Техническое решение относится к системам для определения положения железнодорожных путей и осуществления путевых работ.
Из уровня техники известна система обработки данных, выполненная с возможностью получения натурных данных от системы лазерного сканирования автоматического распознавания из 3D-облака точек образа рельсов и объектов инфраструктуры с последующим построением геопространственной модели осей рельсов и объектов инфраструктуры, выполненная с возможностью загрузки и обработки натурных данных трехмерной модели и проектных решений, определения натурных параметров железнодорожного пути в плане, по уровню и в профиле, формирования программного задания для машины для подбивки стрелочных переводов, и система ее управления, выполненная с возможностью получения программного задания и его реализации с осуществлением контроля. Международная заявка на патент № 2018206214, МПК B61L23/04; B61L25/02, опубликована 15.112018.
Известна система осмотра и картографирования железнодорожного пути посредством получения геопривязанных геометрических данных рельса, данных 3D-облака точек с географической привязкой, которые включают в себя точечные данные, соответствующие двум рельсам и окружающей инфраструктуре; профилей пути на основании данных 3D-облака точек с географической привязкой и геометрии рельсов с географической привязкой; и сравнения профилей путей с последующим созданием расширенных геоссылочных геометрических данных рельсов и расширенных данных 3D-облака точек с географической привязкой. Международная заявка на патент WO2018208153, МПК B61L23/04; B61L25/02, опубликована 15.11.2018.
Задачей заявляемого технического решения является создание системы, связывающей работу систем определения положения путей и систем для их приведения в оптимальное проектное положение.
Технический результат заявляемого технического решения проявляется в повышении технологичности, безопасности и эффективности процессов, направленных на выправку железнодорожного пути, а также в достижении автоматизации процесса пооперационного контроля.
Технический результат достигается тем, что система для определения пространственного положения и выправки железнодорожного пути включает систему сбора геопространственных данных о существующем положении пути с помощью спутниковой навигации ГЛОНАСС или GPS с локально организованной постоянно действующей базовой сети и системой лазерного сканирования, систему обработки данных, выполненную с возможностью получения натурных данных существующего положения пути и прилегающей инфраструктуры от системы лазерного сканирования, автоматического распознавания из 3D-облака точек образа рельсов пути и объектов инфраструктуры с определением их координат с последующим построением геопространственной модели осей рельсов и объектов инфраструктуры в пространстве с определенными координатами, выполненную с возможностью обработки натурной и проектной трехмерной модели пути, определения натурных параметров пути в плане, по уровню и в профиле, определения перемещений пути для реализации проекта, и формирования программного задания для машин, участвующих в ремонте пути, для постановки пути в проектное положение с учетом проектных параметров и пространственного положения пути относительно объектов инфраструктуры, включая соседний путь, систему управления машиной для выправки пути, связанную с дополнительной системой сбора данных о фактическом положении пути, выполненную с возможностью реализации программного задания, на основе измерений полученных от дополнительной системы сбора данных с автоматическим сравнением фактического и проектного положения пути относительно ближайшего рельса соседнего пути и/или других объектов инфраструктуры с возможностью выдачи результатов на экран и/или управляющих сигналов системе управления машиной или непосредственно на рабочие органы машины, при этом дополнительная система сбора данных о текущем положении пути связана с устройством лазерного измерения, выполненным с возможностью измерения расстояния до соседнего пути или объекта инфраструктуры, или вспомогательных реперных объектов и угла между горизонтом и лучом лазера, наведенным на объект относительно известной точки в пространстве, блоком динамического определения наклона измерительной тележки относительно горизонта, блоком измерения пройденного пути.
Технический результат достигается также тем, что устройство лазерного измерения системы сбора данных о фактическом положении пути, включающее корпус, в котором размещены лазерный дальномер, установленный на поворотную платформу, абсолютный энкодер для определения угла наклона поворотной платформы относительно корпуса, инклинометр для калибровки энкодера относительно абсолютного горизонта, привод для изменения вертикального угла наклона поворотной платформы и плата сбора данных с лазерного дальномера, энкодера и инклинометра и управления приводом.
