Изобретение относится к автоматизации и механизации технологических процессов и может быть использовано при разработке автоматических сборочных устройств для групповой сборки резьбовых и цилиндрических деталей.
Известен вибрационный гайковерт (А.с. №933438, кл. В 25 В 21/00, 1982 г.), содержащий корпус, размещенные в нем привод, кинематически через ряд механизмов связанный со шпинделем, возбудитель поворотных колебаний, приводной вал которого жестко соединен со шпинделем, дифференциальную передачу, водило которой кинематически связано с корпусом и с приводным валом возбудителя колебаний, двухступенчатую зубчатую передачу, поводок в виде планки, жестко закрепленной на валу центрального колеса дифференциальной передачи, где корпус возбудителя и водило посредством двухступенчатой зубчатой передачи связаны между собой.
Недостатками данного устройства являются невозможность обеспечения нормированного крутящего момента, низкая точность затяжки и возможность использования только для завинчивания одиночных резьбовых деталей.
Наиболее близким по технической сущности к предлагаемому изобретению является импульсный гайковерт (А.с. №1586903, кл. В 25 В 21/00, 1990 г.), в корпусе которого размещен двигатель, вал которого кинематически связан со шпинделем, который с одной стороны через дифференциальный механизм и зубчатые колеса связан с выходными валами, снабженными головкой под ключ для завинчивания, а с другой стороны с механизмом импульсатора, внутренней обоймой муфты свободного хода, установленной на шпинделе с возможностью вращения, наружная обойма которой закреплена в корпусе. Импульсатор включает закрепленную на шпинделе втулку с фланцами на торцах, равномерно расположенные по окружности между фланцами втулки упругие элементы кручения, соединенные одним концом с внутренней обоймой муфты свободного хода, другим - с втулкой, механизм прерывистого движения, включающий в себя закрепленное на шпинделе зубчатое колесо, установленную с возможностью вращения на шпинделе и кинематически связанную с выходным валом двигателя через рядную зубчатую передачу обойму. Обойма имеет на внутренней поверхности кулачки. Кроме этого, импульсатор включает эксцентрично установленный с возможностью поворота на торце внутренней обоймы муфты свободного хода двуплечий рычаг, имеющий на одном конце зубчатый сектор для взаимодействия с зубчатым колесом, а на другом - подшипник для взаимодействия с кулачками обоймы.
Недостатком данного устройства является низкая точность и стабильность осевых сил затяжки в каждом групповом резьбовом соединении из-за невозможности обеспечения их синхронной затяжки после ввинчивания резьбовых деталей.
Задачами, решаемыми изобретением, являются повышение точности и стабильности осевых сил затяжки в групповых соединениях.
Это достигается тем, что многошпиндельный гайковерт, содержащий корпус, размещенные в нем двигатель, соединенную с ним муфту с обоймами, механизм прерывистого движения и два шпинделя с головками, снабжен планетарным редуктором, вторым механизмом прерывистого движения, дифференциальным механизмом и двумя редукторами. Один из редукторов кинематически связан с первым шпинделем и первым механизмом прерывистого движения, а второй - со вторым шпинделем и вторым механизмом прерывистого движения. Планетарный редуктор установлен между двигателем и механизмами прерывистого движения. Первый механизм прерывистого движения соединен с первым шпинделем и планетарным редуктором. Второй механизм прерывистого движения связан со вторым шпинделем и планетарным редуктором. Дифференциальный механизм кинематически связан с первым и вторым механизмами прерывистого движения и первым и вторым шпинделями. Одна из обойм муфты закреплена на входном валу. Вторая обойма установлена с возможностью возвратно-поступательного движения на выходном валу, кинематически связанном с дифференциальным механизмом.
