Изобретение относится к автоматике и телемеханике на железнодорожном транспорте и предназначено для автоматизации процесса управления маневровыми передвижениями на железнодорожных станциях.
Известна система планирования по предопределенному промежутку времени использования средств в грузовой железнодорожной системе, содержащая базу норм механизма вывода для стратегического ограничения графика в движении поезда, основанного на определенных пользователем грузовых железнодорожных операционных правилах и оптимизации предложенных графиков при смягченных условиях ограничения, базу ограничений механизма вывода для развития детального плана движения, основанного на оптимизации в пределах предопределенной терпимости затрат плана движения, стратегическое ограничение графика основано на упомянутой базе норм (US 5623413, 22.04.1997).
Известна система железнодорожной сигнализации, содержащая устройство контроля для управления движениями железнодорожных транспортных средств на железнодорожном пути. Система включает память для хранения данных, определяющих физические характеристики железнодорожного пути и местоположений транспортных средств, первый процессор для обработки данных, хранящихся в памяти, чтобы определить допустимые движения транспортных средств, первый интерфейс для передачи данных движения транспортных средств, определяющий допустимые движения транспортных средств, единицу защиты, которую несет по крайней мере одно из транспортных средств для вызова транспортного средства, перемещающегося под управлением устройства контроля, второй интерфейс, получающий данные движения, касающиеся транспортного средства, вторую память для хранения географических данных, определяющих физические характеристики железнодорожного пути, второй процессор для обработки данных движения в зависимости от географических данных, чтобы определить операционную скорость для транспортного средства, и единицы операции для управления перемещением транспортного средства на определенной операционной скорости (US 5437422, 01.08.1995).
Из заявки WO 2005/082696, 09.09.2005, известна железнодорожная система слежения вагона, содержащая бортовую систему коммуникации, систему определения местоположения и приемопередатчик. Система коммуникации включает процессор, отзывчивый к выполняемой программе для операционного действия приемопередатчика. Память процессора включает отдаленно адресуемую базу данных программного обеспечения, доступную в соответствии с выполнимой программой для установки события сообщения в ответ на по крайней мере одно из отобранного времени, изменение в географическом местоположении, расширенное время в географическом местоположении, подход к указанному географическому местоположению, сцепление/разъединение вагона со специфическим локомотивом и командой для сообщения. Вагон включает устройство считывания AEI для считывания данных AEI на других транспортных средствах и передачи данных, указывающих по крайней мере местоположение других транспортных средств рельса.
Известна централизованная диспетчерская система с распределенными контролируемыми пунктами, содержащая распределенные контролируемые пункты и центральный пункт управления с рабочим местом поездного диспетчера, объединенные внешней локальной сетью. Резервированный центральный блок управления каждого распределенного контролируемого пункта управления состоит из основного комплекта, резервного комплекта и модуля диагностики, которые связаны между собой. Каждый из упомянутых комплектов состоит из модуля управления и модуля связи. Модуль управления содержит однокристальную электронно-вычислительную машину, запоминающие устройства, устройства индикации, устройство сброса, устройство отображения, буфер ввода-вывода, устройство ввода, устройство согласования с локальной сетью, датчик температуры, счетчик времени, устройство преобразования интерфейса, устройство управления упомянутым комплектом и преобразователь напряжения (RU 2240245, 20.11.2004).
Известно горочное программно-задающее устройство, содержащее блок печати, скоростемеры надвига и скатывания, подключенные к соответствующим входам блока определения момента отрыва, формирователь параметров маршрутов и отцепов, блок вычисления скорости роспуска, блок кодирования и индикации, соединенные последовательно. К входу блока определения факта расцепа подключен радиотехнический датчик скорости, а к выходу - блок контроля правильности расцепки. Первый выход блока кодирования и индикации является выходом в устройства горочной автоматической централизации, а второй выход подключен к входу блока коммутации. Выход последнего является выходом устройства к горочному светофору. Устройство снабжено блоком моделирования сортировочного процесса, блоком задания осности, блоком определения текущего веса состава, блоком задания скорости роспуска, блоком дистанционного управления, блоком определения направления движения (RU 2157773, 20.10.2000).
В патенте RU 2159716, 27.11.2000, описано устройство для маневровой автоматической локомотивной сигнализации, содержащее бортовое устройство контроля передачи сообщений, передающие устройства, постовые устройства, предназначенные для определения маршрута по состоянию датчиков устройств электрической централизации и для формирования сигналов изменения значения допустимой скорости. Имеются блоки входных данных, контроля выполнения маршрута, формирования и включения аварийного приказа, контроля радиоканала с таймерами и определения координат. Блок контроля выполнения маршрута связан входом с датчиками устройств электрической централизации, а выходами подключен к блоку включения аварийного приказа и блоку входных данных.
Наиболее близким аналогом является система маневровой автоматической локомотивной сигнализации, содержащая станционную и бортовую аппаратуры. Станционная аппаратура состоит из контроллера опроса, электрической централизации и содержит стационарный формирователь, согласующие устройства, приемопередающие устройства, два автоматизированных рабочих места дежурных по станции, адаптер связи, принтер, блок питания радиомодема, источники бесперебойного питания, сервисное оборудование, курвиметр. В состав бортовой аппаратуры входит: бортовой компьютер на базе промышленного одноплатного компьютера, клавиатура, блок переключателей, блок индикации, датчики импульсов, приемопередающее устройство, антенное оборудование, плату питания (Г.Филатов, А.Павлов. «Одноплатный компьютер PC-510 в бортовой аппаратуре системы локомотивной сигнализации», журнал «Современные технологии автоматизации», №4, 2000 г., с.54-59).
