Настоящее изобретение относится, в общем, к системе плунжерного подъемника и способу добычи текучих сред с использованием этой системы.
Для добычи углеводородов из подземного пластового резервуара один или несколько стволов скважины бурятся через пласт к резервуару. Каждый ствол скважины затем полностью комплектуется посредством установки обсадной колонны или хвостовиков и посредством установки насосно-компрессорных труб, пакеров и других компонентов забоев скважин. Для определенных типов буровых скважин системы насосно-компрессорной добычи устанавливаются для увеличения добычи углеводородов. Одна такая система насосно-компрессорной добычи включает электрический погружной насос, который выкачивает текучие среды из забоя в стволе скважины на поверхность скважины. Другим типом системы насосно-компрессорной добычи является газлифтная система, в которой газ под давлением (выкачиваемый с поверхности скважины или из соседнего ствола скважины) используется для поднятия текучих сред скважины из забоя в стволе скважины.
Еще одним типом системы насосно-компрессорной добычи является система добычи с помощью плунжерного подъемника, часто используемого для извлечения нефти и/или других текучих сред из газовых скважин. Газовые скважины, которые требуют свабирования, мыловки, продувки или регулирования давления газа в скважине, могут использовать системы добычи с помощью плунжерного подъемника. Механизм добычи с помощью плунжерного подъемника типично включает относительно небольшой цилиндрический плунжер, который перемещается по насосно-компрессорным трубам, проходящим от забоя скважины рядом с рабочим пластовым резервуаром к наземному оборудованию, размещенному у открытого конца ствола скважины. (US 4802359 A, 07.02.1989)
В общем, жидкости, которые скапливаются в стволе скважины и задерживают поток газа, выходящий из пластового резервуара и проходящий в ствол скважины, собираются в насосно-компрессорной трубе. Периодически конец насосно-компрессорной трубы открывается на поверхности и накопленного давления пластового резервуара оказывается достаточно для поднятия плунжера по насосно-компрессорной трубе. Плунжер переносит с собой к поверхности текучие среды, которые выбрасываются из верха скважины для обеспечения возможности газу более свободно протекать из пластового резервуара в ствол скважины и в распределительную систему на поверхности скважины.
После того как поток газа снова стал дросселированным вследствие дополнительного накопления текучих сред в забое скважины, клапан в насосно-компрессорной трубе на поверхности скважины закрывается, так что плунжер спускается обратно вниз по насосно-компрессорной трубе для подъема еще одной порции текучих сред к поверхности скважины после повторного открытия клапана. В системах добычи с помощью плунжерного подъемника существует требование в периодическом приведении в действие клапана с приводом в устье скважины, чтобы контролировать поток текучих сред из скважины и способствовать добыче газа и жидкостей из скважины. Традиционно клапан с приводом управляется временным устройством, которое запрограммировано в соответствии с принципами разработки нефтяных и газовых месторождений для определения промежутка времени, в течение которого скважина должна либо быть "закрытой" (и ограниченной от течения), и время, когда скважина должна быть "открытой" для обеспечения добычи. В целом, критерий, используемый для приведения в действие задвижки с приводом, строго основывается на заранее выбранном периоде времени. В большинстве случаев такие параметры, как давление, температура скважины и т.д., недоступны в традиционных системах добычи с помощью плунжерного механизма из-за затрат, связанных с вмешательством для получения давления, температуры скважины и другой информации.
Приведение в действие клапана с приводом на основе только времени зачастую недостаточно для управления выходом из скважины с целью улучшения продукции скважины. Надлежащее логическое устройство для управления системами добычи с помощью плунжерных подъемников обычно основано на методе проб и ошибок, с непрерывной оценкой, требуемой для изменения поведения скважины, что делает неизбежным рейсы на буровую площадку для корректировки согласования по времени для управления клапанами с приводом.
Согласно изобретению создана система плунжерного подъемника, содержащая оборудование устья скважины, содержащее приемное устройство, трубу, проходящую от оборудования устья скважины в ствол скважины, плунжер, способный перемещаться по трубе к забою в скважине, включающий, по меньшей мере, датчик для измерения параметра забоя скважины и приспособленный передавать измеренный параметр забоя скважины приемному устройству.