Технический результат достигается также тем, что способ определения пространственного положения и выправки железнодорожного пути, характеризуется тем, что сначала производят геопозиционирование путевой техники посредством данных от локально организованной постоянно действующей базовой сети и с помощью спутниковой системы навигации ГЛОНАСС или GPS в режиме реального времени для фиксирования фактической траектории движения машин в плане и высоте, и, одновременно с этим, принимают измеренные натурные данные о расположении прилегающей инфраструктуры верхнего строения пути от системы лазерного сканирования в точной синхронизации по времени со спутниковой системой навигации для дальнейшего расчета геопозиционирования каждой измеренной точки лазерного отражения согласно зафиксированной траектории движения путевой техники, далее производят обработку полученных данных, которая включает распознавание геометрических образов рельс в их поперечных сечениях и выделение объектов инфраструктуры в совместно обработанных сканерных данных точек лазерного отражения и зафиксированной траектории движения путевой техники, определяют геометрические оси рельсов в пространстве, выполняют построение геопространственной модели объектов инфраструктуры и осей путей, посредством вычисления разности между геометрическими осями рельсов пути и координатами соответствующих объектов инфраструктуры, определяют существующие параметры пути, производят расчет расстояний между осями ремонтируемого и соседнего пути и/или объектами инфраструктуры с учетом проекта, формируют программное задание для работы машин, участвующих в ремонте пути, содержащее набор необходимых данных для автоматической определения отклонения положения фактической оси пути в соответствии с проектом, передают в систему управления машиной для выправки пути, осуществляют ремонт и постановку пути в проектное положение посредством поэтапного выполнения программного задания с учетом данных о расстоянии до рельсы соседнего пути или объекта инфраструктуры или вспомогательных реперных объектов и угла между горизонтом и лучом лазера, наведенным на объект относительно известной точки в пространстве, полученных от устройства лазерного измерения, с учетом наклона измерительной тележки относительно горизонта и расстояния пройденного пути.
Система сбора геопространственных данных о существующем положении пути с помощью спутниковой навигации ГЛОНАСС или GPS с локально организованной постоянно действующей базовой сети и системой лазерного сканирования необходимы для фиксирования фактической траектории движения машин в плане и высоте и получения натурных данных о расположении прилегающей инфраструктуры верхнего строения пути в точной синхронизации по времени со спутниковой системой навигации.
Система обработки данных, выполненная с возможностью получения натурных данных существующего положения пути и прилегающей инфраструктуры от системы лазерного сканирования, позволяет осуществить автоматическое распознавание из 3D-облака точек геометрических образов рельсов пути и объектов инфраструктуры с определением их координат с последующим построением геопространственной модели осей рельсов и объектов инфраструктуры в пространстве с определенными координатами. Заявленная система обработки данных необходима для выполнения обработки натурной и проектной трехмерной модели пути, определения натурных параметров пути в плане, по уровню и в профиле, осуществления расчета расстояний между осями ремонтируемого и соседнего пути и/или объектами инфраструктуры с учетом проекта, определения перемещений пути для реализации проекта, и формирования программного задания для машин, участвующих в ремонте пути, для постановки пути в проектное положение с проектных параметров и пространственного положения пути относительно объектов инфраструктуры, включая соседний путь.
Система управления машиной для выправки пути, связанная с дополнительной системой сбора данных о фактическом положении пути, выполненная с возможностью реализации программного задания, на основе измерений, полученных от дополнительной системы сбора данных с автоматическим сравнением фактического и проектного положения пути относительно ближайшего рельса соседнего пути и/или других объектов инфраструктуры с возможностью выдачи результатов на экран и/или управляющих сигналов системе управления машиной или непосредственно на рабочие органы машины, позволяет осуществлять точную постановку пути в проектное положение с поэтапным контролем в соответствие с фактическим положением пути. При этом, наличие устройства лазерного измерения, выполненного с возможностью измерения расстояния до соседнего пути или объекта инфраструктуры или вспомогательных реперных объектов и угла между горизонтом и лазера, наведенным на объект относительно известной точки в пространстве, позволяет осуществлять корректировку этапов выправки пути с учетом их превышений по высоте, и, как следствие, обеспечить эффективность проведения путевых работ.
