ПРЕДПОСЫЛКИ
[0001] Настоящее изобретение относится к плунжерам, которые применяютcя для удаления жидкости из газовых скважин или т.п. Более конкретно, изобретение относится к обнаружению положения плунжера при его перемещении по длине скважины.
[0002] Для извлечения газа и жидкостей, находящихся в земле, применяютcя глубокие скважины. Например, такие скважины применяютcя для извлечения природного газа из подземных заполненных газом полостей. Скважина содержит длинную трубу, которая размещена в стволе, пробуренном в землю. Когда скважина достигает заполненной природным газом полости, газ можно извлекать на поверхность.
[0003] С течением времени эксплуатации газовой скважины жидкость, например вода, обычно накапливается на дне скважины. Данная вода замедляет проход и со временем создает препятствие проходу природного газа на поверхность. В одной методике для продления эксплуатационного ресурса скважины применяют систему на основе плунжерного лифта, удаляющую жидкость из забойной зоны скважины. Положением плунжера в скважине управляют, открывая и закрывая клапан на устье скважины. Когда клапан закрыт, выход потока газа из скважины прекращается, и плунжер падает, проходя через воду, на забой скважины. Когда плунжер достигает забоя скважины, клапан может открываться, при этом давление в скважине выталкивает плунжер на поверхность. При подъеме плунжер поднимает жидкость, находящуюся над ним, на поверхность, при этом из скважины удаляется большая часть жидкости.
[0004] Для эффективной эксплуатации плунжера требуется идентификация момента достижения плунжером забоя скважины. Для определeния момента достижения плунжером забоя скважины применяются различные методики, например, одна методика описана в патенте US Patent № 7,963,326, выдан 21 июня 2011 г., под названием "Method and Apparatus for Utilizing Pressure Signature in Conjunction with Fall Time as Indicator in Oil and Gas Wells", Giacomino.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Система для обнаружения момента достижения плунжером забоя скважины включает в себя датчик давления, выполненный с возможностью измерения давления в скважине и предоставления данных измеренного давления на выходе. Электронная схема вычисления производной вычисляет производную измеренного давления на выходе. Электронная схема обнаружения обнаруживает момент достижения плунжером забоя скважины на основе вычисленной производной.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
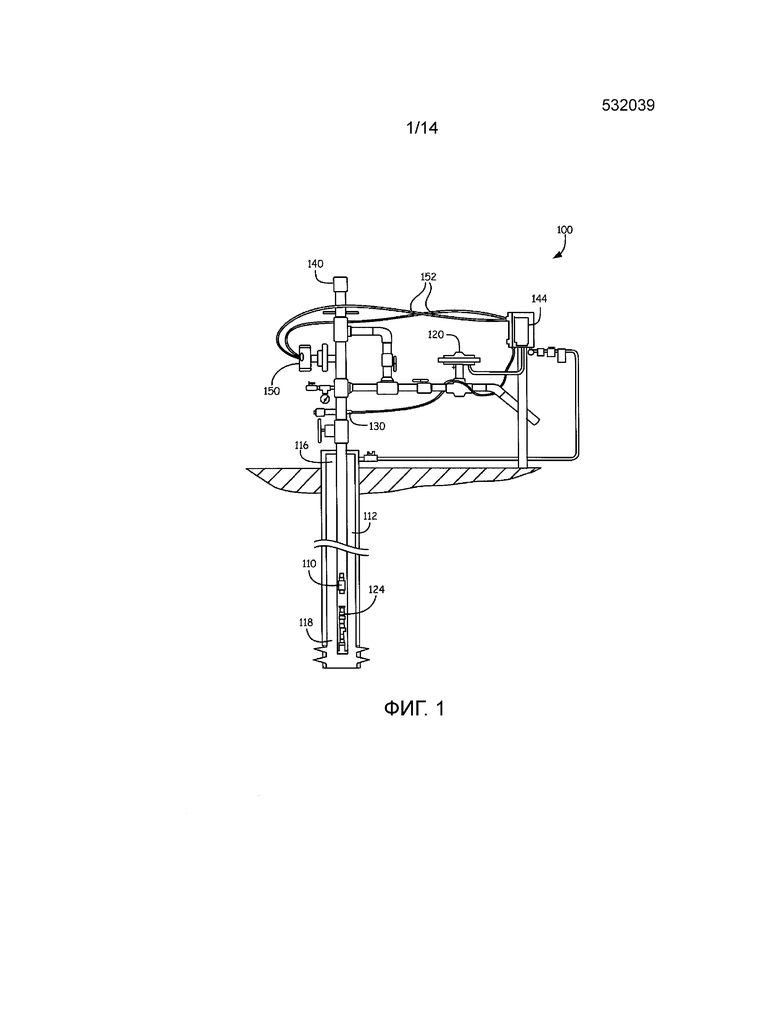
[0006] На фиг.1 упрощенно показана скважина, где применяется система для идентификации местоположения плунжера согласно настоящему изобретению.