Система может дополнительно содержать контроллер и клапан, управляемый контроллером, при этом контроллер способен принимать данные, измеренные датчиком плунжера, и управлять клапаном, по меньшей мере, частично на основе данных, измеренных датчиком плунжера.
Контроллер может быть частью оборудования устья скважины, осуществление действий с клапаном контроллером управляет подъемом и опусканием плунжера в трубе.
Плунжер может подниматься и автономно опускаться в трубе на основе измеренного параметра забоя скважины.
Плунжер может содержать газ под давлением, который выпускается в ответ на измеренный параметр забоя скважины для осуществления перемещения плунжера.
Контроллер может дополнительно управлять клапаном на основе временного критерия синхронизации.
Система может дополнительно содержать электрический канал связи между приемным устройством и контроллером.
Плунжер может включать первое беспроводное телеметрическое устройство, и приемное устройство включает второе беспроводное телеметрическое устройство, при этом первое и второе телеметрические устройства сообщаются беспроводным способом для обеспечения передачи данных, измеренных датчиком, в приемное устройство.
Первое и второе телеметрические устройства могут содержать электромагнитные беспроводные телеметрические устройства или радиочастотные телеметрические устройства или индуктивные телеметрические устройства, или телеметрические устройства, импульсов давления для передачи данных посредством импульсов давления, или инфракрасные телеметрические устройства.
Контроллер может включать временное логическое устройство и способен управлять клапаном на основе логического устройства и данных, измеренных датчиком плунжера.
Датчик может быть адаптирован для измерения параметра забоя скважины, которым является, по меньшей мере, давление или температура в интервале ствола скважины.
Датчик может быть приспособлен измерять параметр забоя скважины, которым является, по меньшей мере, скорость движения текучих сред или плотность текучих сред, или пластовое давление, или удельное сопротивление пласта.
Плунжер может включать источник питания для обеспечения питанием датчика.
Источник питания может заряжаться приемным устройством в ответ на активацию плунжера в приемном устройстве.
Плунжер может включать первый электрический разъем, и приемное устройство включает второй электрический разъем, при этом первый и второй электрические разъемы способны соединяться друг с другом для обеспечения электрической связи между датчиком и приемным устройством.
Система может дополнительно содержать контроллер для приема измеренного параметра забоя скважины от датчика посредством приемного устройства, способный передавать данные по сети удаленному узлу для передачи измеренного параметра забоя скважины удаленному узлу по сети.
Система может дополнительно содержать контроллер для управления работой плунжера на основе измеренного параметра забоя скважины, способный перемещать плунжер между положением в оборудовании устья скважины и в забое скважины.
Система может дополнительно содержать клапан, приводимый в действие контроллером, причем открытие и закрытие клапана вызывает перемещение плунжера в обсадной трубе.
Согласно изобретению создан способ насосно-компрессорной добычи текучих сред из ствола скважины, содержащий следующие этапы:
спуск плунжера системы плунжерного подъемника посредством трубы в стволе скважины
обеспечение плунжера, по меньшей мере, датчиком
обеспечение оборудования устья скважины приемным устройством; и
передача измеренного параметра забоя скважины от датчика приемному устройству.
Передача измеренного параметра забоя скважины от датчика к приемному устройству может осуществляться беспроводной передачей данных между телеметрическим устройством в плунжере и телеметрическим устройством в приемном устройстве.
Способ может дополнительно содержать измерение параметра забоя скважины с помощью датчика при размещении плунжера в забое скважины, при этом параметром является, по меньшей мере, один из следующих параметров: температура, давление, скорость движения текучих сред, плотность текучих сред, пластовое давление, удельное сопротивление пласта.
Способ может дополнительно содержать зарядку источника питания в плунжере, когда плунжер активируется с помощью приемного устройства.
Передача измеренного параметра забоя скважины от датчика приемному устройству может выполняться при активизации плунжера с помощью приемного устройства.
Способ может дополнительно содержать этап передачи измеренного параметра забоя скважины контроллеру.
Способ может дополнительно содержать оценку контроллером ствола скважины на основе измеренного параметра забоя скважины.
