Изобретение относится к транспортным устройствам, а точнее к транспортным устройствам с дистанционным управлением, способным передвигаться по поверхностям различных объектов (сосудов, резервуаров, стенам сооружений и т.п.), используемых для выполнения работ по обследованию и контролю состояния металла, например ультразвуковой контроль, сварка, резка, зачистка поверхности и др., в промышленности, энергетике и атомной энергетике в частности.
При работе таких устройств необходимо дистанционно управлять их перемещением по поверхности, задавая необходимую траекторию движения, и определять координаты их нахождения в текущий момент времени.
Известны устройства с магнитными движителями (колесами), способные управляемо передвигаться по поверхности различных объектов, выполненной из ферромагнитного материала.
Известен способ и устройство сканирования поверхности и, соответственно, управления перемещением транспортного устройства, принятые за аналог, (а.с. №1632133), в котором траектория передвижения задается разматыванием гибкой связи (троса), намотанной на барабан, соединяющей барабан с транспортным устройством, а по длине размотанной с барабана связи определяются координаты транспортного устройства на поверхности.
К недостаткам аналога относится то, что с его помощью можно управлять только спиральной траекторией перемещения транспортного устройства и только в зоне прямой видимости (прямого направления) от барабана до места крепления троса на транспортном устройстве, что делает невозможном управлять транспортным устройством при его перемещении по наружной поверхности объектов с вертикальными стенками, например сосудов, и не обеспечивает возможности управления перемещением по наиболее часто востребованной траектории, состоящей из вертикальных и горизонтальных перемещений.
Целью изобретения является устранение указанных недостатков.
Эта цель достигается тем, что транспортный модуль снабжен лазерным дальномером, луч которого направлен всегда вертикально на отражатель, который имеет реперные отметки, расположенные на определенных расстояниях от начальной реперной отметки.
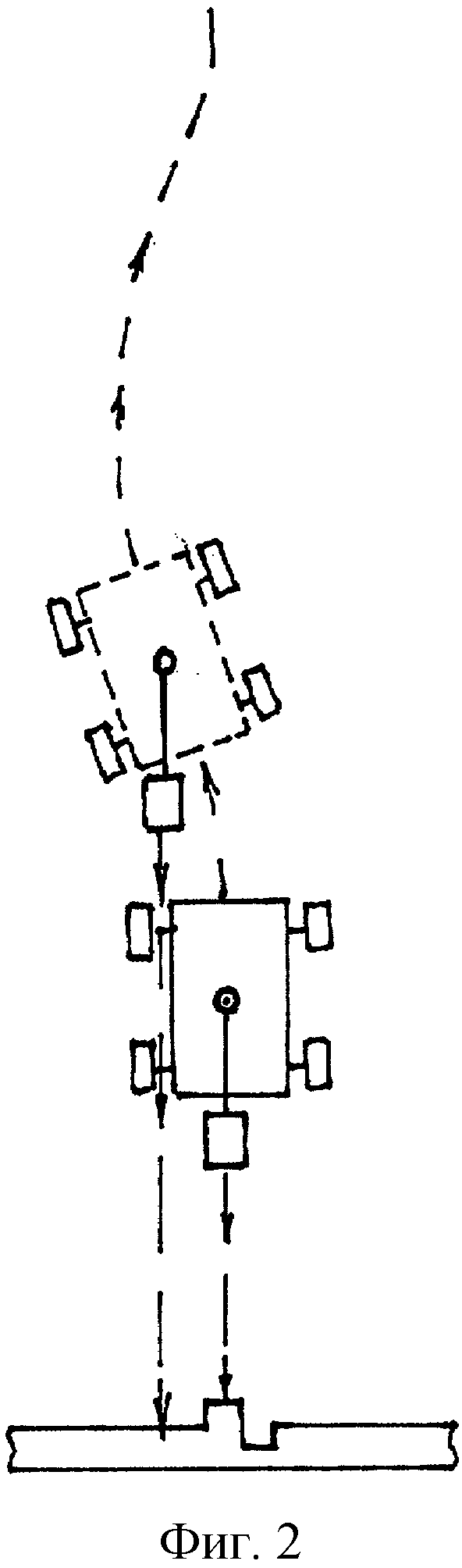
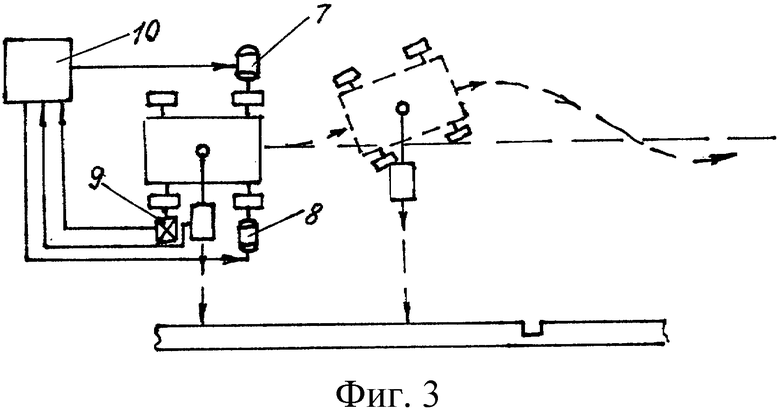
На фиг.1 изображено предлагаемое устройство (общий вид), на фиг.2 - траектория передвижения транспортного модуля и схема управления при движении модуля в вертикальном направлении, на фиг.3 - траектория движения модуля по горизонтали и блок управления.