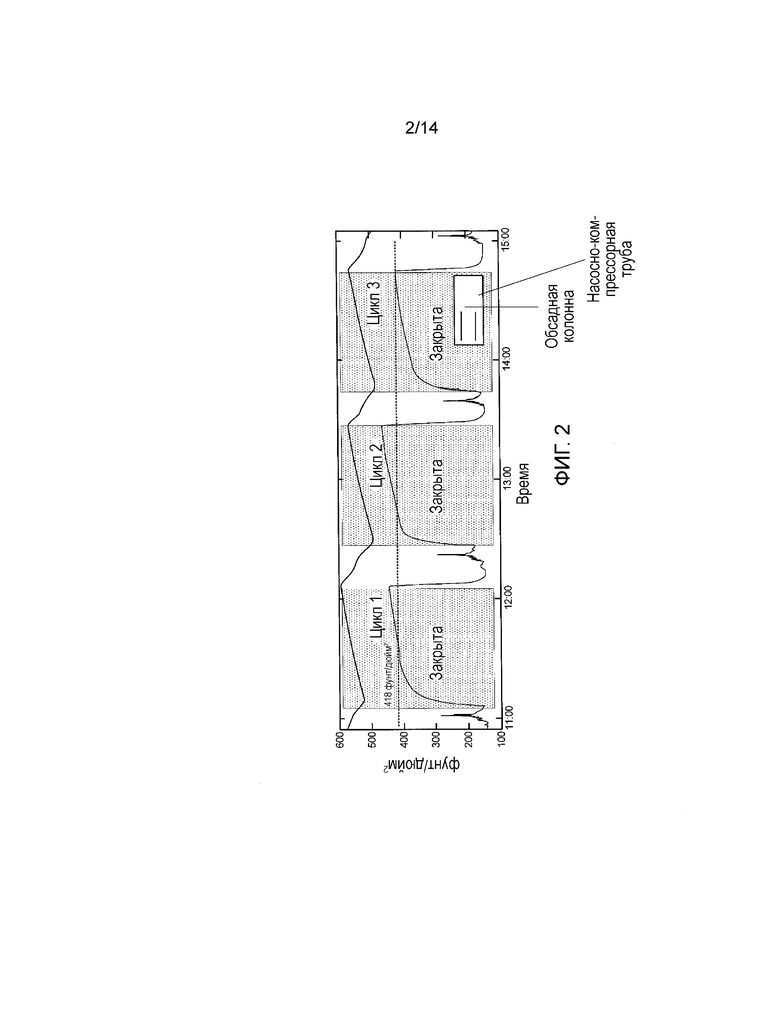
[0007] На фиг.2 показан график зависимости давления от времени для являющейся примером скважины.
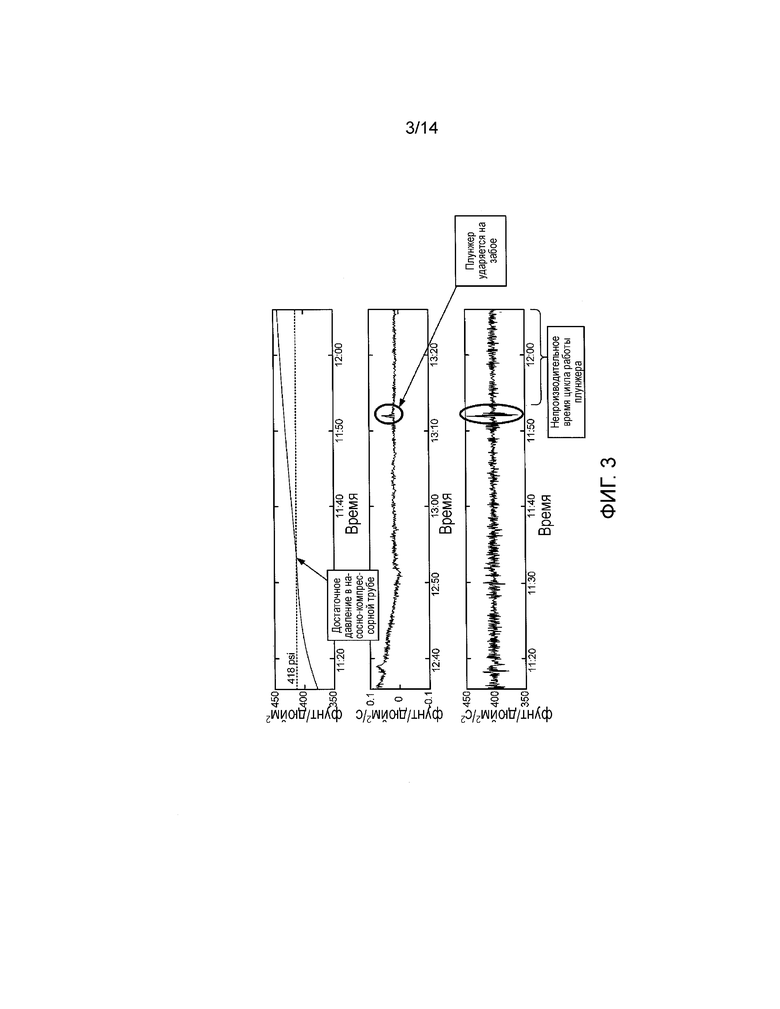
[0008] На фиг.3 показаны графики зависимости давления, а также его первой и второй производной от времени, взятые из графика фиг.2.
