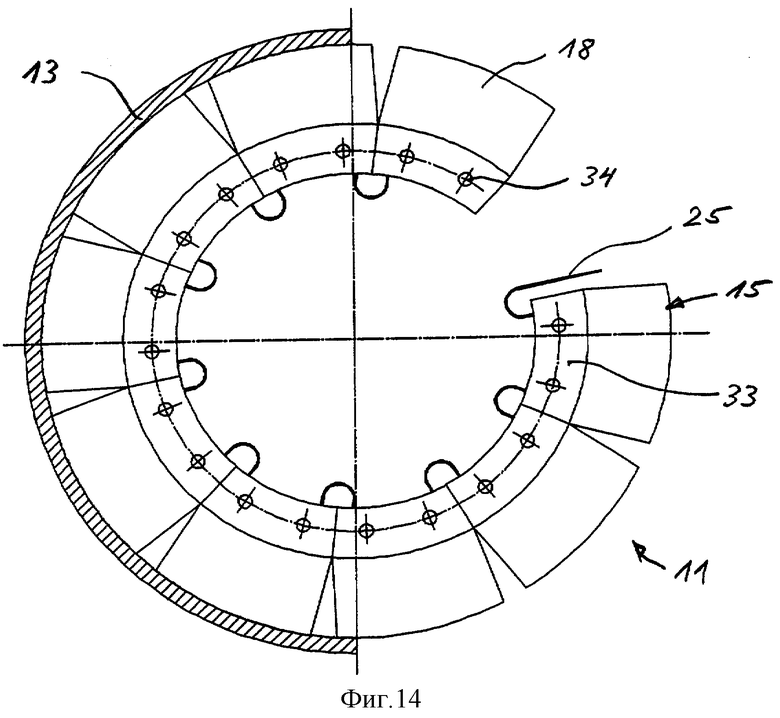
На фиг.14 показана лицевая сторона опорного элемента 11 датчиков, при этом не показан фланец, который прикреплен к конусообразным участкам 18 сегментов, и не показан один сегмент 15. Конусообразные участки 18 последовательно расположены в форме кольца и образуют расположенную на лицевой стороне кольцевую горизонтальную поверхность 33 для прикрепления фланца. В поверхности 33 имеются отверстия 34 с резьбой для винтов 31.
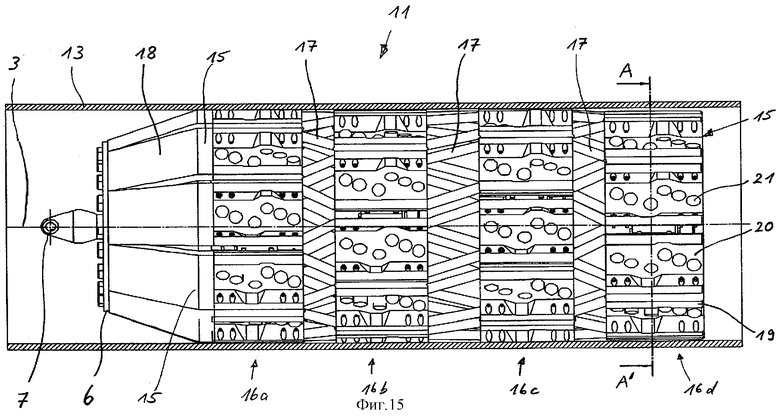
На фиг.15 в продольном сечении трубопровода 13 показан вид сбоку второго опорного элемента 11 датчиков, который предпочтительно применяется для проверки на трещины. Опорный элемент 11 датчиков собран из сегментов 15, каждый из которых имеет по четыре пары 16а, 16b, 16с и 16d подвижных блоков, соединенных при помощи сходящихся, параллельных и расходящихся упругих промежуточных элементов 17.