Способ может дополнительно содержать использование клапана в оборудовании устья скважины для управления перемещением плунжера и открытие и закрытие посредством контроллера клапана на основе, по меньшей мере, частично, измеренного параметра забоя скважины.
Открытие контроллером клапана может осуществляться дополнительно на основе критерия синхронизации.
В другом варианте система плунжерного подъемника содержит оборудование устья скважины, содержащее приемное устройство, трубу, проходящую от оборудования устья скважины в ствол скважины, датчик для определения местоположения забоя скважины в стволе скважины и плунжер, перемещаемый в трубе между оборудованием устья скважины и местом вблизи датчика, и принимающий параметр забоя скважины, измеренный датчиком, причем плунжер имеет запоминающее устройство для сохранения принятого параметра забоя скважины и передает сохраненный параметр забоя скважины приемному устройству.
Далее изобретение более подробно описано со ссылками на чертежи, на которых изображено следующее.
Фиг.1 иллюстрирует оборудование скважины, которое включает систему добычи с помощью плунжерного подъемника согласно варианту осуществления.
Фиг.2-6 иллюстрируют пример работы системы добычи с помощью плунжерного подъемника согласно варианту осуществления.
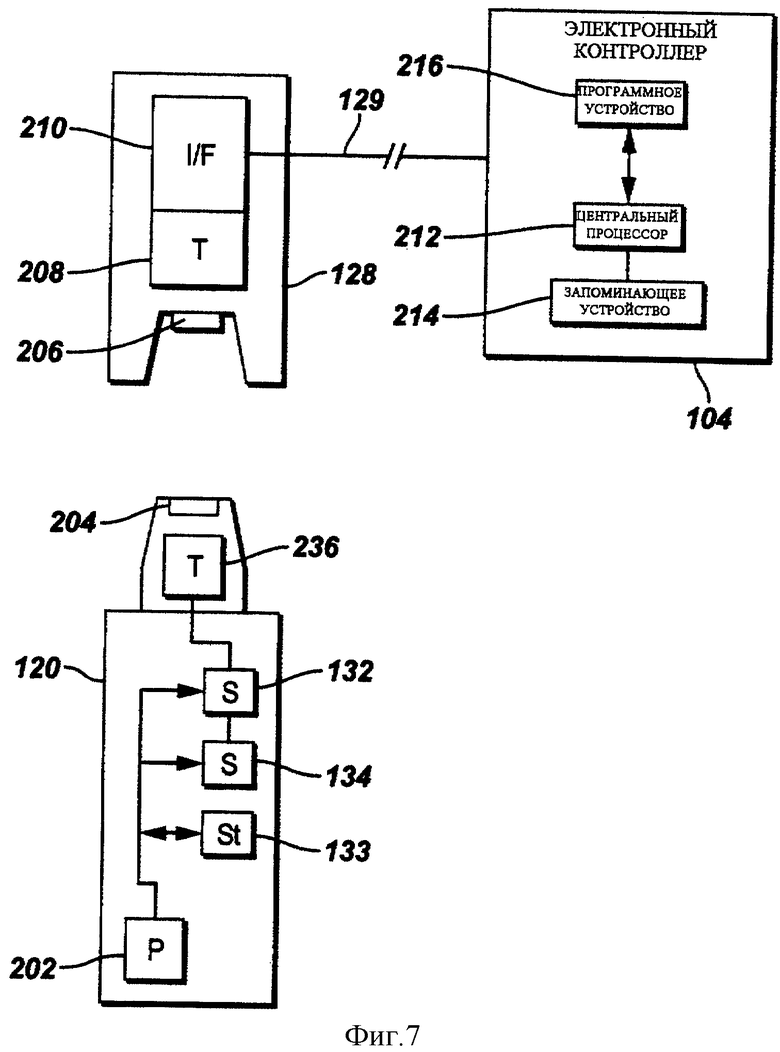
Фиг.7 иллюстрирует блок-схему компонентов плунжера и приемного устройства в системе добычи с помощью плунжерного подъемника фиг.1.
