Изобретение относится к магнитным измерениям на подвижных объектах, в частности к приборам, предназначенным для измерения компонент и полного вектора индукции магнитного поля Земли (МПЗ), а также магнитному курсоуказанию и навигации на транспортных средствах.
Широко известно применение датчиков магнитного поля земли в бортовых навигационных системах, в которых измерительные каналы преобразования и обработки геомагнитной информации содержат усилительно-преобразовательные устройства и вычислительные блоки многофункциональной обработки сигналов, требующие высокого энергопотребления, а следовательно, являющиеся источником излучения электромагнитных помех, влияющих на точность измерения датчиков магнитного поля. Непредсказуемый характер сильного изменения потребляемых токов значительно усложняет проблему измерения этих помех, а следовательно, исключается возможность их компенсации.
Так, например, известны бортовые магнитные компасы [1-3], содержащие многофункциональный канал преобразования и обработки информации и подключенный к его входам трехосный датчик магнитного поля, причем канал преобразования и обработки информации содержит устройства преобразования, вычислитель с портами приема и выдачи информации, измеритель углов и компенсатор магнитной девиации.
Магнитным компасом определяется магнитный курс подвижного объекта по результатам измерения датчика магнитного поля и измерителя углов соответственно компонент вектора индукции МПЗ и углов крена и тангажа объекта. В вычислителе осуществляется вычисление магнитного курса при использовании кодовых эквивалентов компонент вектора индукции и угловых величин, формируемых устройствами преобразования. Компенсатором девиации исключается влияние постоянных магнитных и электромагнитных помех объекта и помех от собственного оборудования.
Содержание энергопотребляемых устройств в канале преобразования и обработки информации, значительно увеличивающих его потребляемый ток, создает большие проблемы помехозащищенности, обусловленные переменным электромагнитным влиянием оборудования на магниточувствительный датчик.
Широко применяемым способом устранения влияния перечисленных помех при построении магнитоизмерительных приборов является разнесенное пространственное взаимное расположение магниточувствительного датчика и влияющего оборудования, в частности приемо-обрабатывающего оборудования, используемого для приема и обработки выходных сигналов датчика.
Обеспечивая высокую помехозащищенность, данный способ измерения значительно усложняет магнитоизмерительный прибор в целом ухудшением весогабаритных характеристик, обусловленных необходимостью применения соединительного жгута и разъемных соединений для связи датчика и измерительно-преобразовательного блока. Кроме того, для удаления датчика часто появляется необходимость применения выносных штанг специальной конструкции. Эти проблемы особенно заметно проявляются при осуществлении магнитных измерений на малых подвижных объектах (микро- и наноспутниках, беспилотных самолетах, малогабаритных подводных аппаратах и т.д.).
Частичным устранением указанного недостатка является обеспечение возможности и условий конструктивного совмещения магниточувствательного датчика и приемо-обрабатывающего оборудования путем уменьшения электромагнитного и магнитного влияния последнего на датчик. Способами устранения указанного влияния являются уменьшение в составе оборудования ферромагнитных масс, уменьшение потребляемых токов, реализация бифилярной проводки токоведущих цепей. Создание новых материалов, развитие и возможность применения гибридно-пленочной или интегральной технологий при изготовлении магнитометров обеспечивают возможность изготовления миниатюрных датчиков магнитного поля и возможность применения бескорпусной элементной базы, сокращающей или исключающей наличие ферромагнитных масс, а возможность применения элементной базы с микромощным потреблением обеспечивает заметное снижение потребляемой мощности. Перечисленные обстоятельства обеспечивают в настоящее время возможность разработки и широкую перспективу применения моноблочной конструкции малогабаритных магнитометров, основанных на принципе конструктивного совмещения датчика магнитного поля и измерительно-преобразовательной части магнитометра. Примером известных и широко применяемых на подвижных объектах моноблочных магнитометров являются разработки ОАО Раменского приборостроительного конструкторского бюро [4], а также разработки зарубежных фирм [5].
Общим недостатком этих устройств является низкий функциональный ресурс, обусловленный отсутствием возможности применения в их составе мобильных вычислительных средств, из-за ограниченной помехоустойчивости.