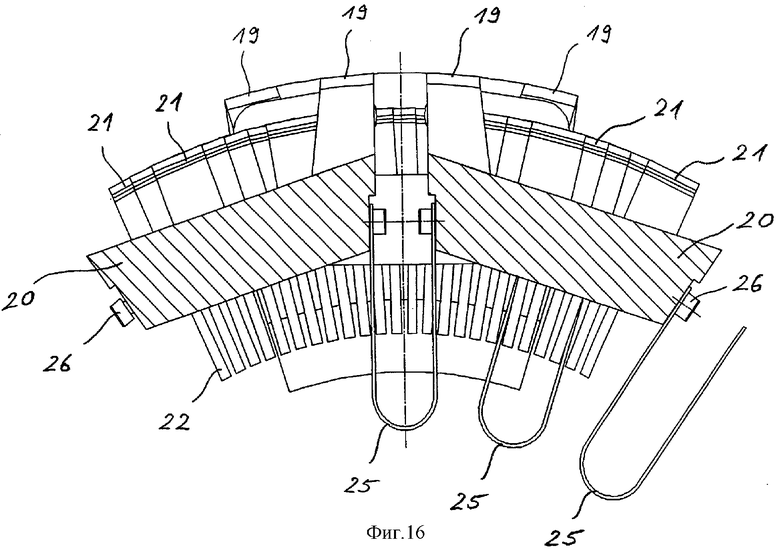
На фиг.16 подробно показано сечение по линии А-А' на фиг.15. Датчики 21 прикреплены к опорным плитам 20, соединенным с С-образными рессорными листами 25, при этом соединители 22 датчиков выступают с нижней стороны опорной плиты 20.
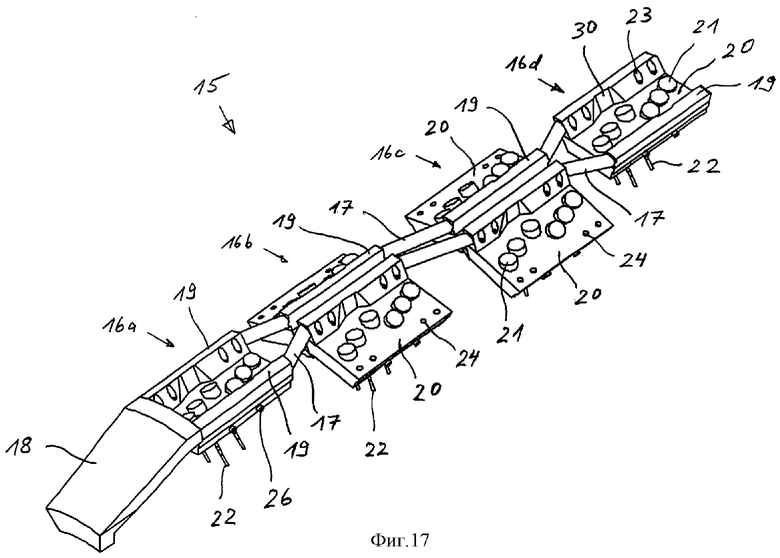
На фиг.17 показан вид в перспективе сегмента 15 по изобретению, показанного на фиг.15, с четырьмя последовательно расположенными параллельными парами подвижных блоков 16а, 16b, 16с и 16d, при этом опорные плиты 20 датчиков 21 установлены между первой парой 16а подвижных блоков и между четвертой парой 16d подвижных блоков. Каждая из опорных плит 20 прикреплена к каждому подвижному блоку 19 второй и третьей пары 16b и 16с подвижных блоков и может быть соединена с подвижным блоком соседнего сегмента. Первая и вторая пары 16а, 16в подвижных блоков соединены при помощи сходящихся промежуточных элементов 17, вторая и третья пары 16b и 16с подвижных блоков соединены при помощи параллельных промежуточных элементов 17, а третья и четвертая пары 16с и 16d подвижных блоков соединены при помощи расходящихся промежуточных элементов 17, при этом все названные промежуточные элементы 17 входят в контакт с подвижными блоками 19 под определенным углом.
На фиг.18 и 19 показан вид сбоку и вид сверху, соответственно, сегмента 15, показанного на фиг.17. Третья и четвертая пары 16с и 16d подвижных блоков сдвинуты в боковом направлении относительно центральной оси 27 первой и второй пары 16а, 16b подвижных блоков, за счет чего соседние активные области сканирования датчиков 21 различных опорных плит 20 дополняют друг друга. Это также обеспечивает высокую точность измерений, необходимую для испытания трубопровода на трещины.
