Техническое решение относится к области железнодорожной автоматики и телемеханики для непрерывной регистрации пространственного положения рельсовой колеи при диагностике пути, проектно-изыскательских и других видов работ.
Известны способ определения пространственных координат и геометрических параметров рельсового пути и устройство для его осуществления [1]. Устройство содержит путеизмерительную тележку, включающую две колесные пары, которые связаны между собой опорной рамой, установленной перпендикулярно относительно направления движения. При этом в оконечных частях указанной опорной рамы над соответствующими рельсовыми нитями, установлены первая и вторая спутниковые антенны. Фазовые центры антенн лежат на одной прямой в плоскости, перпендикулярной направлению движения путеизмерительной тележки. Указанные спутниковые антенны связаны соответственно с первым и вторым входами спутникового приемника, вход-выход которого связан с принимающим сигналы базовой спутниковой станции модемом, а выход указанного спутникового приемника соединен с бортовым компьютером.
Недостатком данного технического решения является более высокая погрешность спутникового приемника по сравнению с погрешностью оптических визирных или геодезических приборов. К тому же при такой конструкции устройства появляется погрешность результатов измерений вследствие того, что плоскость образованная двумя точками с координатами в фазовых центрах спутниковых антенн и третьей точкой между ними, получаемой усреднением их координат, будет отклоняться от перпендикулярности к вектору движения устройства. При этом отклонение, а вслед за ней и погрешность будут возрастать с увеличением разности уклонов рельсовых нитей относительно друг друга.
Наиболее близким к предлагаемой системе является принятое за прототип техническое решение для определения параметров рельсового пути с использованием визирного оптического прибора [2, 3]. Известный прибор предназначен для определения положения рельсовых нитей в плане и профиле на одном поперечнике с привязкой к реперной сети, в пределах одного искусственного сооружения, стрелочного перевода, пикета. Комплект прибора состоит из зрительной трубы на опоре с круглым уровнем, измерительной и рабочей реек. Зрительная труба вращается на 360° в горизонтальной и в вертикальной плоскостях на одной вертикальной стойке. Горизонтальная опора прибора и вертикальная стойка дополнены кругами для измерения углов. Сам прибор устанавливают на облегченной телескопической треноге. Зрительная труба имеет цилиндрический уровень и представляет собой телескопическую оптическую систему с внутренней фокусировкой, выполняемой вращением кольца кремальеры. В плоскости объектива помещены сетка нитей с горизонтальным, вертикальным и дальномерными штрихами. Измерительная рейка имеет продольную шкалу, к которой при необходимости прикрепляется марка с дополнительной поперечной шкалой. Продольная осевая линия на шкале служит для наводки вертикального штриха сетки трубы при рихтовке пути. Рабочая рейка имеет такую же конструкцию, что и измерительная, только вместо шкалы на штанге навешены две марки с ромбами: верхняя служит для наводки трубы прибора при подъеме пути, нижняя – при рихтовке. Диагонали ромбов рабочей рейки служат условными нулевыми линиями.
Недостатком существующего технического решения является отсутствие автоматизации измерительного процесса, что обуславливает низкую скорость измерений и приводит к увеличению трудоемкости выполнения работ. К тому же данное техническое решение не предусматривает непрерывность измерений на контролируемом участке железнодорожного пути.
Задачей изобретения является повышение производительности работ при проведении натурных съемок с обеспечением непрерывности и высокой точности измерений в пределах одного участка железнодорожного пути. Техническим результатом изобретения являются автоматизация измерительного процесса и конструкция системы, обеспечивающая более высокие точностные характеристики при определении параметров геометрии рельсовой колеи.
Поставленная задача решается благодаря тому, что в способе определения параметров геометрии рельсовой колеи с использованием системы, состоящей из фотограмметрического координатно-измерительного устройства и путеизмерительной тележки, передвигающейся на двух колесных парах, соединенных продольной опорной рамой, устанавливаются три визирные цели, одна на опорной раме, две другие на концах передней оси колесной пары, а над центром указанной оси размещается пластина отражателя лазерного излучения с визирной маркой, при помощи которой фотограмметрическим координатно-измерительным устройством, в процессе движения путеизмерительной тележки, отслеживаются ее перемещения и осуществляется непрерывная регистрацию координат визирных целей, установленных на оси колесной пары над левой и правой нитями рельсового пути соответственно, и по этим координатам определяются параметры геометрии рельсовой колеи.