Известно устройство для измерения модуля вектора индукции МПЗ [6 (с.145), 7] выполненное в виде феррозондовой системы ориентации платформы по направлению вектора индукции магнитного поля, содержащей три ортогонально ориентированных феррозонда, измерительную цепь и исполнительные двигатели, которые устанавливаются на той же платформе, что и феррозонды так, что взаимное расположение феррозондов и двигателей остается неизменным, причем в качестве исполнительных двигателей применены контуры с током.
Ориентация платформы осуществляется с помощью исполнительных двигателей, управляемых выходными сигналами двух ориентирующих феррозондов, третий измерительный феррозонд ориентируется параллельно вектору индукции измеряемого поля, то есть показания измерительного феррозонда являются результатом измерения модуля вектора индукции МПЗ. В данном случае возможно сильное влияние магнитного поля контуров с токами на феррозонды, заметно снижающее точность измерения. Во избежание влияния магнитного поля контуров на феррозонды последние включаются в измерительную цепь в моменты, когда ток в упомянутых контурах отсутствует. То есть в данном устройстве реализован способ временного разделения процессов измерения и отработки сигналов рассогласования.
Тем не менее, данный принцип реализации временного разделения не исключает возможности влияния токопотребляющих устройств цепи измерения на феррозонды. Вынужденная их установка вдали от феррозондов за пределами платформы вызывает потребность дополнительных разъемных соединений и жгута связи, что усложняет устройство в целом.
Потребностью современных и перспективных средств магнитных измерений на подвижных объектах является обеспечение функциональной автономности, расширение их функционального ресурса, а также обеспечение и расширение возможности магистрально-модульного принципа информационного обмена на основе унифицированного интерфейса в бортовой информационно-измерительной системе. Эта потребность обусловлена необходимостью функционально-автономной обработки сигналов датчиков магнитного поля (усиление, аналоговое и аналого-цифровое преобразование, фильтрация и пр.), необходимостью определения параметров, функционально зависимых от компонент вектора измеряемой индукции МПЗ (углы ориентации и магнитный курс объекта, модуль вектора магнитной индукции, производные компонент вектора индукции, пространственные градиенты магнитного поля и пр.), а также необходимостью информационного обеспечения потребителей информационно-измерительной системы с помощью средств передачи информации. Обеспечение и реализация перечисленных возможностей перспективных средств магнитных измерений вызывает потребность значительного увеличения их потребляемых токов, создающих большие проблемы помехозащищенности, обусловленные переменным электромагнитным влиянием приемо-обрабатывающего оборудования на магниточувствительный датчик.
Наиболее близким по технической сущности к предлагаемому и выбранным в качестве прототипа является устройство для измерения полного вектора магнитного поля [8], содержащее последовательно соединенные, жестко связанные с объектом и взаимно близко расположенные трехкомпонентный векторный датчик магнитного поля и приемо-обрабатывающее устройство, включающее последовательно соединенные коммутатор, входы которого подключены к соответствующим выходам датчика магнитного поля, устройство обработки сигналов, выполненное, например, в виде блока аналого-цифрового преобразования и микроЭВМ, управляющий выход которой подключен к входу управления коммутатора.
Устройство работает следующим образом.
С помощью трехкомпонентного датчика магнитного поля осуществляется преобразование компонент вектора магнитной индукции в выходные напряжения, подаваемые на входы коммутатора приемо-обрабатывающего устройства, который пропускает их поочередно в устройство обработки сигнала, в данном случае выполненное в виде блока аналого-цифрового преобразования, где происходит выделение полезного информативного сигнала и преобразование его в код, поступающий на микроЭВМ, в которой происходит окончательная обработка информативного сигнала и в общем случае могут осуществляться математические операции реализации алгоритма определения различных функционально зависимых от компонент вектора индукции МПЗ параметров (модуль вектора индукции МПЗ, углы ориентации и др.). МикроЭВМ также управляет работой коммутатора и осуществляет связь с внешними потребителями с помощью собственного интерфейса через порты ввода и вывода.
Работа известного устройства сопровождается большим потреблением тока приемо-обрабатывающим устройством, а также переменным и непредсказуемым характером его изменения, вызванным изменениями режимов работы блока аналого-цифрового преобразования, периферийных устройств, то есть портов приема и выдачи информации и других внутренних устройств. Случайный характер изменения и большая величина потребляемого тока являются источниками электромагнитных помех, влияющих на датчик магнитного поля, а следовательно, снижающих точность магнитных измерений.
