Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в системах управления технологическим процессом железнодорожной станции.
Известны системы автоматизированного управления станцией АСУ СТ, предусматривающие планирование поездной работы, поездообразования и маневровой работы, грузовой и коммерческой работы, работы локомотивов и локомотивных бригад, подготовки вагонов к погрузке, оперативно - статистический учет показателей работы. Системы позволяют повысить производительность труда на станции за счет автоматизации операций планирования основных производственных процессов, но, из-за использования схематических моделей путевого развития, включающих только пути парков, и большого количества операций «ручного» ввода информации, ограничиваются выработкой рекомендаций работникам железной дороги по управлению технологическим процессом станции и документированием отдельных операций.
Известна интеллектуальная система управления железнодорожным транспортом ИСУЖТ, предусматривающая оптимизацию планирования пропуска поездов, обеспечения их локомотивной тягой с учетом задач полигона, включающего станцию, на основе современных цифровых моделей технологического процесса, работающих, преимущественно, на основе автоматического сбора информации (Матюхин В.Г., Уманский В.И., Шабунин А.Б. О текущем состоянии проекта ИСУЖТ и реализации технологии интервального регулирования на его платформе, Труды восьмой научно-технической конференции интеллектуальные системы управления на железнодорожном транспорте. Компьютерное и математическое моделирование (ИСУЖТ-2019), Москва, 21 ноября 2019).
Однако аппаратно-программный комплекс системы не предусматривает непосредственное управление устройствами автоматики и телемеханики, обеспечивающими задание и замыкание маршрутов движения подвижных единиц, а также тяговым подвижным составом.
Известна комплексная система автоматизации управления сортировочным процессом КСАУ СП, предусматривающая управление горочными стрелочными приводами, вагонными замедлителями и компрессорной станцией, действие которой ограничено только роспуском составов, а очередность роспусков, специализация путей, маневровые операции по надвигу, осаживанию и перестановке вагонов осуществляются внешними системами или работниками железной дороги (Комплексная система автоматизации сортировочного процесса (КСАУ СП) – общие сведения, http://scbist.com/stati-po-scb/2345-statya-kompleksnaya-sistema-avtomatizacii-sortirovochnogo-processa-ksau-sp-obschie-svedeniya.html, 03.06.2010).
Известен способ обеспечения безопасности движения поезда, маневрового состава или одиночного локомотива по станции и на подходе к ней, в котором управление движением локомотива при маневровой работе осуществляется путем задания маршрута, передачи его с управляющей информацией на локомотив, реализации и контроля маршрута следования (RU2352487 С1, B61L 3/12, 27/00).
Недостатком известного способа является возможность нарушения безопасности маневровых работ по причине влияния «человеческого фактора», т.к. контроль реализации маршрута возлагается на дежурных по станции. Кроме того, наличие на табло машиниста графического интерфейса со схемой станции отвлекает машиниста от управления локомотивом и наблюдения за маршрутом, что также является угрозой безопасности движения.
Наиболее близким аналогом является способ управления движением локомотивов при маневровой работе, заключающийся в том, что аппаратно-программный комплекс станционного оборудования в режиме реального времени с помощью устройств микропроцессорной централизации осуществляет мониторинг объектов, влияющих на условия движения на станции, аппаратно-программный комплекс бортового оборудования каждого маневрового локомотива на основе данных локомотивных приемников спутниковой навигации с учетом поправки станционной дифференциальной станции определяет координаты его местоположения и передает их на аппаратно-программный комплекс станционного оборудования, который по результатам мониторинга и данных о местоположении маневровых локомотивов формирует динамическую модель размещения подвижных единиц на станции путем фиксации в режиме реального времени на цифровой модели путевого развития станции, содержащей нормативные данные о станции с описанием координат и параметров входящих в нее объектов, влияющих на условия движения, состояния участков и стрелок, местоположения локомотивов на путях станции согласно их координатам, а также состояния «виртуальных сигналов» для каждого изолирующего стыка в четном и нечетном направлении, предусмотренных конфигурацией микропроцессорной централизации для задания начала и окончания маршрута, устанавливает соответствие между маршрутами, задаваемыми микропроцессорной централизацией, и локомотивами, участвующими в маневровом процессе, на основе динамической модели определяет для каждого локомотива зоны допустимого перемещения в четном и нечетном направлениях, с учетом которых формирует телеграмму, содержащую маршрутное задание, включающее наименование границ маршрута в четном и нечетном направлениях, описание всех элементов маршрута и значения допустимых скоростей перемещения по каждому, а также команды дежурного по станции, задающие условия движения, и передает ее по радиоканалу передачи данных на аппаратно-программный комплекс бортового оборудования локомотива, который на основании полученных данных определяет параметры маршрута и текущую величину допустимой скорости движения, отображает их на мониторе машиниста, а также рассчитывает траекторию движения с учетом положения локомотива в маневровом составе, при этом реализацию и контроль траектории движения маневрового локомотива или состава по заданному маршруту обеспечивают посредством обмена информацией между аппаратно-программными комплексами бортового и станционного оборудования об изменениях координаты, скорости и о факторах, влияющих на условия движения по маршруту (RU2567099 С1, B61L 27/04, 2006.01).
К недостаткам известного способа относятся исключение из контура управления поездных локомотивов, ориентированность на «ручное задание» маршрутов движения и «ручной» ввод предупреждений об ограничении скорости движения, что снижает эффективность управления из-за негативного влияния «человеческого фактора».
Кроме того, несогласованность протоколов обмена, различие моделей используемых для управления и планирования технологического процесса, а также отсутствие синхронизации потоков данных и команд управления с ходом техпроцесса в известных системах и способах автоматизации и оптимизации технологических операций не позволяют реализовать работу станции в автоматическом режиме управления движением с учетом заданных требований по безопасности движения и эффективности управления.
Технический результат предлагаемого изобретения заключается в обеспечении безопасности движения, охраны труда и повышении эффективности управления технологическим процессом за счет автоматического режима работы станции, включая организацию поездной и маневровой работы, управление движением локомотивов и другим тяговым подвижным составом, без локомотивных бригад, грузовой и коммерческой работы на основе малолюдных технологий и электронного документооборота, подготовки подвижного состава и технических средств инфраструктуры по данным предиктивной аналитики и диагностики, согласования технологического процесса станции с задачами полигона железной дороги, направления, автоматического расчета показателей станции, причастных линейных предприятий и исполнителей, технического нормирования, планирования капитальных ремонтов напольных устройств по суммарной нагрузке и передача результатов управления системам регионального и сетевого уровня, оптимизации управления технологическим процессом станции путем замены директивных решений на автоматическое оперативное планирование на основе предиктивной аналитики, исключения «человеческого фактора» из показателей, влияющих на безопасность движения и эффективность производственного процесса, сокращения времени выполнения технологических операций, межоперационных интервалов, простоев вагонов и локомотивов на станции, поездов на подходах к станции за счет сокращения длин маневровых маршрутов, совмещении поездных и маневровых операций в горловинах станции, исключения ограничений по скорости обусловленных климатическими условиями и порядком движения состава, регламента переговоров и зонной системы управления движением, а также потерь времени на смену локомотивных бригад.
Технический результат достигается тем, что способ управления технологическим процессом железнодорожной станции заключается в том, что на станции центр управления и контроля в режиме реального времени взаимодействует с аппаратно-программными устройствами системы микропроцессорной централизации и комплексной системы автоматизации управления сортировочным процессом, системы управления движением тягового подвижного состава, систем сетевого уровня управления, системы опробования тормозов грузовых составов, системы технического обслуживания грузовых вагонов, коммерческого осмотра поездов и вагонов, системы видеонаблюдения, системы оповещения, автоматизированной системы выдачи и отмены предупреждений, а также с аппаратно-программными устройствами автоматизированных рабочих мест линейных предприятий, участвующих в технологическом процессе, и с носимыми терминалами исполнителей технологических операций на станции, по результатам взаимодействия в режиме реального времени автоматически формирует динамическую модель технологического процесса на базе цифровой модели станции с данными на текущей момент времени о состоянии устройств автоматики и телемеханики, о местоположении и параметрах движения подвижных единиц, о дислокации исполнителей, о параметрах входного потока подвижных единиц на станцию, о номерах прибывающего подвижного состава, техническом состоянии его вагонов, креплении и сохранности грузов, о начале, окончании и выполнении технологических операций, на основе информации о подходе поездов к станции, планов расформирования и формирования грузовых поездов, расписания движения пассажирских и пригородных поездов формирует суточный план-график работы станции и согласовывает его с линейными предприятиями, участвующими в технологическом процессе, которые по кругу ведения для выполнения каждой технологической операции суточного план-графика осуществляют привязку исполнителей с указанием для тяговых подвижных единиц – идентификационных номеров бортовых систем управления тяговых подвижных единиц, для локомотивных бригад – идентификационных номеров электронных систем регистрации, для остальных исполнителей, обслуживающих движение, осуществляющих профилактику и ремонт инфраструктуры станции – идентификационных номеров индивидуальных носимых ими терминалов, на основе суточного план-графика с учетом информации о текущих параметрах модели технологического процесса, обновляемых норм технического нормирования для станции и прогноза на заданный период времени подхода поездов и вагонов центр управления и контроля формирует оперативный предварительный план-график работы станции, детализируя его на имитационной модели до, не менее трех, вариантов адресных наряд-заданий тяговым подвижным единицам и прикрепленным исполнителям линейных предприятий, а также наряд-заданий исполнителям для выполнения технологических операций по подготовке подвижных единиц к переработке и отправлению и передает его в аппаратно-программное устройство автоматизированного рабочего места станционного диспетчера одновременно с динамической моделью технологического процесса, на основе информации о текущих параметрах модели технологического процесса станционный диспетчер выбирает оптимальный вариант выполнения наряд-заданий и посредством аппаратно-программного устройства направляет в центр управления и контроля, который с упреждением выполнения передает наряд-задания через устройство межсетевого ввода-вывода, осуществляющего безопасное шлюзование информации, для реализации и контроля аппаратно-программным устройствам системы микропроцессорной централизации, комплексной системы автоматизации управления сортировочным процессом, системы управления движением тягового подвижного состава, а также носимым терминалам исполнителей, участвующих в технологическом процессе, при этом система микропроцессорной централизации в соответствии с наряд-заданиями автоматически задает не противоречащие требованиям безопасности движения поездные и маневровые маршруты синхронно с ходом выполнения технологического процесса на станции и/или по командам систем внешнего управления, комплексная система автоматизации управления сортировочным процессом в соответствии с наряд-заданием в автоматическом режиме осуществляет задание и замыкание маневровых маршрутов движения, а также реализует программу и очередность роспуска составов, система управления движением тягового подвижного состава формирует допустимые зоны перемещения и скоростные режимы тяговых подвижных единиц, контролирует путем обмена информацией по каналу радиосвязи с бортовыми устройствами управления тяговых подвижных единиц и с носимыми терминалами исполнителей выполнение и возможность продвижения наряд-заданий с соблюдением технологии работ, безопасности движения, охраны труда и здоровья пассажиров и исполнителей, причем по результатам выполнения оперативного план-графика центр управления и контроля в режиме реального времени автоматически обновляет данные динамической модели технологического процесса, с учетом текущих параметров технологического процесса осуществляет техническое нормирование станции, а также формирует план работы по техническому обслуживанию и ремонту подвижных единиц и объектов инфраструктуры станции по фактическому состоянию.
По данным модели технологического процесса центр управления и контроля формирует протоколы работы технических средств системы микропроцессорной централизации, комплексной системы автоматизации управления сортировочным процессом, системы управления движением тягового подвижного состава, системы опробования тормозов грузовых составов, системы технического обслуживания грузовых вагонов, коммерческого осмотра поездов и вагонов, системы видеонаблюдения, системы оповещения, системы передачи данных и системы цифровой радиосвязи, сформированные протоколы передает по каналу передачи данных аппаратно-программным устройствам автоматизированных рабочих мест линейных предприятий по кругу ведения.
Кроме того, на основе динамической модели технологического процесса центр управления и контроля формирует протоколы работы станции, локомотивных бригад и исполнителей, которые передает по каналу передачи данных аппаратно-программным устройствам автоматизированных рабочих мест линейных предприятий по кругу ведения.
При этом системы технического обслуживания грузовых вагонов, коммерческого осмотра поездов и вагонов дополнительно включают аппаратно-программные устройства интегрированных постов автоматизированного приема коммерческого и технического осмотра и диагностики подвижного состава и считывания номеров вагонов, установленные на границах станции, и пункты коммерческого и технического осмотра, которые по каналу радиосвязи связаны с носимыми терминалами исполнителей - осмотрщиков и приемосдатчиков.
Система управления движением тягового подвижного состава в соответствии с наряд-заданием реализует технологию маневровой автоматической локомотивной сигнализации с функциями автоматического регулирования скорости, управления прожекторами, звуковыми сигналами и автосцепками без машиниста для поездных и маневровых локомотивов, электропоездов и самоходного специализированного подвижного состава.
Система управления движением тягового подвижного состава передает исполнителю функции управления привязанной тяговой подвижной единицей для выполнения операций, предусмотренных наряд-заданиями, с соблюдением требований безопасности движения и охраны труда, контролирует выполнение операции управления, а после исполнения передает на носимый терминал исполнителя соответствующее сообщения и переключает управление тяговой подвижной единицей на себя.
Контроль перемещения тяговых подвижных единиц система управления движением тягового подвижного состава осуществляет по данным навигационной системы, системы видеонаблюдения, системы микропроцессорной централизации и комплексной системы автоматизации управления сортировочным процессом, а контроль перемещения исполнителей – по данным навигационной системы и системы видеонаблюдения.
Система управления движением тягового подвижного состава с учетом данных автоматизированной системы выдачи и отмены предупреждений, корректирует скоростные режимы тяговых подвижных единиц, данные о которых передает в их бортовые устройства управления, при этом передает на носимые терминалы исполнителей, находящихся в зоне движения, а также - в систему оповещения сообщение о приближении подвижной единицы.
Носимый терминал выполнен в виде смартфона с возможностью закрепления на одежде исполнителя и снабжен приемником навигационных сигналов, наушником и микрофоном, а также манипулятором для управления скоростью тяговой подвижной единицы и датчиками падения и состояния здоровья исполнителя.