Заявленный технический результат достигается также тем, что характеризующими элементами системы для определения параметров геометрии рельсовой колеи, согласно изобретению, являются фотограмметрическое координатно-измерительное устройство и дистанционно управляемая путеизмерительная тележка, которая передвигается на двух колесных парах, соединенных продольной опорной рамой, и на которой установлены три визирные цели, одна на опорной раме, две другие на концах передней оси колесной пары, а над центром указанной оси к корпусу шарнирного узла прикреплена, перпендикулярно направлению движения, пластина отражателя лазерного излучения с визирной маркой, в свою очередь фотограмметрическое координатно-измерительное устройство имеет штатив с трегером, обеспечивающего горизонтирование прикрепленной к нему двухосевой платформы с цифровой камерой и дальномером, размещенных таким образом, что лазерный луч дальномера сонаправлен главной оптическая оси фотокамеры, при этом получаемые с фотокамеры снимки обрабатываются бортовым компьютером с целью обнаружения визирной марки и наведения на нее лазерного луча дальномера, в то время как направление вектора главной оптической оси фотокамеры определяется с помощью оптических энкодеров, находящихся на осях платформы.
Отслеживание фотограмметрическим координатно-измерительным устройством перемещений путеизмерительной тележки достигается благодаря тому, что на путеизмерительной тележке установлены три визирные цели, одна из которых имеет форму цилиндра и расположена вертикально вверх на опорной раме, ближе к задней колесной паре, две другие имеют форму шара и расположены на концах передней оси колесной пары, так, что центр оси лежит на одной прямой с их центрами, а визирная марка имеет форму окружности, при этом все визирные цели и марка однотонно окрашены в контрастный цвет, позволяющий визуально различить их на фоне местности.
В процессе движения путеизмерительной тележки, бортовой компьютер с установленной на нем вычислительной программой, осуществляет пересчет регистрируемых текущих значений сферических координат (r1, θ1, φ1) и (r2, θ2, φ2) центров визирных целей, установленных над левой и правой нитями рельсового пути соответственно, в пространственные прямоугольные координаты с их привязкой к реперной железнодорожной сети и определяет по ним параметры геометрии рельсовой колеи.
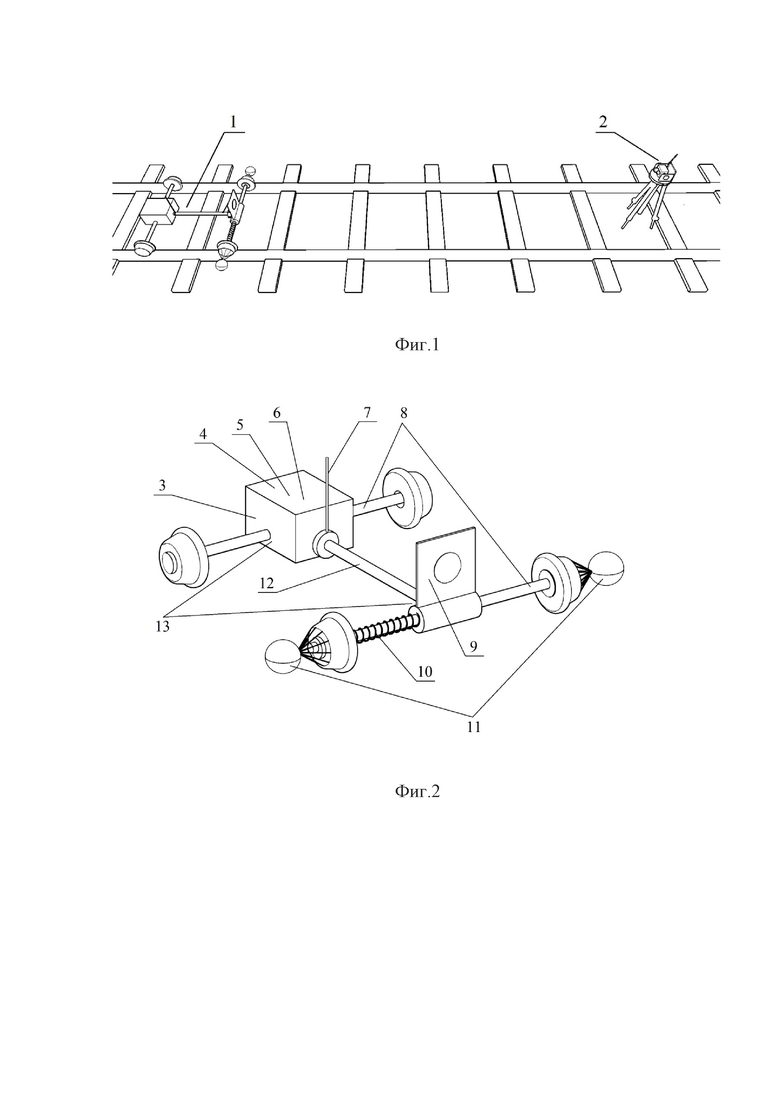
Сущность способа и система, реализующая его, поясняются чертежами. На фиг.1 изображена принципиальная схема размещения элементов системы, согласно изобретению, на фиг.2 – общий вид путеизмерительной тележки, на фиг.3 – общий вид фотограмметрического координатно-измерительного устройства, на фиг.4 – структурная схема системы для определения параметров геометрии рельсовой колеи, на фиг.5 – принципиальная схема формирования изображения в фотокамере, на фиг.6 – принципиальная схема, поясняющая конкретную реализацию способа, согласно изобретению, на фиг.7 – пример результатов работы, выдаваемого фотограмметрической системой.
Основными элементами системы (фиг.1) являются путеизмерительная тележка 1 и фотограмметрическое координатно-измерительное устройство 2, которое устанавливается впереди на железнодорожных путях.