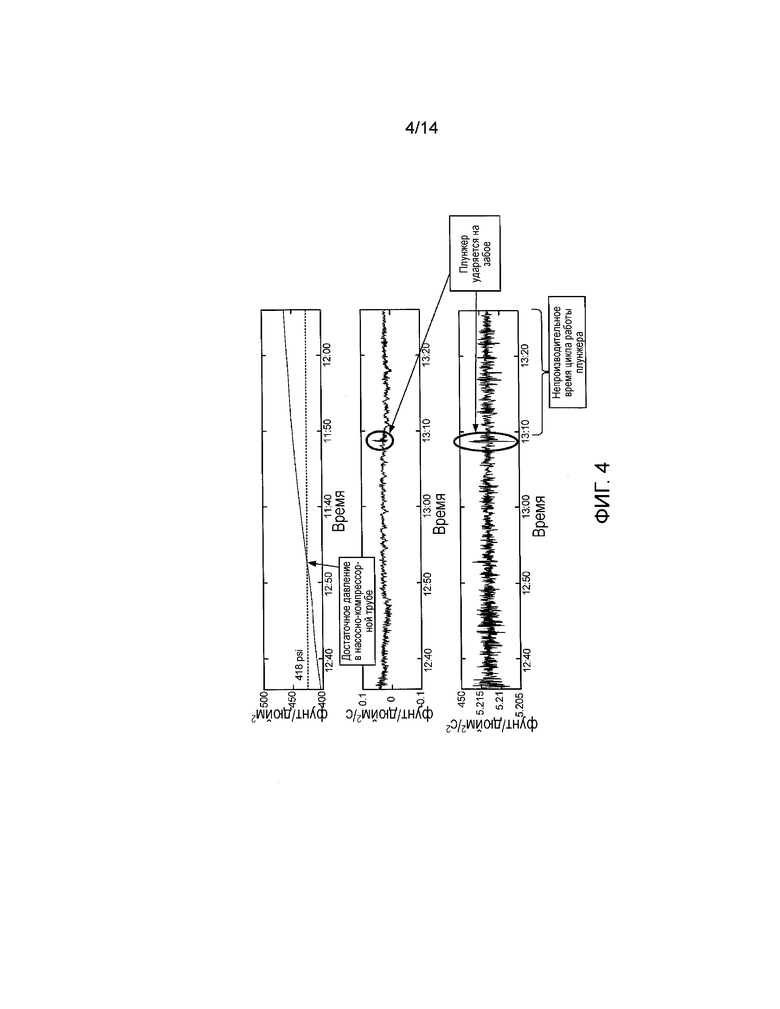
[0009] На фиг.4 и 5 показаны более подробные графики зависимости давления, его первой производной и его второй производной от времени из графика фиг.2.
[0010] На фиг. 6 показан график зависимости давления от времени, с числом циклов в другом примере скважины.
[0011] На фиг.7, 8, 9 и 10 показаны графики зависимости давления, его первой, производной и второй производной от времени, взятые из графика фиг. 6.
[0012] На фиг.11 показана упрощенная электронная схема для вычисления скорости изменения согласно одному примеру варианта осуществления.
[0013] На фиг.12 показана упрощенная блок-схема системы измерительного преобразователя давления и скважинного контроллера, применяемая для определения момента достижения плунжером забоя скважины.
[0014] На фиг.13 показан другой пример варианта осуществления измерительного преобразователя давления и скважинного контроллера.
[0015] На фиг.14 показана упрощенная блок-схема детектора событий, показанного на фиг.13.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0016] Настоящим изобретением создана система для идентификации момента достижения плунжером забоя скважины, например газовой скважины. Более конкретно, созданы способ и устройство, которыми измеряют давление в скважине. Измеренное давление анализируют и применяют для идентификации момента достижения плунжером забоя скважины. Вместо использования только аномалий давления для идентификации местоположений плунжера в настоящем изобретении используют производные по информации сигнала датчика давления. В конкретных примерах ведется мониторинг первой производной и/или второй производной измеренного давления. Изменения в первой и/или второй производной используют для идентификации момента достижения плунжером забоя скважины.
