Изобретение относится к области вакуумной техники и может быть использовано для передачи прерывистого вращения механизмам и узлам, находящимся в вакуумных камерах технологических установок.
Известен механический вакуумный ввод с сильфонным уплотнением (А.С. СССР №796594, МКИ F16J 15/52, 1979 г.). Устройство содержит корпус, ведущий вал, на который надета гибкая оболочка (сильфон), и ведомый вал.
Недостатками являются:
- изменение давления в рабочей камере, возникающее при растяжении и сжатии гибкого элемента;
- работа только при малых оборотах передачи вращения;
- возможность использования только при невысоком вакууме в рабочей камере.
Известен также механический вакуумный ввод с "магнитным" уплотнением (патент США № 3564469, МКИ F16J 15/00, 1971 г.). Устройство содержит корпус с герметизирующей стенкой. Имеются также два магнита, один из которых установлен на ведущем валу в атмосфере, а другой - на ведомом в вакууме.
Недостатками являются:
- малая передаваемая мощность;
- нежесткая связь между ведущими и ведомыми звеньями;
- конструктивные трудности фиксации положения ведомого звена в вакууме.
Наиболее близким по технической сущности является механический вакуумный ввод с гибким элементом, с наружной стороны которого установлены ролики (патент РФ №2175734, МКИ F16J 15/52, 2001 г.). Устройство содержит корпус, ведущий вал, на котором установлены ролики, подшипники, вставленные во втулку, ведомый вал и гибкую оболочку.
Недостатком является возможность дополнительной деформации гибкой оболочки при создании вакуума и вследствие этого затруднение передачи вращения.
Технический результат:
- обеспечение герметичности вакуумного ввода;
- постоянное возвратно-поступательное перемещение упругого элемента;
- прерывистое вращение стола с деталями по заданному закону в одном направлении;
- возможность использования в высоковакуумных рабочих камерах.
Технический результат достигается тем, что в механическом вакуумном вводе, содержащем привод вращения и упругий элемент, в отличие от прототипа ведущий вал выполнен в виде вала с кулачком на конце, а упругий элемент выполнен в форме деформированного полого тора, плотно наполненного шариками с возможностью их возвратно-поступательного перемещения, и введен храповой механизм преобразования деформаций упругого элемента во вращательное движение планетарного механизма рабочего стола.
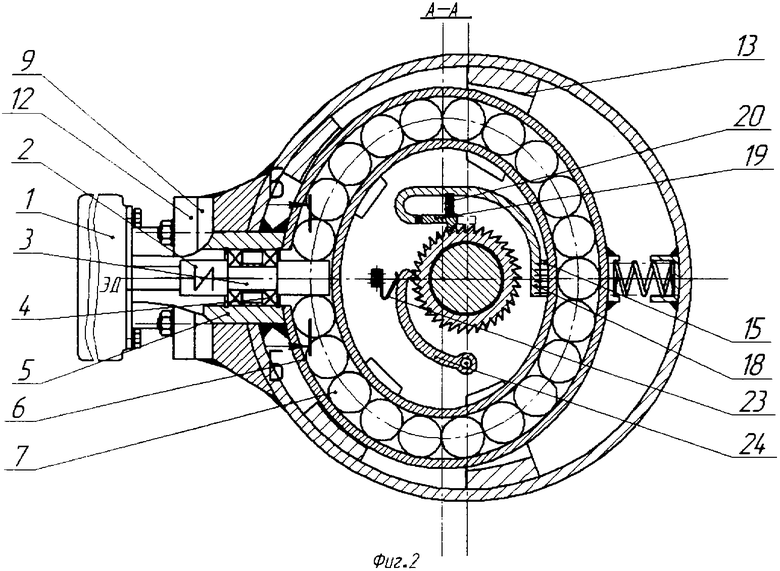
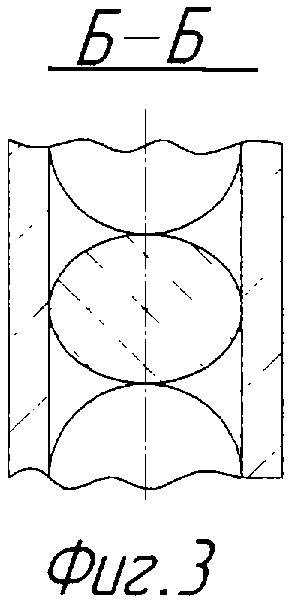
Устройство поясняется чертежами. На фиг.1 показан общий вид механического вакуумного ввода, на фиг.2 - вид А на фиг.1, на фиг.3 - вид Б на фиг.2.
