Предлагаемое изобретение относится к космической технике и может быть использовано на космических аппаратах, находящихся на орбите искусственного спутника Земли, кроме геостационарной, стабилизируемых вращением вдоль вертикальной оси.
Наиболее близким по технической сущности следует считать космическую систему обнаружения терпящих бедствие судов и самолетов - КОС-ПАС-САРСАТ, где определение местоположения радиобуев, излучающих аварийные сигналы, обеспечивается радиально- скоростным (доплеровским дифференциальным) способом [1].
Недостатком данного прототипа является неоднозначность определения, низкая точность координат аварийного объекта, низкая помехозащищенность приемной радиолинии.
Целью предлагаемого изобретения является однозначность определения, повышения точности измерения координат аварийного объекта, находящегося на поверхности Земли, увеличение площади просматриваемой поверхности, увеличение соотношения сигнал/шум в приемной радиолинии.
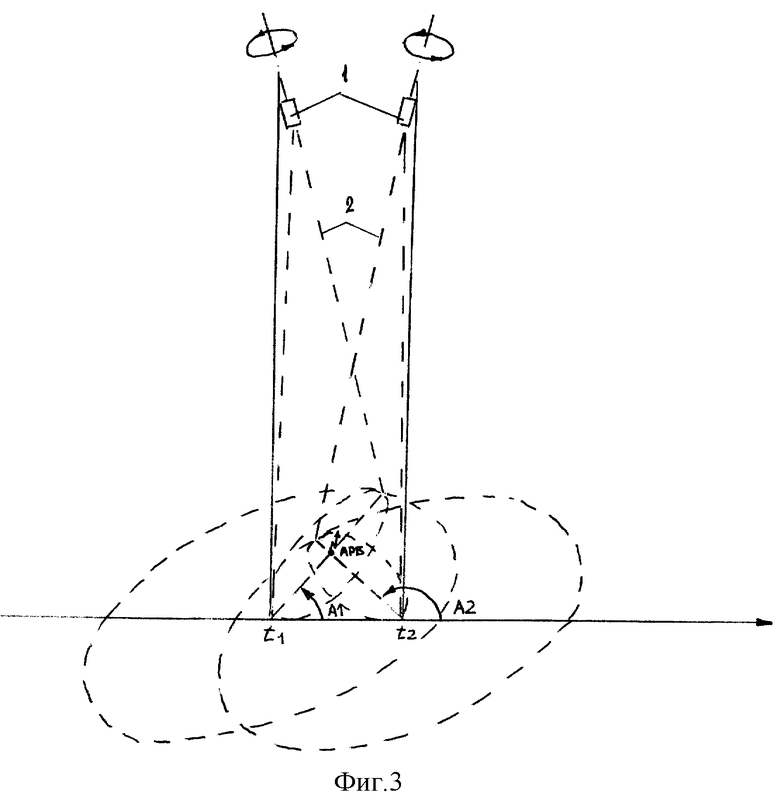
Сущность изобретения состоит в поиске такого пространственного положения приемной антенны космического аппарата, стабилизируемого вращением вдоль вертикальной оси, при наличии фактора работы передатчика аварийного объекта, когда частота Доплера принимаемого сигнала равна нулю, измерение в этот момент времени угла между механической осью приемной антенны космического аппарата и осью горизонта с привязкой измерения к бортовому временному устройству. Координата подспутниковой точки в момент измерений вычисляется. Измерения проводятся не менее двух раз. По координатам двух подспутниковых точек и двум измеренным углам между механической осью приемной антенны космического аппарата и осью горизонта определяется местоположение аварийного объекта.
Известно, что эффект Доплера состоит в том, что частота f1 сигнала, принимаемого движущимся приемником, изменяется относительно частоты f0, излучаемой неподвижным передатчиком по закону
f1 = f0 • (1 ± R/C), (1)
где R - радиальная скорость движущегося приемника;
С - скорость света.
Знак "плюс" соответствует сближению приемника и передатчика, "минус" - удалению, т.е. знак определяет направление вектора радиальной скорости. Разностная частота Fд, называемая частотой Доплера, определяется по формуле
Fд = f1 - f0 = f0 • R/C . (2)
В точке траверза частота Доплера равна нулю.
Известно использование импульсных инфракрасных датчиков горизонта [2].
