Изобретение относится к ветроэнергетике и способствует освоению экологически чистых способов получения энергии.
Известен ветродвигатель, в котором реализуется способ автоматического управления крылом с вертикальной осью вращения с крыльями симметричного профиля, закрепленными на радиальных траверсах шарнирно, при этом оси шарнира смещены по хорде крыла в сторону его носка (см., например, RU 2235901 С2, кл. F03D 3/00, 10.09.2004, 6 стр.), по совокупности существенных признаков принятый за ближайший аналог изобретения (прототип).
К недостаткам прототипа относятся сложность конструкции и способность крыла эффективно работать только на наветренной стороне.
Технический результат заключается в обеспечении такого способа автоматического управления крылом, который обеспечивает эффективную тягу крыла на всей ометаемой им окружности, а также в упрощении конструкции.
Способ автоматического управления крылом ветродвигателя с вертикальной осью вращения с крыльями симметричного профиля, закрепленными на радиальных траверсах шарнирно, заключающийся в механическом ограничении угла их поворота и смещении оси шарнира по хорде крыла в сторону его носка, причем центр тяжести крыла смещают на перпендикуляр к хорде крыла, проходящей через ось шарнира на внешнюю от центра вращения ротора сторону.
Для оценки возможностей любого ветродвигателя мощность ветра можно представить формулой

где S - площадь потока ветра;
ρ - плотность воздуха;
Vв - скорость ветра.
Плотность воздуха при 0°С и давлении 760 мм рт.ст. равна 1.293 кг/м3. Мощность потока ветра, проходящего через 1 квадратный метр поверхности, будет

От того, какую часть этой энергии может забрать ветродвигатель, зависит его эффективность.
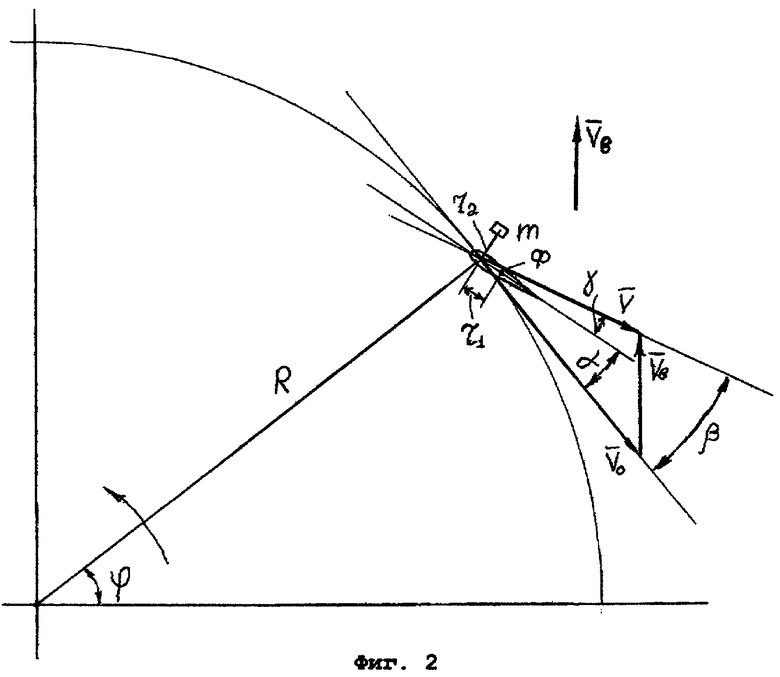
Рассмотрим, в каких условиях находится крыло, двигающееся по окружности (см. фиг.2). Для скоростного ветродвигателя окружная скорость V0 значительно больше скорости ветра Vв. Скорость V потока ветра, действующая на крыло, будет суммой вектора ветра Vв и окружной скорости V0, а β - угол между касательной к окружности и действующим ветром. При движении крыла по окружности будут изменяться угол β и модуль скорости действующего ветра V. Заменяя действующую скорость ее относительным значением