[0017] На начальном этапе эксплуатации газовой скважины газ обычно свободно проходит из подземного горизонта на поверхность под действием высокого давления в коллекторе. Однако с течением времени при эксплуатации скважины на забой газовой скважины начинает поступать вода. Обратное давление водного столба, возникающее в результате, в соединении c уменьшением давления в коллекторе обуславливает замедление притока природного газа и затем его полное прекращение.
[0018] Одним решением данной проблемы является закрытие скважины (закрытие задвижки на оборудовании устья скважины), обеспечивающее повышение давления в коллекторе. Когда давление достаточно повышается, задвижку открывают, и повышенное давление выталкивает воду вверх. Вместе с тем, недостаток данного подхода состоит в том, что большой объем воды уходит обратно на забой скважины, и в итоге скважина не получает достаточного дополнительного дебита газа.
[0019] Лучшее решение, которое чаще всего применяют в газовых скважинах, состоит в применении плунжера для подъема воды из скважины. На фиг.1 показана обычная газовая скважина 100 с системой плунжерного лифта. Плунжер 110 является устройством приблизительно одного диаметра с центральной насосно-компрессорной трубой 112 скважины 100, которое свободно перемещается вверх и вниз в скважине. Задвижка 120 с приводом применяетcя для открытия и закрытия скважины, обуславливающего перемещение плунжера 110 к устью 116 или забою 118 скважины, как описано ниже. На забое 118 скважины установлен пружинный амортизатор 124, который предотвращает повреждения плунжера 110 при ударе на забое 118. На оборудовании устья скважины установлен ловитель и датчик 130 прибытия, который ловит плунжер 110 когда плунжер приходит на устье 116 скважины, и генерирует электрoнный сигнал, указывающий на прибытие плунжера 110. Над ловителем расположен лубрикатор 140, который наносит масло, или другой смазочный материал на плунжер 110, обеспечивая свободное перемещение последнего по насосно-компрессорной трубе. Электрoнный контроллер 144 управляет работой скважины, принимая поступающие сигналы измерений (например, давления в насосно-компрессорной трубе и прибытия плунжера), и передавая команды на открытие и закрытие задвижки 120 с приводом в нужное время.
[0020] Плунжерные компоновки, применяемые для подъема поступающей скважинной текучей среды на поверхность, работают, как насосы с очень длинным ходом. Плунжер 110 выполнен с возможностью служить сплошным интерфейсом между столбом текучей среды и поднимающимся газом. Когда плунжер 110 перемещается, имеется перепад давления на плунжере 110, который должен препятствовать уходу обратно любой текучей среды. Поэтому объем, доставленный на поверхность, должен практически равняться начальной нагрузке. Плунжер 110 перемещается от забоя 118 к устью 116, действуя, как протирающее устройство, удаляющее жидкости в колонне насосно-компрессорных труб. Серийно производятся и поставляются плунжеры многих типов.
[0021] Плунжер 110 может иметь различные формы. Некоторые плунжеры включают в себя подпружиненные расширяющиеся лезвия, которые уплотняются в распор к стенкам насосно-компрессорной трубы в скважине для создания перепада давления для хода вверх. К плунжерам других типов относятся плунжеры с лабиринтными кольцами для обеспечения уплотнения, плунжеры с внутренним байпасом, который обеспечивает плунжеру ускоренное падение, и т.д.
[0022] Поскольку газопроизводитель может эксплуатировать тысячи скважин, число контрольно-измерительных устройств и устройств управления на любой данной скважине является обычно минимальным. В некоторых случаях на скважинах могут только выполнять измерения двумя измерительными преобразователями давления, одним, измеряющим давление в насосно-компрессорной трубе (центральной трубе, по которой падает плунжер, и по которой газ в нормальных условиях проходит), и другим, измеряющим давление в обсадной колонне (также называют кольцевым пространством, окружающим насосно-компрессорную трубу). Задвижка 120 с приводом открывается и закрывается для управления падением плунжера 110 на забой 118 скважины 100 или его перемещением к устью 116 с помощью электрического контроллера 144, часто программируемого логического контроллера, (ПЛК) или дистанционного пульта оператора, (ROC). Контроллер 144 принимает передаваемые сигналы измерений, и открывает и закрывает задвижку 120 с приводом в нужное время для оптимиальной эксплуатации скважины. В некоторых конфигурациях можно также иметь плунжер: датчик прибытия (который обнаруживает достижение плунжером оборудования устья скважины), датчик измерения температуры или датчик расхода.