В последующем описании изложены многие детали для обеспечения понимания настоящего изобретения. Тем не менее, специалисты в данной области техники должны понимать, что настоящее изобретение может быть применено на практике без этих деталей и что возможно множество вариантов или модификаций описанных вариантов.
При использовании здесь терминов "вверх" и "вниз"; "верхний" и "нижний"; "вверху" и "внизу"; "восходящий" и "нисходящий"; "выше" и "ниже" и других подобных терминов, указывающих относительное положение выше и ниже данной точки или элемента, применяются в данном описании, чтобы более понятно описать некоторые варианты осуществления изобретения. Тем не менее, при применении к оборудованию и способам для использования в скважинах, которые являются наклонными или горизонтальными, эти термины могут ссылаться на слева направо, справа налево или другое взаимоотношение, которое подходит.
Фиг.1 иллюстрирует оборудование скважины, которая включает систему 100 добычи с помощью плунжерного подъемника, оборудование 102 устья скважины, электронный контроллер 104 и клапан 106 с приводом. Ствол 108 скважины имеет обсадную колонну или хвостовик 110 с перфорациями 112, сформированными в интервале ствола скважины для сообщения текучих сред ствола скважины с окружающим пластом. Насосно-компрессорная труба 114 проходит от оборудования 102 к интервалу ствола скважины рядом с перфорированной областью обсадной колонны и пластом. Стопор 116 насосно-компрессорной трубы расположен в нижней части насосно-компрессорной трубы 114 и включает выпускной клапан. Над стопором 116 насосно-компрессорной трубы расположена амортизирующая пружина 118, которая используется для приема перемещающегося плунжера 120 (плунжера, который перемещается между забоем скважины и поверхностью скважины). Пружина 118 является пружиной, которая поглощает ударное воздействие, когда плунжер 120 опускается на пружину 118.
Оборудование 102 устья скважины включает смазочное устройство 122 и фонтанную задвижку 124 для закрытия ствола при вставке оборудования посредством смазочного устройства 122. Между фонтанной задвижкой 124 и смазочным устройством 122 расположен фиксатор 126. Фиксатор 126 включает приемное устройство 128 для приема плунжера 120. Приемное устройство в фиксаторе 126 обеспечивает как физическое (механическое), так и электрическое подключение к плунжеру 120. Электрическое подключение дает возможность электросвязи (по мощности и передаче сигналов) по кабелю 129 с электрическим контроллером 104. Помимо этого, приемное устройство 128 в фиксаторе 126 имеет телеметрический элемент для обеспечения проводной или беспроводной связи с плунжером 120. Беспроводная связь может включать электромагнитную, радиочастотную (RF), инфракрасную, индуктивную связь, связь по импульсу давления или другие формы беспроводной связи. Радиочастотная и индуктивная связь между приемным устройством 128 и плунжером 120 может быть наиболее эффективной.
Электронный контроллер 104 подключен по каналу связи 130 к клапану 106 с приводом. Электронный контроллер 104 контролирует клапан 106 с приводом для определения, когда клапан 106 должен быть открыт или закрыт. При открытии задвижки 106 она дает возможность потоку текучих сред скважины, например газу, вытекать из ствола скважины посредством трубы 136. Хотя указывается ссылкой как "клапан с приводом", другие типы клапанов или регуляторов потока могут быть использованы в других вариантах осуществления.
Согласно некоторым вариантам осуществления изобретения плунжер 120 включает один или несколько датчиков 132, 134, которые используются для измерения характеристик ствола скважины и окружающего пласта. При использовании здесь термина "плунжер" ссылается на любой передвижной элемент, который допускает перемещение через, по меньшей мере, часть ствола скважины. Датчики 132, 134 сообщаются посредством телеметрического элемента 136 и соответствующего телеметрического элемента в приемном устройстве 128 фиксатора 126. Как указывалось выше, указанное сообщение включает беспроводную или проводную связь. Измеренные характеристики передаются от датчиков 132, 134 посредством приемного устройства 128 электронному контроллеру 104.