получим

где γ - угол положения крыла на окружности;
n - отношение окружной скорости к скорости ветра;
Vн - отношение действующей скорости к скорости ветра.
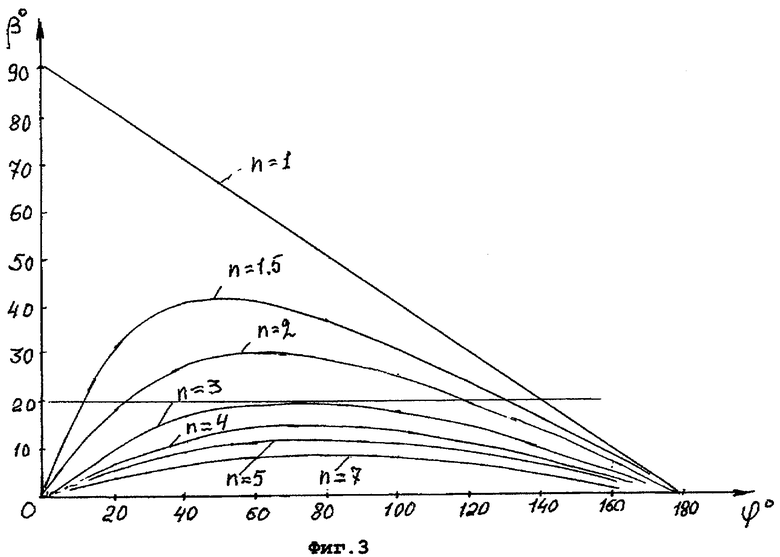
На графиках (см. фиг.3) показано, что при n больше единицы крыло работает с острыми углами действующего ветра. Для обеспечения положительной тяги крыла вдоль окружности угол α должен быть больше нуля и меньше угла ветра β. Естественно, что в этом интервале будет и оптимальное значение угла α. Ограничение поворота крыла в пределах 20 градусов обеспечивает самостоятельный разгон ветродвигателя, так как будет выполняться приведенное выше условие на большей части окружности.
По мере разгона ветродвигателя механические упоры перестанут действовать, так как угол α при n=2 будет меньше 20 градусов.
Если принять, что подъемная сила крыла F является линейной функцией угла атаки

то нетрудно получить оптимальное значение угла поворота крыла

где α - угол между хордой крыла и касательной к окружности.
Как пример возможного использования предлагаемого способа автоматического управления крылом на фиг.1 изображен ветродвигатель с вертикальной осью вращения, где приняты следующие обозначения:
1 - вал ротора ветродвигателя;
2 - профилированные крылья;
3, 4- радиальные траверсы;
5 - пластины с вырезами, ограничивающими угол поворота крыла;
6 - грузик, смещающий центр тяжести крыла;
7 - штифт, ограничивающий поворот пластины;
8 - подшипник шарнира крыла;
Ф - фокус крыла.
На ступицах вертикального вала 1 закреплены радиальные траверсы 3, 4, которые вместе с крыльями 2, вращающимися в шарнирах 8, образуют ротор. Штифт 7, находящийся в вырезах пластины 5, ограничивает поворот крыла. Грузик 6 обеспечивает смещение центра тяжести крыла 2.
В предлагаемом способе автоматического управления крылом смещение оси шарнира к носику крыла обеспечивает момент, стремящийся поставить крыло во флюгерное состояние. В то же время, смещение центра тяжести от центра вращения за крыло центробежной силой стремится поставить крыло вдоль касательной к окружности. Этот момент представлен формулой (7)

где R - радиус окружности ротора,
m - действующая масса смещения;
V0 - линейная скорость крыла,
α - угол между хордой крыла и касательной к окружности;
r2 - расстояние между центром тяжести и осью шарнира.
Флюгерный момент равен

где r1 - расстояние от фокуса крыла до оси шарнира;
Fп - подъемная сила крыла.
В аэродинамике крыло характеризуется подъемной силой и лобовым сопротивлением
где S - площадь крыла;
ρ - плотность воздуха;
V - скорость воздуха;
Сy - аэродинамический коэффициент подъемной силы;
Сх - аэродинамический коэффициент лобового сопротивления;
Fл - лобовое сопротивление.
Коэффициенты Сy и Сх зависят от профиля крыла и угла атаки.
Обычно коэффициенты Сy и Сх по результатам продувки задаются таблично как функции угла атаки.
Флюгерный и центробежный моменты направлены навстречу друг другу, тогда можно получить уравнение

Выразив скорости через соотношение
V=Vн·Vв, V0=n·Vв,
получим

Коэффициенты Сy и Сх являются функцией углов β и α. Относительная скорость Vн и угол β зависят от n и положения крыла на окружности ϕ.
Уравнение (11) является трансцендентным и решается численным методом относительно угла α. В реальном устройстве угол α устанавливается автоматически при равенстве центробежного и аэродинамического моментов.
Зная угол α, нетрудно получить полезную силу, действующую вдоль окружности

Мгновенная мощность будет

Среднюю мощность можно представить

где К - количество измерений на окружности с шагом Δϕ,
Рi - значение мгновенной мощности.
Для подтверждения эффективности предлагаемого способа автоматического управления крылом было проведено математическое моделирование.
В качестве исходных параметров было принято крыло площадью в один квадратный диаметр с профилем NACA 0009, радиусом ротора R=0,5 м. Смещение шарнира относительно фокуса r1=5 см. Смещение центра тяжести r2=5 см. Масса грузика смещения центра тяжести варьировалась от 5 грамм до 20 грамм. Функции коэффициентов Сy и Сх от угла атаки заданы таблично. В таблице 1 для массы грузика 10 приведены расчетные значения углов β, α и относительной скорости Vн в зависимости от параметра n и угла положения крыла на окружности (формулы 3, 4, 11). В таблице 2 приведены расчетные значения мгновенной мощности (формула 13) для углов α из таблицы 1 для массы грузика m=10 г и Р0 для оптимального угла