[0023] Одним из важных аспектов управления добычей газа с помощью плунжерного лифта является требование закрытия скважины на нужное время. Конкретно, скважина должна закрываться на время, достаточное для достижения плунжером забоя. Если плунжер не пройдет весь путь до забоя, то при открытии задвижки с приводом, удаления всей воды не произойдет и скважина не вернется к оптимальной эксплуатации. Если происходит такое, то время, которое затрачено для падения и возврата плунжера (которое может составлять 30 минут или больше), тратится впустую. Еще более критичным является случай, когда задвижка с приводом открывается до падения плунжера в воду, здесь в отсутствие воды, тормозящей плунжер, скорость поднимающегося плунжера (обусловленная высоким давлением в скважине) может увеличиться настолько, что вызовет повреждение плунжера или лубрикатора/ловителя, или даже полный отрыв ловителя от оборудования устья скважины.
[0024] Вследствие опасности преждевременного перехода плунжера к подъему в большинство программ управления скважиной следует предусматривать "фактор безопасности". Следует закрывать скважину на время, достаточное для достижения плунжером забоя, плюс некоторое дополнительное время, для обеспечeния гарантированного достижения плунжером забоя. Недостаток здесь заключается в непроизводительном времени, когда плунжер стоит на забое, и газовая скважина не работает. Чем дольше плунжер стоит на забое, тем больше времени проходит до возврата газовой скважины к полному дебиту.
[0025] Используют различные методики для обнаружения момента достижения плунжером забоя скважины. Например, можно осуществлять мониторинг сигналов давления и акустических сигналов, однако данные сигналы часто являются относительно слабыми и их трудно идентифицировать вследствие значительного фонового шума, большой длины скважины и ослабления сигнала при проходе через жидкость и газ в скважине. Хотя измерительный преобразователь давления обычно имеется на большинстве скважин, простой мониторинг давления и обнаружение аномалий давления могут приводить к ошибкам в определении местоположения плунжера. Дополнительно, акустическое устройство требует разработки спецификации на дополнительное оборудование, его приобретения, установки, конфигурирования и техобслуживания. Как рассмотрено ниже более подробно, в одном варианте осуществления измерительный преобразователь 150 давления соединяется с давлением в скважине 100 и применяется для определeния момента достижения плунжером 110 забоя 118 скважины 100 на основе производной измеренного давления. Данную информацию можно сообщать на контроллер 144 и применять для управления эксплуатацией скважины 100. Данную информацию можно сообщать на контроллер 144, применяя любую подходящую методику, например, схему 152 управления технологического процесса. Схема 152 управления технологического процесса может работать согласно стандартным методикам связи, применяемым в эксплуатации скважины, в том числе, например, методикам проводной и беспроводной связи. Частное давление измерительного преобразователя 150 давления обычно является давлением в центральной колонне скважины, вместе с тем, можно осуществлять мониторинг другого давления, в том числе давления в различных секциях скважинной обсадной колонны.
[0026] Как рассмотрено ниже, измерения скважинного давления можно применять для определeния момента достижения плунжером забоя скважины. На фиг.2 показана зависимость давления от времени в скважинной насосно-компрессорной трубе первой являющейся примером скважины. Всего показано три цикла перемещений плунжера. Закрашенными блоками показано время, в течение которого скважина закрыта для каждого цикла, начинающееся с момента закрытия задвижки с приводом и начала спуска плунжера и заканчивающееся моментом открытия задвижки с приводом и начала подъема плунжера к поверхности. Пунктирной линией показано минимальное повышение давления в насосно-компрессорной трубе (418 фунт/дюйм2(2,8 МПа). В данном примере промысловый инженер определил, что после закрытия скважины давление в насосно-компрессорной трубе требует повышения по меньшей мере до 418 фунт/дюйм2(2,8 МПа) для получения достаточного противодавления для подъема плунжера обратно на устье скважины.
[0027] Как показано на фиг.2, данная конкретная скважина также закрывается, как минимум, на время 60 минут. Данное обеспечивает достижение плунжером забоя скважины до начала подъема на устье. Как описано выше, задвижка с приводом не должна открываться раньше времени. Другая опасность при преждевременном подъеме плунжера состоит в том, что если плунжер идет вверх совершенно сухим, давление в скважине может обуславливать набор плунжером скорости, достаточной для полного отрывания компоновки ловителя/лубрикатора от оборудования устья скважины. Поэтому обычно имеется принятый фактор безопасности, требующий закрытия скважины на время, не меньше минимального. В данной являющейся примером скважине минимальное время закрытия составляет 60 минут.