Недостатком вышеперечисленных систем является недостаточная степень автоматизации управления технологическими процессами, недостаточная точность определения местоположения подвижных объектов, недостаточная информативность для решения оптимизационных задач.
Задачей изобретения является создание системы маневровой автоматической локомотивной сигнализации, обеспечивающей повышение безопасности движения на ж.д. станциях, контроль местоположения и передвижения маневровых локомотивов на станции, создание информационной платформы для оптимизации работы станции.
Технический результат, достигаемый при реализации данного изобретения, заключается в повышении степени автоматизации и производительности маневровой работы на железнодорожных станциях за счет предотвращения движения локомотива (состава) со скоростью выше допустимой, за счет автоматической остановки локомотива (состава) перед запрещающим сигналом светофора, сокращении межоперационных интервалов и маршрутных пробелов локомотива за счет точного контроля его местоположения и фактической скорости движения.
Указанный технический результат достигается в системе маневровой автоматической локомотивной сигнализации, состоящей из бортовой аппаратуры, станционного устройства и сервисного оборудования, предназначенного для проверки работоспособности, диагностики и выявления дефектов в бортовой аппаратуре и станционном устройстве. Станционное устройство включает управляющий вычислительный комплекс, который обеспечивает контроль поездной ситуации на основе данных, получаемых от устройств электрической централизации посредством контроллера сбора данных, обеспечивает взаимодействие с бортовой аппаратурой и сервисным оборудованием по цифровому радиоканалу, обеспечивает контроль поддержки радиосвязи с локомотивами и осуществляет контроль передвижения подвижных единиц, кроме этого, станционное устройство включает контроллер сбора данных, обеспечивающий сбор данных о состоянии объектов контроля путем циклического опроса, и передачи этой информации на сервисное оборудование, при этом бортовая аппаратура включает бортовой контроллер, предназначенный для реализации всех функциональных возможностей бортовой аппаратуры, блок индикации, блок управления, блок переключателей, датчики импульсов и радиостанцию, принимающую информацию на процессорный модуль бортового контроллера и осуществляющую обмен информацией с радиостанцией, входящей в состав станционного устройства, и радиостанцией, входящей в состав сервисного оборудования, имеющего двухуровневую архитектуру, на верхнем из которых реализуются все функциональные возможности при проведении диагностики бортовой и станционной аппаратуры, а на нижнем располагаются пульт контроля бортовой аппаратуры и пульт контроля станционного устройства.
Верхний уровень сервисного оборудования представляет собой промышленный компьютер с подключенной радиостанцией, на котором осуществляют проверку радиоканала связи.
На нижнем уровне сервисного оборудования располагается пульт контроля бортовой аппаратуры, осуществляющий проверку бортового контроллера и измерителя скорости бортовой аппаратуры и пульт контроля контроллера сбора данных и адаптера, осуществляющий проверку устройств из состава станционной аппаратуры.
Сервисное оборудование работает в режиме многократного циклического применения.
Бортовая аппаратура осуществляет постоянный мониторинг состояния движения локомотива, состояния электрооборудования локомотива, данных радиоканала и вывод на монитор оперативной информации, при этом информация о состоянии электрооборудования локомотива поступает через блок переключателей, а информация о фактической скорости движения поступает от датчиков импульса.
Управляющий вычислительный комплекс взаимодействует с другими станционными и локомотивными системами и системой спутниковой навигации.
Стационарное устройство и бортовая аппаратура в условиях эксплуатации связаны между собой по цифровому радиоканалу связи.
Сервисное оборудование связано со станционным устройством и бортовой аппаратурой по цифровому радиоканалу, а также имеет возможность кабельного соединения при проведении работ по проверке работоспособности составных частей системы.
Частотный диапазон радиостанций цифрового радиоканала составляет 150 МГц или 460 МГц.
Сущность изобретения поясняется чертежами, где на фиг.1 изображена структурная схема МАЛС; на фиг.2 - структурная схема станционного устройства; фиг.3 - структурная схема бортовой аппаратуры; фиг.4 - структурная схема сервисного оборудования.
Системой и ее составными частями оборудуются следующие объекты: посты электрической централизации (ЭЦ) железнодорожных станций; контрольно-измерительные пункты (КИП) дистанций сигнализации и связи; локомотивы; локомотивные депо.
Система МАЛС построена как интегрированная человеко-машинная система, функционирующая в темпе технологического процесса (реальном времени), и включает в себя оперативный технологический и обслуживающий персонал и комплекс программно-технических средств.
Общесистемные функции:
1) контроль кратковременной потери связи и сохранение передаваемой информации;
2) смена режимов работы локомотива по приказу станционных устройств;
3) выполнение приказов дежурного по станции (ДСП) на проезд запрещающего сигнала;
4) идентификация и определение соответствия маршрута и локомотива;
5) задание, продление, укорочение и отмена маршрутного задания;
6) создание маршрутов под запрещающий сигнал;
7) контроль допустимой скорости движения при выполнении маршрутных заданий, в том числе на местах производства работ;
8) подтверждение машинистом видимости вагонов на занятом пути и мест производства работ;
10) измерение длины состава;
11) определение расстояния до мест производства работ;
12) контроль движения состава в пределах последней занятой секции маршрутного задания относительно его "головы" и "хвоста";
13) выполнение маршрутов за пределы станции с выводом локомотива из системы;
14) срыв ЭПК: при неисправностях локомотивной аппаратуры или ее выключении; при несоблюдении допустимых скоростей движения кривой торможения; при превышении допустимой скорости движения; при подъезде к препятствию или месту работ, если от машиниста нет подтверждения о свободности пути; при попытке проезда запрещающего сигнала; при попытке проезда последнего стыка при типе маршрута "за сигнал"; по приказу станционных устройств или ДСП.