На фиг.20, дополняющей фиг.15, схематически проиллюстрированы траектории перемещения 28 датчиков 21. За счет числа и расположения датчиков 21 и сдвига опорных плит 20 в направлении окружности по два датчика 21 различных опорных плит 20 имеют одинаковые траектории перемещения 28. Таким образом, активные области сканирования датчиков 21 с одинаковой траекторией перемещения перекрывают друг друга, например, с целью обеспечения более высокой точности измерений. Тем не менее, датчики 21 также могут излучать звуковые сигналы в различных направлениях, например, слева направо, например, для проверки на трещины.
На фиг.21 показан другой предпочтительный вариант осуществления сегмента 15 по изобретению, которому придана особая устойчивость к сильным тяговым усилиям. Сегмент 15 имеет три последовательно расположенных пары 16а, 16b, 16с подвижных блоков, состоящих из двух подвижных блоков 19 каждая. Лицевая сторона сегмента 15 имеет конусообразную форму.
В отличие от вариантов осуществления, проиллюстрированных на фиг.8 и фиг.17, промежуточные элементы 17 между последовательно расположенными подвижными блоками 19 ориентированы по направлению перемещения устройства скребкового типа и, следовательно, на такие промежуточные элементы 17 не воздействуют поперечные силы. Кроме того, в данном варианте осуществления предусмотрены дополнительные продольно проходящие соединительные элементы 35, расположенные между подвижными блоками 19 и опорными плитами 20 (смотри фиг.22), например, для несения нагрузки. Один промежуточный элемент 17, расположенный между первой парой 16а подвижных блоков и второй парой 16b подвижных блоков, проходит непосредственно между последовательно расположенными подвижными блоками 19 пар 16а, 16b подвижных блоков. Другой промежуточный элемент 17, расположенный между первой парой 16а подвижных блоков и второй парой 16b подвижных блоков, закреплен при помощи поперечного ребра 36а, на котором промежуточный элемент 17 при помощи рукава 37 прикреплен к параллельному параллельно сдвинутому подвижному блоку 19 второй пары 16b подвижных блоков.
Такой параллельно сдвинутый подвижный блок 19 второй пары 16b подвижных блоков имеет проходящий в направлении конусообразного участка 18 сегмента соединительный элемент 35, снабженный рукавом 37, к которому может крепиться опорная плита 20, являющаяся частью первой пары 16а подвижных блоков. Кроме того, такой подвижный блок 19 при помощи промежуточного элемента 17 непосредственно соединен с подвижным блоком третьей пары 16с подвижных блоков. Другой подвижный блок 19 второй пары 16b подвижных блоков имеет расположенное на лицевой стороне поперечное ребро 36b, в которое входит рукав 37 промежуточного элемента 17 и поперечное ребро 36а соседнего сегмента 15. При помощи промежуточного элемента 17 он непосредственно соединен с поперечным ребром 36, которое закреплено между подвижными блоками 19 и на лицевой стороне подвижных блоков 19 третьей пары 16с подвижных блоков.
Функция соответствующих поперечных ребер 36а, 36b соответствует функции поперечного ребра 36. Подвижный блок 19 третьей пары 16с подвижных блоков, непосредственно не соединенный с подвижным блоком 19 второй пары 16b подвижных блоков, имеет расположенный на лицевой стороне соединительный элемент 35, снабженный рукавом 37, к которому может крепиться опорная плита 20.
Если каждая из опорных плит 20 соединена с первой парой 16а подвижных блоков и третьей парой 16с подвижных блоков, то при перемещении опорного элемента датчиков через трубопровод создается прямой поток сил, передающийся от одного подвижного блока 19 первой пары 16а подвижных блоков поперечному ребру 36 третьей пары 16с подвижных блоков, и другой прямой поток сил, передающийся от опорной плиты 20, расположенной между первой парой 16а подвижных блоков, одному из подвижных блоков 19 третьей пары 16с подвижных блоков посредством соединительного элемента 35, при помощи рукава 37, прикрепленного к опорной плите 20 и соединяющего опорную плиту 20 с подвижным блоком 19 второй пары 16b подвижных блоков. Это также относится к опорной плите 20, прикрепленной ко второй паре 16b подвижных блоков и обеспечивающей соединение с соседним сегментом.