[0028] Таким образом, на данной скважине ПЛК или скважинный контроллер имеет логическую схему закрытия, которую можно выразить следующим образом:
ЕСЛИ Ptubing > 418 фунт/дюйм2(2,8 МПа) И Интервал Времени Закрытия > 60 мин, ТОГДА Открывают Задвижку с Приводом,
где Ptubing является давлением в скважинной насосно-компрессорной трубе.
[0029] На фиг.3 показан с увеличением участок периода времени закрытия для цикла 1 фиг.2. Отмечается период времени данного графика от 11:17 (около 11 минут после закрытия) до около 12:05 (перед открытием задвижки с приводом). Имеются три тренда, видимых на графике. Верхний тренд является давлением в насосно-компрессорной трубе, как обычно обнаруживаемым скважинным контроллером. Средний и нижний графики, соответственно, показывают первую и вторую производные давления в насосно-компрессорной трубе. Первая производная является индикацией крутизны кривой сигнала давления. Вторая производная дает индикацию кривизны кривой сигнала давления.
[0030] В 11:33 давление в насосно-компрессорной трубе превышает минимальное требуемое давление в 418 фунт/дюйм2(2,8 МПа). В 11:52 видно отчетливое событие на графике, как первой, так и второй производных давления в насосно-компрессорной трубе. Может сделать заключение, что данное событие соответствует моменту достижения плунжером забоя скважины. Аналогичные события возникают приблизительно в одно время на графике первой и второй производных Цикла 2 (фиг.4) и Цикла 3 (фиг.5). Данное означает, что плунжеру требуется 46 минут для падения до забоя, и плунжер имеет среднюю скорость падения 206 футов (63 м) в минуту.
[0031] Как показано на фиг.3, через 14 минут после события на графиках производных (в 12:06) истекли 60 минут времени закрытия, и задвижка с приводом открылась. Считая, что данные события соответствуют достижению плунжером забоя, данные 14 минут являются непроизводительным временем цикла. Подъем плунжера, начатый на 14 минут раньше, обеспечит скважине значительно более ранний возврат к эксплуатации.
[0032] На фиг.4 и 5 показаны аналогичные графики для Цикла 2 и Цикла 3 для той же скважины. События на графике производных видны соответственно через 42 минуты и 45 минут после закрытия скважины.
[0033] Отличающиеся скважины могут показывать отличающиеся рисунки событий производных. На фиг.6 показан график зависимости давления от времени с использованием данных по насосно-компрессорной трубе, снятых во второй скважине. Данные собирали для 4 циклов перемещений плунжера. На фиг.7 показана зависимость давления от времени на графиках первой и второй производных только для одного из циклов перемещения плунжера (Цикл 4). В данном случае событие легче всего идентифицировать, рассматривая график вычисления второй производной. Данные показывают аналогичное событие для других циклов (1, 2, и 3) перемещений плунжера всегда через приблизительно одно время после закрытия. Данное событие производной также соответствует удару плунжера на забое скважины.
[0034] Как показано выше, скорость изменения (первую и вторую производные) можно использовать для производства заключений и идентификации событий, происходящих с плунжером. Вместе с тем, трудно управлять скважиной на основе только данных производных по сигналам давления. Причина в том, что во время периодов в цикле перемещений плунжера, иных, чем период падения плунжера, значения первой и второй производных сигналов давления в насосно-компрессорной трубе или обсадной колонне могут быть значительно выше, чем в момент удара плунжера о воду (или на забое скважины). Поэтому необходимо создавать некоторое условие синхронизации для определения местоположения плунжера так, что данные события, происходящие с плунжером, обнаруживаются только в заданном временном окне.