Механический вакуумный ввод содержит электродвигатель 1, муфту 2, ведущий вал 3, смонтированный на подшипниках 4, установленных во втулке 5, приваренной к упругому элементу 6. На конце ведущего вала 3 выполнен кулачок в форме эллипса (вид Б на фиг.2). Кулачок вставлен между шариками 7, заполняющими полость упругого элемента 6 в форме деформированного полого тора. Втулка 5 проходит сквозь корпус рабочей камеры 8 и заканчивается приваренным фланцем 9, к которому при помощи шпилек 10 и гаек 11 прикреплен переходник 12 с присоединенным электродвигателем 1. Положение упругого элемента 6 ограничено вилками 13. К противоположному концу упругого элемента 6 приварены пята 14 и пластина 15, которые повторяют кривизну поверхности упругого элемента 6 в месте соединения. В пяту 14 вставлена пружина 16, которая другим концом входит в стакан 17, кроме этого стакан 17 приварен к корпусу вакуумной камеры 8. Кроме этого, к пластине 15 приварена загнутая пластина 18, которая входит в петлевое соединение с толкателем 19, выполненным в виде рейки с одним зубом. А также толкатель 19 прижат пружиной 20 к храповому колесу 21, которое является неотъемлемой частью храпового механизма, кроме этого, в храповой механизм входят закрепленная на основе 22 пружина 23 и собачка 24. При этом основа 22 приварена к корпусу рабочей камеры 8 и храповое колесо 21 прикреплено к основанию 25, которое имеет возможность вращения относительно неподвижного вала 26 при помощи подшипников 27. А также основание 25 является ведущим звеном планетарного механизма, который состоит из прикрепленного к неподвижному валу 26 зубчатого колеса 28 и сателлитов 29. Кроме того, на сателлитах 29 закреплены обрабатываемые в вакуумной камере детали 30.
Частота вращения кулачка в данном механизме может изменяться в зависимости от требуемой частоты вращения рабочего стола с деталями.
Работа механического вакуумного ввода осуществляется следующим образом.
Вращение от электродвигателя 1 передается через муфту 2 на ведущий вал 3, вследствие чего кулачок в форме эллипса совершает четверть оборота и раздвигает шарики 7 на величину разности большей и малой осей кулачка, и в результате возникает переменная результирующая сила, которая расправляет деформированный пружиной 16 упругий элемент 6 и заставляет его совершать поступательное движение, которое передается на жестко связанный с упругим элементом 6 толкатель 19, в результате чего толкатель 19 поворачивается против часовой стрелки на определенный угол, при этом пружина 23, которая закреплена на основе 22, а основа 22 приварена к основанию корпуса рабочей камеры 8, создает момент, прижимающий собачку 24 к храповому колесу 21, которое прикреплено к основанию 25. При повороте кулачка в форме эллипса на четверть оборота расстояние между шариками 7 сокращается на величину разности большей и малой осей кулачка, при этом пружина 16 помогает принять упругому элементу 6 первоначальную деформированную форму, а также пружина 20 вводит толкатель 19 в зацепление с храповым колесом 21, которое прикреплено к основанию 25, вследствие чего основание 25 совершает вращательное движение с поворотом против часовой стрелки вокруг своей оси, в результате жесткого соединения вращение передается на сателлиты 29, которые входят в зацепление с зубчатым колесом 28, закрепленным на неподвижном валу 26 при помощи шлицевого соединения, и которые являются составной частью планетарного механизма, а также на неподвижном валу 26 установлены нижние подшипники 27, на которых держится основание 25, и верхние подшипники 27, которые предопределяют свободное вращение основания 25 относительно неподвижного зубчатого колеса 28, тем самым обрабатываемые детали 30, которые закреплены на сателлитах 29, совершают планетарное движение, также в этом случае собачка 24 поворачивается на определенный угол и отклоняет пружину 23, в это время цилиндр завершил свой полуоборот, и упругий элемент 6 в виде полого тора принял свою первоначальную деформированную форму. Герметичность вакуумного ввода достигается тем, что упругий элемент 6 в форме деформированного полого тора приварен к втулке 5, которая приварена к корпусу вакуумной камеры 8, и тем самым полностью изолирует вакуумную камеру от атмосферного воздействия.