Введение в кинематической схеме многошпиндельного гайковерта планетарного редуктора, второго механизма прерывистого движения, дифференциального механизма, двух редукторов позволяет создать в гайковерте две ветви вращения - "быструю", но маломоментную (резьбовая деталь завинчивается с большой угловой скоростью) и "медленную", с большим крутящим моментом (резьбовая деталь завинчивается с малой угловой скоростью, но с большим моментом завинчивания), т.е. при нормальном процессе завинчивания происходит "быстрое" вращение шпинделей, но когда момент сопротивления завинчиванию на одном из шпинделей резко возрастет, механизм прерывистого движения и дифференциальный механизм обеспечивают автоматический переход от маломоментного к высокомоментному вращению, что обеспечивает дальнейшее завинчивание обеих резьбовых деталей: одной с большим крутящим моментом, но малой угловой скоростью для преодоления сопротивления, а другой с малым крутящим моментом, но с большой угловой скоростью, при этом как только моменты сопротивлений на обоих шпинделях будут равны, механизм прерывистого движения и дифференциальный механизм обеспечивают автоматический переход от высокомоментного к маломоментному вращению, при этом периодически при изменениях момента сопротивления система механизмов будет переключать вращение с малой на большую угловую скорость и наоборот, что позволяет создать стабильность и высокую точность осевых сил затяжки (с погрешностью не более 1...1,5% от заданного момента затяжки) в резьбовых соединениях по сравнению с прототипом.
Многошпиндельный гайковерт (см. чертеж) содержит двигатель 1, который через зубчатую пару 2 связан с ведущей обоймой муфты предельного момента 3, ведомая обойма которой жестко соединена с валом 4. На другом конце вала 4 закреплена шестерня 5, которая через колесо 6 связана с водилом 7 дифференциального механизма 8. На оси перпендикулярной оси водила 7 расположена ось сателлитов, взаимодействующих с зубчатыми колесами 9 и 10, которые жестко связаны с шестернями соответственно 11 и 12. Шестерни 11 и 12 находятся в зацеплении с колесами соответственно 13 и 14, жестко сидящими на валах соответственно 15 и 16, кинематически через редукторы соответственно 17 и 18 связанных со шпинделями соответственно 19 и 20, имеющими головку 21, выполненную в виде патрона.
Двигатель 1 через планетарный редуктор 22 связан с зубчатой шестерней 23, которая находится в зацеплении с колесами 24 и 25, с которыми жестко связаны ведущие обоймы механизмов прерывистого движения соответственно 26 и 27 храпового типа с расположенными на них подпружиненными собачками, а ведомые обоймы механизмов прерывистого движения 26 и 27 жестко насажены соответственно на валы 15 и 16.
Для формирования электрических импульсов служит электрический контакт 28, расположенный вблизи муфты 3 при ее "прощелкивании - проскальзывании", а для их считывания служит счетчик 29, связанный с реле 30 в цепи питания двигателя многошпиндельного гайковерта.
Многошпиндельный гайковерт работает следующим образом.
При включении двигателя 1 на шпиндель 20 передается "быстрое" вращение с малым крутящим моментом по цепи: зубчатая пара 2, муфта предельного момента 3, шестерня 5, колесо 6, дифференциальный механизм 8, шестерня 12, колесо 14, вал 16, редуктор 18, шпиндель 20 с патроном 21, а на шпиндель 19 по цепи: зубчатая пара 2, муфта предельного момента 3, шестерня 5, колесо 6, дифференциальный механизм 8, шестерня 11, колесо 13, вал 15, редуктор 17, шпиндель 19 с патроном 21.
При одновременном вращении колес 24, 25 и соответственно 13, 14, учитывая, что колеса 24, 25 вращаются медленнее колес 13, 14, механизмы прерывистого движения 26 и 27 совершают свободный ход не передавая вращение соответственно валам 15 и 16, так как собачки на ведущих обоймах механизмов прерывистого движения соответственно 26 и 27 отстают по частоте вращения от храповых колес на ведомых обоймах и не могут вступить во взаимодействие с зубом храповых колес для передачи вращения (собачка прощелкивает - проскальзывает). Следовательно, цепь передачи "медленного" вращения разрывается на механизмах прерывистого движения 26, 27.
При остановке вращения, например, колеса 14 за счет свойств дифференциального механизма 8 "неодинакового" момента сопротивления на выходных осях дифференциального механизма 8 останавливается вращение храпового колеса ведомой обоймы механизма прерывистого движения 27. Собачка на ведущей обойме входит во взаимодействие с зубом храпового колеса ведомой обоймы механизма прерывистого движения 27 и начинает передаваться "медленное" вращение с большим крутящим моментом.