Устройство состоит из транспортного модуля 1, укрепленного на нем при помощи шарнирной подвески 2 лазерного дальномера 3 и отражателя 4. Отражатель снабжен реперными отметками, фиксируемыми дальномером, например, в виде выступа 5 (начальный репер) и впадин 6 определенной высоты и глубины соответственно, расположенными на заданных расстояниях от начального репера.
Транспортный модуль приводится в движение с помощью ведущих магнитных колес с электроприводами 7 и 8 (фиг.3), расположенными по левому и правому бортам модуля соответственно. На одном из колес модуля укреплен счетчик пройденного пути (счетчик числа оборотов колеса) 9. Управление работой электроприводов ведущих колес осуществляет блок управления 10, на который поступает информация от счетчика пути 9 и дальномера 3.
Работает устройство (на примере обследования состояния корпуса ядерного энергетического реактора 11 на фиг.1) следующим образом: первоначально транспортный модуль 1 устанавливается на корпус реактора 11 в положение I (фиг.1). Лазерный дальномер 3 на шарнирной подвеске 2 занимает отвесное положение, и луч его направлен на поверхность начального репера 5. При включении питания электроприводов ведущих колес 7 и 8 от блока управления 10 оба колеса начинают вращаться с одинаковой скоростью, и транспортный модуль 1 начинает двигаться вертикально вверх по поверхности корпуса 11. В случае отклонения передвижения модуля от вертикали, например, влево, под воздействием внешних сил (натяжения кабеля, связывающего модуль с блоком управления), луч дальномера (см. фиг.2), оставаясь направленным вертикально, начнет отражаться не от репера 5, а от основной поверхности отражателя 4, т.е. расстояние от дальномера резко увеличится на высоту репера 5. При поступлении такой информации от дальномера на блок информации 10 последний изменит частоту вращения приводов ведущих колес 7 и 8 таким образом, что колесо, расположенное на левом борту, начнет вращаться быстрее, чем колесо на правом борту, и модуль начнет смещаться вправо, возвращаясь к заданной вертикали. Если же модуль начнет смещаться вправо от заданной вертикали, то дальномер зафиксирует изменение расстояния до отражающей поверхности на сумму высоты выступа 5 и глубины впадины 6, расположенной справа от выступа. Блок управления в этом случае заставит уже правое колесо вращаться быстрее левого, и модуль также возвратится к заданной вертикали. Когда модуль поднимется до заданной высотной отметки (положение II, фиг.1), которая определяется по показаниям дальномера, модуль останавливается, разворачивается на 90° и начинает двигаться по горизонтали.
Горизонтальность передвижения модуля определяется постоянством расстояния от модуля до отражателя, установленного горизонтально. Если же это расстояние по какой либо причине меняется (фиг.3), то на основании информации, полученной от дальномера, блок управления корректирует направление перемещения модуля, воздействуя на электроприводы ведущих колес, возвращая его на заданную высотную отметку таким же образом, как и при движении по вертикали.
Величина пройденного модулем расстояния от начальной реперной отметки определяется счетчиком пути 9. Из-за маневрировании модуля для сохранения горизонтальности передвижения измеренное счетчиком пути расстояние будет отличаться от длины прямой линии (длины дуги окружности при передвижении по цилиндру), соединяющей точку начала передвижения с точкой, в которой в данный момент модуль находится. Это отличие (погрешность измерения координаты положения модуля на горизонтали) будет постоянно увеличиваться по мере увеличения пройденного пути. Для уменьшения погрешности определения истинных координат положения модуля при движении по горизонтали служат реперные отметки 6, расположенные на известном, строго определенном расстоянии друг от друга и от начальной реперной отметки. Момент прихода модуля к реперу фиксируется дальномером. Эта информация передается на блок управления, на основании которой блок управления корректирует показания счетчика пути, устраняя накопленную погрешность его измерений.