Для реализации предлагаемого способа управления технологическим процессом железнодорожной станции необходимо наличие на станции следующей инфраструктуры:
- постов ППСС для считывания и контроля технического и коммерческого состояния подвижных единиц, установленных во входной и выходной горловинах станции или сортировочных систем;
- аппаратуры автоматизированной системы опробования тормозов АС ОПТ (УЗОТ), установленной в приемо-отправочных и сортировочных парках станции;
- аппаратуры автоматизированной системы выдачи и отмены предупреждений (АСУВОП);
- системы видеонаблюдения на путях и парках станции с возможностью распознавания образов для обнаружения препятствий на маршрутах движения и контроля несанкционированного проникновения на станционную территорию, слежения за перемещениями подвижной единицы (ПЕ) и людей по территории контролируемого объекта;
- системы оповещения на станции для адресного информирования пассажиров и работников станции о перемещениях подвижных единиц, прибытии и отправлении поездов;
- резервируемой системой цифровой радиосвязи СЦР, выполненной с использованием широкополосной системы передачи данных для управления тяговым подвижным составом и информационного обмена с работниками линейных предприятий и охраны, оснащенных носимыми терминалами на территории станции, участках приближения и путях необщего пользования;
- системы микропроцессорной централизации (МПЦ) горизонтальных парков станции с виртуальными светофорами четного и нечетного направления, устанавливаемыми в створе с каждым изолирующим стыком, кроме входных светофоров на границе станции, и накопителем маршрутных заданий, позволяющей автоматически задавать любые поездные и маневровые маршруты, в том числе на занятую стрелку, не противоречащие требованиям безопасности движения, синхронно с ходом технологического процесса и, одновременно, минимизирующей объем и капиталоемкость напольного оборудования, длину и продолжительность полурейсов, а также межоперационные интервалы между ними, взаимодействующей с устройствами контроля схода подвижного состава (УКСПС), стационарными устройствами закрепления составов (УТС) и автоматической переездной сигнализацией (АПС) на станционных переездах;
- комплексной системы автоматизации управления сортировочным процессом (КСАУ СП) на сортировочных горках, дополненной функцией автоматического задания и замыкания маневровых маршрутов движения, ограниченных виртуальными маневровыми светофорами, при этом виртуальные светофоры размещают на спускной части сортировочной горки в створе с горочными светофорами для задания маршрута выезда на пути надвига и для ограждения горочных вагонных замедлителей с двух сторон, а парковых - со стороны сортировочного парка, на горочных стрелочных участках виртуальные маневровые светофоры устанавливают со стороны вершины горки в четном и нечетном направлении, а на последних стрелках - только со стороны вершины горки, разрешающие выезд с путей сортировочного парка, программу и очередность роспуска составов, а также маневровые маршруты задают автоматически по наряд-заданиям центра управления (ЦУ), закрепление составов на путях сортировочного парка обеспечивают балочные заграждающие устройства с дистанционным управлением (БЗУ ДУ).
- системы управления движением тягового подвижного состава (СУДТПС) на станции, на участках приближения и примыкающих путях необщего пользования, включающей станционное устройство, взаимодействующее через систему цифровой радиосвязи (СЦР) с бортовой аппаратурой тяговой подвижной единицы (ТПЕ), станционное устройство реализует технологию маневровой автоматической локомотивной сигнализации для поездных и маневровых локомотивов и самоходного специализированного подвижного состава (ССПС) на территории станции и примыкающих путях необщего пользования по наряд-заданиям ЦУ для ТПЕ;
- оборудование поездных локомотивов и электропоездов системой обеспечения безопасности движения БЛОК М, в которую интегрированы функции бортовой аппаратуры МАЛС - БЛОК И, оборудование маневровых локомотивов и ССПС аналогично поездным локомотивам или бортовой аппаратурой МАЛС и микропроцессорным дешифратором ДКСВ-М, оснащение локомотивов системами автоматического регулирования скорости движения САР с возможностью управления без участия машиниста, включая устройства управления прожекторами, звуковыми сигналами и автосцепками, а также датчиками приближения, установленными на буферных брусьях локомотива (переднем и заднем).
- центра управления технологическим процессом станции (ЦУ), реализованным на базе платформы ИСУЖТ, формирующего суточный и оперативный (на 1- 2ч.) план-графики работы станции, причем последний детализируется до наряд-заданий для тяговых подвижных единиц и исполнителей, обеспечивающих операции с вагонами и обслуживание инфраструктуры, при этом информационной платформой функционирования ЦУ является модель технологического процесса, автоматически формируемая на базе цифровой модели путевого развития станции путем введения в режиме реального времени следующих данных:
- о состоянии устройств автоматики и телемеханики систем централизации СЦ (МПЦ и КСАУ СП);
- о дислокации и параметрах движения подвижных единиц и дислокации исполнителей, определяемых системой управления тяговым подвижным составом (СУДТПС);
- информацией о параметрах входного потока подвижных единиц на станцию по данным систем сетевого уровня управления - ГИД «Урал» и АСОУП;
- информацией о номерах прибывающего подвижного состава, техническом состоянии вагонов, креплении и сохранности грузов определяемых при проследовании участка оборудованного аппаратурой ППСС, а также техническом и коммерческом осмотрах работниками ПТО и ПКО;
- о предупреждениях, передаваемых АСУВОП;
- о результатах выполнения технологических операций, операций по обслуживанию технических средств и охране объектов инфраструктуры работниками причастных линейных предприятий;
- о идентификационных номерах ТПЕ и исполнителей линейных предприятий, участвующих в технологическом процессе железнодорожной станции, обслуживании и охране инфраструктуры и подвижного состава: ЭЧ – дистанцию электроснабжения, хозяйства станции (ДС), в том числе ПКО – пункт коммерческого осмотра, ТЧЭ – эксплуатационное локомотивное депо, ТРПУ – участок по ремонту локомотивных устройств безопасности, СЛД – сервисное локомотивное депо, ВЧДЭ – эксплуатационное вагонного депо, ПТО – пункт технического осмотра вагонов, ШЧ – дистанцию сигнализации, централизации и блокировки, ПЧ – дистанцию пути, РЦС – региональный центр связи, отряд ФГП ВОЖДТ – отряд военизированной охраны.
Первичная информация о входном потоке на станцию поступает в виде телеграмм-натурных листов (ТГНЛ) со станций примыкания по каналам АСОУП, уточняемых по результатам списывания номеров вагонов на входах средствами ППСС. Дополнительные данные предоставляют линейные предприятия, отвечающие за ремонт, подготовку и грузовые операции с ПЕ. По данным ТГНЛ и ППСС ЦУ определяет инвентарный номер вагона и вес брутто, а по номеру вагона (из нормативной базы вагонов) - его геометрические размеры. Эти данные позволяют контролировать перемещение каждого вагона на станции, обеспечивать любое перемещение вагонов объективной информацией о длине и весе подвижной единицы, как суммы соответствующих параметров, входящих в нее вагонов и локомотива.
СУДТПС на основе данных о параметрах подвижной единицы ПЕ и ее маршруте рассчитывает тормозную кривую, контролирует моменты освобождения и занятия изолированных участков, заполнение путей парков станции, соответствие заданного и фактического состава маневровой группы и правильность функционирования напольных устройств систем централизации. ЦУ нарастающим итогом рассчитывает суммарную нагрузку каждого участка пути или стрелочного перевода на станции для определения сроков и объемов проведения работ по капитальному ремонту пути, стрелочных переводов и других устройств. Перечисленные показатели обеспечивают оптимизацию процессов управления и контроля выполнения технологических операций, безопасность движения и живучесть системы управления, а также высокую степень обнаружения и исправления отказов аппаратно программных средств и устройств системы управления, ошибок оперативного и эксплуатационного персонала участвующего в технологическом процессе. Например, взаимодействие систем МПЦ и СУДТПС позволяет в автоматическом режиме задавать и реализовывать, часто применяемый в маневровой работе маршрут за стрелку. Для этого СУДТПС сначала формирует и задает МПЦ маршрут до светофора, отстоящего на расстояние не менее длины маневрового состава от границы искомого стрелочного участка по маршруту движения, а после освобождения стрелочного участка останавливает состав.
ЦУ в соответствии с планом формирования грузовых поездов и расписанием движения пассажирских и пригородных поездов, подготавливает нормативный суточный план-график работы станции и рассылает его по сети передачи данных причастным линейным предприятиям для согласования. Линейные предприятия, по кругу ведения, прикрепляют к план-графику локомотивы или другие тяговые подвижные единицы ТПЕ, локомотивные бригады (при необходимости), составителей поездов, сигналистов, осмотрщиков и другой персонал. В качестве идентификаторов использует для технических средств - инвентарные номера ТПЕ, для локомотивных бригад - номера индивидуальных носимых электронных систем регистрации, а для остальных исполнителей – номера индивидуальных носимых терминалов.
Инфраструктурные линейные предприятия (ШЧ, ЭЧ, ПЧ, РЦС) планируют на данный период работы, указывают индивидуальные номера терминалов исполнителей, районы и виды работ, согласовывают и вводят в АСУВОП «окна» для технического обслуживания устройств и предупреждения об ограничениях скорости с указанием места, временного интервала и исполнителей, привязанных к индивидуальным носимым терминалам. Количество и номенклатура линейных предприятий зависит от типа и класса железнодорожной станции и в общем случае является величиной переменной. Ответственные исполнители указанных линейных предприятий обязаны в течении смены поддерживать прикрепление ТПЕ, локомотивных бригад и исполнителей к план-графику, своевременно внося в него изменения. План-график с прикреплением ТПЕ и исполнителей не позже, чем за 1-2 часа до начала периода исполнения, поступает в ЦУ, отображается на терминале АРМ станционного диспетчера, вместе с текущим состоянием модели станции, а также данными ожидаемого похода поездов. После согласования станционного диспетчера суточный план-график передается ЦУ и линейным предприятиям для контроля и оперативной коррекции при необходимости.
ЦУ на основе информации о текущих параметрах модели технологического процесса, обновляемых норм технического нормирования для данной станции и прогноза (на 1час) подхода поездов и вагонов от АСОУП и ГИД Урал, формирует оперативный предварительный план-график работы станции, детализирует его на имитационной модели, построенной на базе известной технологии АС ТРА, до уровня не менее трех вариантов последовательного выполнения адресных наряд-заданий ТПЕ и прикрепленными работниками линейных предприятий железной дороги, по критериям, заданным станционным или поездным (по телефонной связи) диспетчером, или формируемым платформой ИСУЖТ и в графическом виде представляет станционному диспетчеру. Согласованный станционным диспетчером вариант оперативного графика принимается ЦУ для управления и контроля технологическим процессом, совместно с наряд-заданиями исполнителей не участвующих непосредственно в управлении ТПЕ. Наряд-задания ТПЕ и исполнителей участвующих в управлении ими ЦУ синхронно с ходом технологического процесса передает из накопителя ЦУ, через устройство межсетевого взаимодействия, в СУДТПС.
Наряд-задание тяговой подвижной единице, содержит ее инвентарный номер, маршрутное задание, включая тип маршрута (поездной/маневровый) и порядок движения (локомотивом/вагонами вперед), пономерной список вагонов (при наличии), длину подвижной единицы в метрах, вес брутто в тоннах и особые признаки, накладывающие ограничения на скорость движения, например тормозная магистраль замкнута/разомкнута (локомотивная тормозная система объединена с вагонной/локомотивная тормозная система разъединена с вагонной), предупреждения, а также назначение операций и номер терминала внешнего исполнителя при необходимости. Назначение операций содержит название операции, которую должна выполнить тяговая подвижная единица по завершении маршрута. Например, для транзитного поезда, следующего без остановки – транзит, с остановкой – остановка, с остановкой и заменой локомотива или для поезда с переработкой – закрепление состава/отцепка, для локомотива: остановка, прицепка, закрепление/отцепка, прицепка/отцепка ХХХ вагонов на ХХХ пути парка ХХ или их комбинации. Пономерной список вагонов из оперативного план-графика вводится в динамическую модель технологического процесса по окончании операции для пономерного учета накопления вагонов.
При выполнении маневровых операций с сопровождением составителя, операций по закреплению/снятию закрепления, прицепок или отцепок вагонов, опробованию тормозов, требующих передачу управления ТПЕ без локомотивной бригады работнику станции (сигналисту, составителю, осмотрщику) индивидуальный номер исполнителя передается в составе наряд-задания. ТПЕ с локомотивной бригадой непосредственное управление со стороны внешнего исполнителя заменяется отдачей команды с носимого терминала, отображаемой на локомотивном индикаторе и воспроизводимой речевым информатором бортовой аппаратуры локомотива.
Наряд-задание на выполнение операций, не связанных с движением ТПЕ, например, технический и коммерческий осмотры, ремонт объектов инфраструктуры и т.п., задает ЦУ, и включает название и место выполнения операции, а также индивидуальные номера носимых терминалов исполнителей.
Исполнители, участвующие в непосредственном управлении ТПЕ без локомотивной бригады с помощью носимого терминала совмещают свои традиционные обязанности с функциями дистанционного управления локомотивом. При этом обеспечивается повышение производительности труда и одновременно сохранность вагонов, грузов и охрана труда, за счет исключения случаев неприема или неправильного восприятия команды, несогласованности действий машиниста и составителя, сигналиста, осмотрщика.
Носимый терминал выполнен в виде смартфона, закрепленного, например, на руке исполнителя так, чтобы ладони были свободны и дополнен наушником и микрофоном, соединенным с терминалом по беспроводной сети типа Bluetooth для передачи и получения речевых команд. У составителей поездов для выполнения служебных обязанностей прибор имеет манипулятор, закрепленный на груди, с клавишами: «вперед», «назад», «стой плавно» и «стой экстренно», имеющими мануальные признаки для управления локомотивом с подножки вагона без визуального контроля. Основным экраном и клавиатурой носимого терминала исполнитель может пользоваться только в стационарном положении, располагаясь на поле, тормозной площадке вагона или локомотива.
Все носимые терминалы оборудуются навигационными приемниками для контроля местоположения и перемещений исполнителей, а также датчиками состояния исполнителя, которые реагируют на падения и критическое состояние здоровья исполнителя в режиме управления ТПЕ - подачей команды экстренной остановки ТПЕ и сообщения о предоставлении помощи в случаях отсутствия ответа от исполнителя.
Наряд-задание для управления ТПЕ на поездных маршрутах с остановкой у светофора физического или виртуального без назначения выполняется автоматически по командам СУДТПС. Наряд-задания исполнителям, участвующим в управлении ТПЕ, как правило, имеет две составляющие:
- уведомление от ЦУ о выполнении операции, передаваемое с упреждением необходимым для прибытия исполнителя к месту проведения операции;
- команду на выполнение операции, которая поступает из СУДТПС, после прибытия исполнителя к месту работы и доклада о готовности, и предусматривает передачу ему управления ТПЕ, с проверкой его местоположения.
СУДТПС отвечает за результат выполнения операции, безопасность движения и охрану труда исполнителя. Наряд-задания исполнителям не участвующим в процессе управления ТПЕ (для ПТО, ПКО, АС ОПТ) формируются ЦУ в части уведомления исполнителя, информационного сопровождения выполнения операции и подтверждения выполнения.
Наряд-задание приема на станцию поезда со сменой локомотива или переработкой содержит идентификаторы ТПЕ и исполнителя, параметры маршрута и скоростного режима и назначение: коды операций по закреплению состава и отцепки локомотива от состава. При выполнении наряд-задания ЦУ предварительно передает на носимый терминал сигналиста команды на закрепление состава и отцепку локомотива на ХХХ пути парка ХХ, а СУДТПС наряд-задание для ТПЕ о маршруте прибытия, выполняемых операциях и исполнителе в полном объеме.
Станционные устройства СУ СУДТПС рассчитывают маршрутное задание ТПЕ с остановкой первой оси вагонов у устройства закрепления УТС, координаты которого указаны в модели технологического процесса реального времени. Бортовая аппаратура БА ТПЕ на основе данных маршрутного задания вычисляет тормозную кривую, скоростной режим на маршруте и реализует их в автоматическом режиме. Сигналист, прибыв в указанный наряд-заданием район, из зоны управления УТС посылает запрос с носимого терминала на передачу управления заданной ТПЕ и активирует систему управления УТС с напольного пульта (маневровая колонка). СУ СУДТПС проверяет условия безопасности: наличие запроса от сигналиста с носимым терминалом, прикрепленным к ТПЕ наряд-заданием, расположение сигналиста в зоне УТС данного пути приема, расположение ТПЕ на пути в зоне управления с допустимой скоростью движения, активацию УТС по данным СЦ, и передают БА ТПЕ и на терминал сигналиста разрешение на управление ТПЕ с прикрепленного терминала. Сигналист, получив разрешение, переключает носимый терминал в управляющий режим. Бортовая аппаратура ТПЕ, получив разрешение и запрос от прикрепленного носимого терминала, передает на него параметры движения ТПЕ и разрешение на управление скоростью. Сигналист останавливает поезд так, чтобы первая ось первого вагона остановилась в активной зоне УТС и подает с напольного пульта команду закрепления. СЦ по команде сигналиста, проверяет положение колеса и включает механизм УТС, который накладывает и замыкает тормозной упор. Сигналист визуально фиксирует закрепление и получает сигнал напольного пульта о замыкании УТС. Такие же сигналы поступают в СУ СУДТПС от СЦ.