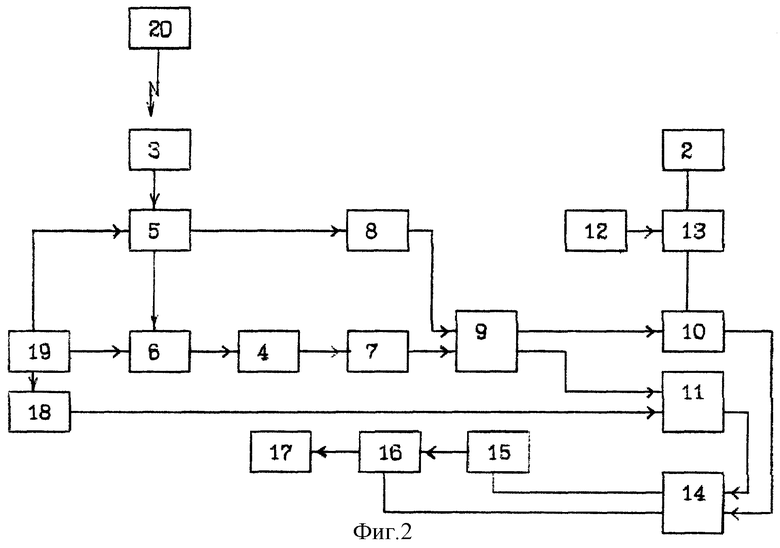
Способ осуществляется следующим образом. Поступательное движение космического аппарата, ось вращения которого отклонена от местной вертикали, состоящего из корпуса 1, импульсного инфракрасного датчика горизонта 2, размещенного на одной оси противоположно приемной антенны 3, механическая ось которой не совпадает с осью вращения космического аппарата, устройства сравнения 4, приемного устройства космического аппарата 5, измерителя частоты Доплера 6, заторможенного блокинг-генератора 7, схем "И" 8, 9, генератора импульсов 12, счетчика импульсов 13, вентилей 10, 11, схемы коммутации 14, магнитного запоминающего устройства 15, передатчика космического аппарата 16, передающей антенны 17, бортового временного устройства 18, бортового задающего генератора 19 (см. фиг. 1 - 3), обеспечивает перемещение линии сканирования диаграммы приемной антенны и последовательный просмотр полосы на поверхности Земли вдоль орбиты космического аппарата. Частота вращения космического аппарата выбирается из условия просмотра поверхности Земли без пропуска. Выбираем такую приемную антенну, чтобы ось диаграммы направленности совпадала с механической осью антенны. Для устранения неоднозначности, механическая ось приемной антенны космического аппарата сдвигается относительно оси вращения на угол β, равный ширине диаграммы направленности приемной антенны. При появлении сигнала передатчика 20 аварийного объекта в просматриваемой полосе на поверхности Земли, приемник космического аппарата 5 начинает измерение частоты Доплера беззапросным методом. При достижении частоты Доплера значения, равного нулю, механическая ось приемной антенны 3 находится в точке траверза. В этот момент измеряется значение угла между осью датчика горизонта и положением механической оси приемной антенны 3 (угла А). Измерения привязываются к бортовому временному устройству 18 и записываются в магнитное запоминающее устройство 15 или передаются через передатчик 16 на наземный приемный пункт. Для определения координат аварийного объекта необходимо измерить угол А и вычислить координаты, подспутниковой точки. По координатам двух подспутниковых точек и двум измеренным углам А однозначно определяется местоположение аварийного объекта.
Вычисление координат аварийного объекта возможно на борту космического аппарата при наличии бортовой цифровой вычислительной машины, либо на наземном приемном пункте.
В исходном состоянии до попадания сигнала с передатчика 20 аварийного объекта в диаграмму направленности приемной антенны 3 на выходе приемника 5 сигнала нет. На выходе схемы "И" 8 - нуль. Схема совпадения "И" 9 закрыта, на выходах 9 - нуль. Импульсный инфракрасный датчик горизонта 2 в момент пересечения трассы космического аппарата вырабатывает импульс, который обнуляет счетчик импульсов 13. С генератора импульсов 12 импульсы поступают на счетчик 13. Схема "И" 9 закрыта, вентили 10, 11 - закрыты.
