Изобретение относится к электроприводу погружных насосов нефтедобычи.
Известна электронасосная погружная установка (Патент РФ №2137945, опубл. 20.09.99), включающая преобразователь частоты, состоящий из размещенного на земле выпрямителя с системой управления и инвертора с системой управления, питающего электродвигатель погружного насоса.
Насос, двигатель и инвертор размещены в скважине. Один из силовых выводов инвертора связан с соответствующим силовым выводом выпрямителя при помощи жилы одножильного кабеля.
Установка снабжена датчиком положения ротора двигателя, соединенным с инвертором и системой управления преобразователя частоты. Выпрямитель и инвертор выполнены с программным управлением. Вход программного устройства инвертора соединен с входом инвертора, а выход - с третьим входом системы управления инвертора. При этом программное устройство выпрямителя задает угол задержки более 90° эл. при пуске. По отношению к предлагаемому изобретению данная установка является наиболее близким аналогом и принимается в качестве прототипа.
Недостатком данной установки является размещение инвертора в скважине в непосредственной близости от двигателя и насоса, что усложняет технологические схемы ее пуска и снижает надежность работы установки.
В основу изобретения положена задача разработать конструкцию электронасосной погружной установки, позволяющую реализовать широкий и повышенный диапазон частотного регулирования, существенно снизить массогабаритные характеристики погружной части установки, упростить технологию пуска установки, повысить надежность ее работы.
Задача решается тем, что электронасосная погружная установка, включающая преобразователь частоты с выпрямителем, соединенным с ним инвертором и системой управления, соединенной с инвертором, погружаемый в скважину с обсадной колонной электродвигатель с погружным насосом на выходе, датчик положения ротора электродвигателя, соединенный с инвертором и системой управления, систему программного управления, соединенную с системой управления, согласно изобретению снабжена повышающим трансформатором, установленным на выходе инвертора, при этом система управления выполнена в виде блока микропроцессора преобразователя частоты и соединенных с ним блока связи преобразователя частоты и блока формирования позиционных сигналов, соединенного с датчиком положения ротора электродвигателя и с выходом повышающего трансформатора, система программного управления выполнена в виде контроллера управления с блоком микропроцессора и соединенными с ним блоком связи, блоком данных и блоком измерения токов, соединенным с датчиком положения ротора электродвигателя, блок связи преобразователя частоты соединен с блоком связи контроллера управления, а датчик положения ротора электродвигателя выполнен в виде блока датчиков тока и установлен на выходе повышающего трансформатора.
Отличительной особенностью установки является снабжение ее повышающим высокочастотным трансформатором, установленным на выходе инвертора (включенным в силовую часть установки) с целью повышения напряжения до уровня, требуемого электродвигателю, а при наличии входного фильтра - для защиты электронных узлов станции от скачков напряжения в сети и снижения нежелательного влияния установки на сеть.
Особенностью установки также является выполнение датчика положения ротора электродвигателя в виде блока датчиков тока, т.к. в случае погружных электродвигателей нет возможности реализовать конструктивно выраженный датчик положения ротора, поскольку необходимо было бы связывать датчик, расположенный на валу электродвигателя с преобразователем частоты, расположенным в системе управления на поверхности земли. В заявленной схеме (в отличие от прототипа) функция контроля положения ротора относительно статора реализуется за счет математической обработки параметров управления электромеханическим преобразователем (ток, напряжение, частота вращения), контролируемых на выходе системы управления.
Отличием установки является соединение блока формирования позиционных сигналов с датчиком положения ротора электродвигателя и с выходом повышающего трансформатора для получения на выходе сигнала во временной зависимости от положения ротора электродвигателя и его тока, т.е. на основе измерения мгновенных (текущих) значений тока и напряжения определить положение ротора двигателя.
Особенностью является установка блока датчиков тока на выходе повышающего трансформатора для повышения точности измерения, т.к. значения из блока данных напрямую соответствуют току электродвигателя погружного насоса.
На чертеже дана блок-схема электронасосной погружной установки.
Схема включает контроллер 1 управления, содержащий блок 2 микропроцессора контроллера управления, соединенный с блоком 3 связи контроллера управления, с блоком 4 данных и блоком 5 измерения токов.
Блок 3 связи контроллера управления соединен с блоком 6 связи преобразователя 7 частоты, содержащего блок 8 микропроцессора преобразователя 7 частоты, соединенного с блоком 6 связи преобразователя 7 частоты, регулятором 10 напряжения, инвертором 11 и блоком 12 формирования позиционных сигналов.
Питание инвертором 11 электродвигателя 13 с погружным насосом на выходе осуществляют через повышающий (высокочастотный) трансформатор 14, на выходе которого установлен датчик положения ротора электродвигателя, выполненный в виде блока 15 датчиков тока.