СУ СУДТПС передают на прикрепленный носимый терминал команду сигналисту: выполнить операцию по отцепке локомотива, которая дублируется речевым сообщением через Bluetooth. Сигналист с носимого терминала отдает команду задней автосцепке и одновременно включает тягу для отделения локомотива от состава. Сигналист контролирует отцепку локомотива от состава и сообщает СУ СУДТПС о завершении операции. Информация о выполнении операции отцепка ТПЕ от состава поступает по СЦР на СУ СУДТПС, которые контролируют выполнение команды по данным от БА ТПЕ, отображает ее выполнение на модели дислокации ПЕ и передают ЦУ. Параллельно отменяется разрешение управления ТПЕ с носимого терминала. Сигналист выводит терминал из режима управления. Если доклад от исполнителя и данные контроля СУ СУДТПС не совпадают или доклад отсутствует в течении контрольного времени, СУ СУДТПС направляет исполнителю уведомление о необходимости завершения операции и регистрирует нарушение технологии исполнителем.
Организация маневровой работы по наряд-заданиям ЦУ определяет на основе действующих инструкций. В настоящее время за безопасность движения при маневрах отвечают машинист при движении локомотивом вперед и составитель при движении вагонами вперед, который должен располагаться на подножке первого вагона. Это означает, что при использовании маневровых локомотивов без машинистов, за каждым локомотивом закрепляется составитель, который сопровождает его при выполнении любых операций.
Наряд-задание на выполнение маневровой операции с составителем включает идентификаторы ТПЕ и исполнителя, параметры маршрута и скоростного режима и назначение: взять ХХ вагонов с ХХХ пути парка ХХ или поставить ХХ вагонов на ХХХ путь парка ХХ. Для СУ СУДТПС ЦУ детализирует наряд-задание до последовательности полурейсов с назначениями составителю для каждого из них, объединенных разрешением на управление ТПЕ с носимого терминала составителя. Маршрут до пути с вагонами или до пути формирования состава в общем случае состоит из нескольких полурейсов, которые не предусматривают операции с вагонами. Составитель первоначально получает команду на выполнение маневровой операции от ЦУ, подходит к управляемому составу или ТПЕ и переключает носимый терминал в управляющий режим. СУ СУДТПС проверяют условия безопасности: наличие наряд-задания на маневровый маршрут с прикрепленным терминалом, заявки от терминала на управление, местоположение носителя терминала относительно маневрового состава, его соответствие условиям безопасного управления ТПЕ, и разрешает управление, информируя об этом БА ТПЕ и терминал составителя через СЦР. Составитель получает команду: ТПЕ № ХХХХ готов к движению и маршрут полурейса. Составитель занимает рабочую позицию на переднем вагоне маневрового состава и нажатием кнопки манипулятора разрешает движение.
Управление скоростью состава на маршруте осуществляют по командам БА ТПЕ с контролем положения и состояния составителя. Возможно продление или укорочение маршрута при изменении наряд-задания без остановки состава. Составитель информируется обо всех изменениях маршрута, скорости движения, позициях тяги и торможения речевыми командами через Bluetooth. Во время остановки составитель может сойти с состава, с помощью терминала определить его положение на изолированных участках станции и осуществить операцию подтягивания локомотива к границе участка. После получения нового задания составитель занимает рабочее положение на передней подножке состава и нажатием кнопки манипулятора разрешает движение. При выполнении полурейса на путь формирования или прицепки к составу СУ СУДТПС рассчитывают тормозную кривую с учетом остановки у стоящих вагонов по данным о заполнении пути. Составитель может отдать команду остановить маневровый состав или снизить скорость в конце маршрута нажатием кнопки манипулятора, сойти с него и последовательно, с помощью терминала, выполнить операции прицепки/закрепления/отцепки вагонов. Затем сообщить о результатах операции по СЦР СУ СУДТПС и ожидать следующего наряд-задания. При отсутствии враждебных маршрутов СУ СУДТПС может инициировать задание следующего маршрута, не дожидаясь сообщения от составителя, но команду на начало движения отдает составитель.
СУ СУДТПС контролирует выполнение наряд-задания по изменению координат и скорости движения ТПЕ, координат и команд составителя, отражает ход техпроцесса в модели технологического процесса дислокацию ПЕ и передает их ЦУ. При несовпадении доклада исполнителя с данными контроля СУ СУДТПС исполнителю направляется уведомление о необходимости завершения операции и формируется аналогичное сообщение о нарушении технологии. ЦУ отвечает за выполнение маневровых операций, контролирует выполнение наряд-задания по данным динамической модели технологического процесса и сообщениям СУ СУДТПС о нарушениях и по результатам контроля принимает решение о коррекции оперативного плана.
Для оптимизации функций управления ТПЕ с носимого терминала при выполнении операций прицепки/отцепки, закрепления/ снятия закрепления используют короткие команды исполнителя, которые он передает носимого терминала на бортовую аппаратуру управления ТПЕ. Каждая короткая команда характеризует определенную последовательность действий.
Например, на башмак вперед/назад, с башмака вперед/назад, прицепка к составу/отцепка от состава вперед/назад. Такие команды предусматривают перемещение с малой скоростью на небольшое расстояние с согласованной работой тяговых и тормозных устройств ТПЕ, переключение прожекторов, подачу звуковых сигналов, управление автосцепками ТПЕ с учетом показаний датчиков приближения и тока. Команды на начало движения и остановку, приближения к местам проведения работ, также сопровождаются звуковыми сигналами, предусмотренными действующими инструкциями на железных дорогах, и согласованным управлением тяговых и тормозных устройств локомотива. Команда остановки в общем случае осуществляется плавным снижением скорости, кроме случаев экстренного торможения, которые возникают, например, в случае нарушения скоростного режима при внезапном изменении маршрута движения или сигнала о падении, или ухудшении состояния здоровья исполнителя в режиме управления, когда остановка обеспечивается с максимальной интенсивностью. В процессе движения составитель наблюдает за свободностью и исправностью пути по ходу движения и, при необходимости, может остановить ТПЕ, используя кнопки экстренного или плавного торможения манипулятора.
Сопровождение составителем маневрового состава при перемещении вагонов обусловлено только существующими требованиями и действующими инструкциями на железных дорогах.
При движении маневровых локомотивов без локомотивных бригад функцию контроля свободности маршрута от посторонних предметов и людей осуществляет внешняя система видеонаблюдения. Составитель, находящийся в зоне выполнения операций с вагонами, по согласованию с СУ СУДТПС переключает управление ТПЕ на свой терминал, выполняет операции по прицепке/отцепке вагонов, закреплению и снятию закрепления, стоящего на пути состава и сообщает СУ СУДТПС о завершении операции, разрешая движение. СУ СУДТПС, с проверкой выполнения, переключает управление ТПЕ на себя и передает БА ТПЕ очередное задание, которое выполняется без сопровождения составителя.
В случае передачи вагонов маневрового состава в другой парк, операции по прицепке/отцепке и закреплению состава может выполнять другой составитель, работающий в данном парке в соответствии с его идентификатором указанным в наряд-задании. При выполнении каждого полурейса СУ СУДТПС обновляет информацию о заполнении пути, после ухода маневрового состава и проверяет соответствие выполненной операции наряд-заданию. Результаты операции отражаются в модели дислокации ПЕ и далее передаются в ЦУ.
Предложенная технология существенно ускоряет процесс, например, за счет исключения переходов составителя на другой конец состава при смене направления движения, повышает безопасность труда составителей, исключив движение с составом на подножке вагона, и повышает их производительность за счет обслуживания каждой горловины парка формирования одним составителем. Предлагаемый способ позволяет в наряд-задании по прицепке к вагонам в одном парке использовать номер одного составителя, а при отцепке в другом парке – другого.
В процессе выполнения любой операции по перемещению ПЕ СУ СУДТПС измеряет ее длину, как путь, пройденный от момента занятия изолированного участка до освобождения предыдущего участка на маршруте движения. Неоднократное измерение этого параметра в течении одного или нескольких полурейсов, без изменения длины состава, позволяет получить достоверную оценку длины ПЕ. Совпадение измеренной длины ПЕ с приведенной в наряд-задании с учетом длины локомотива, определяемой его типом позволяет контролировать правильность выполнения наряд-задания. В случае несовпадения составитель уведомляется СУ СУДТПС по каналам СЦР о необходимости сверки состава по переданному ранее ЦУ на носимый терминал списку номеров вагонов. По результатам сверки СУ СУДТПС, при необходимости, регистрирует в модели дислокации вагонов нарушение плана формирования и технологии исполнителем и передает сообщение в ЦУ, который корректирует оперативный план работы станции и привязанную к нему последовательность наряд-заданий.
Сопровождение составителем маневрового состава на всем протяжении маршрута сохраняется только в нецентрализованной зоне, где отсутствует информация для расчета скоростного режима движения и контроля его выполнения. Исключение составляют пути сортировочного парка и нецентрализованные пути, например, подъездные без нецентрализованных стрелочных переводов, примыкающие к централизованной зоне и ограниченные защитным участком, заполнение которых и положение ТПЕ контролируется системой контроля заполнения путей из состава КСАУ СП, показаниями бортовых датчиков пути и скорости и навигационной системой.
Границы каждой ПЕ, остановленной на централизованных путях станции, регистрируются СУ СУДТПС после завершения полурейса как две координаты, привязанные к левому изолированному стыку занимаемого участка. Одна соответствует навигационной координате локомотива с поправкой на размещение навигационной антенны, а вторая отстоит от первой на длину состава с учетом порядка движения (локомотивом/вагонами вперед) и направления движения, а также размещение антенны на локомотиве. После ухода локомотива резервом или с вагонами координата со стороны локомотива корректируется, фиксируя текущее заполнение пути. При известной по данным модели длине пути СУ СУДТПС вычисляет свободную длину впереди и позади стоящих вагонов. Данные заполнения пути используются для расчета длины маршрута на занятый путь, обеспечивая безопасность при выполнении такого маршрута, и корректируются в процессе формирования состава на этом пути.
Передача информации о заполнении путей из СУ СУДТПС в ЦУ, позволяет вести накопление в вагонах, весе и реальной длине, минимизировать случаи выхода вагонов за полезную длину пути, что, в свою очередь, приводит к оптимизации процедуры управления.
При известной длине изолированных участков, информация о которой содержится в модели, и известной длине колесной базы ПЕ (определяемой инвентарными номерами входящих в маневровый состав вагонов), ее скорости и направлении движения СУ СУДТПС прогнозирует моменты занятия и освобождения изолированных участков маршрута движения. Отклонения этих событий, поступающие из СЦ, от расчетных значений, подтвержденные несколькими измерениями подряд, являются основанием для формирования заявок в систему технической диагностики (СТДМ) для проверки работоспособности рельсовых цепей на этих участках. Кроме того, информация о времени проследования участка известной длины используется СУ СУДТПС для оценки значения средней скорости ТПЕ и сравнения ее с допустимым значением на этом участке. При угрозе безопасности движения СУ СУДТПС может изменить задание ТПЕ и снизить его скоростной режим, вплоть до принудительной остановки. БА ТПЕ по информации о моментах занятия и освобождения изолированных участков известной длины, поступающих от СУ СУДТПС по каналам СЦР, проверяет и при необходимости автоматически юстирует бортовые датчики скорости.
СУ СУДТПС регистрирует перемещения ПЕ известного веса по стрелочным и бесстрелочным участкам, обеспечивает индивидуальный учет нагрузки каждого участка, транслируя эту информацию в ЦУ для планирования обоснованных сроков и объемов капитального ремонта пути.
Горочные технологические операции по управлению надвигом и роспуском составов выполняются локомотивом без локомотивной бригады и включают заезд локомотива под состав, подтягивание/попутный надвиг/основной надвиг и роспуск состава. При возникновении нерасцепа или нештатной ситуации на спускной части горки возможны неплановые остановки роспуска или осаживание на необходимую для расцепки вагонов глубину. Программа роспуска рассчитывается ЦУ и вводится в КСАУ СП после уточнения по результатам технического и коммерческого осмотра состава. Параметры маршрута надвига горочного локомотива регистрируются и рассчитываются СУ СУДТПС, а затем вводятся в КСАУ СП в соответствии с наряд-заданием на надвиг состава для расчета переменной скорости роспуска. Дополнительный контроль за локомотивом во время выполнения горочных операций по роспуску, осаживанию или съему вагонов, неразрешенных к роспуску, осуществляет составитель, прикрепленный к горочному локомотиву наряд-заданием, выполняющий расцепку вагонов на вершине горки. В его функции входят операции: остановка роспуска, например, при нерасцепе, движение назад для осаживания состава после остановки роспуска, остановка осаживания состава и разрешение движения для продолжения роспуска. При съеме вагонов с горки составитель может, управляя локомотивом с носимого терминала, спустить нерасцепленный состав до верхней тормозной позиции и отдать команду КСАУ СП для затормаживания его в вагонных замедлителях требуемой тормозной позиции, а затем выполнить операцию отцепки вагона и вытяжку состава на пути надвига для продолжения роспуска. Скатывание оставленного в вагонном замедлителе отцепа осуществляется КСАУ СП штатным порядком или выполняется другим локомотивом под управлением составителя в соответствии с отдельным наряд-заданием. Уведомление о надвиге состава поступает на прикрепленный носимый терминал составителя от ЦУ.
Условия для переключения носимого терминала составителя в управляющий режим создаются при выходе головного вагона надвигаемого состава за виртуальный повторитель горочного светофора, с проверкой выхода составителя в зону расцепки вагонов и запроса на передачу управления, которые проверяются СУ СУДТПС. В противном случае роспуск состава останавливается у горочного светофора. Программа роспуска передается на носимый терминал из ЦУ по каналам СЦР, а длина отцепов, синхронно с ходом роспуска и результатами расцепа, отображается на указателях количества вагонов в трех смежных отцепах, устанавливаемых в зоне горба горки и управляемых КСАУ СП. Скорость горочного локомотива рассчитывается КСАУ СП по условиям разделения и вытормаживания отцепов, на основании анализа программы роспуска, заполнения путей сортировочного парка и указанных в сортировочном листе параметров и особых признаков смежных отцепов. Глубина расчета определяется суммарной длиной отцепов достаточной для снижения текущей скорости состава до минимального расчетного значения. Дополнительно при расчете скорости учитываются индивидуальные особенности плана и профиля сортировочной горки и путей надвига, условия безопасности работы составителя и возможности локомотива по реализации перепадов скоростей.