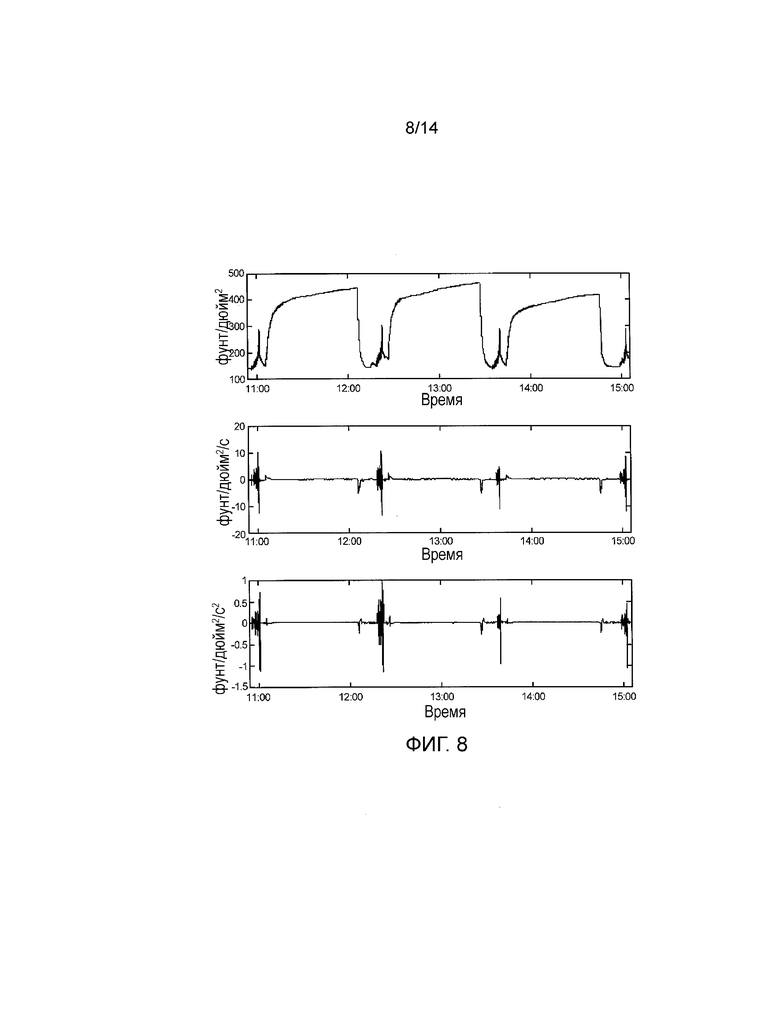
[0035] На фиг.8 показаны графики зависимости от времени давления в насосно-компрессорной трубе и первой и второй производных для многочисленных циклов перемещений плунжера в другой являющейся примером скважине. Наиболее резкие изменения давления в насосно-компрессорной трубе происходят непосредственно перед возвратом плунжера на устье скважины (когда плунжер выталкивает местные скопления воды через оборудование устья скважины). В результате данных резких изменений давления в насосно-компрессорной трубе, первая и вторая производные являются неустойчивыми и получают как положительное, так и отрицательное значения. Обычно в скважине возможно обнаружение момента достижения плунжером устья скважины с применением нескольких отличающихся технологий обнаружения. Данные события на графике производных следует исключить из определения момента достижения плунжером забоя скважины.
[0036] На фиг.9 показан тот же график зависимости от времени давления в насосно-компрессорной трубе и его первой и второй производных для одного из циклов падения плунжера фиг.8. На фиг.9 показано, что сразу после закрытия задвижки с приводом и начала падения плунжера, имеется быстрое увеличение давления в насосно-компрессорной трубе и в результате очень большое увеличение первой и второй производных. Данное увеличение значительно больше изменений первой и второй производных, которые можно видеть, когда плунжер ударяется на забое скважины. Здесь система также не должна обнаруживать событие, вызываемое плунжером сразу после закрытия задвижки с приводом.
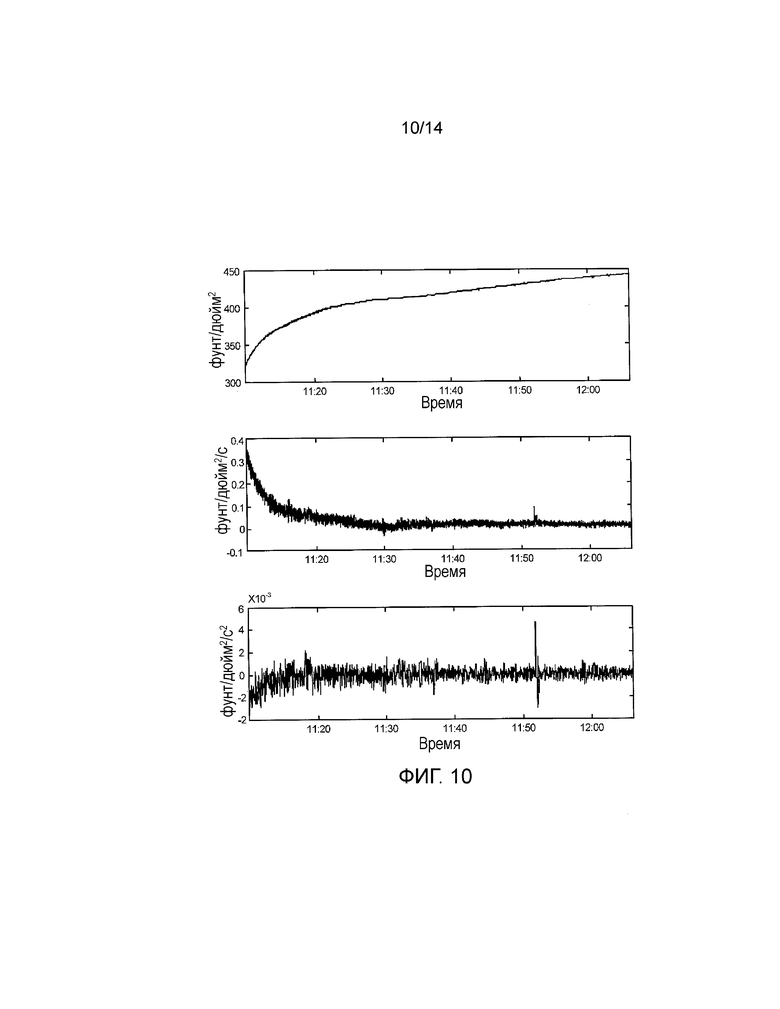