Блок 15 датчиков тока соединен с блоком 5 измерения токов контроллера 1 управления и блоком 12 формирования позиционных сигналов, который соединен с выходом повышающего трансформатора 14. Блок 5 измерения токов преобразует аналоговый сигнал с блока 15 датчиков тока в цифровой.
Выпрямитель 9, регулятор 10 напряжения и инвертор 11 образуют силовую часть преобразователя 7 частоты.
Блок 8 микропроцессора преобразователя 7 частоты с блоком 6 связи преобразователя 7 частоты и блок 12 формирования позиционных сигналов образуют управляющую часть преобразователя 7 частоты.
Электронасосная погружная установка на входе преобразователя 7 частоты может содержать входной фильтр 16.
Контроллер 1 управляет установкой посредством обработки входных данных (измеренных текущих параметров работы - тока и частоты вращения), вычисления требуемого режима работы с использованием базы данных с характеристиками установки и задания необходимого режима преобразователю 7 частоты.
Измеряют динамику изменения тока и частоту, а анализируют режим работы установки в поле (подача, дебит - напор, динамический уровень).
В основу регулирования положен тот факт, что для использования установки применительно к широкому спектру значений параметров скважины необходима реализация широкого диапазона частотного регулирования (1000-15000)об/мин.
Особенностью регулирования является изменение напряжения на инверторе.
Электронасосная погружная установка работает следующим образом.
Все действия производит контроллер 1 управления электронасосной погружной установки.
Оператор задает начальную частоту n нач. вращения электродвигателя 13. Контроллер 1 управления производит запуск установки, через блок 3 связи контроллера 1 управления (по интерфейсу RS-485) задает преобразователю 7 частоты напряжение Udc, контролируя текущую (n текущая) частоту вращения электродвигателя 13, получаемую также через блок 6 связи от преобразователя 7 частоты. Контроллер 1 управления плавно выводит установку на заданную частоту вращения. Частота вращения электродвигателя 13 (погружного насоса) определяется частотой напряжения на выходе преобразователя 7 частоты. А она, в свою очередь, задается сигналами коммутации, вырабатываемыми блоком 12 формирования коммутационных сигналов по напряжению, подаваемому на электродвигатель 13, и сигналу с блока 15 датчиков тока, пропорциональному току I дв электродвигателя 13.
В процессе работы сигнал с блока 15 датчиков тока поступает в блок 5 измерения токов контроллера 1 управления и далее текущее значение тока I дв электродвигателя поступает в блок 2 микропроцессора контроллера 1 управления. Блок 2 микропроцессора контроллера 1 управления получает от преобразователя 7 частоты через его блок 6 связи текущую частоту вращения (n текущая) и, анализируя базу данных блока 4 данных с характеристиками установки (токовые и расходно-напорные характеристики), вычисляет требуемую оптимальную частоту вращения погружного насоса, учитывая динамику изменения параметров работы установки. Затем блок 2 микропроцессора контроллера 1 управления изменяет заданное значение Udc так, чтобы текущая частота вращения погружного насоса (n текущая) стала равна требуемой и так далее.
Т.о. предложенные схемное и конструктивное решения позволяют использовать погружной насос с вентильным приводом, работа которого для данной установки определяется частотным режимом и током в обмотке статора электродвигателя. При этом не требуется дополнительных измерений.
В то же время, повышенный (по отношению к традиционно используемым асинхронным двигателям) частотный режим позволяет существенным образом повысить напор ступени погружного насоса и, соответственно, снизить массогабаритные характеристики установки.