Завершение полного оборота модуля вокруг корпуса 11 зафиксируется дальномером 3 по реперному выступу 5. Модуль останавливается, поворачивается на 90°, поднимается на новую высоту, вновь начинает двигаться по горизонтали и т.д.
Анализ известных технических решений позволяет сделать вывод о том, что заявляемое изобретение не следует из уровня исследуемой техники, что свидетельствует о его соответствию критерию «новизна».
Сущность заявляемого изобретения для специалистов не следует явным образом из уровня техники, что позволяет сделать вывод о его соответствии критерию «изобретательский уровень».
Возможность использования заявляемого изобретения в отечественной промышленности позволяет сделать вывод о его соответствии критерию «промышленная применимость».
Дальномер, укрепленный на транспортном модуле, и отражатель с реперными метками позволят управлять траекторией движения транспортного устройства при передвижении в горизонтальном и вертикальном направлениях по вертикальным стенкам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕЗАКТИВАЦИИ ОБОРУДОВАНИЯ ОТ ПОВЕРХНОСТНЫХ РАДИОАКТИВНЫХ ЗАГРЯЗНЕНИЙ | 2006 |
|
RU2329555C2 |
| СПОСОБ ДЕЗАКТИВАЦИИ ОБОРУДОВАНИЯ ОТ ПОВЕРХНОСТНЫХ РАДИОАКТИВНЫХ ЗАГРЯЗНЕНИЙ | 2006 |
|
RU2328785C1 |
| СПОСОБ ТОПОГРАФИЧЕСКОЙ СЪЕМКИ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2102706C1 |
| Способ определения параметров геометрии рельсовой колеи и система для его осуществления | 2018 |
|
RU2686341C1 |
| Способ контроля соосности клетей станов продольной прокатки | 2018 |
|
RU2692683C1 |
| УСТРОЙСТВО ДИАГНОСТИКИ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ И ЕГО КОМПОНЕНТ | 2014 |
|
RU2558002C1 |
| СПОСОБ ДЕЗАКТИВАЦИИ ТРУБ И ТРУБНЫХ ПУЧКОВ - КИСЛОТНО-АБРАЗИВНАЯ ДЕЗАКТИВАЦИЯ | 2011 |
|
RU2505872C2 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДОВ НАДЗЕМНОЙ ПРОКЛАДКИ В УСЛОВИЯХ ВЕЧНОЙ МЕРЗЛОТЫ | 2014 |
|
RU2582428C2 |
| Устройство для укладки расплетенных жил проводов, грозозащитных тросов или канатов | 2024 |
|
RU2835145C1 |
| Система и способ для определения пространственного положения и выправки железнодорожного пути, устройство лазерного измерения системы сбора данных о фактическом положении пути | 2023 |
|
RU2808852C1 |