Путеизмерительная тележка 1 (фиг.2) состоит из двух колесных пар 8, соединенных между собой опорной рамой 12. Крепление рамы к передней оси колесной пары осуществляется при помощи шарнирного узла 13. С его помощью обеспечивается устойчивый контакт передней колесной пары с рельсовой колеей. Визирные цели 11 выполнены в форме шара и размещены на обоих концах оси передней колесной пары таким образом, что центр оси лежит на одной прямой с их центрами. Такая конструкция позволяет устранить возникновение погрешности при изменении углового положения путеизмерительной тележки относительно ее центра в процессе движения. Еще одна визирная цель 7, выполненная в форме цилиндра и расположена вертикально вверх на опорной раме 12, ближе к задней колесной паре. Колеса передней колесной пары прижимаются к боковым поверхностям рельсов распирающей пружиной 10, что позволяет определять расстояние между внутренними гранями головок рельсов и контролировать ширину рельсовой колеи. На задней колесной паре размещен отсек с электродвигателем 3, микроконтроллером 4 и аккумуляторной батареей 5. Оснащение путеизмерительной тележки приемником радиосигнала 6 обеспечивает возможность управлять ей дистанционно, что положительно сказывается на производительности и позволяет оператору, одному, контролировать весь измерительный процесс. Над осью передней колесной пары к корпусу подшипникового узла 13 прикреплена пластина отражателя лазерного излучения 9 с визирной маркой в центре, которая имеет форму окружности. Визирные цели 7, 11 и визирная марка на пластине 9 окрашены в контрастный цвет, что позволяет фотограмметрическому координатно-измерительному устройству 2 обнаруживать их на фоне местности и определять по ним координаты рельсовых нитей с любого ракурса в зоне прямой видимости.
Фотограмметрическое устройство 2 (фиг.3) состоит из штатива 14 с установленным на нем трегером 15, который обеспечивает горизонтирование закрепляемой на нем двухосевой платформы 16, на которой, в свою очередь, размещены цифровая фотокамера 23 и лазерный дальномер 22. Вследствие этого обеспечивается горизонтальность оси абсцисс на координатной плоскости ПЗС-матрицы 24 фотокамеры 23, что является важным условием правильной работы системы. Фотокамера 23 установлена на платформе 16 так, что ее главная оптическая ось сонаправлена лазерному лучу дальномера 22. Вычислительная программа, установленная на бортовом компьютере 19, обрабатывает формируемые фотокамерой 23 цифровые снимки с целью обнаружения окружности на отражательной пластине 9. Затем рассчитываются углы отклонения центра визирной марки от главной оптической оси и формируются управляющие команды для двухосевой платформы 16, которая с помощью встроенных в нее шаговых двигателей наводит фотокамеру 23 и лазерный луч дальномера 22 на отражательную пластину 9. Направление вектора главной оптической оси фотокамеры определяется абсолютными оптическими энкодерами 21, также находящимися на осях платформы. Отслеживание визирной марки и наведение производится системой автоматически в режиме реального времени. Также система при помощи радиопередатчика 18 позволяет осуществлять удаленное управление путеизмерительной тележкой 1.