(формула 6),
при скорости ветра Vв=10 м/с. В нижней строке таблицы 2 приведены средние значения соответствующих мощностей (формула 14). На графиках фиг.4 показаны зависимости средней мощности от параметра n и массы грузиков смещения центра тяжести. Приведен также график мощности для крыла, управляемого по закону
.
Как видно на этих графиках, максимальная мощность достигается при отношении окружной скорости крыла к скорости ветра n≈5. Сравнивая значение средней мощности предлагаемого способа управления крылом со средней мощностью управления по закону αопт, можно сделать вывод о высокой эффективности предлагаемого способа. Ошибки в выборе массы горузиков смещения центра тяжести не критичны.
Результаты математического моделирования позволяют сделать вывод о высокой эффективности предлагаемого способа автоматического управления крылом. Можно ожидать эффективности в десятки процентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ВЕТРОЭНЕРГЕТИЧЕСКИЙ | 2007 |
|
RU2340789C1 |
| РОТОР ВЕТРОДВИГАТЕЛЯ | 1998 |
|
RU2136960C1 |
| АЭРОГИДРОДИНАМИЧЕСКИЙ ДВИГАТЕЛЬ КАРПУШКИНА | 2006 |
|
RU2320890C1 |
| КРЫЛО (ЛОПАСТЬ) С САМОУСТАНОВКОЙ УГЛА АТАКИ К НАПРАВЛЕНИЮ НАБЕГАЮЩЕГО ПОТОКА СРЕДЫ | 1998 |
|
RU2141059C1 |
| РОТОРНЫЙ ВЕТРОПРИВОД | 2010 |
|
RU2471085C2 |
| РОТОР ВЕРТИКАЛЬНО-ОСЕВОГО ВЕТРОДВИГАТЕЛЯ | 1997 |
|
RU2122650C1 |
| РОТОР ВЕТРОДВИГАТЕЛЯ | 1997 |
|
RU2116502C1 |
| ЛОПАСТЬ-ПАРУС ВЕТРЯНОГО АГРЕГАТА (ВАЮ) | 1997 |
|
RU2131996C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ВОЗДУШНОГО ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ПЛОСКОЙ ЛОПАСТИ | 2016 |
|
RU2664639C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛОПАСТЯМИ РОТОРА ВЕТРЯКА С ВЕРТИКАЛЬНОЙ ОСЬЮ ВРАЩЕНИЯ | 2012 |
|
RU2525998C2 |
Изобретение относится к ветроэнергетике и способствует освоению экологически чистых способов получения энергии. Способ автоматического управления крылом ветродвигателя с вертикальной осью вращения с крыльями симметричного профиля, закрепленными на радиальных траверсах шарнирно, заключается в механическом ограничении угла их поворота и смещении оси шарнира по хорде крыла в сторону его носка, причем центр тяжести крыла смещают на перпендикуляр к хорде крыла, проходящий через ось шарнира на внешнюю от центра вращения ротора сторону. Для обеспечения самостоятельного разгона ветродвигателя угол поворота крыла на оси шарниров ограничен. Достоинством предлагаемого способа автоматического управления крылом ветродвигателя является отсутствие сложных механических устройств и его высокая эффективность. Предлагаемый способ автоматического управления крылом позволяет как упростить конструкцию ветродвигателя, так и уменьшить стоимость его производства. 2 табл., 4 ил.
Способ автоматического управления крылом ветродвигателя с вертикальной осью вращения с крыльями симметричного профиля, закрепленными на радиальных траверсах шарнирно, заключающийся в механическом ограничении угла их поворота и смещении оси шарнира по хорде крыла в сторону его носка, причем центр тяжести крыла смещают на перпендикуляр к хорде крыла, проходящий через ось шарнира на внешнюю от центра вращения ротора сторону.
| ВЕТРОДВИГАТЕЛЬ | 2001 |
|
RU2235901C2 |
| Ротор ветродвигателя | 1989 |
|
SU1645602A1 |
| Рабочее колесо карусельного ветродвигателя | 1983 |
|
SU1134772A1 |
| Ветроколесо с вертикальным валом | 1984 |
|
SU1236149A1 |
| РОТОР ВЕТРОДВИГАТЕЛЯ | 1993 |
|
RU2044922C1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| УСТРОЙСТВО ДЛЯ БЕСТРАНШЕЙНОЙ ЗАМЕНЫ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2003 |
|
RU2249143C1 |