В систему МАЛС входят следующие подсистемы (фиг.1):
- устройство станционное маневровой автоматической локомотивной сигнализации 1 (СУ МАЛС), предназначенное для реализации функций и задач системы МАЛС, связанных с повышением безопасности движения при проведении маневровых работ на железнодорожных станциях, повышением безопасности при проведении работ на путях, а также с работой электрической централизации ЭЦ (релейно-процессорная централизация РПЦ, микропроцессорная централизация МПЦ, диспетчерская централизация ДЦ, ДК), действиями дежурных по станции, маневровых диспетчеров, электромехаников СЦБ и связи, персонала по техническому обслуживанию и ремонту и других причастных лиц;
- аппаратура бортовая маневровой автоматической локомотивной сигнализации 2 (БА МАЛС), предназначенная для приема и обработки данных, передаваемых с СУ МАЛС по каналу радиосвязи, для измерения скорости и направления движения локомотива, а также отображения необходимой информации для машиниста на экране монитора;
- оборудование сервисное маневровой автоматической локомотивной сигнализации 3 (СО МАЛС), предназначенное для проверки работоспособности, диагностики и выявления дефектов в СУ МАЛС и БА МАЛС.
СУ МАЛС рассчитано для работы в непрерывном круглосуточном режиме и обеспечивает прием от устройств ЭЦ (или от других систем) информации о состоянии рельсовых цепей, светофоров и положении стрелок, передачу информации о состоянии устройств ЭЦ и местоположении локомотивов, установку и снятие ограничений скорости движения в местах проведения работ на любом участке станции, регистрацию смен ДСП в журнале системы МАЛС, запись в журнале системы МАЛС событий, происшедших на станции, взаимодействие по цифровому радиоканалу с бортовой аппаратурой.
БА МАЛС рассчитана для работы в непрерывном круглосуточном режиме и обеспечивает контроль положения контроллера локомотива, контроль скатывания, измерение фактической скорости и направления движения локомотива, взаимодействие со станционными устройствами по цифровому радиоканалу.
СО МАЛС рассчитано для работы в режиме многократного циклического применения и обеспечивает проверку цифрового радиоканала связи, контроллера опроса и адаптера из состава СУ МАЛС, бортового контроллера, измерителя скорости БА МАЛС.
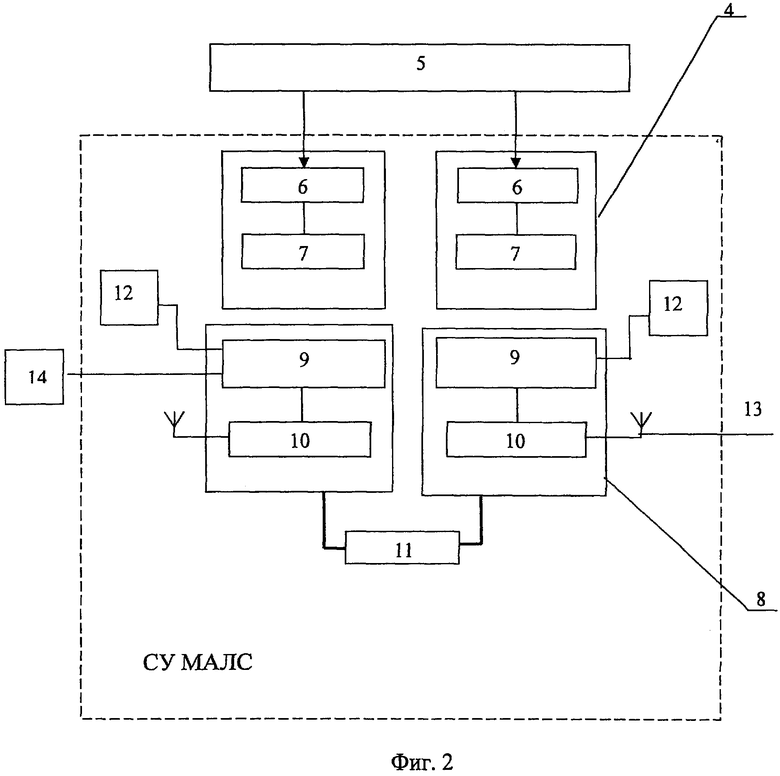
СУ МАЛС (фиг.2) состоит из управляющего вычислительного комплекса 8 (УВК), контроллера сбора данных 4 (КСД), электрической централизации 5 (ЭЦ), автоматизированного рабочего места электромеханика 12 (АРМ ШН) и автоматизированного рабочего места дежурного по станции 11 (АРМ ДСП).
УВК 8 обеспечивает прием, проверку и дешифрирование информации, поступающей с нижнего уровня; контроль (по отображению на мониторе) заданных с помощью устройств ЭЦ 5 маневровых и поездных маршрутов, состояние свободности или занятости путей, стрелочных секций, показания сигналов светофоров, положение стрелок; формирование телеграмм для подвижных объектов системы с учетом временных ограничений, введенных при необходимости дежурным по станции; взаимодействие с подсистемами БА МАЛС 2 и СО МАЛС 3; контроль поддержки радиосвязи с локомотивами, оборудованными БА МАЛС 2; передачу команд назначения и отмены исполнения маршрутов локомотивам, оборудованным БА МАЛС 2, введенным в МАЛС на данной станции; контроль передвижения подвижных единиц на станции; формировать и отменять команды временного ограничения скорости движения локомотивов при проследовании мест проведения работ; взаимодействие с другими станционными и локомотивными системами, не входящими в состав МАЛС, и системой спутниковой навигации 14. В состав УВК входят: два постовых контроллера 9 (ПК), два радиомодема 10, две антенны 13.