Значения заданной скорости роспуска передаются из КСАУ СП в СУ СУДТПС и далее на БА локомотива по каналам СЦР синхронно с ходом роспуска. При остановках роспуска или после осаживания скоростной режим КСАУ СП пересчитывается. По окончании роспуска команда на остановку горочного локомотива поступает с носимого терминала составителя или от СУ СУДТПС по команде от КСАУ СП об окончании роспуска.
Заезд горочного локомотива под состав состоит из двух или более полурейсов: от вершины горки за разделительную стрелку, а затем на путь, занятый подготовленным к расформированию составом, со сменой направления движения. ЦУ уведомляет сигналиста об операции по снятию закрепления на пути ХХХ парка ХХ с упреждением относительно прицепки горочного локомотива. Прикрепленный носимый терминал переводится сигналистом в режим управления ТПЕ после проверки СУ СУДТПС следующих требований безопасности: прикрепленный носимый терминал и номер локомотива соответствуют наряд-заданию, сигналист находится в зоне устройства закрепления заданного пути УТС, локомотив выполняет маршрут заезда на путь занятый данным составом, есть запрос на перевод носимого терминала в режим управления.
СУ СУДТПС рассчитывает тормозную кривую локомотива с остановкой перед последним вагоном расформировываемого состава, координата которого определяется, как удаление от УТС на длину состава и по данным о заполнении пути, на котором находится состав. Сигналист с пульта управления маневровой колонки УТС дает команду СЦ на активацию УТС, при этом МПЦ выполняет проверку замыкания УТС и наличия колеса вагона в рабочей зоне устройства. По показаниям носимого терминала, поступающим от датчиков скорости и приближения локомотива, сигналист контролирует скорость и расстояние до вагона, при необходимости останавливает локомотив перед вагоном и отдает команду вперед (назад) на прицепку к составу. Зафиксировав прицепку сигналист отдает команду назад (вперед) с башмака и проверяет по движению состава надежность прицепки. При необходимости операция повторяется. После освобождения рабочей зоны УТС колесом вагона, сигналист с напольного пульта УТС отдает команду упор снять. СЦ с проверкой ухода колеса из зоны закрепления снимает блокировку и переводит УТС в нейтральное положение. Сигналист, убедившись в переводе УТС в нейтральное положение, информирует СУ СУДТПС о завершении операции, которые проверяют достоверность события по сообщениям СЦ и БА ТПЕ, отражают его в модели дислокации и передают в ЦУ. Одновременно СУ СУДТПС отменяют режим управления ТПЕ с прикрепленного носимого терминала.
В ряде случаев, когда необходима прицепка и отцепка от состава одиночного локомотива, а закрепление состава выполнено с помощью устройств типа вагонных замедлителей или напольных устройств точечного типа, операция может быть выполнена без участия сигналиста или составителя. Прицепка в этом случае осуществляется по показаниям датчика приближения локомотива, установленного на его переднем буферном брусе по ходу движения. Сигнал датчика приближения, установленного на локомотиве со стороны вагона, о соединении с составом служит командой остановки ТПЕ. Проверка надежности прицепки выполняется при движении в противоположную сторону и считается успешной, если этот же датчик приближения не фиксирует увеличение расстояния от локомотива до ближнего вагона состава.
Отцепка локомотива осуществляется кратковременным движением в сторону состава с одновременной подачей команды на отцепку устройствам управления автосцепкой по ходу движения. Для проверки отцепки локомотив кратковременно двигается в обратную сторону. При успешной операции датчик приближения локомотива со стороны состава должен показывать удаление от вагона.
Выполнение операции осаживания вагонов в сортировочном парке при закреплении накопленного состава с помощью ручных тормозных башмаков осуществляется ТПЕ без локомотивной бригады сигналистом с помощью носимого терминала по технологии описанной выше. Если на выходе путей сортировочного парка стоит устройство закрепления типа заторможенного вагонного замедлителя огражденного путевыми датчиками или БЗУ ДУ, то процедура осаживания выполняется без сигналиста и предусматривает:
- задание маршрута на путь занятый осаживаемыми вагонами. Длину маршрута в этом случае вычисляют по данным системы контроля заполнения путей сортировочного парка (КЗП);
- прицепку локомотива к составу по показаниям датчика приближения локомотива расположенного на переднем буферном брусе по ходу движения;
- осаживание состава по пути сортировочного парка до фиксации КСАУ СП движения вагонных колес по датчикам (счетчикам осей), ограждающим устройство закрепления на данном пути;
- остановка локомотива по команде КСАУ СП, транслируемой в БА ТПЕ через СУ СУДТПС по радиоканалу;
- команда отцепки устройствам управления автосцепкой ТПЕ по ходу движения, остановку и движение назад с проверкой отцепки по датчику приближения локомотива;
- сообщение СУ СУДТПС о завершении операции.
Операция по перестановке сформированного состава из сортировочного парка в парк отправления предусматривает процедуру с участием систем КСАУ СП, СУДТПС и МПЦ в части формирования и замыкания маршрута по перестановке состава. Если на станции предусмотрена перестановка состава с замкнутой тормозной магистралью, то процедура дополняется стандартными операциями по техническому осмотру вагонов, соединению тормозных рукавов и опробованию тормозов. Эти операции выполняют по отдельным наряд-заданиям ПТО, АС ОПТ и прикрепленные к ним осмотрщики и вагонники, оснащенные носимыми терминалами.
Экстренная остановка ТПЕ по команде от прикрепленного терминала, находящегося в режиме управления, о падении или критическом ухудшении здоровья исполнителя регистрируется СУ СУДТПС и доводится до станционного диспетчера. Возможность движения восстанавливается, если в течение контрольного периода поступает запрос от исполнителя на продолжение операции, а показания навигационных датчиков и датчиков состояния здоровья с носимого им терминала подтверждают способность исполнителя к продолжению работы. При отсутствии - СУ СУДТПС формирует сообщение в ЦУ о замене исполнителя. Прерванное наряд-задание аннулируется, а место происшествия ограждается. Оперативный план работы станции и соответствующая ему последовательность наряд-заданий корректируется.
Контроль технологического процесса на станции осуществляет станционный диспетчер, на экранах АРМ которого отображается динамическая модель технологического процесса, оперативный и суточный план-графики работы станции, ожидаемый подход поездов.
При возникновении на станции нештатных ситуаций или отказов технических средств централизации диспетчер имеет возможность остановить роспуск с помощью команды СЦ перекрытия горочного светофора или отменить запрет на продолжение роспуска, принять поезд по пригласительному сигналу входного светофора после докладов работников причастных линейных предприятий об установке стрелок по маршруту. Координацию действий исполнителей станционный диспетчер осуществляет по каналам цифровой радиосвязи через носимые терминалы.
Предлагаемый способ реализует комплексная система управления технологическим процессом железнодорожной станции.
На фиг. 1 представлена структурная схема комплексной системы управления технологическим процессом железнодорожной станции, на фиг. 2 – структурная схема центра управления и контроля технологического процесса станции, на фиг. 3 – структурная схема исполнительного уровня комплексной системы управления технологическим процессом железнодорожной станции.
Комплексная система управления технологическим процессом железнодорожной станции включает центр 1 управления и контроля технологического процесса станции (ЦУ 1).
Входы/выходы ЦУ 1 подключены соответственно к выходам/входам аппаратно-программных комплексов внешних сетевых систем АСОУП 2 и ГИД-Урал 3, а также - к серверу 4.
При этом сервер 4 связан сетью 5 передачи данных с аппаратно-программными устройствами автоматизированных рабочих мест 6-25 диспетчеров дистанции электроснабжения (АРМ 6 ЭЧ), станционного технологического центра (АРМ 7 СТЦ), руководства станции (АРМ 8 ДС, ДСЗ), товарного кассира (АРМ 9 ТВК), приемосдатчика (АРМ 10 ПРС), контейнерной площадки (АСУ 11 КП), нарядчика локомотивных бригад (АРМ 12 ТЧБ), дежурного эксплуатационного локомотивного депо (АРМ 13 ТЧД), машиниста-инструктора (АРМ 14 ТЧМИ), расшифровщика (АРМ 15 Р), диспетчера участка по ремонту приборов безопасности (АРМ 16 ТРПУ), диспетчера сервисного локомотивного депо (АРМ 17 СЛД), мастера по ремонту вагонного эксплуатационного депо (АРМ 18 МПРВ), диспетчера промывочно-пропарочной станции вагонов (АРМ 19 ППВ), диспетчера дистанции сигнализации, централизации и блокировки (АРМ 20 ШЧД), диспетчера группы надежности (АРМ 21 АСУ Ш), диспетчера дистанции пути (АРМ 22 ПЧД), диспетчера регионального центра связи (АРМ 23 РЦС), электромеханика связи (АРМ 24 ЕСМА), диспетчера отряда ФГП ВОЖДТ (АРМ 25 ФГП ВОЖДТ) охраны, а также системы 26 видеонаблюдения, пункта 27 коммерческого осмотра (ПКО 27), пункта 28 технического осмотра вагонов (ПТО 28), системы 29 оповещения, системы 30 выдачи предупреждений (АСУВОП 30), основной или резервной систем 31 цифровой радиосвязи (СЦР 31), системы 32 опробования тормозов (АС 32 ОПТ), пунктов 33 (ППСС 33), размещенных на подходах к станции, и устройством 34 межсетевого взаимодействия (УМВ 34).
УМВ 34 осуществляет разделение информационных ресурсов управляющего и исполнительного уровней комплексной системы управления технологическим процессом железнодорожной станции.
Функции исполнительного уровня выполняют системы 35 централизации, включающие систему 36 микропроцессорной централизации (МПЦ 36) и комплексную систему 37 автоматизации управления сортировочным процессом (КСАУ СП 37), а также система 38 управления движением тягового подвижного состава (СУД ТПС 38).
УМВ 34 соединен входами/выходами с соответствующими входами/выходами ЦУ1, аппаратно-программного комплекса КСАУ СП 37 и станционного устройства 39(СУ 39) СУД 38 ТПС.
Другие соответствующие входы/выходы СУ 39 подключены к входам/выходам СЦР 31 и СЦ35, вход – к выходу аппаратно-программного устройства АСУВОП 30, а выход подключен к входу аппаратно-программного устройства системы 29 оповещения
Вход аппаратно-программного устройства СТДМ 40 подключен к выходу СЦ35, а выход - к входу аппаратно-программного устройства сетевой диагностической системы АСУ Ш 41.
СЦР 31 обеспечивает взаимодействие по радиоканалу СУ 39 СУД 38 ТПС с бортовой аппаратурой 42 (БА 42) ТПЕ, а также - с носимыми терминалами 43 соответственно станционного диспетчера, исполнителей линейных предприятий, работающих на путях, и работников охраны.
При этом выходы ЦУ 1 подключены к соответствующим входам КСАУ СП 37 и МПЦ 36. Соответствующие входы/выходы МПЦ 36 подключены к аппаратно-программному комплексу системы 44 диспетчерской централизации (ДЦ 44), выход которого через узел 45 межсетевого взаимодействия соединен с соответствующим входом аппаратно-программного комплекса ГИД-УРАЛ 3, другой вход/выход которого подключен к другому выходу/входу аппаратно-программного комплекса АСО УП 2.
Устройства 46 контроля схода и волочения деталей подвижного состава (УКСПС 46) выходами подключены к соответствующим входам СЦ35.
ЦУ1 содержит блок 47 формирования и контроля выполнения маневровых операций, соединенный первым входом/выходом с первым входом/выходом блока 48 формирования и контроля выполнения поездных операций, вторым входом/выходом – с первым входом/выходом блока 49 формирования и контроля выполнения грузовой и коммерческой работы, соединенного вторым входом/выходом с первым входом/выходом блока 50 формирования и контроля выполнения операций по подготовке вагонов, третьим входом/выходом – со вторым входом/выходом блока 48 и первым входом/выходом блока 51 формирования суточного и оперативного план-графика работы станции, другие входы/выходы которого подключены к первым входам/выходам соответственно терминала 52 диспетчера станции и блока 53 моделирования и формирования наряд-заданий для выполнения оперативного план-графика работы станции.
Четвертым входом/выходом блок 47 соединен с первым входом/выходом блока 54 формирования модели исполнения графика работы станции, пятым входом/выходом – с первым входом/выходом блока 55 организации работы локомотивов и локомотивных бригад, шестым входом/выходом – с третьим входом/выходом блока 48 и первым входом/выходом накопителя 56 наряд-заданий оперативного план-графика работы станции, соединенного вторым входом/выходом с первым входом/выходом шлюза 57, второй вход/выход которого подключен к второму выходу/входу блока 54.
Седьмой вход/выход блока 47 соединен с третьим входом/выходом шлюза 57 и четвертым входом/выходом блока 48, другие входы/выходы которого подключены соответственно к третьему входу/выходу блока 54, второму входу/выходу блока 55, к соответствующим входам/выходам аппаратно-программных комплексов АСОУП 2, ГИД-Урал 3 и сервера 4, а вход - соединен с выходом блока 58 расчета показателей работы станции и технического нормирования, вход которого соединен с выходом блока 54.
Восьмой вход/выход блока 47 подключен к серверу 4, к которому подключены также третьи входы/выходы блоков 49 и 55, второй вход/выход блока 50 и первый вход/выход блока 58.
Другой выход блока 54 подключен к входам терминала 52 и блока 53, второй вход/выход которого соединен с третьим входом/выходом блока 56, а третий вход/выход - со вторым входом/выходом терминала 52, выходами соединенного с соответствующими входами СЦ 35. Вход/выход шлюза 57 подключен к УМВ 34.
Система централизации СЦ 35 включает центральный процессор 59 МПЦ36 с виртуальными светофорами, входы которого подключены соответственно к выходам УКСПС 46, приемников 60 рельсовых цепей электрической централизации и первому выходу накопителя 61 маршрутных заданий, а входы/выходы - соединены с входами/выходами блоков 62 управления пригласительными и входными светофорами, блоков 63 контроля и управления стрелочными приводами, устройствами 64 тормозными стационарными для закрепления составов, системами 65 автоматической переездной сигнализации АПС и блока 66 сопряжения.
Выход блока 66 подключен к соответствующему входу аппаратно-программного устройства СТДМ 40, а второй, третий, четвертый и пятый входы/выходы – соответственно к входам/выходам аппаратно-программного устройства ДЦ 44, накопителя 61 маршрутных заданий, аппаратно-программного устройства автоматизированного рабочего места 67 электромеханика дистанции сигнализации, централизации и блокировки (АРМ 67 ШНС) и первым входом/выходом центрального процессора 68 КСАУ СП37.
Входы/выходы процессора 68 подключены соответственно к выходам/входам блока 69 контроля заполнения путей сортировочного парка, блоков 70 контроля и управления горочными стрелочными приводами, блока 71 контроля и управления вагонными замедлителями, аппаратно-программного устройства системы 72 управления компрессорной станцией, блока 73 контроля и замыкания маневровых маршрутов, блока 74 управления горочными светофорами и указателями количества вагонов, блоков 75 управления балочными заграждающими устройствами с дистанционным управлением и соответствующему входу/выходу УМВ 34.
Входы процессора 68 подключены соответственно к выходам приемников 76 счетчиков осей, приемников 77 рельсовых цепей и ко второму выходу накопителя 61 маршрутных заданий.
Вторые входы блоков 62 и 74 соединены с соответствующими выходами терминала 52 диспетчера станции.
Станционное устройство 39 СУД 38 ТПС содержат процессор 78, входы/выходы которого подключены соответственно к шестому входу/выходу блока 66 сопряжения СЦ 35 и первым входам/выходам накопителя 79 наряд-заданий тяговых подвижных единиц, блока 80 формирования модели дислокации ПЕ и блока 81 идентификации тяговых подвижных единиц.