В процессе своего движения, путеизмерительная тележка 1 (фиг.4) передает посредством визирных целей 11, размещенных на оси передней колесной пары 8, форму кривых, образованных точками контакта колес с головками рельсов. Фотограмметрическое устройство 2 вычисляет положение визирных целей 11 по фотоснимкам, полученным при помощи цифровой фотокамеры 23 и, принимая в расчет расстояние до тележки, измеренное лазерным дальномером 22, определяет различные параметры геометрии рельсовой колеи. После того, как путеизмерительная тележка 1 приблизится к фотограмметрическому устройству 2 на расстояние, при котором визирные цели 11 окажутся вне поля зрения его фотокамеры 23, то указанное устройство 2 переустанавливается в конечную точку следующего контролируемого участка пути. Максимально допустимое удаление от путеизмерительной тележки 1 определяется техническими характеристиками используемой фотокамеры 23 и требованиями к точности получаемых результатов измерений. Каждая перестановка устройства 2 сопровождается его повторной привязкой к реперной железнодорожной сети, в процессе которой указанное устройство 2 определяет по реперам свое местоположение.
Способ осуществляют следующим образом.
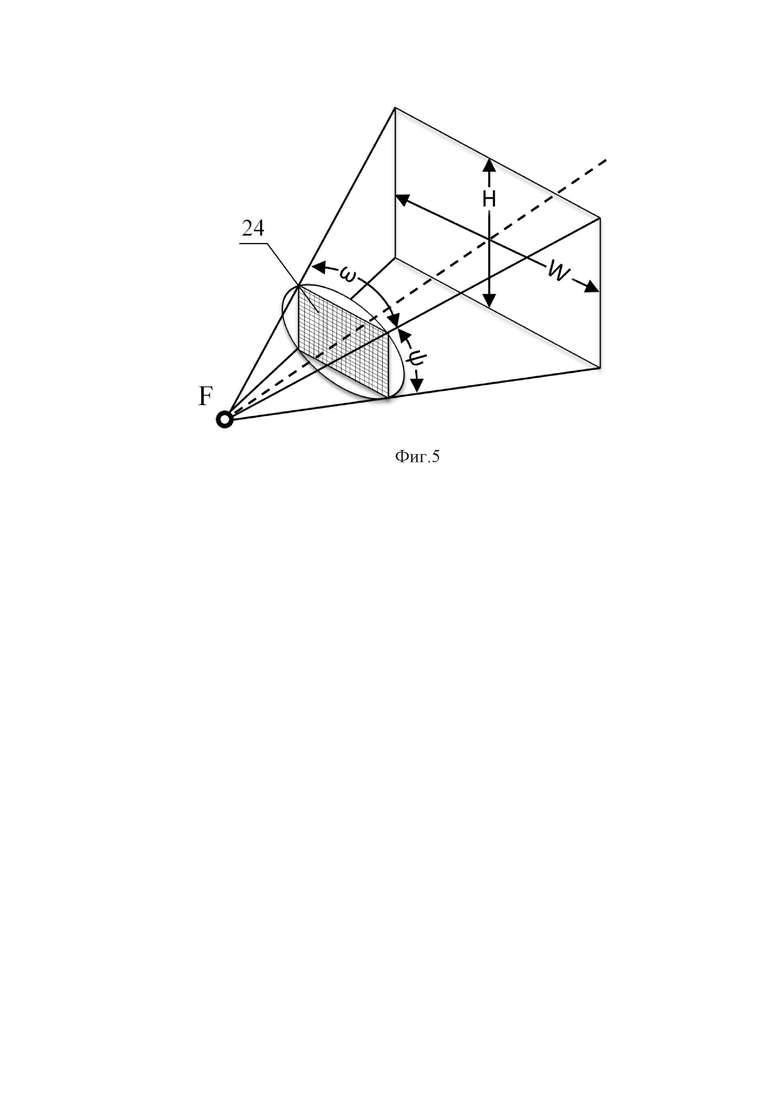
Фотокамера имеет углы обзора ω и ψ по длине и ширине ПЗС-матрицы соответственно (фиг.5). Эти углы задают границы области зрения фотокамеры, представляющей собой прямоугольную усеченную пирамиду высотой r, с основанием длиной W и шириной H. Изображение визирных целей и мишени строится на плоскости ПЗС-матрицы 24 с помощью объектива фотокамеры, задний главный фокус которого обозначен точкой F. Угловое положение визирных целей 



Визирные цели и марка проецируются на ПЗС-матрицу фотокамеры в виде изображений с центрами в точках A″, B″, С″ и D″ (фиг.6, б). Если на изображении построить прямоугольную систему координат, то ∆x и ∆y будут обозначать расстояния между центрами визирных целей A и B по осям X и Y. Эти расстояния необходимы для вычисления в сферической системе координат местоположения любой точки 

где NX, NY – количество пикселей в строке и столбце ПЗС-матрицы.