При появлении сигнала с передатчика аварийного объекта 20 в полосе земной поверхности, просматриваемой диаграммой направленности приемной антенны 3, появляется сигнал на выходе приемника 5. На выходе схемы "И" 8 - единица. При достижении значения частоты Доплера, на выходе измерителя 6, равном нулю, открывается устройство сравнения 4 и запускается заторможенный блокинг-генератор 7, на выходах схемы 9 появляется единица. Открываются вентили 10, 11. Информация о значении угла А (количество импульсов, записанных в счетчик импульсов 13) и времени измерения записывается через схему коммутации 14 на магнитное запоминающее устройство 15. В зоне приема с наземного пункта управления космическим аппаратом информация сбрасывается с магнитного запоминающего устройства 15 через передатчик 16 и передающую антенну 17.
При срабатывании импульсного датчика горизонта 2 - система возвращается в исходное состояние.
Таким образом, по сравнению с прототипом, данный способ позволяет однозначно определить координаты, сократить время поиска аварийного объекта, увеличить площадь просматриваемой поверхности Земли за счет сканирования приемной диаграммы направленности, увеличить соотношение сигнал/шум с приемной радиолинии за счет использования приемных антенн с узкой диаграммой направленности.
Источники информации
1. Р. А. Скубко и др. Спутник у штурвала. - Л.: Судостроение, 1989, с. 168.
2. А. А.Алатырцев и др. Инженерный справочник по космической технике. - М.: Воениздат, 1977, с. 409.
| название | год | авторы | номер документа |
|---|---|---|---|
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2313477C1 |
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОППЛЕРОВСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2007 |
|
RU2328416C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2329921C2 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2305057C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОПЛЕРОВСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2008 |
|
RU2368550C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО ДИАПАЗОНА ПРИЕМНИКА АППАРАТУРЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 1996 |
|
RU2120644C1 |
| РЕГИОНАЛЬНАЯ СИСТЕМА МОБИЛЬНОЙ СПУТНИКОВОЙ СВЯЗИ И ОБСЛУЖИВАНИЯ ТРАНСПОРТНЫХ КОРИДОРОВ | 2005 |
|
RU2322760C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2019 |
|
RU2734108C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
Изобретение относится к космической технике и может быть использовано на искусственных спутниках Земли, стабилизируемых вращением вдоль вертикали. Согласно изобретению производят поиск такого пространственного положения приемной антенны спутника при наличии факта работы передатчика аварийного объекта, когда частота Доплера принимаемого сигнала равна нулю. В этот момент измеряют угол между осью приемной антенны и осью датчика горизонта. Координаты подспутниковой точки трассы космического аппарата в момент измерения вычисляются. Измерения проводят два раза. По координатам двух подспутниковых точек и двум измерениям указанного угла определяют местоположение аварийного объекта. Изобретение направлено на обеспечение однозначности определения и повышение точности вычисления координат аварийного объекта, находящегося на поверхности Земли, а также на расширение площади просматриваемой поверхности и увеличение отношения сигнал/шум в приемной радиолинии. 3 ил.
Угломестно-временной доплеровский способ определения координат аварийного объекта, находящегося на поверхности Земли, с помощью космического аппарата, стабилизируемого вращением вдоль вертикальной оси, заключающийся в том, что при появлении сигнала передатчика аварийного объекта на просматриваемой с космического аппарата полосе на поверхности Земли измеряют частоту Доплера беззапросным методом, отличающийся тем, что для однозначного определения и повышения точности измерения координат аварийного объекта, а также увеличения отношения сигнал/шум приемной антенны находят пространственное положение космического аппарата в момент, когда частота Доплера принимаемого сигнала равна нулю, измеряют в этот момент времени угол между механической осью приемной антенны космического аппарата и осью датчика горизонта с привязкой измерения к бортовому времени, вычисляют координаты подспутниковой точки в момент указанного измерения, причем измерения проводят два раза и по координатам двух подспутниковых точек и двум измерениям угла между механической осью приемной антенны космического аппарата и осью датчика горизонта определяют местоположение аварийного объекта на поверхности Земли.
| Р.А.СКУБКО и др | |||
| Спутник у штурвала | |||
| - Л.: Судостроение, 1989, с.168 | |||
| Инженерный справочник по космической технике | |||
| / Под ред.А.В.СОЛОДОВА | |||
| - М.: Воениздат, 1977, с.409 | |||
| СПОСОБ ПРИЕМА СИГНАЛОВ С УГЛОВОЙ МОДУЛЯЦИЕЙ | 1990 |
|
RU2040860C1 |
| RU 2059423 C1, 10.05.1996. | |||