АРМ ШН 12 предназначено для предоставления электромеханику СЦБ (сигнализация, централизация, блокировка) оперативной информации о состоянии реле ЭЦ 5 и динамике их работы, самодиагностики, для хранения информационной базы МАЛС при необходимости и позволяет воспроизвести на экране монитора работу станции за выбранный период в необходимом масштабе времени.
АРМ ДСП 11 предназначено для предоставления дежурному по станции информации о состоянии исполнительных устройств ЭЦ 5, о местоположении подвижных объектов на станции и дает возможность ввода информации дежурному по станции.
Контроллер сбора данных 4 (КСД) обеспечивают сбор данных о состоянии объектов контроля (исполнительных устройств ЭЦ 5) путем циклического опроса, в его состав входят: две распределенные матрицы опроса 6 (РМО), два контроллера 7. Ввод данных осуществляется с использованием фронтового и тылового контактов реле через устройства гальванической развязки с учетом следующих требований:
1) для ввода данных используются контакты реле первого класса, не занятые в других схемах;
2) ввод данных осуществляется через устройство гальванической развязки с обеспечением полнофункционального контроля цепей сбора и ввода данных;
3) при оценке состояния объекта осуществляется накопление и обработка данных, обеспечивающие их требуемую достоверность при воздействии электромагнитных помех и «дребезга» контактов;
4) время обработки сигнала с момента изменения состояния контактов до формирования информации о состоянии объекта не превышает 0,5 с.
Программное обеспечение УВК, КСД, АРМ ШН и АРМ ДСП работает в операционных системах Widows XP service pack 2 и InTime 2.22 3 и основано на использовании объектно-ориентированных подходов построения. Программное обеспечение выполнено на исходном языке C++.
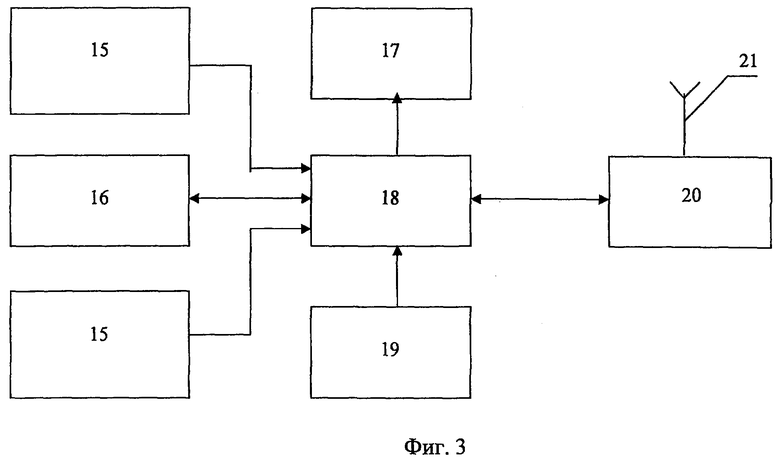
БА МАЛС (фиг.3) состоит из контроллера бортового 18 (БК) со встроенным программным обеспечением (ПО), предназначенного для реализации всех функциональных возможностей бортовой аппаратуры, блока индикации 17 (БИ), предназначенного для отображения рабочего экрана машиниста и вывода визуальной информации при работе БА МАЛС, блока управления 19 (БУ), предназначенного для ввода информации машинистом с клавиатуры, блока переключателей 16 (БП), предназначенного для подключения БА МАЛС к электрооборудованию локомотива, датчиков импульсов 15 (ДИ), предназначенных для преобразования угла поворота колеса в две последовательности импульсов постоянного тока, радиостанции 20, производящей обмен информацией с процессорным модулем БК и обмен информацией по цифровому радиоканалу с радиостанцией, входящей в состав СУ МАЛС, антенна 21.
ПО БА МАЛС работает в режиме реального времени. Программа осуществляет постоянный мониторинг состояния движения локомотива, состояния электрооборудования локомотива, данных радиоканала и вывод на монитор оперативной информации. В критических ситуациях программа воздействует на управление силовой установкой локомотива и производит экстренное его торможение.
СО МАЛС 3 имеет двухуровневую архитектуру. Верхний уровень представляет собой реализующий все функциональные возможности СО МАЛС 3 при проведении диагностики бортовой и станционной аппаратуры МАЛС промышленный компьютер (системный блок 26 и монитор, клавиатура, мышь, принтер, обозначенные позицией 27) с подключенной радиостанцией 30, источником питания 25 и антенной 31. На нижнем уровне располагаются: пульт контроля 28 (ПК БА МАЛС) с источником питания БП-110М 29, предназначенный для проверки бортовой аппаратуры МАЛС; пульт контроля 24 (ПК КО), осуществляющий проверку станционной аппаратуры МАЛС; адаптер 12КО 22, предназначенный для приема от КСД информации о текущем состоянии объектов контроля и передачи принятой информации на верхний уровень для дальнейшей обработки; контроллер опроса 23 (КО). Контроллер сбора данных КСД предназначен для сбора информации с объектов контроля.
Промышленный компьютер предназначен для реализации всех функциональных возможностей СО МАЛС 3 при проведении диагностики бортовой и станционной аппаратуры МАЛС.
Радиостанция предназначена для обмена информацией по радиоканалу с радиостанцией, входящей в состав СУ МАЛС 1, и радиостанцией, входящей в состав БА МАЛС 2.
Программное обеспечение СО МАЛС 3 работает в операционной системе Windows 2000 и основано на использовании объектно-ориентированных подходов построения, что позволяет сделать систему гибкой, управляемой и способной органично адаптироваться к эксплуатационным требованиям. Программное обеспечение выполнено на исходном языке C++.
ПО СО МАЛС предназначено для проверки цифрового радиоканала подсистем СУ МАЛС1 и БА МАЛС 2, а также сбора данных с нижнего уровня, их анализа и обработки.