Чтобы получить расстояние до визирной цели вначале необходимо вычислить длину отрезка A˝ B˝ из выражения:
Длина A˝B˝ на плоскости изображения камеры выражена через пиксели. Для ее преобразования в метрическую меру длины необходимо рассчитать коэффициент преобразования (множитель):
где pix – физический размер пикселя на изображении;
f – фокусное расстояние объектива фотокамеры.
Затем определяется угол между прямой, проходящей через центры мишеней и плоскостью изображения камеры:
Расстояние до точки А можно вычислить из выражения:

где 
Расстояние до точки B определяется из выражения:

где 
Чтобы определить точку контакта колеса тележки с рельсом необходимо вычислить на прямой АВ координаты точки M, которой обозначим центр колеса с прикрепленной к нему визирной целью А. При этом точка М будет располагаться над внутренней гранью головки рельса. Координаты мишеней переводятся из сферической в прямоугольную 
Обозначив 
Следовательно, параметрические уравнения прямой АВ можно записать системой уравнений:
где л – параметр уравнения.
Поскольку длина отрезка АМ известна, то параметр л можно вычислить из следующего отношения:

Длина отрезка AB вычисляется из выражения:

Для вычисления координат центра колеса с визирной целью B, обозначенной точкой N, параметрическое уравнение прямой АВ можно записать в следующем виде:
Вычислив, таким образом, координаты центров колес 

Редуцирование координат 
Ширина рельсовой колеи Si в каждой i-ой точке определяется длиной отрезка MN из выражения:

Уровень рельсовых нитей, под которым понимается разница в расположении верха головок рельсов по высоте, определяется из выражения:
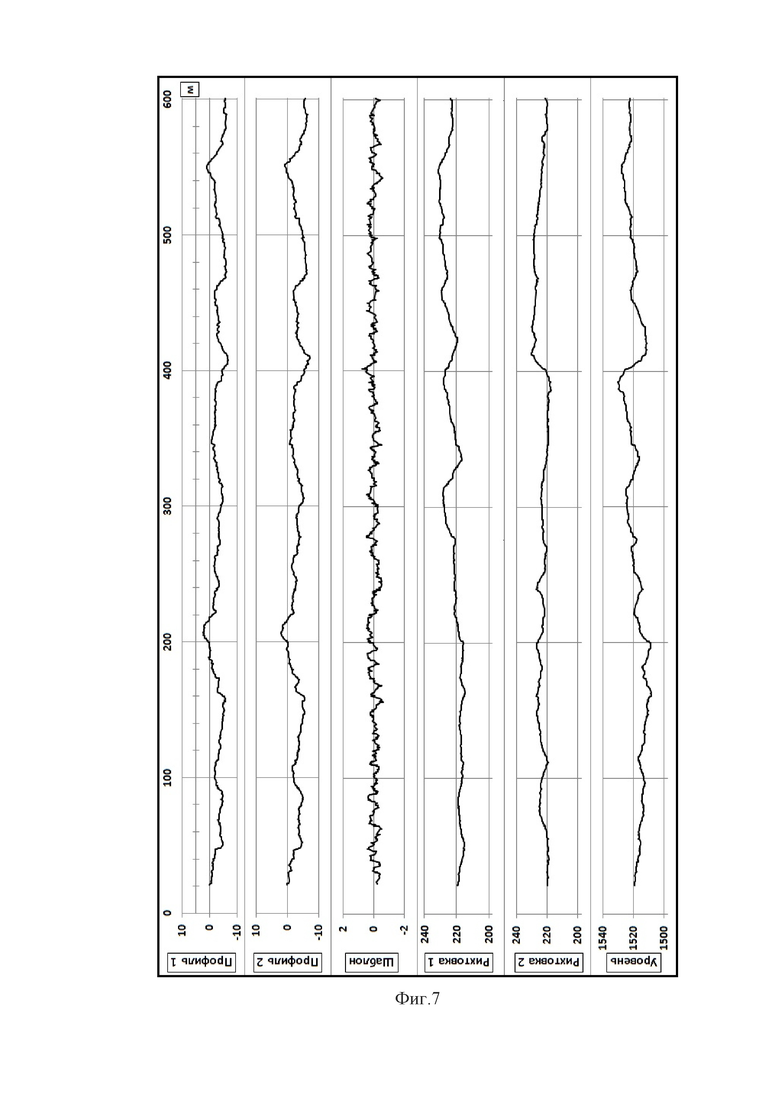