Измеренными характеристиками являются давление, температура и другие характеристики скважины, такие как скорость движения текучих сред, плотность текучих сред, характеристики пласта, такие как пластовое давление, удельное сопротивление пласта и другие характеристики забоя скважины. Таким образом, датчики измеряют параметры забоя скважины. Использование датчиков 132, 134 обеспечивает возможность электронному контроллеру 104 определять, когда клапан 106 должен быть открыт или закрыт. Помимо временного критерия, запрограммированного в электронном контроллере 104, электронный контроллер 104 учитывает данные от датчиков 132, 134 для управления открытием и закрытием клапана 106. Датчики 132, 134 питаются от источника питания, например аккумуляторов.
Имея возможность отслеживать информацию о среде забоя скважины (информацию, касающуюся характеристик скважины, характеристик пласта или пластового резервуара и/или других параметров забоя скважины) с помощью датчиков 132, 134, электронный компонент 104 может автоматически регулировать систему добычи с помощью плунжерного подъемника, тем самым устраняя ручное вмешательство оператора скважины для определения того, когда клапан 106 должен быть открыт или закрыт. Следовательно, подходы "проб и ошибок" к управлению плунжерным подъемником могут быть исключены или сокращены. Например, клапан 106 может быть управляем для поднятия плунжера 120 или предоставления возможности плунжеру 120 опускаться обратно в ствол скважины в ответ на заранее заданные пороги давления, измеренные датчиком 132 или 134 в плунжере 120.
Помимо этого, электронный контроллер 104 сконфигурирован, чтобы передавать данные измерений (от датчиков 132, 134) по сети 140 (проводной и/или беспроводной сети) удаленному узлу 142. Электронный контроллер 104 также может передавать оперативную информацию, касающуюся работы механизма 100 добычи с помощью плунжерного подъемника, удаленному узлу 140.
Измеренные параметры забоя скважины также могут быть переданы удаленному узлу 142 или обработаны на буровой площадке, чтобы оценить пластовый резервуар и месторождение, связанные со стволом скважины. Например, измеренные параметры забоя скважины могут быть сравнены с данными наблюдений пластового резервуара или окружающих пластовых резервуаров. Датчики, предусмотренные в перемещающемся плунжере 120, дают возможность получения параметров забоя скважины без использования дорогой или очень сложной телеметрической системы. Интеграция датчиков 132, 134 в систему добычи с помощью плунжерного подъемника дает возможность мониторингу скважины быть предоставленным в качестве неотъемлемой части относительно недорогой системы добычи с помощью плунжерного подъемника без дополнительной инфраструктуры ствола скважины. Следовательно, административные и производственные издержки, связанные с контролем за продукцией скважины, могут быть снижены.
Альтернативно, телеметрический элемент 136 может сообщаться беспроводным способом с приемным устройством 128 (как устье скважины) из удаленного места, например, удаленного места в стволе скважины. Для обеспечения беспроводной связи на большие расстояния плунжер 120 может быть оснащен источником питания большей электрической емкости, например аккумулятором большой мощности.
В альтернативном варианте осуществления вместо использования датчика в плунжере датчик (или датчики) 135 могут быть размещены в стационарном месте забоя ствола скважины (например, рядом с амортизационной пружиной 118). В этом альтернативном варианте осуществления перемещающийся плунжер выступает в качестве телеметрического устройства для передачи информации от стационарного датчика 135 забоя приемному устройству 128 на поверхности. Перемещающийся плунжер может передавать информацию из стационарного датчика 135 забоя на запоминающее устройство 133 (фиг.7) в плунжере, когда плунжер размещен в забое рядом с этим датчиком 135. Связь между плунжером и этим датчиком может быть проводной связью или беспроводной связью (к примеру, электромагнитной, индуктивной и т.д.). Сохраненная информация (в запоминающем устройстве 133 датчика) переносится плунжером на поверхность, где сохраненная информация передается посредством приемного устройства 128 контроллеру 104.
Фиг.2-6 иллюстрируют пример работы системы добычи с помощью плунжерного подъемника под управлением электрического контроллера 104. Первоначально, как проиллюстрировано на фиг.2, скважина закрыта (клапан 106 закрыт). Давление в стволе скважины нарастает (как результат вхождения газа из окружающего пластового резервуара в ствол скважины посредством перфораций 112, фиг.1), при этом столб 202 жидкости создается вокруг плунжера 120, который размешен внизу насосно-компрессорной трубы 114. Заметим, что плунжер 120 насажен на пружину 118 (фиг.1).