Представленные система и способ определения пространственного положения и выправки железнодорожного пути обеспечивают повышение технологичности процессов за счет уменьшения количества операций, связанного с исключением необходимости съемки натурного положения пути перед каждым этапам работы машины, отсутствия необходимости в создании опорной геодезической сети и выноса проекта в натуру, возможности сокращения количества экипажа машины за счет исключения необходимости проведения промежуточных операций; повышение безопасности процессов за счет отсутствия необходимости нахождения члена экипажа машины на соседнем (действующем) пути во время работы; в повышении эффективности процессов за счет увеличения производительности работы по выправке пути, обусловленного возможностью продолжения работы машины в момент пропуска поездов по соседнему пути, увеличения производительности машины за счет исключения использования ручных операций и контроля параметров работы машины, автоматизации процесса пооперационного контроля непосредственно в момент работы машины.
Важным является то, что дополнительная система сбора данных о фактическом положении пути также связана с блоком динамического определения наклона измерительной тележки относительно горизонта и блоком измерения пройденного пути. Установлено, что совокупность данных, полученных от представленных источников, способствует осуществлению высокоточной выправки с регулированием процесса в зависимости от положения пути.
Заявленная конструкция устройства лазерного измерения обеспечивает выполнение замеров расстояний от восстанавливаемого пути до соседнего пути или объекта инфраструктуры или вспомогательных реперных объектов и угла между горизонтом и лазера, наведенным на объект относительно известной точки в пространстве. Лазерный дальномер, установленный на поворотную платформу, необходим для генерирования лучей: прямого, направленного на объект, расстояние до которого необходимо определить, и наклонного, направленного на объект, для определения его высоты. Абсолютный энкодер необходим для определения угла наклона поворотной платформы относительно корпуса, вращение которой, посредством привода, позволяет формировать наклонные лучи. Устройство лазерного измерения может быть также оснащено камерой для удаленного наблюдения и наведения луча лазерного дальномера на объект, установленной на поворотную платформу.
Устройство лазерного измерения может быть также оснащено абсолютным инклинометром для установки и калибровки положения поворотной платформы относительно горизонта.
Устройство лазерного измерения может быть также оснащено маятником для определения наклона корпуса прибора относительно горизонта.
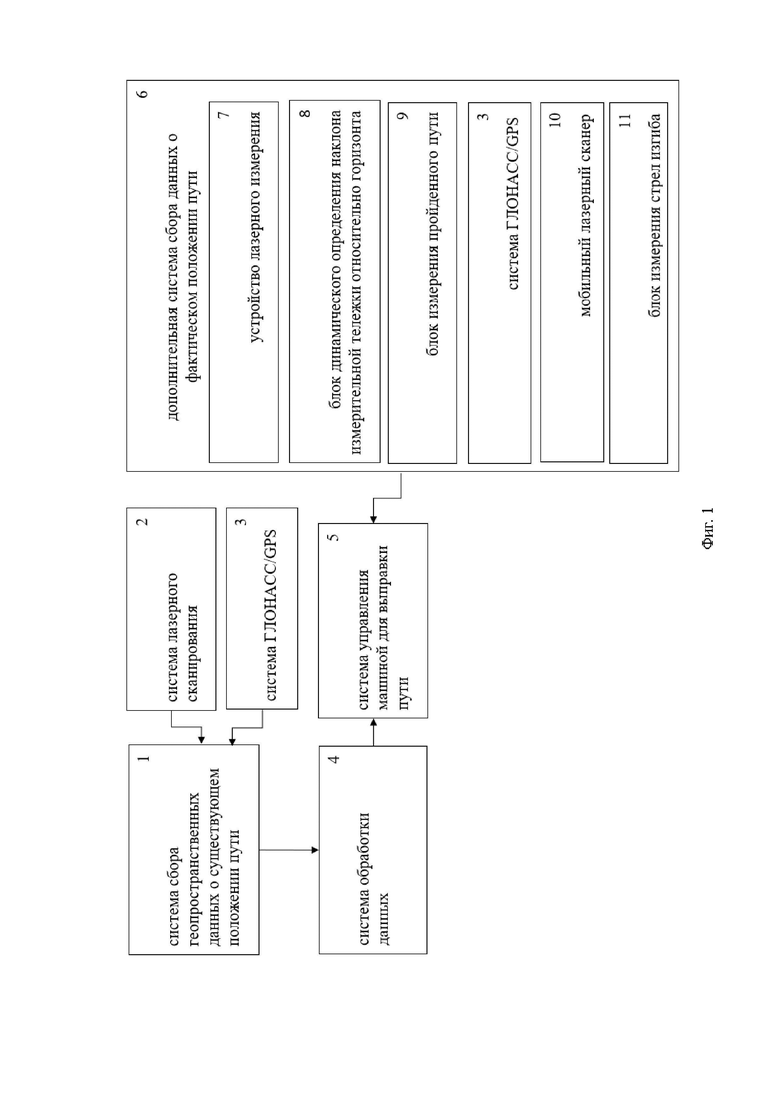