В системе используются следующие основные средства связи: цифровой радиоканал; локальная вычислительная сеть ЛВС на базе 10-Мбитной технологии Ethernet; физические линии.
Совокупность способов и средств связи обеспечивает как горизонтальный, так и вертикальный обмен информацией между отдельными компонентами системы.
Горизонтальный обмен обеспечивает передачу информации между компонентами одного уровня, а вертикальный обмен - между компонентами разных уровней.
Подсистемы СУ МАЛС 1 и БА МАЛС 2 в условиях эксплуатации связаны между собой только по цифровому радиоканалу связи.
Подсистема СО МАЛС 3 связана с подсистемами СУ МАЛС 1 и БА МАЛС 2 по цифровому радиоканалу, а также имеет возможность кабельного соединения при проведении работ по проверке работоспособности составных частей системы.
Частотный диапазон радиостанций цифрового радиоканала должен быть 150 МГц или 460 МГц в зависимости от региона поставки системы.
Контроль передаваемой информации по цифровому радиоканалу между подсистемами СУ МАЛС 1, БА МАЛС 2 и СО МАЛС 3 осуществляется по протоколу CRC32.
Внешние интерфейсы подсистемы СУ МАЛС 1:
1) информационный обмен между радиостанцией и УВК 8 производится по интерфейсу RS-232/RS-422;
2) информационный обмен между комплектами УВК 8 и между УВК 8 - АРМ ШН 12 производится по локальной сети "Ethernet";
3) информационный обмен между УВК 8, АРМ ШН 12 и КСД 4 производится по локальной сети "Ethernet";
4) релейные цепи, подключаемые к КСД 4, должны быть гальванически развязаны;
5) для взаимодействия с другими станционными и локомотивными системами должны быть предусмотрены аппаратные и программные средства, обеспечивающие требуемую достоверность передачи данных.
Внешние интерфейсы подсистемы БА МАЛС 2:
1) информационный обмен между бортовым контроллером 18 (БК) и радиостанцией производится по интерфейсу RS-232;
2) все сигналы, поступающие с локомотива и датчиков импульсов, должны быть гальванически развязаны.
Внешние интерфейсы подсистемы СО МАЛС 3:
1) информационный обмен между радиостанцией и системным блоком СО МАЛС производится по интерфейсу RS-232/ RS-422;
2) информационный обмен между системным блоком СО МАЛС и адаптером 22 производится по интерфейсу RS-422/485;
3) информационный обмен между адаптером 22 и контроллером опроса 23 производится по интерфейсу ИРПС 20 мА;
4) пульт ПК КО 24 при проверке КО 23 или адаптера 22 имитирует выдачу сигналов реле ЭЦ 5;
5) пульт ПК БА МАЛС 28 при проверке БА МАЛС 2 имитирует сигналы электрооборудования локомотива.
6) при проверке измерителя скорости системный блок СО МАЛС 3 связан с БК 18, входящим в состав БА МАЛС 2, по интерфейсу RS-485.
Технология системы МАЛС предусматривает три режима работы: ручной, автономный и телеуправление.
Ручной - работа системы в режиме отображения информации без информационного обмена по цифровому радиоканалу.
Подсистема СУ МАЛС 1 в ручном режиме обеспечивает:
1) прием от устройств ЭЦ 5 (или других систем) информации о состоянии рельсовых цепей, светофоров и положении стрелок;
2) отображение на мониторе УВК 8 путевого развития станции и прилегающих перегонов (пути, изолированные участки, стрелки, светофоры и т.д.);
3) отображение состояния объектов контроля (состояние рельсовых цепей, положение стрелок, показания светофоров, заданные маршруты по станции и т.д.);
4) регистрацию смен ДСП в журнале системы МАЛС;
5) запись в журнале системы МАЛС событий, происшедших на станции (за исключением событий, связанных с БА МАЛС);
Подсистема БА МАЛС 2 в ручном режиме обеспечивает:
1) контроль положения контроллера локомотива;
2) контроль скатывания локомотива;
3) измерение фактической скорости и направления движения локомотива;
4) отображение рабочего экрана машиниста на блоке индикации БА МАЛС;
5) срыв ЭПК при неисправностях аппаратуры БА МАЛС или ее выключении.
Автономный - работа системы в режиме информационного обмена между СУ МАЛС и БА МАЛС по цифровому радиоканалу без задания маршрутов.
Подсистема СУ МАЛС 1 в автономном режиме обеспечивает:
1) выполнение функций ручного режима работы;
2) отображение на мониторе УВК 8 местоположений локомотивов на плане станции, значений их фактических скоростей движения и наличия связи с ними по радиоканалу;
3) посылку команды по цифровому радиоканалу на локомотив на срыв ЭПК по приказу ДСП;
Подсистема БА МАЛС 2 в автономном режиме обеспечивает:
1) выполнение функций ручного режима работы;
2) срыв ЭПК по приказу станционных устройств или ДСП.
Телеуправление - работа системы с реализацией всех заложенных функций.
Исходной информацией для подсистемы СУ МАЛС 1 являются:
1) данные о состоянии ЭЦ 5 станции (путевые, стрелочно-путевые, сигнальные, замыкающие реле и реле контроля положения стрелок), считываемые КСД 4;
2) данные по длинам каждого элемента путевого развития станции и допустимым скоростям движения на них (длина приемо-отправочных путей, стрелочных участков пути измеряется между изолирующими стыками, ограничивающими пути с обеих сторон);
3) наличие мест производства работ и временных ограничений скорости движения на каждом участке станции, устанавливаемых ДСП;
4) местоположение локомотивов на плане станции;
5) функциональное состояние локомотивов, оборудованных аппаратурой МАЛС (передается каждым локомотивом по цифровому радиоканалу связи).