До тех пор, пока суммарный момент сопротивления на валу 4 будет меньше момента, на который настроена муфта предельного момента 3, "быстрое" вращение от двигателя 1 передается по следующей цепи: зубчатая пара 2, муфта предельного момента 3, шестерня 5, зубчатое колесо 6, дифференциальный механизм 8, шестерни 11 и 12, колеса соответственно 13 и 14, редукторы соответственно 17 и 18, шпиндели соответственно 19 и 20 с патронами 21. За счет свойств дифференциального механизма "быстрое" вращение будет иметь тот патрон 21, сопротивление вращения на котором в данный момент меньше. При этом механизм прерывистого движения этого шпинделя совершает свободный ход. Второй патрон 21, сопротивление на котором в данное мгновение больше, будет иметь "медленное" вращение, т.к. сработает и будет передавать вращение механизм прерывистого движения с большим крутящим моментом, например, по цепи: планетарный редуктор 22, шестерня 23, зубчатое колесо 24, механизм прерывистого движения 26, редуктор 17, шпиндель 19 с патроном 21. Далее величины моментов сопротивления на шпинделях 19 и 20 могут поменяться и, следовательно, изменятся скорости их вращения. Если моменты сопротивления в патронах 21 будут практически равными, шпиндели 19, 20 с патронами 21 будут совершать "быстрое" вращение и т.д.
При достижении суммарного момента сопротивления вращению на валу 4 большего значения, чем момент, на который настроена муфта предельного момента 3, ее полумуфты начинают проскальзывать. "Быстрое" вращение передаваться не будет, а шпиндели 19, 20 с патронами 21 будут вращаться с "медленной" угловой скоростью, но синхронно, обеспечивая их одинаковый поворот, получая движение от двигателя 1 через планетарный редуктор 22, соответственно зубчатую пару шестерни 23 и колеса 24 и зубчатую пару шестерни 23 и колеса 25, механизмы прерывистого движения 26, 27.
Поворот патронов 21 на одинаковый заданный угол обеспечивается системой отсчета, которая при "прощелкивании" (проскальзывании полумуфт) зубчатой муфты предельного момента 3 передает замыканиями и размыканиями контакта 28 электрические сигналы на счетчик импульсов 29 и при достижении заданного числа импульсов, соответствующего требуемому углу затяжки резьбовых деталей, посредством реле 30 отключает питание двигателя 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2012 |
|
RU2508978C2 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2007 |
|
RU2345880C1 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2007 |
|
RU2360784C2 |
| ИНЕРЦИОННЫЙ ГАЙКОВЕРТ | 2013 |
|
RU2535835C2 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ ДЛЯ ЗАВИНЧИВАНИЯ ШПИЛЕК С УГЛОВЫМ РАССОГЛАСОВАНИЕМ ОСЕЙ | 2012 |
|
RU2516251C1 |
| ГАЙКОВЕРТ | 2011 |
|
RU2473417C1 |