Выходы процессора 78 соединены с входами блока 82 задания маршрутов и скоростей и блока 83 контроля за перемещением ТПЕ. Другие входы блока 83 соединены с первым выходом блока 84 нормативно-справочной информации, с основным и резервным комплектами СЦР 31, а выходы - подключены к первым входам блока 81, блока 85 восприятия и формирования речевой команды управления и блока 80, вход которого соединен со вторым выходом блока 84, а выходы - к УМВ 34 и аппаратно программному устройству системы 29 оповещения.
Первый выход блока 81 через блок 82 подключен к СЦР 31, а второй – ко второму входу блока 85, выход которого соединен со вторым входом блока 82, подключенного к выходу дифференциальной станции 86 спутниковой навигации, установленной на станции.
При этом накопитель 79 входом/выходом подключен к соответствующему выходу/входу УМВ 34.
Бортовая аппаратура БА 42 каждой ТПЕ содержит бортовой контроллер 87 соответственно для поездного, маневрового локомотива или другой тяговой подвижной единицы, приемник 88 кодов автоматической локомотивной сигнализации и сигнальных шлейфов САУТ, приемник 89 навигационных сигналов, приемопередатчик 90, блок 91 индикации и управления, блок 92 регистрации и аутентификации, систему 93 автоматического регулирования тяги и тормозных устройств локомотива САР, каждый из которых подключен к локальной сети передачи данных ТПЕ.
Другие входы/выходы контроллера 87 соединены со вторым входом/выходом блока 93, с первым входом/выходом блока 94 управления, с входом/выходом коммутатора 95 режимов управления локомотивом с машинистом/без машиниста, а выход – с входом блока 96 речевого информатора машиниста, выход которого подключен к входу блока 92.
Выход блока 93 подключен к аппаратам управления локомотивом, а вход –к выходам датчиков 97 тока в силовой установке локомотива, датчиков 98 скорости и направления движения, датчиков 99 давления в тормозных устройствах, датчиков 100 приближения локомотива.
Выходы датчиков 97-100 соединены также с первым входом блока 94, второй вход/выход которого подключен к входу/выходу блока 101 экстренного торможения ЭПК, а вход - к выходу коммутатора 95, соединенного входами с выходами телемеханической системы 102 контроля бодрствования машиниста и устройства 103 бдительности машиниста.
Третий вход/выход блока 93 подключен к входам/выходам блоков 104-106 управления соответственно звуковыми сигналами и прожекторами, передней и задней автосцепками.
Комплексная система управления технологическим процессом железнодорожной станции, реализующая предлагаемый способ, функционирует следующим образом.
Информационная платформа комплексной системы и синхронизация работы его локальных систем управления основана на трех динамических моделях последовательно дополняющих друг друга.
Модель поля формируют автоматически в памяти процессора 59 МПЦ 36 и процессора 68 КСАУ СП 37 путем опроса входящих в эти системы напольных устройств, контролируемых блоками соответственно60, 62, 63, 64, 65, 69, 70, 71,74, 75, 76, 77, состояний виртуальных светофоров и блоком 73 контроля и замыкания в маршруте изолированных участков, а затем объединяют в единую модель поля блоком 78 путем актуализации элементов цифровой модели технологического процесса (ЦМПР).
Модель дислокации и параметров движения подвижных единиц (ПЕ), формирует автоматически блок 80 СУ 39 СУД38ТПС путем дополнения модели поля параметрами движения, управления и функционирования БА 42, зарегистрированных на путях станции ТПЕ, и носимых терминалов 43, поступающими по каналам СЦР 31 через блок 83.
Динамическая модель технологического процесса формируется автоматически в блоке 54 ЦУ1 путем дополнения модели дислокации, формируемой блоком 80, результатами технического и коммерческого осмотров вагонов ППСС 33 и ПКО 27 и ПТО 28, опробования тормозов АС ОПТ32, данными о грузовых операциях, работах по подготовке вагонов, локомотивов и локомотивных бригад, а также результатами функционирования и обслуживания устройств инфраструктуры от линейных предприятий по кругу ведения.
Таким образом, функции планирования, управления и исполнения выполняются на основе единой динамической модели технологического процесса, формируемой автоматически. Данные модели блока 54 используют для формирования план-графиков работы станции и контроля их выполнения, а также для расчета показателей работы станции, которые передают в терминал 52 для информирования станционного диспетчера и в сервер 4 для передачи причастным линейным предприятиям.
Блок 58 по данным блока 54 на основе репрезентативных выборок автоматически рассчитывает технические нормы выполнения технологических операций на станции и передает результаты серверу 4 для использования при подготовке суточного и оперативного план-графиков работы станции. Выборки группируются по ряду согласованных признаков, включая климатические, сезонные, временные (день/ночь) условия, объем и характер предъявляемого вагонопотока и др. существенные квалификационные признаки, определяемые индивидуально для каждого объекта управления. Кроме того, блок 58 формирует протоколы работы технических средств и исполнителей по кругу ведения линейных предприятий и аналитические справки по работе станции для систем сетевого уровня. Протоколы передаются в сервер 4, а аналитические справки дополнительно в блок 48 для трансляции в системы внешнего сетевого уровня.
Подготовка суточного план-графика работы станции осуществляется следующим образом.
Первоначальными источниками информации для составления суточного план-графика являются план формирования грузовых поездов и расписание движения пассажирских и пригородных поездов запрашиваемые на следующие сутки блоком 48 ЦУ1 из системы сетевого уровня АСОУП 2. Блок 48 формирует последовательность операций с поездами, а также другими ТПЕ, в части их приема, осмотров, готовности и отправления, а также осуществляет их хранение и документальное оформление этих операций в электронном виде.
Блок 48 формирует для блока 55 заявки на обслуживание поездных локомотивов и осуществляет подвязку локомотивов и локомотивных бригад к отправлению поездов в расчете на предъявляемый на станцию поездопоток.
Информацию о вагонопотоке с переработкой на станции, об ожидаемом прибытии вагонов под погрузку и разгрузку блок 48 передает в блок 47, который формирует последовательность операций по расформированию/формированию составов, погрузке/разгрузке вагонов совместно с блоком 49 и маневровым перемещениям групп вагонов в пределах станции и на примыкающих путях, а также осуществляет документальное оформление этих операций в электронном виде, формирует для блока 55 заявки на обслуживание маневровых локомотивов. В свою очередь блок 47 передает в блок 48 информацию о сформированных и подготовленных к отправке составах и определяет по результатам обмена информацией с блоками 49 и 50 ожидаемый объем выполнения грузовых операций, предъявляемых к отправке груженых и порожних вагонах, а также направленных в ремонт, отремонтированных и подготовленных к погрузке вагонах. Блок 49 уведомляет клиентов об ожидаемом поступлении вагонов и грузов через сервер 4.
Последовательность технологических операций на станции рассчитываются на основе индивидуальных для данной станции показателей технического нормирования. Результаты нормирования регулярно обновляются блоком 58, передаются серверу 4 и запрашиваются блоками 47-50 по сочетанию квалификационных признаков при необходимости.
Элементы суточного план- графика работы, сформированные блоками 47 и 48, выкладываются на сервер 4 и по сети 5 передачи данных запрашиваются с аппаратно-программных устройств АРМ 6-23 линейных предприятий, которые дополняют его индивидуальными номерами исполнителей, ТПЕ и локомотивных бригад при необходимости и согласовывают его в целом или с изменениями.
Согласованные элементы суточного план-графика уточняют возможности причастных предприятий в плане обеспечения технологического процесса вагонами, локомотивами, локомотивными бригадами, объемами погрузки и выгрузки вагонов и другой продукцией. Инфраструктурные линейные предприятия ЭЧ, ШЧ, ПЧ и РЦС дополняют суточный график работой по обслуживанию напольных устройств с ранее согласованным предоставлением окон, вводом ограничений по скорости или предупредительных сигналов и указанием номеров терминалов 43 работников, а также маршрутами движения и номерами ССПС и другой специализированной техники.
Согласованные линейными предприятиями элементы суточного план-графика выкладываются на сервер 4 и запрашиваются блоками 47 и 48, которые увязывают их в технологические последовательности операций и передают в блок 51, формирующий сводный план-график суточной работы станции. Суточный план-график блок 51 передает на терминал 52 АРМ станционного диспетчера и воспроизводится на его мониторах. На других мониторах терминала 52 в графическом виде воспроизводятся данные ожидаемого входного потока поездов, поступающие от сетевых систем АСОУП 2 и ГИД-Урал 3 через блоки 48 и 51, а также текущее состояние динамической модели технологического процесса, передаваемое блоком 54.
Станционный диспетчер в соответствии с указаниями поездного или узлового диспетчеров, которые передаются по телефонной связи, согласовывает суточный план-график и при необходимости корректирует условия планирования, которые служат основанием для переформирования отдельных последовательностей операций блоками 47, 48 и 51. Согласованный станционным диспетчером суточный план-график передается через блок 56 блокам 47 и 48 и далее в сервер 4, а от него по сети 5 передачи данных линейным предприятиям по принадлежности для руководства и контроля исполнения.
Линейные предприятия поддерживают актуальность суточного план-графика, информируя блоки 47 и 48 ЦУ1 об изменениях индивидуальных номеров исполнителей, ТПЕ, локомотивных бригад, привязанных к план-графику, готовности вагонов, ТПЕ и локомотивных бригад.
Оперативный план-график формируют на основании суточного план-графика с учетом реального подхода поездов по данным АСОУП 2 и ГИД-Урал 3, последних корректировок линейных предприятий, исполненного техпроцесса на момент формирования за выбранный период, например, 1час. В общем случае период формирования оперативного план-графика устанавливается индивидуально для объекта, его значение обратно пропорционально интенсивности работы объекта управления. Последовательности технологических операций оперативного план-графика формируются блоками 47 и 48 с учетом накопленных изменений исполненного техпроцесса относительно суточного план-графика, объединяются блоком 51 и передаются в блок 53.
Блок 53 построен на основе известной технологии АС ТРА, с учетом специфических особенностей объекта управления и использованием индивидуальных показателей технического нормирования, поступающих из блоков 47 и 48 через блок 51. Блок 53 реализует имитационную модель технологического процесса на базе реальной динамической модели технологического процесса, передаваемой из блока 54, прогнозируемой блоком 53 на момент начала формирования. При необходимости станционный диспетчер с терминала 52 вводит в блок 53 дополнительный критерий для моделирования, например первоочередная переработка полувагонов. По результатам имитационного моделирования блок 53 оперативный план-график преобразует в вариантную последовательность наряд-заданий. Для каждой ПЕ от начала ее зарождения на станции до ухода или объединения с другими ПЕ блок 53 формирует в пределах периода планирования сквозные последовательности выполняемых наряд-заданий, которые соответствуют ниткам оперативного план-графика. Последовательности независимых ПЕ могут выполняться параллельно, если маршруты их движения не враждебны друг другу или согласованы технологическим процессом.
Наряд-задания, предусматривающие участие исполнителей с носимыми терминалами 43, прикрепляются к наряд-заданиям ПЕ с опережением во времени необходимом для прибытия на место выполнения операции.
Нитки графика, соответствующие поездным локомотивам зарождаются на участках приближения к станции, а заканчиваются на участках удаления. Для маневровых локомотивов формируют непрерывные нитки план-графика из рабочих и порожних полурейсов или простоев, например, под составом в ожидании надвига. Нитка план-графика ПЕ, представляющей объединение локомотива с вагонами, может на определенном этапе раздваиваться на локомотив или локомотив с частью вагонов и оставшиеся вагоны, например, для технического и коммерческого осмотра, или сливаться с ниткой графика уже стоящих на пути вагонов. Наряд-задания, выполняемые с участием исполнителей, включают команды, синхронизированные с ходом технологического процесса, передаваемые на их на носимые терминалы 43 по каналам СЦР31.
Не менее трех вариантов последовательностей наряд-заданий блок 53 передает в терминал 52 для согласования станционным диспетчером.
Выбранный вариант оперативного план-графика по команде диспетчера блок 53 передает в накопитель 56. Накопитель 56 осуществляет синхронный вывод наряд-заданий, относящихся к ТПЕ и прикрепленным к ним носимым терминалам 43 исполнителей через шлюз 57 и УМВ 34 в накопитель 79 СУ39 СУД38 ТПС, а в процессор 68 КСАУ СП 37 наряд –задания с программами роспуска составов, откорректированные по результатов коммерческого и технического осмотров блоками 27 и 28. В блоки 47 и 48 по назначению для контроля и исполнения оперативного план-графика накопитель 56 передает все наряд-задания.
Параллельная последовательность ниток оперативного план-графика обеспечивает одновременное выполнение перемещений ТПЕ на станции по невраждебным маршрутам с обеспечением требований безопасности и повышение эффективности технологического процесса, исключая влияние «человеческого фактора».
При этом наряд-задания из накопителя 56 вводятся в накопитель 79 с некоторым опережением для создания временного запаса по принятию решения об их реализуемости и возможности изменения при возникновении нештатных ситуаций. Решение о реализуемости наряд-заданий принимает процессор 78 на основании анализа состояния модели 80 дислокации ПЕ на станции. Из согласованных наряд-заданий процессор 78 выделяет начальные и конечные пункты маршрутов полурейсов и через блок 66 сопряжения передает их в накопитель 61 СЦ35 с признаком зоны управления процессора 59 или процессора 68.
Накопитель 61 СЦ35 и накопитель 79 создают при участии процессора 78 стековые последовательности маршрутов движения по количеству одновременно работающих на станции ТПЕ с признаками приоритета при пересечениях маршрутов движения различных ТПЕ. Такой подход позволяет сократить межоперационные интервалы между наряд-заданиями, относящимися к одной нитке графика за счет своевременного или предварительного задания маршрутов, в том числе путем их продления без остановки движения после освобождения предшествующей ПЕ. Другое преимущество заключается в локализации последствий сбоев и упрощении коррекции оперативного план-графика.
Ввод последующего маршрутного задания осуществляется индивидуально для каждой нитки план-графика движения ПЕ после завершения или во время выполнения очередного маршрутного задания в зависимости от поездной ситуации по команде процессора 78. Центральные процессоры 59 и 68 через блок 66 циклически передает процессору 78 информацию о состоянии устройств системы централизации в объеме модели поля. Диагностическая информация о функционировании аппаратно-программных комплексов обеих систем вводится через узел 66 в СТДМ 40 и аппаратно-программное устройства АРМ 67 ШНС.
При переводе станции на диспетчерское управление маршрутные задания поступают в накопитель 61 и процессор 59 от ДЦ44 через узел 66, а в обратном направлении - состояние устройств микропроцессорной централизации МПЦ 36.
После передачи маршрутного задания в процессор 59 или 68 в накопителе 61маршрутных заданий оно стирается, а очередь маршрутных заданий данной нитки план-графика продвигается.