Техническим результатом изобретения является повышение точности магнитных измерений на подвижном объекте исключением влияния электромагнитных помех от приемо-обрабатывающего устройства магнитоизмерительного прибора.
Указанный результат достигается тем, что в предлагаемое бортовое устройство для измерения параметров магнитного поля Земли, содержащее последовательно соединенные и взаимно близко расположенные трехкомпонентный датчик магнитного поля, жестко связанный с осями объекта, и приемо-обрабатывающее устройство, расположенное в фиксированном положении на объекте, включающее коммутатор, входы которого подключены к соответствующим выходам датчика магнитного поля, последовательно соединенные блок аналого-цифрового преобразования и микроЭВМ, управляющий выход которой подключен к входу управления коммутатора, дополнительно введено аналоговое запоминающее устройство, вход которого подключен к выходу коммутатора, а выход - к входу блока аналого-цифрового преобразования, вход управления которого подключен к первому входу управления (входу управления режимом потребления) и второму управляющему выходу микроЭВМ, третий управляющий выход которой подключен к входу управления аналогового запоминающего устройства, а второй вход управления подключен к управляющему выходу блока аналого-цифрового преобразования.
Сущность предлагаемого изобретения поясняется графическими материалами. На фиг.1 изображена структурная схема бортового устройства для измерения параметров магнитного поля Земли, а на фиг.2 показаны временные диаграммы его работы.
Устройство содержит последовательно соединенные жестко связанные с объектом и взаимно близко расположенные трехкомпонентный датчик магнитного поля 1 (ДМП) и приемо-обрабатывающее устройство 2 (ПОУ), включающее последовательно соединенные коммутатор 3, аналоговое запоминающее устройство 4 (АЗУ), блок аналого-цифрового преобразования 5 (БАЦП) и микроЭВМ 6, управляющий выход которой подключен ко входу управления коммутатора 3, входы которого подключены к соответствующим выходам ДМП 1, вход управления БАЦП 5 подключен к входу управления режимом потребления и второму управляющему выходу микроЭВМ 6, третий управляющий выход которой подключен к входу управления АЗУ 4, а второй вход управления подключен к управляющему выходу БАЦП 5.
Подавление помех в предложенном устройстве основано на реализации принципа временного разделения процесса аналогового преобразования (с последующим запоминанием результата) и процессов аналого-цифрового преобразования и обработки сигналов. Причем процесс аналогового преобразования осуществляется при фиксированном потреблении тока ПОУ 2, а процессы аналого-цифрового преобразования и обработки сигналов осуществляются в рабочем режиме потребления тока этим устройством.
Устройство работает следующим образом.
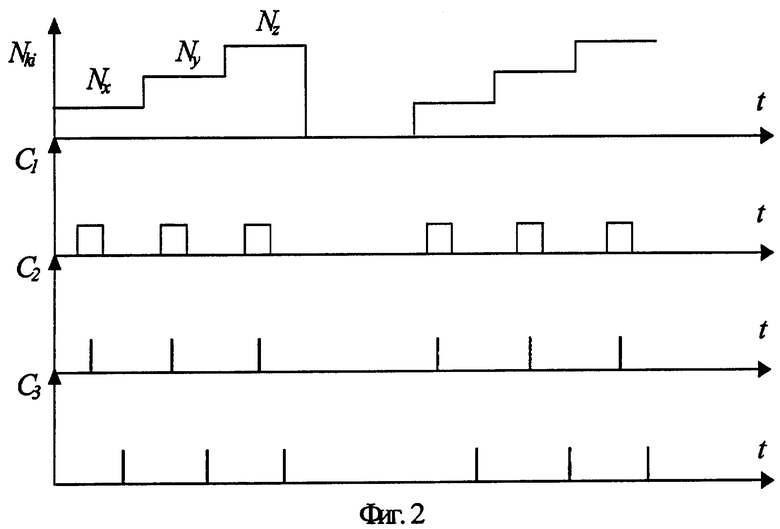
С помощью трехкомпонентного ДМП 1 осуществляется преобразование компонент Вx, Ву, Вz вектора магнитной индукции по связанным с объектом осям X, Y, Z в выходные напряжения, подаваемые на входы коммутатора 3, который пропускает их поочередно на вход АЗУ 4. Управление коммутатором 3 осуществляется последовательностью управляющих кодов Nki(i=x, у, z), формируемых в микроЭВМ 6. При этом процесс их формирования сопровождается синхронным формированием, там же в микроЭВМ, последовательности сигналов управления С1, подаваемых на входы управления БАЦП 5 и микроЭВМ 6, и сигналов управления C2, подаваемых на вход управления АЗУ 4 (фиг.2). Сигналы C1 переключают БАЦП 5 и микроЭВМ 6 в режим фиксированного или малого постоянного потребления тока, что приводит к исключению наводимых и воздействующих на ДМП 1 переменных помех от БАЦП 5 и микроЭВМ 6. В режиме фиксированного потребления тока составляющие ΔВxэ, ΔВyэ, ΔВzэ вектора магнитной индукции электромагнитной помехи, наводимой ПОУ 2, являющиеся функциями потребляемого тока (I) источника помех, можно представить скалярными выражениями в виде