| УДАРНЫЙ ГАЙКОВЕРТ | 2011 |
|
RU2480323C2 |
| Многошпиндельный гайковерт | 1990 |
|
SU1727982A1 |
| ВИБРАЦИОННЫЙ ГАЙКОВЕРТ | 1998 |
|
RU2182533C2 |
| Гайковерт | 1978 |
|
SU753628A1 |
Изобретение относится к области машиностроения. Многошпиндельный гайковерт содержит корпус, размещенные в нем двигатель, соединенную с ним муфту с обоймами, механизм прерывистого движения и два шпинделя с головками. Гайковерт снабжен планетарным редуктором, установленным между двигателем и механизмом прерывистого движения, вторым механизмом прерывистого движения, связанным со вторым шпинделем и планетарным редуктором, дифференциальным механизмом, кинематически связанным с первым и вторым механизмами прерывистого движения и первым и вторым шпинделями, и двумя редукторами, один из которых кинематически связан с первым шпинделем и первым механизмом прерывистого движения, а второй - со вторым шпинделем и вторым механизмом прерывистого движения. Первый механизм прерывистого движения соединен с первым шпинделем и планетарным редуктором. Одна из обойм муфты закреплена на входном валу, а вторая - установлена с возможностью возвратно-поступательного движения на выходном валу, кинематически связанном с дифференциальным механизмом. При использовании изобретения повышается точность и стабильность осевых сил затяжки в групповых соединениях. 1 ил.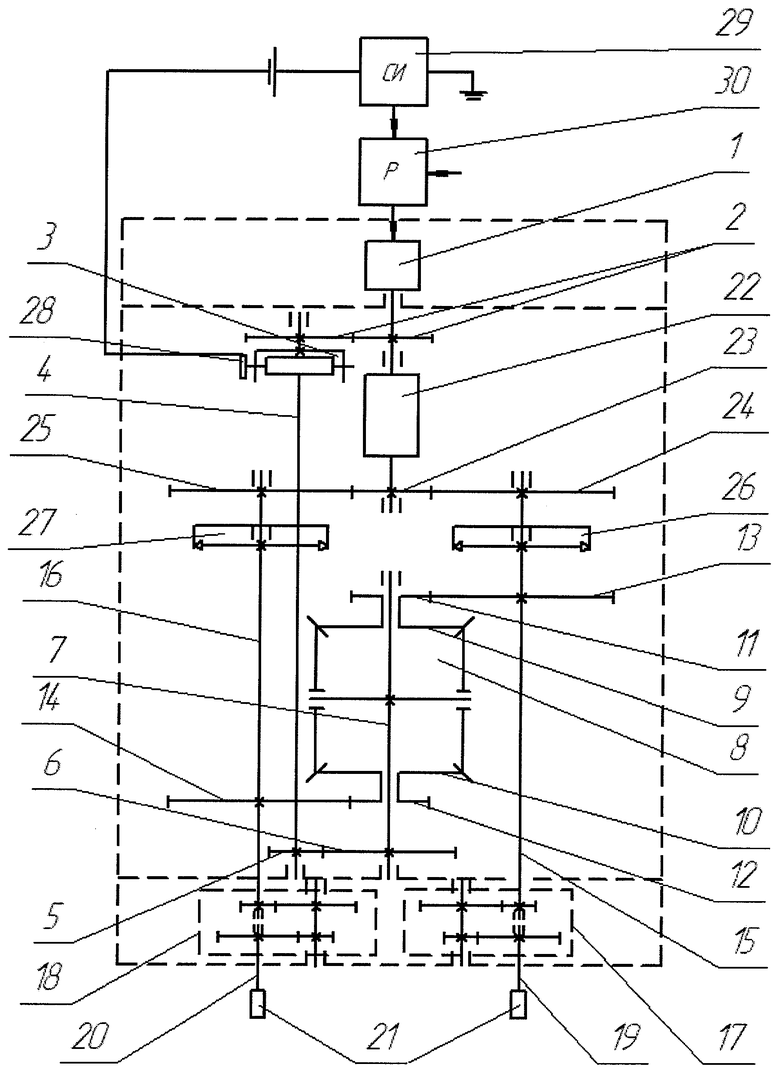
Многошпиндельный гайковерт, содержащий корпус, размещенные в нем двигатель, соединенную с ним муфту с обоймами, механизм прерывистого движения и два шпинделя с головками, отличающийся тем, что он снабжен планетарным редуктором, установленным между двигателем и механизмом прерывистого движения, вторым механизмом прерывистого движения, связанным со вторым шпинделем и планетарным редуктором, дифференциальным механизмом, кинематически связанным с первым и вторым механизмами прерывистого движения и первым и вторым шпинделями, и двумя редукторами, один из которых кинематически связан с первым шпинделем и первым механизмом прерывистого движения, а второй - со вторым шпинделем и вторым механизмом прерывистого движения, при этом первый механизм прерывистого движения соединен с первым шпинделем и планетарным редуктором, а одна из обойм муфты закреплена на входном валу, а вторая установлена с возможностью возвратно-поступательного движения на выходном валу, кинематически связанном с дифференциальным механизмом.
| Импульсный гайковерт | 1988 |
|
SU1586903A1 |
| Многошпиндельный гайковерт | 1986 |
|
SU1380929A1 |
| МЕХАНИЧЕСКАЯ ОТВЕРТКА | 1991 |
|
RU2009867C1 |
| DE 3529992 А, 26.02.1987 | |||
| JP 7040257 A, 10.02.1995 | |||
| Устройство для контроля и учета работы оборудования | 1983 |
|
SU1103270A1 |