Процессор 59 для задания каждого маршрута последовательно выполняет следующие операции:
- формирует логическую последовательность из изолированных участков, соответствующую путевому развитию станции, между элементами начала и окончания маршрута, причем началом маршрута может быть физический или виртуальный светофор, а окончанием светофор, занятый участок или маршрут за пределы станции;
- проверяет свободность участков маршрута по данным поступающим от приемников 60 рельсовых цепей, их не замкнутость в других маршрутах и не враждебность другим маршрутам по данным поступающим от блока 62 и самого процессора 59;
- устанавливает стрелочные переводы по маршруту движения, подачей команд на блоки 63 и замыкает стрелки и участки в маршруте, исключая их перевод до выполнения маршрута и освобождения стрелочного участка или отмены маршрута;
- переключает входной светофор поездного маршрута путем воздействия на соответствующий приемник 62 при необходимости и другие попутные поездные светофоры на разрешающее показание;
- переключает попутные светофоры маневрового маршрута на разрешающие показания;
- управляет системой 65 переездной сигнализацией с учетом команд от СУ 39 СУД38ТПС через блок 66 сопряжения и процессор 59;
- передает сообщение в очередном цикле обмена информацией с СУ 39 СУД38ТПС процессору 78 через узел 66 о состоянии элементов модели поля;
- анализирует состояние участков на маршруте и переходит к реализации следующего маршрута данной нитки план-графика при его наличии в накопителе 61.
В процессе реализации маршрута процессор 59 последовательно выполняет следующие операции:
- контролирует освобождение участков маршрута по данным приемников 60;
- переключает поездные светофоры на запрещающее показание, после занятия следующего за ним участка, маневровые – после освобождения участка перед светофором или участка за светофором, если участок перед светофором занят;
- снимает замыкание участков маршрута после их освобождения.
Изменение состояния участков, светофоров и стрелочных переводов регистрируется и отображается в аппаратно-программным устройством АРМ 67 ШНС, как и диагностическая информация о функционировании аппаратно-программных средств СЦ 35. Кроме того, в диагностическом режиме в зоне согласованного «окна» предусмотрен диалоговый режим поиска и устранения неисправностей с использованием АРМ 67 ШНС.
Для зоны КСАУ СП 37 различают два режима функционирования системы централизации: роспуск состава и маневры. Допускается совмещение обеих режимов при отсутствии враждебности маршрутов. Программа роспуска с указанием номера состава и пути прибытия поступает в центральный процессор 68 КСАУ СП 37 от блока 56 ЦУ1 через шлюз 57 и УМВ34.
Маршрут надвига и роспуска состава поступает в блок 66 в виде маршрутного задания от блока 78 СУ 39. В памяти процессора 68 хранятся программы роспуска на составы, подготовленные к роспуску. Выбор искомой программы осуществляется по маршруту основного надвига, который указывает на литеры пути парка приема и горочного светофора.
В ходе роспуска процессор 68 выполняет следующие операции:
- рассчитывает скоростной режим движения горочного локомотива на определенную глубину и дополняет расчет по ходу роспуска;
- передает скоростной режим в процессор 78 через блок 66 синхронно с ходом роспуска;
- управляет огнями горочного светофора в соответствии с рассчитанным скоростным режимом;
- управляет указателями количества вагонов в трех очередных отцепах через блок 74 в соответствии с программой роспуска и результатами расцепки вагонов;
- контролирует правильность расцепки вагонов на горке через приемники 76;
- обеспечивает маршрутизацию и вытормаживание отцепов на спускной части сортировочной горки, управляя горочными стрелками через блок 70, вагонными замедлителями и компрессорными установками через блоки 71 и аппаратно- программные устройства 71;
- контролирует маршруты и скоростные режимы скатывания отцепов через показания блока 69, приемников 76 и 77, регистрируя запуски, превышение допустимой скорости соударения и интервалы между отцепами в сортировочном парке;
- передает информацию о результатах исполненного роспуска через УМВ34, шлюз 57 в блок 47 для контроля и в блок 54 для актуализации динамической модели ЦУ1,
- управляет и контролирует заграждение и снятие заграждения составов на путях сортировочного парка через блок 75;
- переключает горочный светофор на запрещающее показание через блок 74.
Организация маневрового движения по спускной части сортировочной горки в целом не отличается от маневров в зоне МПЦ 35. Маршрутные задания из накопителя 61 поступают в процессор 68 КСАУ СП 37. Процессор 68 для задания каждого маршрута последовательно выполняет следующие операции:
- формирует логическую последовательность из изолированных участков или участков ограниченных счетчиками осей между элементами начала и окончания маршрута, причем началом маршрута может быть физический или виртуальный светофор, а окончанием светофор, занятый участок или путь сортировочного парка;
- проверяет свободность участков маршрута по данным приемников 76 и 77, их свободность от других маршрутов по данным блока 73;
- устанавливает стрелочные переводы по маршруту движения, подачей команд на блоки 70 и замыкает стрелки и участки в маршруте, исключая их перевод до выполнения маршрута и освобождения стрелочного участка или отмены маршрута, подачей команды на блок 73;
- растормаживает вагонные замедлители и устройства заграждения на участках, входящих в маневровый маршрут подачей команд на блоки 71 и 75; открывает попутные виртуальные светофоры для маневрового маршрута;
- передает сообщение в очередном цикле обмена информацией с СУ 39 СУД38ТПС через блок 66 о состоянии элементов маршрута; анализирует состояние участков на маршруте и переходит к реализации следующего маршрута последовательности, при его наличии в накопителе 61.
В процессе реализации маршрутов процессор 68 последовательно выполняет следующие операции:
- контролирует освобождение участков маршрута по данным приемников 76 и 77;
- переключает маневровые светофоры на запрещающее показание после освобождения участка перед светофором или участка за светофором, если участок перед светофором занят;
- отменяет замыкание участков маршрута после их освобождения, командой блоку 73.
ЦМПР путевого развития станции записана в памяти блока 84 СУ 39 и и в режиме реального времени пополняется информацией о местах и времени проведения работ с признаками прекращения движения, ограничения по скорости движения или звукового оповещения работающих на пути.
Работа системы СУ 39 СУД38ТПС регламентируется потоком наряд-заданий, которые поступают в блок 79 из блока 56 ЦУ1 через шлюз 57 и УМВ34. Одновременно с наряд-заданиями блок 79 получает от системы 26 видеонаблюдения через сеть 5 передачи и УМВ34 видеоряд объектов наблюдения, к которым относятся управляемые ТПЕ с вагонами и люди, находящиеся на маршруте их движения.
Процессор 78 для каждой управляемой ТПЕ запрашивает наряд-задание и проверяет возможность реализации наряд-заданий, используя данные модели дислокации ПЕ и видеонаблюдения, поступающие от блока 80 и накопителя 79, а также текущие изменения модели поля.
В случае невозможности реализации наряд-задания, например, из-за отказа технических средств или аварии на предыдущем маршруте враждебном данному процессор 78 через блок 79, УМВ34 и шлюз 57 ЦУ1 информирует блок 56 о необходимости коррекции наряд-заданий проверяемой последовательности. Коррекцию наряд-заданий осуществляет ЦУ 1. При необходимости, до получения откорректированных наряд-заданий, формирование маршрутов движения соответствующей ТПЕ и ее движение останавливается.
Наряд-задания, прошедшие проверку, классифицируются процессором 78 по зонам управления МПЦ 36/КСАУ СП37 и маршрутам. другой ПЕ. Процессор 78 выделяет из наряд-задания начальную и конечную точки маршрута и вводит их в накопитель 61 через блок 66 сопряжения предназначенный для ТПЕ ХХХХ с признаком МПЦ 36 или КСАУ СП 37.
Накопитель 61, получив маршрутное задание с таким признаком, вводит его в зависимости от зоны движения, указанной в маршруте, соответственно в процессор 68 или в процессор 59 по команде процессора 78. Маршрутам, не предусматривающим операции с вагонами или остановку для пропуска другой ПЕ, присваивается статус следующий. Маршруты с таким признаком вводятся в соответствующий ТПЕ канал накопителя 61 без команды процессора 78 и передаются поцессорам 59 или 68 сразу после задания предыдущего маршрута для данной ТПЕ.
Для маршрутов за стрелку процессор 78 определяет по модели блока 80 первый светофор по ходу движения, расстояние от которого до освобождения стрелочного участка превышает длину ПЕ, и его номер передает через блок 66 сопряжения и накопитель 61 соответственно процессору 59 или 68 как конец маршрута.
Для наряд-заданий, которые предусматривают операции с вагонами или остановку для пропуска другой ТПЕ, очередной маршрут последовательности вводится через блок 66 в накопитель 61 только по команде процессора 78.
Для каждой ТПЕ процессор 78 формирует маршрутное задание, включающее следующие параметры:
- номер ТПЕ;
- режим управления – с машинистом/без машиниста, автономный/с исполнителем, тормозная магистраль замкнута/разомкнута, локомотивом/вагонами вперед;
- параметры маршрута движения, в том числе: маршрут поездной или маневровый, конечный элемент маршрута (до сигнала ХХХХ, на занятый путь/участок ХХХХ, за стрелку ХХХХ), длина маршрута (в м.), длина ПЕ (в м.), профиль на маршруте, предупреждения на маршруте, через ХХХ м. действие (остановка/ снижение скорости до ХХ км/ч и звуковой сигнал/ звуковой сигнал), значение допустимой скорости движения ХХ км/ч и следующее меньшее ХХ км/ч, через ХХХ м.
Маршрутное задание процессор 78 предает в блок 82, который дополняет его значением дифференциальной поправки, поступающей из блока 86, шифрует и в виде кодограммы передает БА 42 ТПЕ по каналам СЦР31, и в блок 81 для идентификации и сопровождения в процессе реализации маршрутного задания.
Предупреждения поступают из АСУ ВОП 30, аккумулирующей согласованные заявки линейных предприятий, передаваемые по сети 5 передачи данных. Параметры ЦМПР и предупреждения передаются из блока 84 в блоки 80, 81 и 83, где актуализируются потоками данных о текущем состоянии устройств СЦ35, поступающими от процессоров 59 и 68 через блок 66 сопряжения и процессор 78. Информация о параметрах движения, местоположения и функционировании управляемых ТПЕ, которая передается по каналам СЦР31от БА42 ТПЕ, а также информация о передвижениях, о результатах выполнения операций исполнителей участвующих в управлении ТПЕ и состоянии работников инфраструктурных предприятий во время выполнения профилактических и ремонтных работ в зоне движения ТПЕ, передаваемая по радиоканалу посредством носимых терминалов 43 поступает в блок 83.
В блоке 83 кодограммы передаваемые по радиоканалу расшифровываются, перемещения ТПЕ и действия исполнителей преобразовываются в формат ЦМПР и передаются в блок 80 для ведения динамической модели дислокации ПЕ и исполнителей на станции и в блок 81 для анализа правильности реализации и актуализации текущих параметров выполняемых наряд-заданий, функционирования элементов системы управления и исполнителей.
БА 42 ТПЕ фиксирует вступление на железнодорожную станцию по данным навигационного приемника 89, привязанным в БА 42 к электронной карте маршрута у поездных локомотивов, а у маневровых – к ЦМПР станции и зоне действия СЦР31, инсталлированным в блоке 92. Бортовой контроллер 87 ТПЕ фиксирует вступление ТПЕ на станцию и через приемопередатчик 90 посылает кодограмму по каналам СЦР31 с указанием своего номера, типа локомотива, координаты местоположения и расстояние от переднего буферного бруса до навигационной антенны приемника 89.
Блок 83 расшифровывает кодограмму – запрос и передает его в блок 81. Блок 81 формирует ответный запрос и передает его через блок 82 вместе с дифференциальной поправкой, определяемой блоком 86 по каналам СЦР31 в БА 42.
Бортовой контроллер 87 БА 42 ТПЕ формирует запрос на ввод ТПЕ в контур управления СУ 39, включающий данные навигационных координат, скорректированные с учетом дифференциальной поправки, данные о параметрах движения и управления ТПЕ, и передает через приемопередатчик 90 по радиоканалу-СЦР31 в блок 83.
Блок 81 по данным блока 83 определяет ориентацию (локомотив развернут в четном/нечетном направлении по соотношению положения реверсора локомотива: вперед/назад и направления движения, фиксируемого датчиками 98), позиционирует новую ТПЕ на ЦМПР, параметры которой получает из блока 84. Затем запрашивает у процессора 78 подтверждение появления новой ТПЕ по данным приемников 76 и 77 СЦ35, включая участки приближения к станции, либо уведомляет, что ТПЕ расположена в нецентрализованной зоне.
Процессор 78 по данным соответствующего наряд-задания из накопителя 79 формирует маршрутное задание для новой ТПЕ, которое передается через блок 82 по каналам СЦР31 в БА42. Блок 81 номера и маршруты идентифицированных ТПЕ передает через процессор 78, накопитель 79, УМВ34 и сеть 5 в систему 26 как зарегистрированные объекты видеонаблюдения. Данные о перемещениях и свободности маршрута движения идентифицированной ТПЕ поступают от системы 26 видеонаблюдения по каналам СЦР31 в блок 83.
Блок 83 расшифровывает поступившие кодограммы от БА 42, контролирует перемещение вагонов и ТПЕ, рассчитывает заполнение путей и накопление вагонов на путях в централизованной зоне станции. Результаты контроля блок 83 передает блок 80 для внесения изменений в модель дислокации ПЕ и формирования при необходимости команды в систему 30 для оповещения по громкой связи работников железной дороги и пассажиров о приближении поезда или другой ТПЕ.
Блок 80 передает данные об изменениях модели дислокации ПЕ через УМВ34 и узел 57 в блок 54 ЦУ 1 для актуализации динамической модели станции.
Диагностическую информацию о функционировании технических средств блок 54 направляет в блок 58, который формирует протоколы работы технических средств и выкладывает их на сервер 4.
Кроме того, результаты контроля блок 83 передает в блок 81 для проверки правильности выполнения маршрутного задания и функционирования аппаратно-программных средств систем управления ТПЕ.
Блок 81 контролирует исполнение каждой ТПЕ своего маршрутного задания и допустимого скоростного режима по данным пройденного пути, передаваемым БА 42 ТПЕ по каналам СЦР31, и показаниям приемников 60, 76 и 77 СЦ35. Блок 81 формирует каждые 1-2с. подтверждение на выполнение ТПЕ маршрутного задания с откорректированными значениями текущей длины маршрута и допустимых скоростей движения текущей и следующей меньшей через ХХХ м, определение скоростного режима выполняет с учетом предупреждений, действующих на маршруте, передаваемых из блока 84. Подтверждение маршрутного задания блок 81 передает БА 42 ТПЕ через блок 82 по радиоканалам СЦР31.
От БА 42 управляемых ТПЕ в режиме реального времени поступает в блок 83 информация о навигационной координате и о значении текущей скорости и направлении движения, пройденном пути нарастающим итогом с начала движения по маршруту, текущем управлении локомотивом и работоспособности устройств ТПЕ.
При этом блок 81 рассчитывает длину ПЕ и сравнивает ее с указанной в маршрутном задании, контролирует корректность срабатывания рельсовых цепей в процессе движения ПЕ, ведет учет весовой нагрузки на каждый изолированный участок. В случае некорректной работы рельсовых цепей, блок 81 принимает решение о ложной свободности или ложной занятости участка с разрешением движения с пониженной скоростью или принудительной остановки ТПЕ на маршруте, а также передает через блок 66 сопряжения в АРМ ШНС 67 и СТДМ 40.
Информацию о сбое или отказе в работе СЦ35 процессоры 59и 68 передают в процессор 78, а также через блок 66 в СТДМ 40.
В случае аварийной остановки ТПЕ процессор 78 передает соответствующее сообщение в СЦ35 об ограждении ПЕ и в блок 80 для отображения на модели дислокации. При этом через блок 79 и УМВ34 процессор 78 направляет в ЦУ1 информацию о необходимости корректировки оперативного план-графика.