ΔBxэ=fx(I)=Pэ(Io),
ΔBуэ=fу(I)=Qэ(Io),
ΔBzэ=fz(I)=Rэ(Io),
при I=Io, где Io и Рэ(Io), Qэ(Io), Rэ(Io) - постоянные значения соответственно потребляемого тока и наводимых этим током помех по связанным с объектом осям X, Y, Z. На интервалах времени присутствия сигналов C1 формируются сигналы С2, с помощью которых осуществляется запись в АЗУ 4 i-го аналогового эквивалента преобразуемой компоненты Вi вектора магнитной индукции. По окончании сигналов
С1 с моментов появления их заднего фронта БАЦП 5 и микроЭВМ 6 переходят в рабочий режим и, следовательно, в режим рабочего потребления токов. В данном режиме потребляемый ток ПОУ 2 имеет переменный и непредсказуемый характер изменения и может заметно, то есть на несколько порядков, превышать значение тока в режиме его фиксированного потребления. При этом составляющие ΔВхэ, ΔВуэ, ΔВzэ вектора магнитной индукции электромагнитной помехи, наводимой ПОУ 2, влияя на данном интервале времени на ДМП 1, тем не менее не искажают результат измерения, предварительно записанный в АЗУ 4. С моментов появления заднего фронта сигналов С1 в БАЦП 5 осуществляется преобразование хранимого в АЗУ 4 выходного напряжения в код Ni, подаваемый на вход микроЭВМ 6. Процесс окончания аналого-цифрового преобразования фиксируется в микроЭВМ 6 появлением сигнала
С3 (фиг.2) на управляющем выходе БАЦП 5. По этому сигналу в микроЭВМ 6 осуществляется запись этого кода в память по соответствующему i-му адресу, задаваемому кодом адреса, формируемому в самой микроЭВМ 6. Таким образом, в предлагаемом устройстве аналоговое преобразование компонент Вi и последующая запись выходных напряжений коммутатора 3 в АЗУ 4 сопровождаются отсутствием переменных магнитных помех от наиболее энергопотребляемых устройств, то есть от БАЦП 5 и микроЭВМ 6, обеспечиваемым режимом постоянного потребления тока в последних.
На интервалах времени отсутствия сигналов С1 (фиг.2), то есть на интервалах времени режима рабочего потребления токов БАЦП 5 и микроЭВМ 6, осуществляются процессы аналого-цифрового преобразования и последующая цифровая обработка результатов преобразования в микроЭВМ 6, происходящие при отсутствии искажений помехами, обусловленными изменяемым током потребления. Результаты преобразования компонент содержат постоянные погрешности от влияния помех, представленных вышеуказанными выражениями, вызванные влиянием постоянного тока потребления Io, которые предварительно определяются известными способами при калибровке устройства или учитываются при проведении девиационных работ на объекте, а затем записываются в память микроЭВМ 6. Эти погрешности устраняются в процессе цифровой обработки измеряемых компонент. Там же осуществляется компенсация погрешностей от влияния магнитных помех, обусловленных содержанием фиксированно распределенных ферромагнитных масс объекта и, в том числе, ферромагнитных масс ПОУ 2. По результатам измерения компонент в микроЭВМ 6 осуществляется также вычисление параметров МПЗ, функционально зависимых от измеряемых компонент, а также обмен данными с внешними потребителями через порты приема и передачи данных. Множество решаемых задач с помощью микроЭВМ 6 определяет функциональный ресурс и сложность структуры, а следовательно ее энергопотребление, которое, в свою очередь, определяет уровень наводимых помех, подлежащих подавлению.