Заявляемое техническое решение далее поясняется с помощью фигуры, на которой условно представлена структура (блок-схема) системы для определения пространственного положения и выправки железнодорожного пути.
На фиг. 1 отмечены следующие элементы:
- система (1) сбора геопространственных данных о существующем положении пути;
- система (2) ГЛОНАСС или GPS;
- система (3) лазерного сканирования;
- система (4) обработки данных;
- система (5) управления машиной для выправки пути;
- дополнительная система (6) сбора данных о фактическом положении пути;
- устройство (7) лазерного измерения;
- блок (8) динамического определения наклона измерительной тележки относительно горизонта;
- блок (9) измерения пройденного пути;
- мобильный лазерный сканер (10);
- блок (11) измерения стрел изгиба.
Далее со ссылками на фигуры описана система для определения пространственного положения и выправки железнодорожного пути и устройство 7 лазерного измерения системы 6 сбора данных о фактическом положении пути.
Система для определения пространственного положения и выправки железнодорожного пути включает систему 1 сбора геопространственных данных о существующем положении пути с помощью системы 2 спутниковой навигации ГЛОНАСС или GPS с локально организованной постоянно действующей базовой сети и системой 2 лазерного сканирования, систему 4 обработки данных, систему 5 управления машиной для выправки пути, связанную с дополнительной системой 6 сбора данных о фактическом положении пути.
Система 4 обработки данных выполнена с возможностью получения натурных данных существующего положения пути и прилегающей инфраструктуры от системы 2 лазерного сканирования, автоматического распознавания из 3D-облака точек образа рельсов пути и объектов инфраструктуры с определением их координат с последующим построением геопространственной модели осей рельсов и объектов инфраструктуры в пространстве с определенными координатами, выполненную с возможностью обработки натурной и проектной трехмерной модели пути, определения натурных параметров пути в плане, по уровню и в профиле, определения перемещений пути для реализации проекта, и формирования программного задания для машин, участвующих в ремонте пути, для постановки пути в проектное положение с учетом проектных параметров и пространственного положения пути относительно объектов инфраструктуры, включая соседний путь.
Система 5 управления машиной для выправки пути выполнена с возможностью реализации программного задания, на основе измерений полученных от дополнительной системы 6 сбора данных с автоматическим сравнением фактического и проектного положения пути относительно ближайшего рельса соседнего пути и/или других объектов инфраструктуры с возможностью выдачи результатов на экран и/или управляющих сигналов системе 5 управления машиной или непосредственно на рабочие органы машины.