Информацию о несоответствия длины ПЕ наряд-заданию процессор 78 также направляет в блок 80 для отображении на модели дислокации с последующей передачей в ЦУ1 для принятия соответствующего решения и учета.
При изменении маршрутного задания, например продлении маршрута, процессор 78, получив подтверждение о продлении от процессора 68 через узел 66 сопряжения, формирует новое маршрутное задание и направляет его в блок 82, который передает по радиоканалу СЦР 31 в БА 42 новое задание. Процессор 78 также отменяет процедуру подтверждения задания от блока 81 и передает ему для идентификации и контроля новое задание. При выявлении нарушений в выполнении маршрутного задания или отказа устройств ТПЕ блок 81 информирует процессор 78, который принимает решение о коррекции маршрута или скоростного режима, вплоть до принудительной остановки и отдачи команды в блоки 59 или 68 об ограждении места остановки ТПЕ. Одновременно процессор 78 информацию об этом событии передает в блок 80, где оно фиксируется в модели дислокации.
В свою очередь блок 80 изменения в модели дислокации передает через УМВ 34, шлюз 57 в блоки 54 для коррекции модели, в блок 56 для отмены наряд-заданий и в блок 47 для корректировки оперативного плана и передачи сообщений по каналам сети 5 передачи данных в аппаратно-программное устройство АРМ14ТЧМИ для вызова машиниста на локомотив.
При выполнении маневровых или поездных операций с участием составителей, сигналистов или других работников железной дороги в наряд-задании указывается маршрут для ТПЕ, номер прикрепленного носимого терминала 43 и назначение, включающее место и перечень операций. В маршрутном задании, формируемом процессором 78 для ТПЕ указывается номер прикрепленного носимого терминала 43 исполнителя. В этом случае алгоритм управления движением ТПЕ меняется. Первичная инициализация прикрепленного к ТПЕ носимого терминала 43 выполняется по команде блока 48 ЦУ1 для поездных операций или блока 47 для горочных или маневровых операций, передаваемой с упреждением относительно ее начала, определяемого по техническим нормам с учетом расстояния между расположением исполнителя и местом выполнения операции.
Команда инициализации включает номер терминала 43, назначение, номер ТПЕ, место назначения (путь или участок) и передается блоками 47 или 48 ЦУ1 через шлюз 57 в УМВ34, который преобразует ее в кодограмму и передает ее по сети 5 в СЦР31 для передачи на терминал 43 исполнителя.
После получения подтверждения от исполнителя о готовности блок 47 или 48 инициирует выдачу наряд-задания ТПЕ с номером терминала 43 исполнителя из блока 56 через шлюз 57, УМВ31 и блок 79 в процессор 78. Дальнейшие перемещения исполнителя с прикрепленным носимым терминалом 43 контролирует блок 81 СУД38ТПС, который через процессор 78, блок 79 и УМВ34 передает идентификатор носимого терминала 43 исполнителя в систему 26 видеонаблюдения как зарегистрированный объект наблюдения. При отсутствии подтверждения от исполнителя, передачу команды инициализации терминала 43 повторяют. Второе отсутствие подтверждения приводит к регистрации нарушения техпроцесса и корректировке наряд-задания блоками 47 или 48 по назначению, а также уведомлением соответствующего линейного предприятия о необходимости замены исполнителя.
Случаи нарушения техпроцесса регистрирует блок 54 ЦУ1 по каждой ТПЕ, технологической операции, линейному предприятию и исполнителю и передается в блок 58, который осуществляет обработку полученной информации и включает в отчет по работе станции.
После первичной инициализации носимого терминала 43 путем его прикрепления к ТПЕ, он регулярно через 1-2с. передает по каналам СЦР31 кодограммы со своим адресом, навигационной координатой и номером ТПЕ. Блок 83 принимает, расшифровывает эти сообщения и передает блоку 81 для идентификации, который в свою очередь формирует сообщения о местоположении и перемещении исполнителя, прикрепленного ПЕ, и передает блоку 85. Блок 85 подтверждает первоначальную команду, дополненную координатой и параметрами движения ТПЕ прикрепленной к исполнителю, преобразует ее в оцифрованное речевое сообщение и передает ее в блок 82, который дополняет ее дифференциальной поправкой, поступающей из блока 86, шифрует и в виде кодограммы передает по каналам СЦР31 на терминал 43. Речевое сообщение воспроизводится исполнителю через Bluetooth.
Блок 81 получает маршрутное задание для ТПЕ, сформированное процессором 78, дополненное номером прикрепленного носимого терминала 43.
Кроме того, блок 81 проверяет условия безопасности проведения операции, в том числе определяет местоположения исполнителя по навигационной координате носимого терминала 43 и данными от системы 26 видеонаблюдения относительно управляемой ПЕ. При выполнении условий безопасности блок 81 формирует команду разрешения передачи управления ТПЕ на носимый терминал 43.
Данную команду блок 81 передает в блок 85, который преобразует ее в текстовую и речевую команду и направляет в блок 82 для передачи по сети СЦР 31 на носимый терминал 43. Одновременно блок 81 формирует команду ТПЕ, разрешающую управление движением с прикрепленного носимого терминала 43, которая передается через блок 82 по каналам СЦР31 БА 42 ТПЕ. При задержке ТПЕ передача управления на терминал 43 откладывается до ее подхода к месту операции. При задержке исполнителя, относительно расчетного времени, ТПЕ останавливается и ожидает подхода исполнителя. Факт опоздания исполнителя регистрирует блок 80 и передает через процессор 78 в блок 80, который вводит изменения в модель дислокации. Кроме того, информацию о нарушении технологической операции блок 80 через УМВ34 и шлюз 57 передает в блок 54.
Исполнитель управляет ТПЕ в объеме перечисленных выше функций и в пределах разрешенных скоростей движения до завершения выполнения операции или ряда последовательных операций, предусмотренных одним или несколькими смежными наряд-заданиями. После завершения работ на терминал 43 и БА42 ТПЕ поступают команды от блока 81 аналогичным образом о прекращении режима управления ТПЕ с носимого терминала 43. Исполнитель переводит терминал 43 в спящий режим и отправляется к месту постоянной дислокации. Нарушения, обусловленные падением или ухудшением состояния исполнителя во время управления ТПЕ, регистрирует блок 81 и аналогичным образом передаются в блок 54. В случае возникновения опасности для жизни исполнителя носимый терминал 43 автоматически формирует команду экстренной остановки ТПЕ. Блок 81 фиксирует экстренную остановку ТПЕ и состояние исполнителя. Если в течение установленного времени исполнитель не подтвердит готовность к продолжению операции блок 81 информирует процессор 78 об отмене операции, который через блок 66 дает команду СЦ 35 об ограждении места остановки, отражает это в модели блока 80 и далее в модели блока 54 и на терминале 52 станционного диспетчера, через блоки 79, 34 и 47 или 48 запрашивает корректировку наряд-задания и замену исполнителя.
Работа с предупреждениями пассажиров и мест проведения работ по обслуживанию устройств инфраструктуры СУ 39 СУД38ТПС осуществляет по данным АСУВОП 30. В блок 84 АСУВОП 30 передает предупреждения, предусматривающие остановку ТПЕ, проследование с пониженной скоростью и проследование с подачей звукового сигнала, а также предупреждения, требующие голосового оповещения пассажиров и работников о приближении ПЕ. Последний вид оповещения выполняется блоком 80, который на основе информации из блока 84 о вступлении ПЕ в активную зону формирует сообщение и передает его в систему 26 оповещение для объявления по станции или району станции по громкоговорящей связи.
Для выдачи предупреждений устройствам ТПЕ блок 81 на основе информации из блока 84 включает предупреждения в маршрутное задание ТПЕ и предупреждает о нем исполнителей носимых терминалов 43 прикрепленных к данной ТПЕ, находящихся в режиме управления через блок 85, формирующий и оцифровывающий голосовое и текстовое сообщении для передачи через блок 82 по радиоканалу СЦР31 на носимые терминалы 43.
Предупреждения сотрудникам инфраструктурных линейных предприятий, работающих на пути, поступают из блока 84 в блок 83, который передает в блок 85 сообщение о приближении ПЕ. Блок 85 формирует команды, передаваемые через блок 82 по радиоканалу СЦР31 на носимые терминалы 43 исполнителей, указанные в предупреждении.
Непосредственное управление устройствами ТПЕ осуществляет БА 42 СУД38ТПС. Кодограмма с маршрутным заданием передается из блока 82 по радиоканалу СЦР31 в приемопередатчик 90 БА 42, расшифровывается и по локальной сети ТПЕ вводится в бортовой контроллер 87. Дифференциальная поправка, переданная вместе с маршрутным заданием из блока 90, поступает в блок 89, который вычисляет дифференциальную навигационную координату ТПЕ и передает бортовому контроллеру 87. Бортовой контроллер 87 на основание полученной информации и данных о текущих параметрах движения и устройств управления, передаваемых с выходов блоков 93 и 94, определяет режим управления с машинистом или без машиниста путем опроса коммутатора 95, формирует каждые 1-2с. ответное сообщение, подтверждающее прием маршрута, а также включает в него данные о параметрах движения, о местонахождении и функционировании устройств ТПЕ и передает в приемопередатчик 90, который по радиоканлу СЦР 31 направляет в блок 83 СУ39.
Контроллер 87 параметры маршрута движения и состава передает в блок 93, который рассчитывает тормозную кривую и данные о ней передает контроллеру 87. Контроллер 87 на каждом этапе движения определяет значение допустимой скорости на основании расчетных значений тормозной кривой и действующих предупреждений. Команда на начало и направление движения поступает с маршрутным заданием при автономном режиме управления без машиниста, либо задается машинистом штатным порядком или исполнителем при помощи носимого терминала 43 в соответствии с заданным маршрутом. Исполнение скоростного режима контролирует контроллер 87 по данным блока 94, который регистрирует показания датчиков 97-99 тока, скорости и направления движения и давления, и по данным блока 93 о реализуемом режиме управления.
Для информирования локомотивной бригады контроллер 87 формирует сообщения о текущей длине маршрута и скорости движения, преобразуемые блоком 96 в речевые команды. Для исполнителя с носимым терминалом 43, привязанным к ТПЕ, при управлении ТПЕ в процессе движения блок 92 кодирует заданным образом и передает через приемопередатчик 90 по радиоканалу СЦР31 на носимый терминал 43 сообщения о текущей длине маршрута и скорости движения с передачей и через Bluetooth. В нецентрализованной зоне исполнителю посредством носимого терминала 43 передают аналогичным образом сообщения о скорости и позиции тяги или торможения ТПЕ.
Все режимы управления ТПЕ в централизованной зоне станции предусматривают приоритет маршрутного задания и допустимого скоростного режима. В случае нарушения допустимого режима скорости контроллер 87 формирует соответствующие команды, корректирующие режимы движения, и передает их в блок 93 для исполнения, а при превышении допустимой скорости на предельное значение отключает блок 93 и формирует команду на экстренное торможение и передает ее в блок 94 для включения блока 101.
Принудительная остановка ТПЕ может выполняться по команде контроллера 87 при отсутствии маршрутных заданий от СУ39 в течение трех циклов связи подряд, отказе каналов связи между контроллером 87 и блоками 93 и 94, а также при отказе любого из датчиков 97-99 или скатывании, когда ТПЕ начинает двигаться без команды на движение.
При работе ТПЕ с локомотивной бригадой машинист переключает коммутатор 95 в режим работы с машинистом, при этом блоки 102 и 103 коммутатор 95 подключает к соответствующим входам блока 94 для контроля бодрствования и бдительности машиниста. При срабатывании блоков 102 или 103 блок 94 формирует команду экстренного торможения ТПЕ и передает ее в блок 101.
Особенностью работы ТПЕ в режиме с машинистом является идентификация его личности, которая устанавливается по индивидуальной кассете, вставляемой в блок 92 и подтверждается наряд-заданием.
Блок 88 - приемник кодов АЛС и шлейфов САУТ используется преимущественно при движении по перегонам.
Контроллер 87 о начале и окончании любого полурейса формирует соответствующее сообщение и передает в блок 93 для включения блока 104, осуществляющего управление прожекторами и звуковыми сигналами.
Блоки 105 и 106 управления автосцепками используются по командам блока 93 для прицепок и отцепок ТПЕ от вагонов, при этом блок 93 осуществляет управления на основании показаний датчиков 96 приближения.
Выполнение профилактических и ремонтных полевых работ инфраструктурными линейными предприятиями регламентируется предупреждениями от АСУВОП30. С упреждением к заявленному времени проведения полевых работ АСУВОП30 передает предупреждение в блок 84 СУ39.
Контроль хода выполнения работ и формирование сообщения с предупреждением исполнителей осуществляет блок 83. Получив предупреждение из блока 84, блок 83 контролирует перемещение исполнителей и причастных ТПЕ по станции до места выполнения работ, Регистрирует команду исполнителя о начале работ и, начиная с этого момента, через блоки 85 и 82 посылает сообщения на носимые терминалы 43 исполнителей, предупреждая о приближении ПЕ, а через блоки 81 и 82 информирует БА 42 ТПЕ о месте проведения работ.
Бортовой контроллер 87 БА42 ТПЕ в режиме управления без машиниста, получив по цепям СЦР31 предупреждение о месте проведения работ через приемопередатчик 90, формирует команду блоку 93 о скоростном режиме проследования места работ и подаче звуковых сигналов. Блок 93 автоматически реализует скоростной режим, задаваемый контроллером 87, формирует команды управления и передает их в блок 104. для подачи звуковых сигналов.
В режиме управления с машинистом контроллер 87 формирует сообщение о предупреждении и передает его на монитор блока 91, информируя машиниста, и одновременно передает команду в блок 96 на вывод речевого сообщения о предупреждении. В обоих случаях контроль выполнения маршрутного задания, скоростного режима исправности функционирования оборудования ТПЕ и подачи звуковых сигналов осуществляет контроллер 87.
Информацию о проведении профилактических и ремонтных работ по хозяйству автоматики и телемеханики блок 83 передает через блок 80, процессор 78 и блок 66 сопряжения в СТДМ 40 и через блоки 80, УМВ34и сеть 5 передачи данных - в систему ЕСМА 24 и в аппаратно-программные устройства АРМ линейный хозяйств по назначению.
Таким образом, способ управления технологическим процессом железнодорожной станции обеспечивает безопасность движения при выполнении поездных, маневровых и горочных операций; безопасность труда работников железнодорожного транспорта путем применения малолюдных и безлюдных технологий, индивидуального информирования людей на путях о приближении подвижного состава, подачи звуковых сигналов, снижения скорости роспуска и экстренной остановки ТПЕ при предупреждениях, происшествиях или ухудшении состояния здоровья исполнителей; управление тяговым подвижным составом ТПЕ на территории станции и прилегающих путях без участия локомотивных бригад; задание маршрутов в поездном, маневровом и горочном режимах без дежурных по станции и сортировочной горке; автоматическое выполнение операций планирования, задания маршрутов движения и управления ТПЕ на маршруте, технического нормирования, документирования и отчетности при управлении технологическим процессом на станции, что позволяет существенно снизить капитальные затраты на организацию технологического процесса на станции, повысить пропускную способность станции, снизить потери от отказов и сбоев напольных устройств, улучшить качество обслуживания и дисциплину работников инфраструктурных линейных предприятий, - обеспечить прозрачность и объективность технологического процесса станции для систем управления регионального и сетевого уровней, ввести безбумажный документооборот на железнодорожной станции, обеспечить контроль своевременной профилактики, ремонта и замены элементов путевого развития станции исключает существенное влияние на безопасность движения и эффективность технологического процесса «человеческого фактора».