Исходной информацией для подсистемы БА МАЛС 2 являются:
1) тип локомотива (тепловозы типа ТЭМ 2 и ЧМЭ 3);
2) тип аппаратуры;
3) номер локомотива;
4) диаметры колес локомотива (вводятся после каждой обточки колесных пар работниками, ответственными за обслуживание БА МАЛС);
5) состояние электрооборудования локомотива (положение контроллера, реверсора и т.д.);
6) число импульсов на один оборот колеса (фактическая скорость движения);
7) маршрутное задание (эта информация передается станционной аппаратурой по цифровому каналу радиосвязи).
Исходной информацией для подсистемы СО МАЛС 3 являются данные о техническом состоянии составных частей подсистем СУ МАЛС 1 и БА МАЛС 2.
Графический интерфейс пользователя (ГИП) подсистемы СУ МАЛС 1.
После включения УВК 8 и загрузки ПО УВК СУ МАЛС на экране монитора появляется основное окно с изображением однониточного плана станции и отображением состояния объектов контроля системы (ЭЦ 5, локомотивы).
Пользователь (дежурный по станции) при работе с ГИП СУ МАЛС имеет возможность: осуществлять регистрацию заступления на дежурство смен ДСП; контролировать (по отображению на мониторе) заданные с помощью устройств ЭЦ 5 маневровые и поездные маршруты, состояние свободности или занятости путей, стрелочных секций, показания сигналов светофоров, положение стрелок; производить ввод (позиционирование) и вывод из МАЛС локомотивов, оборудованных БА МАЛС 2; контролировать поддержку радиосвязи с локомотивами, оборудованными БА МАЛС 2; передавать команды назначения и отмены исполнения маршрутов локомотивам, оборудованным БА МАЛС 2, введенным в МАЛС на данной станции; отслеживать передвижение локомотивов (дрезин, поездов); формировать и отменять команды временного ограничения скорости движения локомотивов при проследовании мест проведения работ; осуществлять просмотр электронного журнала регистрации событий, происшедших в результате проведения маневровых работ на станции.
Графический интерфейс пользователя подсистемы БА МАЛС 2.
После включения БА МАЛС и загрузки ПО БА МАЛС на экране монитора появляется основное окно с изображением рабочего экрана машиниста.
На рабочем экране отображается следующая информация для машиниста: зона перемещения локомотива в обоих направлениях; допустимые скорости движения в обоих направлениях; фактическая скорость движения; режим работы БА МАЛС; позиция контроллера локомотива; исправность и функционирование аппаратуры МАЛС; комментарии.
На рабочем экране машиниста можно выделить следующие информационные поля:
- скорость фактическая - скорость, измеряемая датчиками импульсов 15, установленными на 2-й и 5-й осях локомотива;
- скорость допустимая - максимально разрешенная скорость движения локомотива, определяемая из характера маршрута, местоположения подвижной единицы на маршруте и положения локомотива. Значение допустимой скорости определяется правилами технической эксплуатации железных дорог и технически - распорядительных актов станции и временными ограничениями (при движении вперед и при движении назад);
- индикаторы направления движения локомотива указывают на текущее направление движения локомотива (при движении вперед и при движении назад);
- длина маршрута до точки остановки (при движении вперед и при движении назад);
- количество свободных блок-участков (при движении вперед и при движении назад);
- заданная скорость - устанавливается в режиме телеуправления по командам с поста, в режиме «МЕСТНОЕ ЗАДАНИЕ» устанавливается машинистом в диапазоне допустимых скоростей;
- позиции контроллера машиниста КМ (при движении и при торможении);
- название сигнала, до которого разрешено движение локомотива (при движении вперед и при движении назад);
- режим работы локомотива: «Р» - ручной; «А» - авторежим.
Графический интерфейс пользователя подсистемы СО МАЛС.
После включения промышленного компьютера на экране монитора появляется основное окно с изображением рабочего стола Windows. Для проверки цифрового радиоканала связи пользователь СО МАЛС должен с рабочего стола Windows запустить программу "МАЛСРАДИО". При этом на экране монитора должно открыться окно "Проверка радиоканала МАЛС".
Для проверки цифрового радиоканала БА МАЛС пользователь СО МАЛС должен выбрать надпись "Проверка Борта".
Для проверки цифрового радиоканала СУ МАЛС пользователь СО МАЛС должен выбрать надпись "Проверка Поста".
Для проверки измерителя скорости пользователь СО МАЛС должен с рабочего стола Windows запустить программу "МАЛСКДИ".
Для проверки КСД и адаптера 12 КО пользователь СО МАЛС должен с рабочего стола Windows запустить программу "МАЛСКО".
Работа системы
СУ МАЛС 1 посылает по цифровому радиоканалу связи в эфир приглашение на вход в систему, указывая в нем свое название и тип системы, в которой работает станция. После получения приглашения локомотив, оборудованный БА МАЛС 2, запрашивается в систему, передавая в телеграмме свой тип (локомотива), номер и фактическую скорость движения, направление движения, местоположение в составе.
Информация о местоположении локомотива в составе вводится машинистом локомотива при помощи функциональной клавиатуры БУ 19. После выполнения этой операции локомотив автоматически становится объектом системы. На мониторе УВК 8 (СУ МАЛС) появляется информация о номере локомотива и его фактической скорости. После установления связи с локомотивом и занятия им первой изолированной секции СУ МАЛС 1 определяет его ориентацию на станции, т.е. положение его «головы» по отношению к горловинам станции.
СУ МАЛС 1, непрерывно получая информацию от ЭЦ 5 станции, контролирует появление маневровых и поездных маршрутов типа: «до сигнала», «за сигнал», «на занятый путь», «за пределы станции». Маршруты «в тупик» выполняются как маршруты «на занятый путь».