Изобретение относится к транспортным устройствам с дистанционным управлением, способным передвигаться по поверхностям различных объектов (сосудов, резервуаров, стенам сооружений и т.п.) для выполнения различных работ, таких как контроль состояния металла, сварка, резка, зачистка поверхности и др. Транспортное устройство содержит транспортный модуль, способный передвигаться по вертикальным поверхностям, блок управления направлением передвижения транспортного модуля и лазерный дальномер. Последний укреплен на корпусе транспортного модуля с возможностью принятия положения с отвесным направлением луча. Ниже уровней перемещений транспортного модуля на всей длине его горизонтальных перемещений установлен отражатель с реперными отметками, фиксируемыми лазерным дальномером и расположенными на заданных расстояниях от начального репера по длине отражателя. Блок управления выполнен с возможностью воздействия на приводы ведущих колес транспортного модуля при поступлении сигналов от лазерного дальномера для обеспечения его вертикального подъема до заданной высотной отметки, разворота и горизонтального передвижения. Устройство характеризуется расширенными функциональными возможностями, позволяющими ему перемещаться по наиболее часто востребованным траекториям. 3 ил.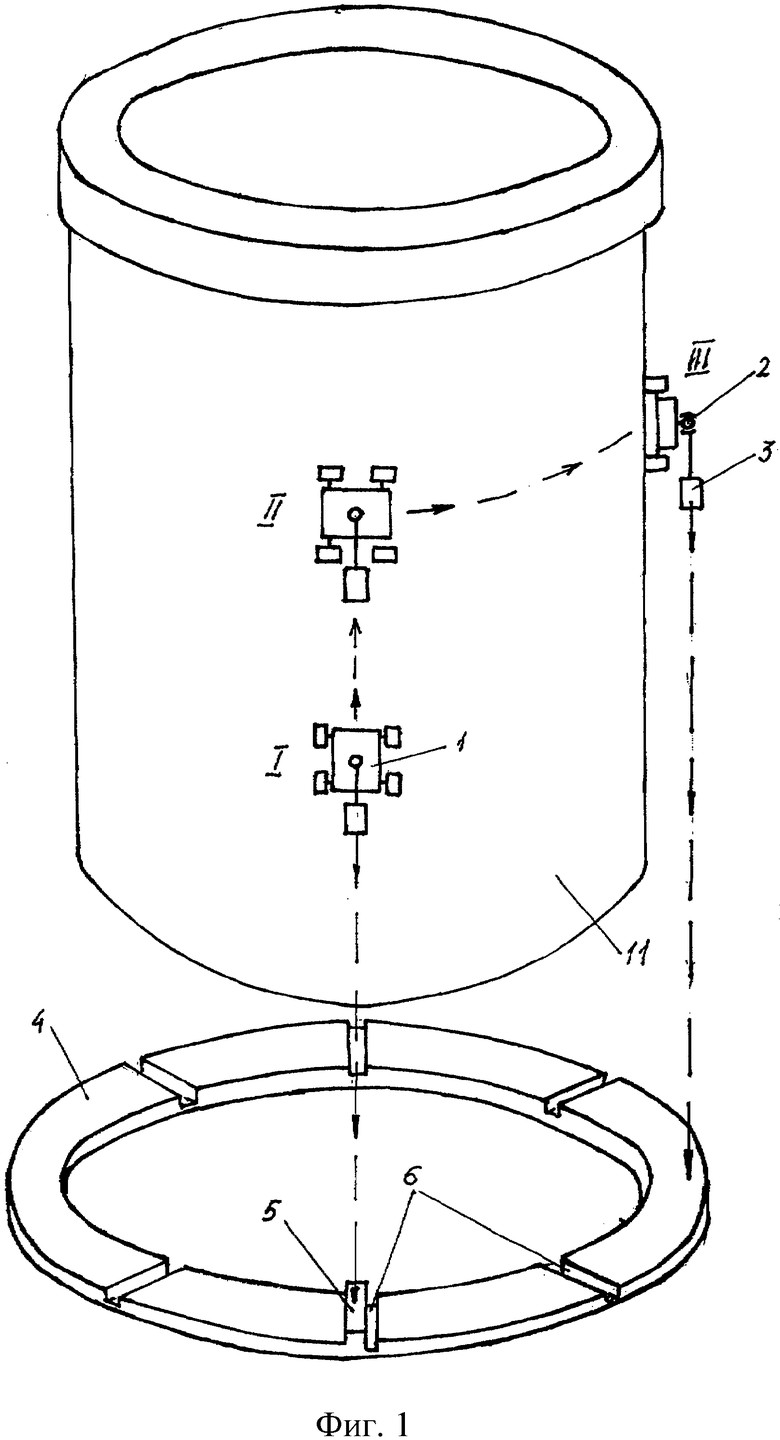
Транспортное устройство для управляемого перемещения по поверхности объектов с вертикальными стенками, содержащее транспортный модуль, способный передвигаться по вертикальным поверхностям, блок управления направлением передвижения транспортного модуля и лазерный дальномер, отличающееся тем, что лазерный дальномер укреплен на корпусе транспортного модуля с возможностью принятия положения с отвесным направлением луча, ниже уровней перемещений транспортного модуля на всей длине его горизонтальных перемещений установлен отражатель с реперными отметками, фиксируемыми лазерным дальномером и расположенными на заданных расстояниях от начального репера по длине отражателя, а упомянутый блок управления выполнен с возможностью воздействия на приводы ведущих колес транспортного модуля при поступлении сигналов от лазерного дальномера для обеспечения вертикального подъема транспортного модуля до заданной высотной отметки, разворота и горизонтального передвижения.
| JP 63222983 А, 16.09.1988 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ФЕРРОМАГНИТНЫМ ПОВЕРХНОСТЯМ | 1992 |
|
RU2051058C1 |
| US 5388528 А, 14.02.1995 | |||
| JP 10286694 А, 27.10.1998. | |||