Дополнительная система 6 сбора данных о текущем положении пути связана с устройством 7 лазерного измерения, выполненным с возможностью измерения расстояния до соседнего пути или объекта инфраструктуры или вспомогательных реперных объектов и угла между горизонтом и лучом лазера, наведенным на объект относительно известной точки в пространстве, блоком 8 динамического определения наклона измерительной тележки относительно горизонта и блоком 9 измерения пройденного пути. Дополнительная система 6 сбора данных о текущем положении пути может быть также связана с блоком определения геопространственных данных с помощью системы 3 спутниковой навигации ГЛОНАСС или GPS и/или мобильного лазерного сканера 10; или с блоком 11 измерения стрел изгиба.
Устройство 7 лазерного измерения системы 6 сбора данных о фактическом положении пути включает корпус с поворотной платформой, в котором размещены лазерный дальномер, установленный на платформу, абсолютный энкодер для определения угла наклона платформы относительно корпуса, инклинометр для калибровки энкодера относительно абсолютного горизонта, привод для изменения вертикального угла наклона платформы и плата сбора данных с лазерного дальномера, энкодера и инклинометра и управления приводом. Устройство 7 лазерного измерения может дополнительно включать камеру для удаленного наблюдения и наведения луча лазерного дальномера на объект, установленную на поворотную платформу.
Способ определения пространственного положения и выправки железнодорожного пути осуществляется следующим образом.
Изначально производят геопозиционирование путевой техники посредством данных от локально организованной постоянно действующей базовой сети и с помощью спутниковой системы 3 навигации ГЛОНАСС или GPS в режиме реального времени для фиксирования фактической траектории движения машин в плане и высоте.
Одновременно с этим, принимают измеренные натурные данные о расположении прилегающей инфраструктуры верхнего строения пути от системы 2 лазерного сканирования в точной синхронизации по времени со спутниковой системой 3 навигации для дальнейшего расчета геопозиционирования каждой измеренной точки лазерного отражения согласно зафиксированной траектории движения путевой техники.
Затем производят обработку полученных данных, которая включает распознавание геометрических образов рельс в их поперечных сечениях и выделение объектов инфраструктуры в совместно обработанных сканерных данных точек лазерного отражения и зафиксированной траектории движения путевой техники. Далее определяют геометрические оси рельсов в пространстве, выполняют построение геопространственной модели объектов инфраструктуры и осей путей, посредством вычисления разности между геометрическими осями рельсов пути и координатами соответствующих объектов инфраструктуры, определяют существующие параметры пути, производят расчет расстояний между осями ремонтируемого и соседнего пути и/или объектами инфраструктуры с учетом проекта, после чего, формируют программное задание для работы машин, участвующих в ремонте пути, содержащее набор необходимых данных для автоматического определения отклонения положения фактической оси пути в соответствии с проектом. Программное задание передают в систему 5 управления машиной для выправки пути и осуществляют ремонт и постановку пути в проектное положение посредством поэтапного выполнения программного задания с учетом данных о расстоянии до рельсы соседнего пути или объекта инфраструктуры или вспомогательных реперных объектов и угла между горизонтом и лучом лазера, наведенным на объект относительно известной точки в пространстве, полученных от устройства 7 лазерного измерения, с учетом наклона измерительной тележки относительно горизонта и расстояния пройденного пути.
Устройство 7 лазерного измерения системы 6 сбора данных о фактическом положении пути устанавливают на измерительную тележку, являющейся частью машины и/или на раму машины и/или на отдельную самостоятельную тележку, опирающеюся своими колесами на ремонтируемый путь.
Ремонт и постановку пути в проектное положение могут также осуществлять с учетом геопространственных данных с помощью спутниковой системы 3 навигации ГЛОНАСС или GPS и/или мобильного лазерного сканера 10, а также с учетом стрел изгиба в плане и профиле (блок 11).
Далее представлен один из возможных примеров реализации способа определения пространственного положения и выправки железнодорожного пути.
На первом этапе производят изыскание местности на момент наличия постоянно действующих базовых станций (ПДБС) ГЛОНАСС или GPS, или производят подготовку собственной “временной” сети ПДБС.