Бортовой компьютер, в соответствии с вычислительной программой, по координатам визирных целей строит две пространственные кривые, определяющие изгибы рельсовых нитей в плане и профиле. В качестве примера, на фиг.7 изображены графики, построенные по координатам рельсовой колеи, полученные при реализации технического решения, согласно изобретению. После того, как путеизмерительная тележка приблизится на расстояние, при котором визирные цели окажутся вне области зрения фотокамеры, фотограмметрическое устройство устанавливается в следующую точку контролируемого участка пути. Максимально допустимое удаление от путеизмерительной тележки определяется техническими характеристиками используемой фотокамеры и требованиями к точности получаемых результатов измерений. Каждая перестановка фотограмметрического устройство сопровождается его повторной привязкой к реперной железнодорожной сети.
Техническое решение согласно изобретению позволило автоматизировать процесс измерения координат рельсовых нитей и снизило трудоемкость работ при определении параметров геометрии рельсовой колеи. Кроме того, была обеспечена непрерывность измерений на всем протяжении одного контролируемого участка железнодорожного пути.
Таким образом, совокупность существенных признаков группы изобретений обеспечила повышение производительности при проведении различного рода работ, связанных с контролем состояния железнодорожного пути, с обеспечением более высокой точности проводимых измерений.
Источники информации
1. Патент РФ № 2628541, МПК B61K9/08, на изобретение «Способ определения пространственных координат и геометрических параметров рельсового пути и устройство для его осуществления».
2. Непомнящих Е. В., Кирпичников К.А. Диагностика состояния железнодорожного пути: учебное пособие по выполнению лабораторных работ для студентов 2 и 4 курса очной и заочной форм обучения специальности 271501 «Строительство железных дорог, мостов и транспортных тоннелей». Чита: ЗабИЖТ, 2012. –109 с.
3. Патент РФ № 2138016, МПК G01C15/12, на изобретение «Визирный оптический прибор».