Итак, заявленное изобретение позволяет обеспечить герметичный вакуумный ввод, постоянное возвратно-поступательное перемещение упругого элемента, который выполнен в форме деформированного полого тора, прерывистое вращение стола с деталями по заданному закону в одном направлении и возможность использования в высоковакуумных рабочих камерах.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2007 |
|
RU2345880C1 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2005 |
|
RU2288834C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2033542C1 |
| ВАКУУМНЫЙ МЕХАНИЧЕСКИЙ ВВОД | 2007 |
|
RU2339863C1 |
| РАБОЧИЙ МЕХАНИЗМ РУЧНОЙ МАШИНЫ ДЛЯ УДАРНОГО СВЕРЛЕНИЯ И/ИЛИ ДОЛБЛЕНИЯ | 2010 |
|
RU2550469C2 |
| Устройство для очистки внутренней поверхности трубопроводов | 1989 |
|
SU1664425A1 |
| МЕХАНИЧЕСКИЙ ВАКУУМНЫЙ ВВОД | 2002 |
|
RU2231704C2 |
| Полуавтомат для сборки пластинчатых магнитопроводов трансформаторов | 1983 |
|
SU1176395A1 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2012 |
|
RU2508978C2 |
| Механизм для преобразования непрерывного вращательного движения в прерывистое | 1990 |
|
SU1747770A1 |
Изобретение относится к области вакуумной техники и может быть использовано для передачи прерывистого вращения механизмам и узлам, находящимся в вакуумных камерах технологических установок. Технический результат: обеспечение герметичного вакуумного ввода, постоянное возвратно-поступательное перемещение упругого элемента, прерывистое вращение стола с деталями по заданному закону в одном направлении, возможность использования в высоковакуумных рабочих камерах. Вакуумный механический ввод содержит ведущий вал, который выполнен в виде вала с кулачком на конце в форме эллипса, упругий элемент выполнен в виде деформированного полого тора, плотно наполненного шариками. Устройство преобразования возвратно-поступательного перемещения упругого элемента во вращательное движение основания выполнено в виде храпового механизма. Устройство преобразования вращения основания во вращательное движение стола с деталями выполнено в виде планетарного механизма. 3 ил.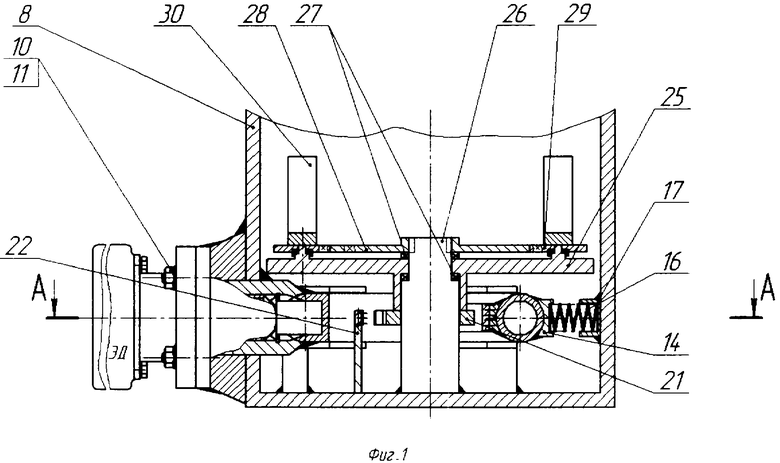
Механический вакуумный ввод, содержащий ведущий вал, упругий элемент, отличающийся тем, что ведущий вал выполнен в виде вала с кулачком на конце, а упругий элемент выполнен в форме деформированного полого тора, плотно наполненного шариками с возможностью их возвратно-поступательного перемещения и введен храповой механизм преобразования деформаций упругого элемента во вращательное движение планетарного механизма рабочего стола.
| МЕХАНИЧЕСКИЙ ВАКУУМНЫЙ ВВОД | 2000 |
|
RU2175734C1 |
| ГЕРМЕТИЧНЫЙ ВВОД | 1993 |
|
RU2057979C1 |
| Устройство для передачи вращения в вакуумный объем | 1985 |
|
SU1359536A1 |
| Герметичный ввод | 1979 |
|
SU796594A1 |
| СПОСОБ СВЯЗИ И УСТРОЙСТВО СВЯЗИ | 2020 |
|
RU2801116C2 |
| US 2906143 А, 29.09.1959 | |||
| Устройство для передачи вращения от вала привода к приводному валу | 1989 |
|
SU1740839A1 |
| ТОРЦОВОЕ УПЛОТНЕНИЕ | 1977 |
|
SU698356A1 |