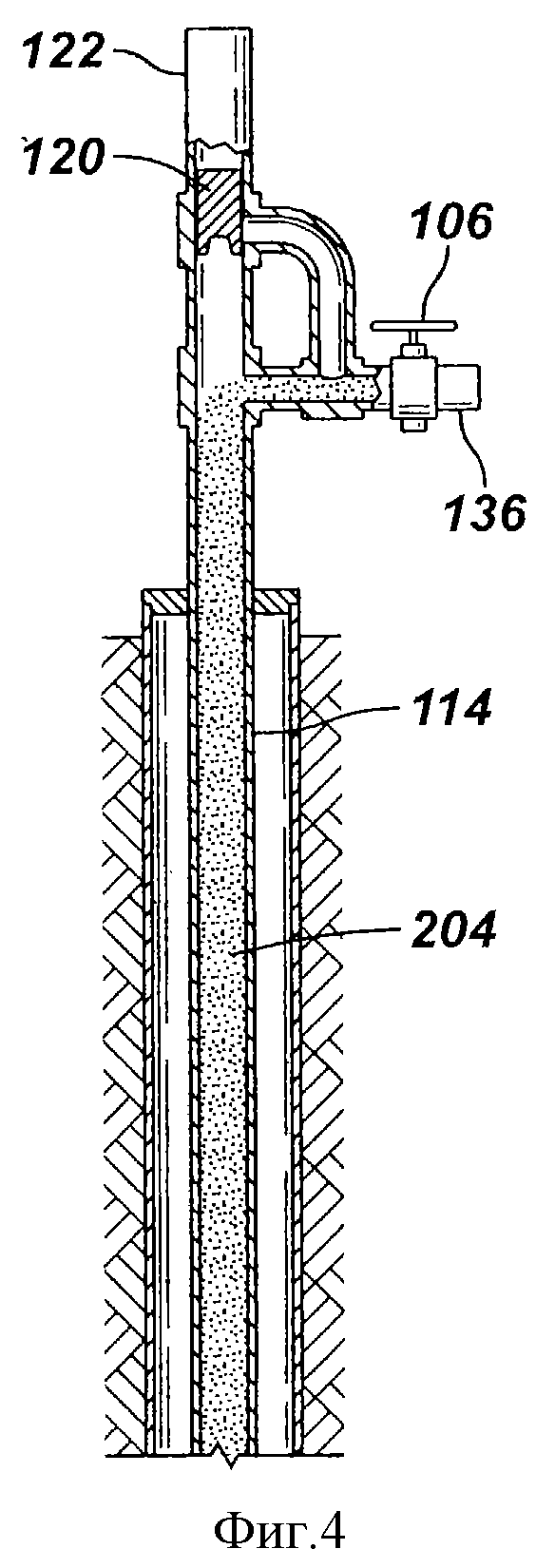
Далее, как показано на фиг.3, клапан 106 открывается электронным контроллером 104, что дает возможность увеличенному давлению в стволе скважины перемещать плунжер 120 (и столб 202 жидкости) вверх по направлению к оборудованию устья скважины. Решение открыть клапан 106 может быть основано на временном критерии и/или измеренных параметрах забоя скважины (параметры измерены либо ранее, либо в реальном времени). Как показано на фиг.3, поток газа 204 под плунжером 120 перемещает плунжер 120 вверх. Когда плунжер 120 размещается в фиксаторе (фиг.1), как показано на фиг.4, поток газа обходит плунжер 120 и проходит трубу 136 (с по-прежнему открытым клапаном 106). Как показано на фиг.5, когда жидкости накапливаются в стволе скважины, скорость потока газа падает. После обнаружения сниженного потока газа электронный контроллер 104 закрывает клапан 106. Когда клапан 106 закрыт, плунжер 120 опускается на столб 206 накопленной жидкости внизу насосно-компрессорной трубы 114, как изображено на фиг.6. Плунжер 120 опускается вниз насосно-компрессорной трубы 114 до положения, показанного на фиг.2. Процесс, показанный на фиг.2-6, после этого повторяется.