Для передачи по цифровому радиоканалу маршрутного задания на локомотив дежурный по станции производит назначение маршрута локомотиву - объекту системы, который находится перед открытым сигналом маршрута. Значения допустимых скоростей, передаваемых в маршрутном задании, корректируются системой с учетом расположения локомотива в составе (резервом, в «голове», в «хвосте»), а при выполнении маршрутного задания всегда учитывается местоположение локомотива на изолированных секциях, т.к. допустимая скорость на изолированных секциях может быть разной. Например, «голова» состава может занимать изолированную секцию со значением допустимой скорости 60 км/ч, а «хвост» может находиться на изолированной секции со значением допустимой скорости 25 км/ч. В этом случае на локомотивном мониторе БИ 17 будет показана допустимая скорость движения - 25 км/ч.
Маршрутное задание принимается радиостанцией из состава БА МАЛС 2, передается в БК 18 и отображается на мониторе блока БИ 17, а СУ МАЛС 1 получает подтверждение приема переданной телеграммы и устанавливает признак назначения маршрута локомотиву.
После получения маршрутного задания локомотив может приступить к его выполнению. Маршрутное задание выполняется под непрерывным автоматическим контролем СУ МАЛС 1. В ответ на каждую телеграмму от СУ МАЛС 1 локомотив отвечает квитанцией. При временной потере связи в последующих телеграммах передается вся непереданная информация с учетом происшедших событий.
Во время выполнения каждого маршрутного задания БА МАЛС 2 производит вычисление длины состава. Вычисленная длина состава передается по радиоканалу на СУ МАЛС 1.
Удлинение, продление или укорочение маршрута корректируется системой автоматически и передаются на локомотив. При приближении локомотива к закрытому сигналу БА МАЛС 2 снижает допустимую скорость, согласно кривой торможения, заставляя локомотив перейти к торможению. СУ МАЛС 1 контролирует снижение локомотивом фактической скорости, являясь дополнительным средством контроля непроезда закрытого сигнала. При отсутствии торможения локомотиву по радиоканалу передается команда на экстренную остановку.
При выполнении маршрутного задания система непрерывно отслеживает и выдает на экран УВК 8 (СУ МАЛС) местоположение локомотива на плане станции. Эта функция системы не позволяет назначать локомотиву «чужие» маршруты. Если по каким-либо причинам локомотив не получил информацию от СУ МАЛС 1, то в следующей телеграмме СУ МАЛС 1 передают новую телеграмму с учетом новых событий. Если локомотив в течение нескольких сеансов связи не получает телеграммы от СУ МАЛС 1, то происходит его остановка перед первым сигналом в маршруте или перед первой стрелкой. После остановки локомотива, если связь не восстановилась, машинист должен продолжать работу в штатном режиме.
Место производства работ устанавливает дежурный по станции на любом элементе путевого развития станции с помощью «мыши» или клавиатуры. Все задаваемые маршруты через отмеченные места производства работ будут передаваться на локомотивы с их описанием.
При отсутствии маршрутного задания в режиме «Телеуправление» локомотив имеет возможность передвигаться только в пределах последней изолированной секции последнего выполненного маршрута. При попытке проезда одного из стыков изолированной секции происходит срыв ЭПК.
При нулевом положении контроллера бортовые устройства МАЛС контролируют отсутствие скатывания локомотива. При движении локомотива наличие двух датчиков импульсов позволяет правильно определять значение фактической скорости при юзе и боксовании, а также при разгоне и торможении.
В управляющем вычислительном комплексе УВК 8 ведется журнал о событиях. Все события, происходящие на станции, действия дежурного по станции и локомотивной бригады, а также функциональное состояние локомотивов фиксируются в журнале. Кроме функционального состояния локомотивной аппаратуры, в этом журнале записывается информация о причинах срыва ЭПК, включении проверки бдительности и т.д. Информация в журналах хранится в течение одной недели.
Система МАЛС может взаимодействовать со следующими системами:
1) Релейно- и микропроцессорные централизации (РПЦ и МПЦ);
2) Системы диспетчерского контроля (ДК), диспетчерской централизации (ДЦ);
3) Автоматизированная система ведения базы данных техническо-распорядительных актов (AC TPA);
4) Локомотивные устройства КЛУБ, ЕКС и др.;
5) Другие стационарные и бортовые системы и устройства.
Для организации взаимодействия с системами используются следующие основные средства связи:
1) физические линии (RS-232, RS-422/485, ИРПС и т.д.);
2) локальная вычислительная сеть ЛВС на базе 10/100-Мбитной технологии Ethernet;
3) цифровой радиоканал.
Совокупность способов и средств связи обеспечивает как горизонтальный, так и вертикальный обмен информацией между отдельными компонентами взаимодействующих систем.
Горизонтальный обмен обеспечивает передачу информации между компонентами систем, расположенными на одном иерархическом уровне, а вертикальный обмен - между компонентами разных уровней.