Далее по рабочему участку производится прокат системы на подвижной железнодорожной единице, с целью сбора геопространственных данных о фактическом состоянии рабочего и соседнего пути с прилегающей инфраструктурой с лазерной привязкой междупутий в плане и высоте посредством системы 2 лазерного сканирования.
Полученные данные передаются в систему 4 обработки данных, где, посредством программных обеспечений осуществляется последовательная обработка данных, распознавание образов рельс и объектов инфраструктуры. Далее производят расчет двух осей пути с последующим построением трехмерной модели пути и объектов инфраструктуры. Производят расчет расстояний между осями ремонтируемого и соседнего пути и/или объектами инфраструктуры с учетом проектных параметров и проектных расстояний до соседнего пути и объектов инфраструктуры. В случаях возникновения коллизий между проектными параметрами и расстояний до объектов инфраструктуры включая соседний путь вносятся корректировки в проектное решение. Определяют перемещение пути для реализации проекта и формируют программное задание для автоматической корректировки положения фактической оси пути с помощью специально оборудованных путевых машин.
В предпочтительном варианте реализации, система обработки данных, представляет собой программно-аппаратный комплекс, включающий блок ввода/вывода данных, ПО для реализации алгоритмов построения 3д модели, вычислительный блок для расчета расстояний, вычислительный блок определения параметров пути, вычислительный блок перемещений пути, блок памяти и база данных, блок приема и передачи информации, сервер.
Полученное программное задание загружается в систему управления путевыми машинами выполняющих работу на различных этапах капитального ремонта (электробалластер, ВПО-С, ЩОМ, ВПР “Дуомат”).
В момент выправки, для определения отклонения положения пути от проекта, система управления машиной также получает данные от устройства 7 лазерного сканирования о расстоянии до рельсы соседнего пути или объекта инфраструктуры или вспомогательных реперных объектов и угла между горизонтом и лучом лазера, наведенным на объект относительно известной точки в пространстве, а также учитывает наклон измерительной тележки относительно горизонта посредством маятника и расстояния пройденного пути (мерное колесо, инкрементальный энкодер) путем сравнения текущего положения пути с проектом, по которому было сформировано программное задание.
Ремонт и постановку пути в проектное положение могут также осуществлять с учетом геопространственных данных с помощью системы 3 спутниковой навигации ГЛОНАСС или GPS и/или мобильного лазерного сканера 10, а также с учетом стрел изгиба в плане и профиле.
Заявленные система и способ для определения пространственного положения и выправки железнодорожного пути позволяет реализовать полный цикл капитального ремонта железнодорожного пути от этапа сбора данных, до реализации проекта на местности, со своевременным контролем на ключевых этапах смены ремонтной путевой техники выполнения программного задания в едином цифровом поле взаимодействия.