Как показано на фиг.7, компоненты плунжера 120 и приемного устройства 128 изображены подробнее. Плунжер 120 включает датчики 132, 134. Плунжер 120 может включать меньше или больше, чем два датчика 132, 134, изображенные на фиг.7. Датчики 132, 134 питаются от источника 202 питания, которым может быть аккумулятор, конденсатор или сочетание аккумулятора и конденсатора. Другие источники питания также могут быть использованы в других вариантах осуществления. Датчики 132, 134 подсоединены к телеметрическому элементу 136. В верхнем конце плунжера 120 расположен разъем 204 для подключения к сочленяющемуся разъему 206 в приемном устройстве 128. Разъемы 204, 206 обеспечивают электрическое соединение между плунжером 120 и приемным устройством 128 для обеспечения проводной электрической связи. Так же, электрическое подключение позволяет приемному устройству 128 заряжать источник питания 202 в плунжере 120.
Альтернативно, вместо проводного соединения между разъемами 204 и 206 телеметрический элемент 136 обеспечивает беспроводную связь, например, электромагнитную связь, радиочастотную связь, индуктивную связь, инфракрасную связь, связь по импульсу давления и т.п.Телеметрический элемент 136 может, например, сообщаться беспроводным способом с телеметрическим элементом 208 в приемном устройстве 128. Таким образом, телеметрическими элементами 136, 208 могут быть электромагнитные телеметрические устройства (для передачи электромагнитных сигналов), радиочастотные телеметрические устройства (для передачи радиочастотных сигналов), индуктивные телеметрические устройства, инфракрасные телеметрические устройства (для передачи инфракрасных сигналов) или телеметрические устройства по импульсу давления (чтобы передавать сигналы импульса давления).
Телеметрический элемент 208 подключен к интерфейсу 210 в приемном устройстве 128. Интерфейс 210 связан кабелем 129 с электронным контроллером 104. Электронный контроллер 104 включает центральный процессор 212 и запоминающее устройство 214. Программные модули в электронном контроллере 104 исполняются в центральном процессоре 212. Эти программные модули 216 включают программные модули для приема обработки информации измерений от датчиков 132, 134. Программные модули 216 также обеспечивают сообщение с удаленным узлом 142 (фиг.1) для передачи информации измерений, а также другой оперативной информации, связанной с системой добычи с помощью плунжерного подъемника. Программные модули 216 также могут включать программное обеспечение для обработки информации от датчиков 132, 134 для отслеживания производительности ствола скважины, а также управления работой системы добычи с помощью плунжерного подъемника. Например, один такой программный модуль может быть запрограммирован интервалами времени, с которыми система плунжера должна переключаться между своим положением на поверхности и в забое скважины, учитывая параметры забоя, измеренные датчиками 132, 134.
Программные модули 216 также могут оценивать производительность системы добычи с помощью плунжерного подъемника на основе измеренных параметров забоя скважины, связанных со стволом, месторождением и пластовым резервуаром. Циклическое переключение плунжера 120 может быть отрегулировано на основе оцененной производительности.
Плунжер 120 также может включать газ под давлением, который выпускается посредством экономичного предохранительного клапана, находясь в смазочном устройстве поверхности скважины. Когда отслеживаемое давление ствола скважины превышает заранее определенный порог, газ под давлением может быть выпущен для опускания плунжера 120 обратно в ствол.
Кроме того, обслуживание системы добычи с помощью плунжерного подъемника может быть оптимизировано посредством обеспечения удаленного мониторинга на удаленном узле 142.
Инструкции таких программных процедур или модулей сохраняются на одном или более запоминающих устройств в соответствующих системах и загружаются для исполнения на соответствующих процессорах. Процессоры включают микропроцессоры, микроконтроллеры, процессорные модули или подсистемы (включающие в себя один или более микропроцессоров или микроконтроллеров), или другие управляющие, или вычислительные устройства. При использовании здесь "контроллер" относится к аппаратным средствам, программному обеспечению или их сочетанию. «Контроллер» может относиться к одному компоненту или множеству компонентов (программных или аппаратных).