Система МАЛС на сегодняшний день является безальтернативным средством обеспечения безопасности движения при маневровых работах и при перевозке опасных грузов, с высокой надежностью исключающим превышение скорости, проезд запрещающих сигналов, взрез стрелок. МАЛС автоматически контролирует соблюдение скоростного режима, расстояния до места проведения работ на станции или мест с ограничением скорости движения. Применение этой системы позволяет исключить столкновения вагонов и локомотивов на станциях и предотвратить возникновение аварий, имеющих место на ряде железных дорог из-за ошибок обслуживающего персонала. Цифровой радиоканал связи системы МАЛС совместно с производительной ЭВМ обеспечивает оперативность управления локомотивами и слежения за их местонахождением, не достижимую другими средствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| Станционное устройство системы маневровой автоматической локомотивной сигнализации, интегрированной с микропроцессорной централизацией железнодорожной станции | 2022 |
|
RU2780257C1 |
| СТАНЦИОННОЕ УСТРОЙСТВО МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2011 |
|
RU2478508C1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2011 |
|
RU2478509C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| УПРАВЛЯЮЩИЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2419123C1 |
| Система управления маневровыми локомотивами | 2016 |
|
RU2622524C1 |
| БОРТОВАЯ АППАРАТУРА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2411152C1 |
| Способ управления поездами при их последовательном отправлении со станции | 2021 |
|
RU2757131C1 |


Изобретение относится к автоматике и телемеханике на железнодорожном транспорте. Система состоит из бортовой аппаратуры, станционного устройства и сервисного оборудования, предназначенного для проверки работоспособности, диагностики и выявления дефектов в бортовой аппаратуре и станционном устройстве. Станционное устройство включает управляющий вычислительный комплекс, который обеспечивает контроль поездной ситуации на основе данных, получаемых от устройств электрической централизации посредством контроллера сбора данных, обеспечивает взаимодействие с бортовой аппаратурой и сервисным оборудованием по цифровому радиоканалу, обеспечивает контроль поддержки радиосвязи с локомотивами и осуществляет контроль передвижения подвижных единиц. Бортовая аппаратура включает бортовой контроллер, блок индикации, блок управления, блок переключателей, датчики импульсов и радиостанцию, принимающую информацию на процессорный модуль бортового контроллера и осуществляющую обмен информацией с радиостанцией, входящей в состав станционного устройства, и радиостанцией, входящей в состав сервисного оборудования, имеющего двухуровневую архитектуру. Изобретение направлено на повышение степени автоматизации и производительности маневровой работы на железнодорожных станциях. 8 з.п. ф-лы, 4 ил.
1. Система маневровой автоматической локомотивной сигнализации, состоящая из бортовой аппаратуры, станционного устройства и сервисного оборудования, предназначенного для проверки работоспособности, диагностики и выявления дефектов в бортовой аппаратуре и станционном устройстве, характеризующаяся тем, что станционное устройство включает управляющий вычислительный комплекс, который обеспечивает контроль поездной ситуации на основе данных, получаемых от устройств электрической централизации посредством контроллера сбора данных, обеспечивает взаимодействие с бортовой аппаратурой и сервисным оборудованием по цифровому радиоканалу, обеспечивает контроль поддержки радиосвязи с локомотивами и осуществляет контроль передвижения подвижных единиц, кроме этого, станционное устройство включает контроллер сбора данных, обеспечивающий сбор данных о состоянии объектов контроля путем циклического опроса, и передачи этой информации на сервисное оборудование, при этом бортовая аппаратура включает бортовой контроллер, предназначенный для реализации всех функциональных возможностей бортовой аппаратуры, блок индикации, блок управления, блок переключателей, датчики импульсов и радиостанцию, принимающую информацию на процессорный модуль бортового контроллера и осуществляющую обмен информацией с радиостанцией, входящей в состав станционного устройства и радиостанцией, входящей в состав сервисного оборудования, имеющего двухуровневую архитектуру, на верхнем из которых реализуются все функциональные возможности при проведении диагностики бортовой и станционной аппаратуры, а на нижнем располагаются пульт контроля бортовой аппаратуры и пульт контроля станционного устройства.
2. Система по п.1, характеризующаяся тем, что верхний уровень сервисного оборудования представляет собой промышленный компьютер с подключенной радиостанцией, на котором осуществляют проверку радиоканала связи.
3. Система по п.2, характеризующаяся тем, что на нижнем уровне сервисного оборудования располагается пульт контроля бортовой аппаратуры, осуществляющий проверку бортового контроллера и измерителя скорости бортовой аппаратуры и пульт контроля контроллера сбора данных и адаптера, осуществляющий проверку устройств из состава станционной аппаратуры.
4. Система по любому из пп.1-3, характеризующаяся тем, что сервисное оборудование работает в режиме многократного циклического применения.
5. Система по п.4, характеризующаяся тем, что бортовая аппаратура осуществляет постоянный мониторинг состояния движения локомотива, состояния электрооборудования локомотива, данных радиоканала и вывод на монитор оперативной информации, при этом информация о состоянии электрооборудования локомотива поступает через блок переключателей, а информация о фактической скорости движения поступает от датчиков импульса.
6. Система по п.5, характеризующаяся тем, что управляющий вычислительный комплекс взаимодействует с другими станционными и локомотивными системами и системой спутниковой навигации.
7. Система по п.6, характеризующаяся тем, что стационарное устройство и бортовая аппаратура в условиях эксплуатации связаны между собой по цифровому радиоканалу связи.
8. Система по п.7, характеризующаяся тем, что сервисное оборудование связано с станционным устройством и бортовой аппаратурой по цифровому радиоканалу, а также имеет возможность кабельного соединения при проведении работ по проверке работоспособности составных частей системы.
9. Система по п.8, характеризующаяся тем, что частотный диапазон радиостанций цифрового радиоканала составляет 150 МГц или 460 МГц.
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| УСТРОЙСТВО ДЛЯ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 1998 |
|
RU2159716C2 |
| ЦЕНТРАЛИЗОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА С РАСПРЕДЕЛЕННЫМИ КОНТРОЛИРУЕМЫМИ ПУНКТАМИ | 2003 |
|
RU2240245C1 |
| АВТОМАТИЧЕСКАЯ ИНФОРМАЦИОННАЯ СИСТЕМА "СИГНАЛ" | 1992 |
|
RU2089429C1 |
| Устройство для разлива жидкости во фляги | 1989 |
|
SU1723021A1 |