Представленные фигура, описание структуры системы и этапов способа не исчерпывают возможные варианты исполнения и не ограничивают каким-либо образом объем заявляемого технического решения. Возможны иные варианты исполнения и использования в объеме заявляемой формул.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2565429C1 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2454498C1 |
| Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути | 2022 |
|
RU2793867C1 |
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2001 |
|
RU2212486C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОДОЛЬНО-НАПРЯЖЕННОГО СОСТОЯНИЯ РЕЛЬСОВЫХ ПЛЕТЕЙ БЕССТЫКОВОГО ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2569504C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2020 |
|
RU2740485C1 |
| Система распределенного контроля железнодорожного пути для высокоскоростного движения | 2017 |
|
RU2671796C1 |
Группа изобретений относится к системам для определения положения железнодорожных путей и осуществления путевых работ. Система для определения пространственного положения и выправки железнодорожного пути включает систему сбора геопространственных данных о существующем положении пути, систему обработки данных, систему управления машиной для выправки пути, дополнительную систему сбора данных о текущем положении пути, связанную с устройством лазерного измерения. Согласно способу определения пространственного положения и выправки железнодорожного пути производят геопозиционирование путевой техники посредством данных от локально организованной постоянно действующей базовой сети и с помощью спутниковой системы навигации, принимают натурные данные о расположении прилегающей инфраструктуры верхнего строения пути от системы лазерного сканирования, производят обработку данных, распознавание геометрических образов рельсов и выделение объектов инфраструктуры в сканерных данных точек лазерного отражения и зафиксированной траектории движения путевой техники, определяют геометрические оси рельсов в пространстве, выполняют построение геопространственной модели объектов инфраструктуры и осей путей, определяют параметры пути, производят расчет расстояний между осями ремонтируемого и соседнего пути и/или объектами инфраструктуры с учетом проекта, формируют программное задание и передают в систему управления машиной для выправки пути, осуществляют ремонт и постановку пути в проектное положение. В результате повышается технологичность, безопасность и эффективность процессов, направленных на выправку железнодорожного пути, а также достигается автоматизация процесса пооперационного контроля. 3 н. и 5 з.п. ф-лы, 1 ил.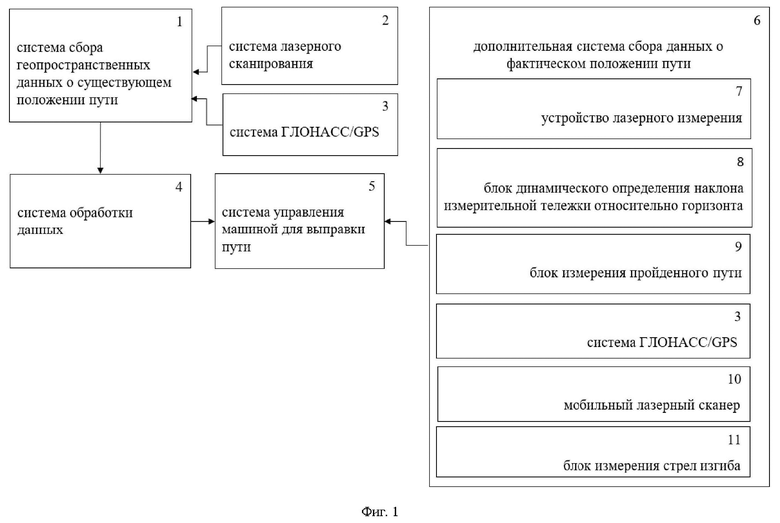
1. Система для определения пространственного положения и выправки железнодорожного пути, включающая систему сбора геопространственных данных о существующем положении пути с помощью системы спутниковой навигации ГЛОНАСС или GPS с локально организованной постоянно действующей базовой сети и системы лазерного сканирования, систему обработки данных, выполненную с возможностью получения натурных данных существующего положения пути и прилегающей инфраструктуры от системы лазерного сканирования, автоматического распознавания из 3D-облака точек образа рельсов пути и объектов инфраструктуры с определением их координат, с последующим построением геопространственной модели осей рельсов и объектов инфраструктуры в пространстве с определенными координатами, обработки натурной и проектной трехмерной модели пути, определения натурных параметров пути в плане, по уровню и в профиле, определения перемещений пути для реализации проекта, и формирования программного задания для машин, участвующих в ремонте пути, для постановки пути в проектное положение с учетом проектных параметров и пространственного положения пути относительно объектов инфраструктуры, включая соседний путь, систему управления машиной для выправки пути, связанную с дополнительной системой сбора данных о фактическом положении пути, выполненную с возможностью реализации программного задания, на основе измерений, полученных от дополнительной системы сбора данных с автоматическим сравнением фактического и проектного положения пути относительно ближайшего рельса соседнего пути и/или других объектов инфраструктуры с возможностью выдачи результатов на экран и/или управляющих сигналов системе управления машиной или непосредственно на рабочие органы машины, при этом дополнительная система сбора данных о текущем положении пути связана с устройством лазерного измерения, выполненным с возможностью измерения расстояния до соседнего пути или объекта инфраструктуры, или вспомогательных реперных объектов и угла между горизонтом и лучом лазера, наведенным на объект относительно известной точки в пространстве, блоком динамического определения наклона измерительной тележки относительно горизонта, блоком измерения пройденного пути.