Таким образом, заявляемая электронасосная погружная установка, позволяет находить оптимальный режим работы и подстраиваться к изменяющимся условиям эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНАЯ СТАНЦИЯ УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОНАСОСОМ | 2010 |
|
RU2430273C1 |
| Станция управления насосной установкой нефтедобывающей скважины (варианты) | 2017 |
|
RU2651651C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ ЭКСПЛУАТАЦИИ СКВАЖИНЫ ЭЛЕКТРОНАСОСОМ С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ | 2006 |
|
RU2322571C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ ЭКСПЛУАТАЦИИ СКВАЖИНЫ ЭЛЕКТРОНАСОСОМ С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ | 2006 |
|
RU2322611C1 |
| СПОСОБ ДОБЫЧИ НЕФТИ В МАЛОДЕБИТНЫХ СКВАЖИНАХ | 2005 |
|
RU2298645C2 |
| ВЫСОКООБОРОТНАЯ ПОГРУЖНАЯ УСТАНОВКА ДЛЯ ДОБЫЧИ НЕФТИ ИЗ СКВАЖИН С ВЫСОКИМ ГАЗОСОДЕРЖАНИЕМ | 2011 |
|
RU2480629C1 |
| ПОГРУЖНОЙ НАСОСНЫЙ АГРЕГАТ | 2010 |
|
RU2415303C1 |
| СПОСОБ ОЧИСТКИ НЕФТЕДОБЫВАЮЩИХ СКВАЖИН | 2005 |
|
RU2298641C2 |
| ЭЛЕКТРОНАСОСНАЯ ПОГРУЖНАЯ УСТАНОВКА | 1997 |
|
RU2137945C1 |
| МНОГОСТУПЕНЧАТЫЙ ВЫСОКООБОРОТНЫЙ ПОГРУЖНОЙ ЦЕНТРОБЕЖНЫЙ НАСОС | 2010 |
|
RU2442909C2 |
Изобретение может быть использовано при создании приводов погружных насосов нефтедобычи. Установка включает преобразователь частоты (ПЧ) с выпрямителем, соединенным с ним инвертором и системой управления (СУ), соединенной с инвертором, погружаемый в скважину электродвигатель с погружным насосом на выходе. Установка включает датчик положения ротора электродвигателя, выполненный в виде блока (Б) датчиков тока и соединенный с инвертором и СУ, систему программного управления, соединенную с СУ. На выходе инвертора установлен повышающий трансформатор, на выходе которого установлен Б датчиков тока. СУ выполнена в виде Б микропроцессора ПЧ и соединенных с ним Б связи ПЧ и Б формирования позиционных сигналов, соединенного с Б датчиков тока и с выходом повышающего трансформатора. Система программного управления выполнена в виде контроллера управления с Б микропроцессора и соединенными с ним Б связи, Б данных и Б измерения токов, соединенным с Б датчиков тока. Б связи ПЧ соединен с Б связи контроллера управления. Изобретение направлено на расширение диапазона частотного регулирования, снижение массогабаритных характеристик, упрощение пуска установки и повышение надежности работы. 1 ил.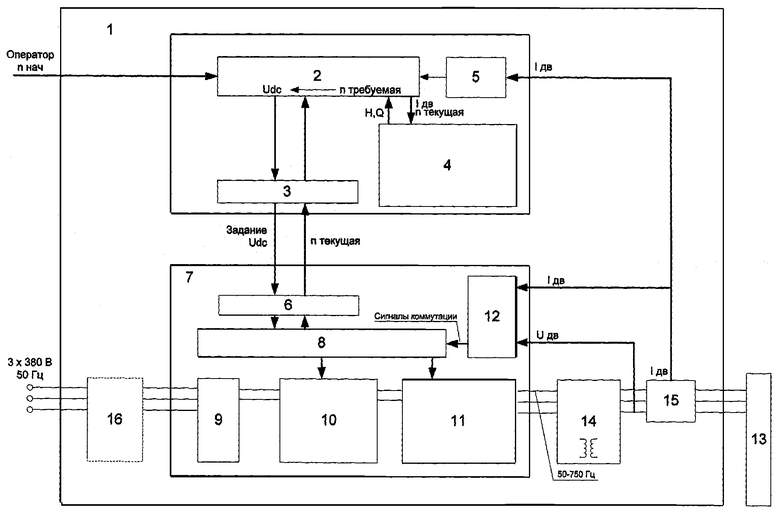
Электронасосная погружная установка, включающая преобразователь частоты с выпрямителем, соединенным с ним инвертором и системой управления, соединенной с инвертором, погружаемый в скважину с обсадной колонной электродвигатель с погружным насосом на выходе, датчик положения ротора электродвигателя, соединенный с инвертором и системой управления, систему программного управления, соединенную с системой управления, отличающаяся тем, что она снабжена повышающим трансформатором, установленным на выходе инвертора, при этом система управления выполнена в виде блока микропроцессора преобразователя частоты и соединенных с ним блока связи преобразователя частоты и блока формирования позиционных сигналов, соединенного с датчиком положения ротора электродвигателя и с выходом повышающего трансформатора, система программного управления выполнена в виде контроллера управления с блоком микропроцессора и соединенными с ним блоком связи, блоком данных и блоком измерения токов, соединенным с датчиком положения ротора электродвигателя, блок связи преобразователя частоты соединен с блоком связи контроллера управления, а датчик положения ротора электродвигателя выполнен в виде блока датчиков тока и установлен на выходе повышающего трансформатора.
| ЭЛЕКТРОНАСОСНАЯ ПОГРУЖНАЯ УСТАНОВКА | 1997 |
|
RU2137945C1 |
| RU 2001313 C1, 15.10.1993 | |||
| ЕР 0508124 A1, 14.10.1992 | |||
| US 3568771 А, 09.03.1971. | |||