Реализация режима фиксированного потребления БАЦП 5 осуществляется, например, установкой его в начальное («предстартовое») состояние сигналом С1. Неизменяемость этого состояния на интервалах существования сигналов C1 определяет постоянство энергопотребления на этих интервалах. В известных современных микроЭВМ или микроконтроллерах имеется возможность внешнего управления режимами потребления по специально предусмотренному для этого входу управления. В данном случае имеется также и режим микромощного потребления тока, переходом в который достижимо уменьшение потребляемого тока в микроЭВМ на несколько порядков по сравнению с рабочим режимом, а следовательно, достижимо практически полное исключение даже постоянных помех.
В предложенном устройстве возможны различные варианты исполнения схем АЗУ 4 или так называемых устройств выборки хранения, достаточно полно представленные в известной литературе, например в [9, 10].
Вариантами исполнения датчика магнитного поля являются, например, использование обоймы с тремя ортогонально ориентированными магниточувствительными элементами - феррозондами или магниторезистивными элементами. В первом варианте необходимы усилители с фильтрами для выделения четно-гармонических полезных сигналов, устанавливаемые, например, в самом датчике магнитного поля 1 [5]. В данном случае возможен также вариант их установки и в составе АЗУ 4. В варианте применения магниторезистивных элементов, выходные сигналы датчика магнитного поля 1 формируются в виде напряжений постоянного тока без модуляционного преобразования.
Таким образом, в предложенном устройстве обеспечивается высокая точность магнитных измерений при малых дополнительных аппаратных затратах. Повышается возможность моноблочного изготовления изделия, а также возможность микроминиатюризации магнитоизмерительного прибора совмещенным расположением датчика магнитного поля и приемо-обрабатывающего устройства на общей технологической подложке на основе применения интегральной технологии. Расширяется возможность применения вычислительных средств в составе моноблочного магнитометра, в значительной степени повышающих его функциональный ресурс и широкие возможности применения в технике прецизионных измерений, в частности, на малогабаритных подвижных объектах. Целесообразность применения изобретения очевидна при изготовлении портативных переносных моноблочных магнитометров с автономным питанием. Кроме того, применение изобретения на объекте со сложным блочным магнитоизмерительным оборудованием позволит обеспечить компактное его совмещенное размещение, обеспечивающее экономию места, сокращение веса и габаритов, а также исключение жгутовых и разъемных соединений.
Следовательно, предлагаемое изобретение, обладая новизной, полезностью и реализуемостью, может найти широкое применение в технике магнитных измерений.
Литература
1. Способ цифровой компенсации электромагнитной девиации для магнитного электронного компаса и устройство для его осуществления. Патент РФ №2210060, МПК 7 G01С 17/38, 2001 г.
2. Безмаятниковый магнитный компас. А.с. СССР №790917, М. Кл.3 G01С 17728, 1979 г.
3. Способ измерения магнитного курса подвижного объекта. Патент РФ №2130588, МПК 6 G01С 21/08, 1998 г.
4. Схоменко А.Н., Соборов Г.И., Линко Ю.Р. Магнитометр аналоговый МА-3 для ориентации подводного аппарата. VII Междунар. Научн.-техн. конференция «Современные методы и средства океанологических исследований». Материалы конференции. РАН НИИ специального машиностроения МГТУ им. Н.Э.Баумана. М., 2001.
5. Материалы фирмы Aplied Physics Systems. Three Axis Fluxgate Magnetometer. E-Mail: aps@appliedphysics.com/web:www, appliedphysics. Com.
6. Афанасьев Ю.В. Феррозонды. "Энергия", Ленинградское отделение, 1969.
7. Алексеев К.Б., Бебенин Г.Г. Управление космическим летательным аппаратом, "Машиностроение", 1964.