Данные и инструкции (программного обеспечения) сохраняются на соответствующих запоминающих устройствах, которые реализованы как один или несколько машиночитаемых носителей хранения. Носители хранения включают различные формы запоминающих устройств, в том числе полупроводниковые запоминающие устройства, такие как динамическое или статическое оперативное запоминающее устройство (динамическое ОЗУ или статическое ОЗУ), стираемое и программируемое постоянное запоминающее устройство (СППЗУ), электрически стираемое и программируемое постоянное запоминающее устройство (ЭСППЗУ) и флэш-память, магнитные диски, такие как стационарные, флоппи- и съемные диски, другие магнитные носители, в том числе ленту, и оптические носители, такие как компакт-диски (CD) ил цифровые универсальные диски (DVD).
Хотя изобретение раскрыто применительно к ограничительному числу вариантов осуществления, специалистам в данной области техники должно быть ясно, что может существовать множество их модификаций и вариантов. Подразумевается, что прилагаемая формула изобретения охватывает эти модификации и варианты как подпадающие под идею и область применения изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ПРОЦЕССОМ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ЭКСПЛУАТАЦИИ МНОГОПЛАСТОВЫХ ОБСАЖЕННЫХ СКВАЖИН (ВАРИАНТЫ) И ИСПОЛНИТЕЛЬНЫЙ МОДУЛЬ В СОСТАВЕ УСТРОЙСТВА (ВАРИАНТЫ) | 2010 |
|
RU2475643C2 |
| ОБНАРУЖЕНИЕ ПОЛОЖЕНИЯ ПЛУНЖЕРА В СКВАЖИНЕ | 2013 |
|
RU2608661C2 |
| ОБНАРУЖЕНИЕ ПОЛОЖЕНИЯ ПЛУНЖЕРА В СКВАЖИНЕ | 2014 |
|
RU2644184C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ СТАНКОМ-КАЧАЛКОЙ | 1997 |
|
RU2165035C2 |
| СИСТЕМА С БЕСКОНТАКТНЫМИ ДАТЧИКАМИ | 2014 |
|
RU2671606C2 |
| Способ передачи телеметрических сигналов при эксплуатации добывающих скважин штанговыми глубинными насосами и система для его реализации | 2022 |
|
RU2793933C1 |
| СИСТЕМА С ПЕРЕКЛЮЧАЮЩИМ КЛАПАНОМ И СПОСОБ ДОБЫЧИ ГАЗА | 2014 |
|
RU2671370C2 |
| ГОРИЗОНТАЛЬНО-ВЕРТИКАЛЬНАЯ НАСОСНАЯ СИСТЕМА ДЛЯ ИЗВЛЕЧЕНИЯ СКВАЖИННОЙ ТЕКУЧЕЙ СРЕДЫ | 2012 |
|
RU2650983C2 |
| СПОСОБЫ, СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ НА ГИБКОЙ НАСОСНО-КОМПРЕССОРНОЙ ТРУБЕ | 2006 |
|
RU2391502C2 |
| Установка одновременно-раздельной добычи нефти скважиной с наклонно-направленными забоями | 2019 |
|
RU2702801C1 |




Система плунжерного подъемника предназначена для использования в нефтяной промышленности. Включает оборудование устья скважины, содержащее приемное устройство, трубу, проходящую от указанного оборудования в ствол скважины, и плунжер, способный проходить через трубу в забой скважины. Плунжер включает, по меньшей мере, датчик для измерения параметра забоя скважины и способен передавать измеренный параметр забоя скважины приемному устройству. 3 н. и 29 з.п.ф-лы, 7ил.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ И НАТЯЖЕНИЯ КАБЕЛЯ | 1997 |
|
RU2132459C1 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТЫ ГЛУБИННОГО ШТАНГОВОГО НАСОСА | 2003 |
|
RU2236582C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И ПЕРЕДАЧИ ДАННЫХ В ЭКСПЛУАТАЦИОННОЙ СКВАЖИНЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2122113C1 |
| 0 |
|
SU265808A1 | |
| US 4802359 А, 07.02.1989. | |||