2. Система для определения пространственного положения и выправки железнодорожного пути по п. 1, отличающаяся тем, что дополнительная система сбора данных о текущем положении пути связана с блоком определения геопространственных данных с помощью системы спутниковой навигации ГЛОНАСС или GPS и/или мобильного лазерного сканера.
3. Система для определения пространственного положения и выправки железнодорожного пути по п. 1, отличающаяся тем, что дополнительная система сбора данных о текущем положении пути связана с блоком измерения стрел изгиба.
4. Устройство лазерного измерения системы сбора данных о фактическом положении пути, включающее корпус, в котором размещены лазерный дальномер, установленный на поворотную платформу, абсолютный энкодер для определения угла наклона поворотной платформы относительно корпуса, инклинометр для калибровки энкодера относительно абсолютного горизонта, привод для изменения вертикального угла наклона поворотной платформы и плата сбора данных с лазерного дальномера, энкодера и инклинометра и управления приводом.
5. Устройство лазерного измерения по п. 4, отличающееся тем, что включает камеру для удаленного наблюдения и наведения луча лазерного дальномера на объект, установленную на поворотную платформу.
6. Способ определения пространственного положения и выправки железнодорожного пути, в котором сначала производят геопозиционирование путевой техники посредством данных от локально организованной постоянно действующей базовой сети и с помощью спутниковой системы навигации ГЛОНАСС или GPS в режиме реального времени для фиксирования фактической траектории движения машин в плане и высоте, и, одновременно с этим, принимают измеренные натурные данные о расположении прилегающей инфраструктуры верхнего строения пути от системы лазерного сканирования в точной синхронизации по времени со спутниковой системой навигации для дальнейшего расчета геопозиционирования каждой измеренной точки лазерного отражения согласно зафиксированной траектории движения путевой техники, далее производят обработку полученных данных, распознавание геометрических образов рельсов в их поперечных сечениях и выделение объектов инфраструктуры в совместно обработанных сканерных данных точек лазерного отражения и зафиксированной траектории движения путевой техники, определяют геометрические оси рельсов в пространстве, выполняют построение геопространственной модели объектов инфраструктуры и осей путей, посредством вычисления разности между геометрическими осями рельсов пути и координатами соответствующих объектов инфраструктуры, определяют существующие параметры пути, производят расчет расстояний между осями ремонтируемого и соседнего пути и/или объектами инфраструктуры с учетом проекта, формируют программное задание для работы машин, участвующих в ремонте пути, содержащее набор необходимых данных для автоматического определения отклонения положения фактической оси пути в соответствии с проектом, передают в систему управления машиной для выправки пути, осуществляют ремонт и постановку пути в проектное положение посредством поэтапного выполнения программного задания с учетом данных о расстоянии до рельса соседнего пути или объекта инфраструктуры или вспомогательных реперных объектов и угла между горизонтом и лучом лазера, наведенным на объект относительно известной точки в пространстве, полученных от устройства лазерного измерения, с учетом наклона измерительной тележки относительно горизонта и расстояния пройденного пути.
7. Способ определения пространственного положения и выправки железнодорожного пути по п. 6, отличающийся тем, что ремонт и постановку пути в проектное положение осуществляют с учетом геопространственных данных с помощью системы спутниковой навигации ГЛОНАСС или GPS.
8. Способ определения пространственного положения и выправки железнодорожного пути по п. 6, отличающийся тем, что ремонт и постановку пути в проектное положение осуществляют дополнительно с учетом стрел изгиба в плане и профиле.
| Устройство для регулирования производительности поршневого компрессора | 1951 |
|
SU99786A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Система для контроля геометрии рельсового пути | 2022 |
|
RU2784216C1 |
| УСТРОЙСТВО ТРЕХМЕРНОГО СКАНИРОВАНИЯ | 2016 |
|
RU2651608C1 |
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