Изобретение относится к области железнодорожной автоматики и телемеханики для непрерывной регистрации пространственного положения рельсовой колеи при диагностике пути, проектно-изыскательских и других видов работ. Для реализации способа определения параметров геометрии рельсовой колеи используется система, состоящая из путеизмерительной тележки (1) и фотограмметрического координатно-измерительного устройства (2). Путеизмерительная тележка (1) передвигается на двух колесных парах (8), соединенных продольной опорной рамой (12). На тележке установлены три визирные цели (7, 11). Одна имеет форму цилиндра и расположена вертикально вверх на опорной раме ближе к задней колесной паре. Две другие имеют форму шара и расположены на концах передней оси колесной пары. При этом центр оси лежит на одной прямой с их центрами. Над центром указанной оси размещена пластина отражателя лазерного излучения (9) с визирной маркой. С ее помощью фотограмметрическое координатно-измерительное устройство (2) отслеживает перемещения путеизмерительной тележки (1) и осуществляет непрерывную регистрацию координат визирных целей (11), установленных на оси колесной пары над левой и правой нитями рельсового пути соответственно. По этим координатам определяются параметры геометрии рельсовой колеи. В результате обеспечиваются автоматизация процесса, более высокие точностные характеристики при определении параметров геометрии рельсовой колеи. 2 н. и 2 з.п. ф-лы, 7 ил.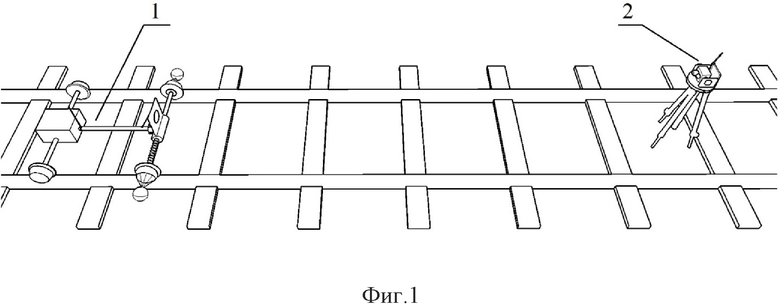
1. Способ определения параметров геометрии рельсовой колеи с использованием системы, состоящей из путеизмерительной тележки и фотограмметрического координатно-измерительного устройства, отличающийся тем, что на путеизмерительной тележке, которая передвигается на двух колесных парах, соединенных продольной опорной рамой, устанавливаются три визирные цели, одна на опорной раме, две другие на концах передней оси колесной пары, а над центром указанной оси размещается пластина отражателя лазерного излучения с визирной маркой, при помощи которой фотограмметрическим координатно-измерительным устройством, в процессе движения путеизмерительной тележки, отслеживаются ее перемещения и осуществляется непрерывная регистрация координат визирных целей, установленных на оси колесной пары над левой и правой нитями рельсового пути соответственно, и по этим координатам определяются параметры геометрии рельсовой колеи.
2. Система для определения параметров геометрии рельсовой колеи, состоящая из фотограмметрического координатно-измерительного устройства и дистанционно управляемой путеизмерительной тележки, которая передвигается на двух колесных парах, соединенных продольной опорной рамой, и на которой установлены три визирные цели, одна на опорной раме, две другие на концах передней оси колесной пары, а над центром указанной оси к корпусу шарнирного узла прикреплена, перпендикулярно направлению движения, пластина отражателя лазерного излучения с визирной маркой, в свою очередь фотограмметрическое координатно-измерительное устройство имеет штатив с трегером, обеспечивающим горизонтирование прикрепленной к нему двухосевой платформы с цифровой камерой и дальномером, размещенных таким образом, что лазерный луч дальномера сонаправлен главной оптической оси фотокамеры, при этом получаемые с фотокамеры снимки обрабатываются бортовым компьютером с целью обнаружения визирной марки и наведения на нее лазерного луча дальномера, в то время как направление вектора главной оптической оси фотокамеры определяется с помощью оптических энкодеров, находящихся на осях платформы.
3. Система по п. 2, отличающаяся тем, что на путеизмерительной тележке установлены три визирные цели, одна из которых имеет форму цилиндра и расположена вертикально вверх на опорной раме, ближе к задней колесной паре, две другие имеют форму шара и расположены на концах передней оси колесной пары так, что центр оси лежит на одной прямой с их центрами, а визирная марка имеет форму окружности, при этом все визирные цели и марка однотонно окрашены в контрастный цвет, позволяющий визуально различить их на фоне местности.
4. Система по п. 2 или 3, отличающаяся тем, что указанный бортовой компьютер снабжен вычислительной программой, осуществляющей пересчет регистрируемых текущих значений сферических координат (r1, θ1, φ1) и (r2, θ2, φ2) центров визирных целей, установленных над левой и правой нитями рельсового пути соответственно, в пространственные прямоугольные координаты с их привязкой к реперной железнодорожной сети и определяющей по ним параметры геометрии рельсовой колеи.
| СПОСОБ ИЗМЕРЕНИЯ РЕЛЬСОВОГО ПУТИ | 2000 |
|
RU2169809C1 |
| ВИЗИРНЫЙ ОПТИЧЕСКИЙ ПРИБОР | 1997 |
|
RU2138016C1 |
| CN 102756744 A, 31.10.2012 | |||
| CN 103552570 A, 05.02.2014. | |||