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления маневровыми локомотивами | 2016 |
|
RU2622524C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛОКОМОТИВОВ ПРИ МАНЕВРОВОЙ РАБОТЕ | 2014 |
|
RU2567099C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| СПОСОБ И КОМПЛЕКСНАЯ СИСТЕМА БЕЗОПАСНОСТИ (КСБ) ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЦЕЛЬНЫМ ТОРМОЖЕНИЕМ ПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2392133C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МАНЕВРОВЫХ ПЕРЕДВИЖЕНИЙ | 2017 |
|
RU2672348C1 |
| Комплексная система управления маневровыми локомотивами | 2019 |
|
RU2725575C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| Способ управления технологическим процессом сортировочной станции с контролем и перераспределением трудовых ресурсов и система для его осуществления | 2024 |
|
RU2839171C1 |
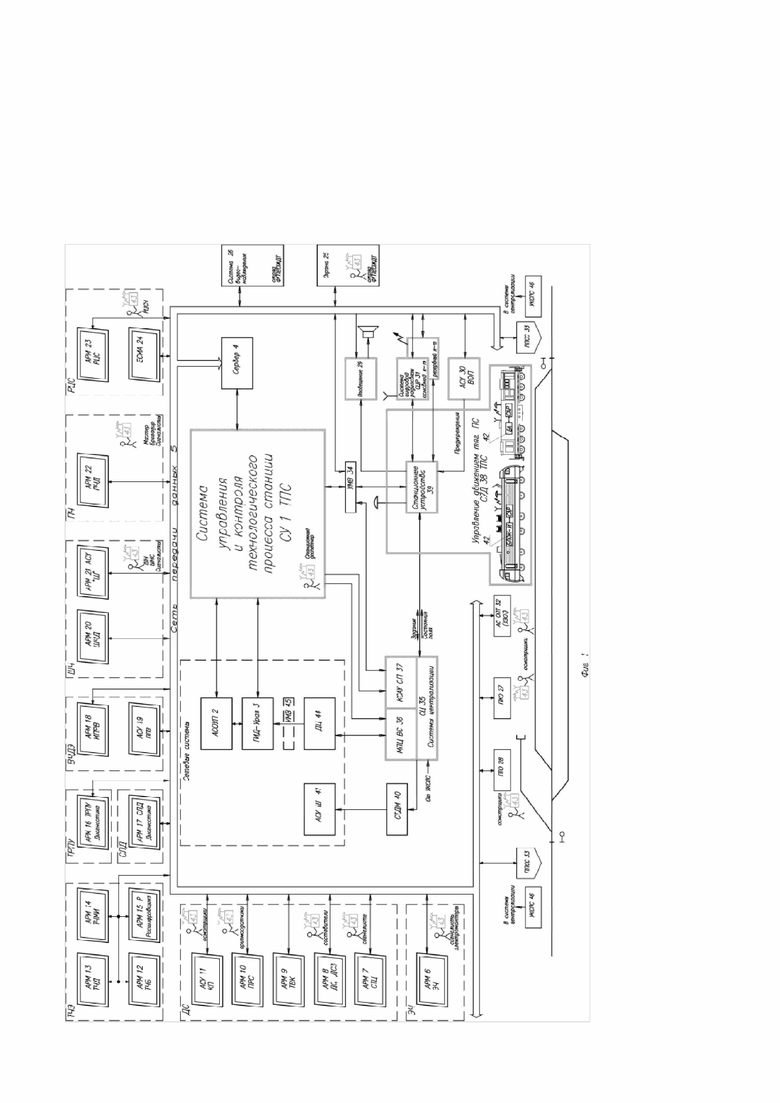

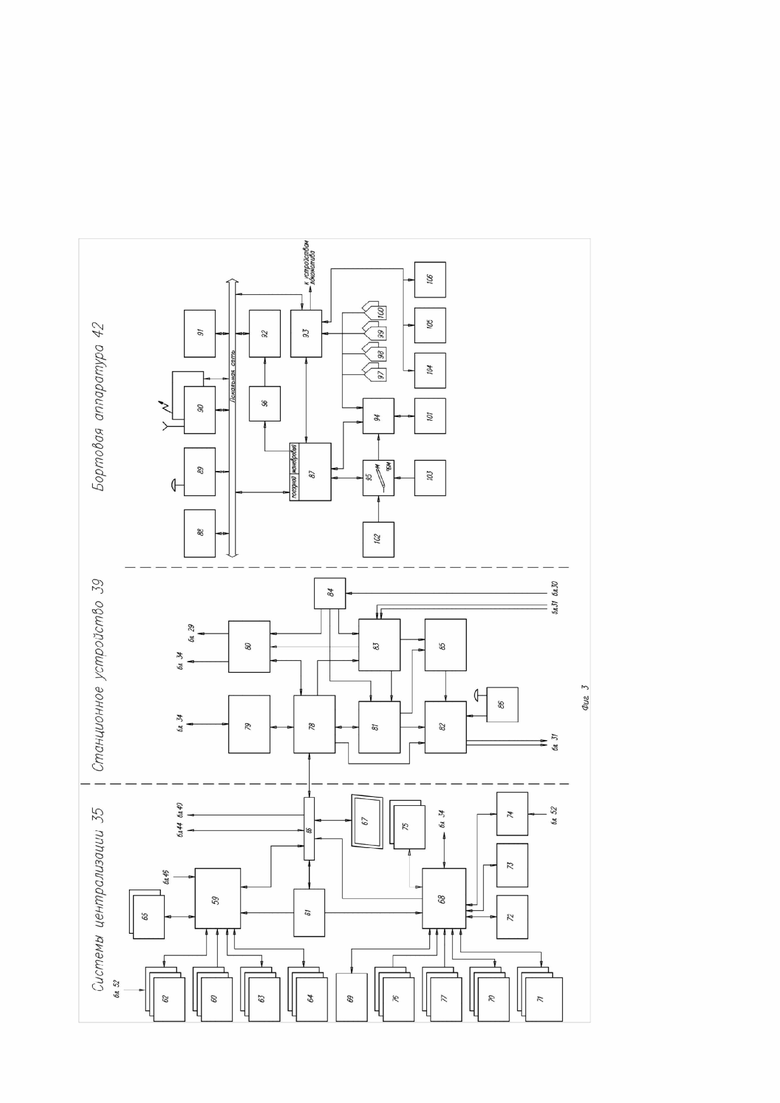
Изобретение относится к средствам управления технологическим процессом железнодорожной станции. В способе по данным модели технологического процесса центр управления и контроля формирует протоколы работы технических средств системы микропроцессорной централизации, комплексной системы автоматизации управления сортировочным процессом, системы управления движением тягового подвижного состава, системы опробования тормозов грузовых составов, системы технического обслуживания грузовых вагонов, коммерческого осмотра поездов и вагонов, системы видеонаблюдения, системы оповещения, системы передачи данных и системы цифровой радиосвязи, сформированные протоколы передает по каналу передачи данных аппаратно-программным устройствам автоматизированных рабочих мест линейных предприятий по кругу ведения, а также протоколы работы станции, локомотивных бригад и исполнителей, которые передает по каналу передачи данных аппаратно-программным устройствам автоматизированных рабочих мест линейных предприятий по кругу ведения. Достигается повышение безопасности движения. 7 з.п. ф-лы, 3 ил.
1. Способ управления технологическим процессом железнодорожной станции, заключающийся в том, что на станции центр управления и контроля в режиме реального времени взаимодействует с аппаратно-программными устройствами системы микропроцессорной централизации и комплексной системы автоматизации управления сортировочным процессом, системы управления движением тягового подвижного состава, системы сетевого уровня управления, системы опробования тормозов грузовых составов, системы технического обслуживания грузовых вагонов, коммерческого осмотра поездов и вагонов, системы видеонаблюдения, системы оповещения, автоматизированной системы выдачи и отмены предупреждений, а также с аппаратно-программными устройствами автоматизированных рабочих мест линейных предприятий, участвующих в технологическом процессе, и с носимыми терминалами исполнителей технологических операций на станции, по результатам взаимодействия в режиме реального времени автоматически формирует динамическую модель технологического процесса на базе цифровой модели станции с данными на текущей момент времени о состоянии устройств автоматики и телемеханики, о местоположении и параметрах движения подвижных единиц, о дислокации исполнителей, о параметрах входного потока подвижных единиц на станцию, о номерах прибывающего подвижного состава, техническом состоянии его вагонов, креплении и сохранности грузов, о начале, окончании и выполнении технологических операций, на основе информации о подходе поездов к станции, планов расформирования и формирования грузовых поездов, расписания движения пассажирских и пригородных поездов формирует суточный план-график работы станции и согласовывает его с линейными предприятиями, участвующими в технологическом процессе, которые по кругу ведения для выполнения каждой технологической операции суточного плана-графика осуществляют привязку исполнителей с указанием для тяговых подвижных единиц – идентификационных номеров бортовых систем управления тяговых подвижных единиц, для локомотивных бригад – идентификационных номеров электронных систем регистрации, для остальных исполнителей, обслуживающих движение, осуществляющих профилактику и ремонт инфраструктуры станции, – идентификационных номеров индивидуальных носимых ими терминалов, на основе суточного плана-графика с учетом информации о текущих параметрах модели технологического процесса, обновляемых норм технического нормирования для станции и прогноза на заданный период времени подхода поездов и вагонов центр управления и контроля формирует оперативный предварительный план-график работы станции, детализируя его на имитационной модели до не менее трех вариантов адресных наряд-заданий тяговым подвижным единицам и прикрепленным исполнителям линейных предприятий, а также наряд-заданий исполнителям для выполнения технологических операций по подготовке подвижных единиц к переработке и отправлению, и передает его в аппаратно-программное устройство автоматизированного рабочего места станционного диспетчера одновременно с динамической моделью технологического процесса, на основе информации о текущих параметрах модели технологического процесса станционный диспетчер выбирает оптимальный вариант выполнения наряд-заданий и посредством аппаратно-программного устройства направляет в центр управления и контроля, который с упреждением выполнения передает наряд-задания через устройство межсетевого ввода-вывода, осуществляющего безопасное шлюзование информации, для реализации и контроля аппаратно-программным устройствам системы микропроцессорной централизации, комплексной системы автоматизации управления сортировочным процессом, системы управления движением тягового подвижного состава, а также носимым терминалам исполнителей, участвующих в технологическом процессе, при этом система микропроцессорной централизации в соответствии с наряд-заданиями автоматически задает не противоречащие требованиям безопасности движения поездные и маневровые маршруты синхронно с ходом выполнения технологического процесса на станции и/или по командам систем внешнего управления, комплексная система автоматизации управления сортировочным процессом в соответствии с наряд-заданием в автоматическом режиме осуществляет задание и замыкание маневровых маршрутов движения, а также реализует программу и очередность роспуска составов, система управления движением тягового подвижного состава формирует допустимые зоны перемещения и скоростные режимы тяговых подвижных единиц, контролирует путем обмена информацией по каналу радиосвязи с бортовыми устройствами управления тяговых подвижных единиц и с носимыми терминалами исполнителей выполнение и возможность продвижения наряд-заданий с соблюдением технологии работ, безопасности движения, охраны труда и здоровья пассажиров и исполнителей, причем по результатам выполнения оперативного плана-графика центр управления и контроля в режиме реального времени автоматически обновляет данные динамической модели технологического процесса, с учетом текущих параметров технологического процесса осуществляет техническое нормирование станции, а также формирует план работы по техническому обслуживанию и ремонту подвижных единиц и объектов инфраструктуры станции по фактическому состоянию.
2. Способ по п. 1, отличающийся тем, что по данным модели технологического процесса центр управления и контроля формирует протоколы работы технических средств системы микропроцессорной централизации, комплексной системы автоматизации управления сортировочным процессом, системы управления движением тягового подвижного состава, системы опробования тормозов грузовых составов, системы технического обслуживания грузовых вагонов, коммерческого осмотра поездов и вагонов, системы видеонаблюдения, системы оповещения, системы передачи данных и системы цифровой радиосвязи, сформированные протоколы передает по каналу передачи данных аппаратно-программным устройствам автоматизированных рабочих мест линейных предприятий по кругу ведения.
3. Способ по п.2, отличающийся тем, что на основе динамической модели технологического процесса центр управления и контроля формирует протоколы работы станции, локомотивных бригад и исполнителей, которые передает по каналу передачи данных аппаратно-программным устройствам автоматизированных рабочих мест линейных предприятий по кругу ведения.
4. Способ по п. 1, отличающийся тем, что системы технического обслуживания грузовых вагонов, коммерческого осмотра поездов и вагонов дополнительно включают аппаратно-программные устройства интегрированных постов автоматизированного приема коммерческого и технического осмотра и диагностики подвижного состава и считывания номеров вагонов, установленные на границах станции, и пункты коммерческого и технического осмотра, которые по каналу радиосвязи связаны с носимыми терминалами исполнителей - осмотрщиков и приемосдатчиков.
5. Способ по п. 1, отличающийся тем, что система управления движением тягового подвижного состава передает исполнителю функции управления привязанной тяговой подвижной единицей для выполнения операций, предусмотренных наряд-заданиями, с соблюдением требований безопасности движения и охраны труда, контролирует выполнение операции управления, а после исполнения передает на носимый терминал исполнителя соответствующее сообщения и переключает управление тяговой подвижной единицей на себя.
6. Способ по п. 1, отличающийся тем, что контроль перемещения тяговых подвижных единиц система управления движением тягового подвижного состава осуществляет по данным навигационной системы, системы видеонаблюдения, системы микропроцессорной централизации и комплексной системы автоматизации управления сортировочным процессом, а контроль перемещения исполнителей – по данным навигационной системы и системы видеонаблюдения.
7. Способ по п. 1, отличающийся тем, что система управления движением тягового подвижного состава с учетом данных автоматизированной системы выдачи и отмены предупреждений корректирует скоростные режимы тяговых подвижных единиц, данные о которых передает в их бортовые устройства управления, при этом передает на носимые терминалы исполнителей, находящихся в зоне движения, а также в систему оповещения сообщение о приближении подвижной единицы.
8. Способ по п. 1, отличающийся тем, что носимый терминал выполнен в виде смартфона с возможностью закрепления на одежде исполнителя и снабжен приемником навигационных сигналов, наушником и микрофоном, а также манипулятором для управления скоростью тяговой подвижной единицы и датчиками падения и состояния здоровья исполнителя.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛОКОМОТИВОВ ПРИ МАНЕВРОВОЙ РАБОТЕ | 2014 |
|
RU2567099C1 |
| Устройство зрительного зала для театра | 1929 |
|
SU25713A1 |
| Демпферная обмотка синхронной машины | 1952 |
|
SU95623A1 |
| CN 104773191 A, 15.07.2015 | |||
| A | |||
| D’Ariano, M | |||
| Pranzo, and A | |||
| Hansen, "Conflict resolution and train speed coordination for solving real-time timetable perturbations," IEEE Trans | |||
| Intell | |||
| Transp | |||
| Syst., том 8, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Стр | |||
| Гидравлическая или пневматическая передача | 0 |
|
SU208A1 |