Это придает сегменту 15 и опорному элементу датчиков, собранному из таких сегментов, отличную устойчивость и обеспечивает хорошую управляемость датчиков даже при наличии сильных тяговых усилий.
На фиг.22 показано сечение опорного элемента датчиков с тремя собранными сегментами 15, показанными на фиг.21, у которого опорная плита 20 расположена между первой парой 16а подвижных блоков и третьей парой 16с подвижных блоков. Кроме того, между каждым подвижным блоком 19 второй пары 16b подвижных блоков сегмента 15 и соседним подвижным блоком 19 второй пары 16b подвижных блоков соседнего сегмента 15 расположена еще одна опорная плита 20. Как следует из фиг.22, конструкция отличается компактностью и высокой устойчивостью и одновременно позволяет использовать множество датчиков 21, включая датчики с перекрывающими друг друга траекториями перемещения, в особенности, расположенные на различных опорных плитах. Для простоты на фиг.22 не показаны С-образные рессорные листы, расположенные между соседними подвижными блоками 19.
На фиг.23 показан опорный элемент 11 датчиков, собранный из сегментов 15, показанных на фиг.21. Для простоты опорные плиты 20 не показаны на фиг.23. Кроме того, один из сегментов 15 обозначен штриховкой, с целью более четко проиллюстрировать конструкцию и модульный принцип сборки элемента 11 из одинаковых сегментов 15, показанных на фиг.21.
На фиг.24-27 дополнительно проиллюстрирован опорный элемент 11 датчиков, показанный на фиг.23. Фиг.24 соответствует фиг.9, фиг.25 и 26 соответствуют фиг.10-12, при этом на них не показаны С-образные рессорные листы, а фиг.27 соответствует фиг.20.
Сегмент опорного элемента датчиков для устройства скребкового типа, состоящий, по меньшей мере, из двух пар преимущественно параллельных подвижных блоков, расположенных позади друг друга, между, по меньшей мере, одной парой подвижных блоков расположена опорная плита для датчиков, сегмент может сочетаться с другими сегментами, образуя опорный элемент датчиков. Изобретение также относится к опорному элементу датчиков в виде полого цилиндрического тела для устройства скребкового типа, собранный из множества упомянутых сегментов. Техническим результатом изобретения является возможность компенсировать колебания диаметра трубопровода и сохранять подвижность блоков при колебаниях диаметра трубопровода. 2 н. и 37 з.п. ф-лы, 27 ил.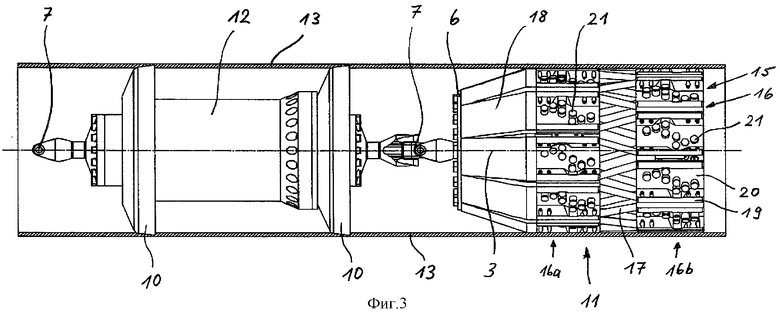
| DE 3626646 A, 18.02.1988 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ МАТЕРИАЛА ТРУБОПРОВОДА | 1998 |
|
RU2139468C1 |
| УНИВЕРСАЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ СНАРЯД-ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ЗА СОСТОЯНИЕМ ТРУБОПРОВОДА | 1993 |
|
RU2111453C1 |
| US 5616854 A, 01.04.1997. | |||