8. Способ измерения полного вектора магнитного поля, а также устройство для его осуществления. Патент РФ №2218577, МПК G01R 33/02, 2001 г.
9. П.Хоровиц, У.Хилл. Искусство схемотехники: в 2-х томах. Пер. с англ. - М.: Мир, 1983. - Т.2.
10. В.С.Гутников. Применение операционных усилителей в измерительной технике. Л.: Энергия, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОБЛОЧНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2008 |
|
RU2382376C1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2005 |
|
RU2302644C1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2020 |
|
RU2747015C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |
| Устройство для автоматического мониторинга магнитных полей | 2017 |
|
RU2643233C1 |
| Способ измерения магнитного курса подвижного объекта и устройство для его осуществления | 2017 |
|
RU2653599C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| МАГНИТНЫЙ КОМПАС | 1997 |
|
RU2126524C1 |
Изобретение относится к магнитным измерениям на подвижных объектах, в частности к приборам, предназначенным для измерения компонент и полного вектора индукции магнитного поля Земли, а также магнитному курсоуказанию и навигации на транспортных средствах. Техническим результатом изобретения является повышение точности магнитных измерений на подвижном объекте исключением влияния электромагнитных помех от приемо-обрабатывающего устройства магнитоизмерительного прибора. Устройство содержит последовательно соединенные и взаимно близко расположенные трехкомпонентный датчик магнитного поля, жестко связанный с осями объекта, и приемо-обрабатывающее устройство, расположенное в фиксированном положении на объекте, включающее последовательно соединенные коммутатор, аналоговое запоминающее устройство, блок аналого-цифрового преобразования и микроЭВМ. 2 ил.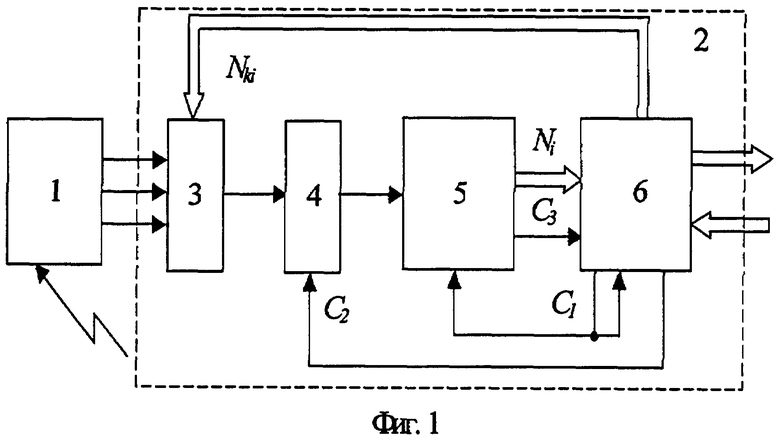
Бортовое устройство для измерения параметров магнитного поля Земли, содержащее последовательно соединенные и взаимно близко расположенные трехкомпонентный датчик магнитного поля, жестко связанный с осями объекта, и приемообрабатывающее устройство, расположенное в фиксированном положении на объекте, включающее коммутатор, первый, второй и третий входы которого подключены соответственно к первому, второму и третьему выходам датчика магнитного поля, последовательно соединенные блок аналого-цифрового преобразования и микроЭВМ, управляющий выход которой подключен ко входу управления коммутатора, отличающееся тем, что оно дополнительно снабжено аналоговым запоминающим устройством, вход которого подключен к выходу коммутатора, а выход - ко входу блока аналого-цифрового преобразования, вход управления которого подключен к первому входу управления (входу управления режимом потребления) и второму управляющему выходу микроЭВМ, третий управляющий выход которой подключен ко входу управления аналогового запоминающего устройства, а второй вход управления - к управляющему выходу блока аналого-цифрового преобразования.
| МАГНИТНЫЙ КОМПАС | 2005 |
|
RU2302615C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2236029C1 |
| СПОСОБ ЦИФРОВОЙ КОМПЕНСАЦИИ ЭЛЕКТРОМАГНИТНОЙ ДЕВИАЦИИ ДЛЯ МАГНИТНОГО ЭЛЕКТРОННОГО КОМПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210060C2 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 1998 |
|
RU2130588C1 |
| US 4539760 A, 10.09.1985. | |||