[0037] На фиг.10 показан дополнительный увеличенный участок тех же переменных, начинающийся приблизительно через 10 минут после закрытия скважины. Здесь первая и вторая производные совершенно ясно показывают обнаружение события с плунжером, например удара плунжера на забое скважины. Данное событие имеет дополнительную ценность для оптимизации работы скважины, поскольку может использоватьcя скважинным контроллером для идентификации момента достижения плунжером забоя скважины. Поэтому алгоритм обнаружения события с плунжером должен включать в себя синхронизацию некоторого типа и такую логическую схему, с помощью которых происходящие с плунжером события обнаруживаются только в нужное время во время скважинного цикла. Например, измерительный преобразователь 150 давления, показанный на фиг.1, может принимать нужную команду с ПЛК после закрытия задвижки с приводом. Функцию таймера можно использовать так, что измерительный преобразователь 150 давления обнаруживает события по графику производной только по истечении нескольких минут (например, 10 минут) после команды пуск.
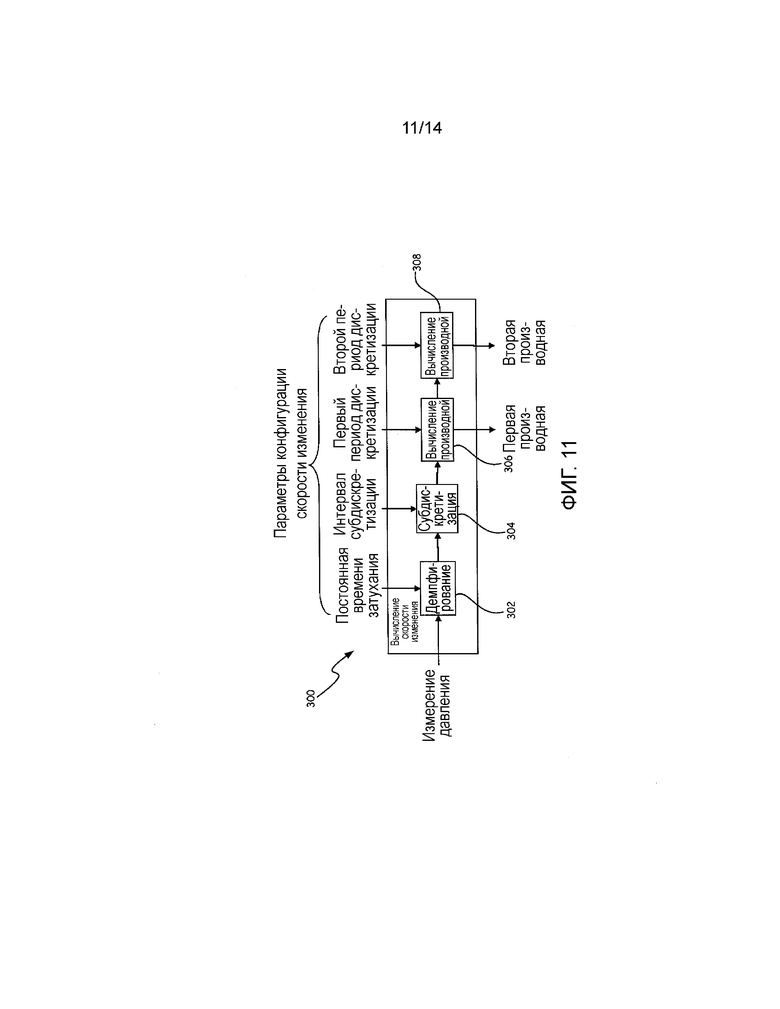
[0038] На фиг.11 показана простая блок-схема электронной схемы 300 вычисления скорости изменения. Электронная схема вычисления скорости изменения принимает измерение давления с датчика давления, измерение обрабатывается демпфирующей электронной схемой 302. Демпфирующая электронная схема 302 принимает регулируемую постоянную времени затухания и может применятьcя как высокочастотный фильтр для уменьшения величины изменения в сигнале измерения давления и при этом уменьшать объем вычислений, требуемых для получения первой и второй производных. Также оборудована электронная схема 304 субдискретизации с регулируемым интервалом субдискретизации. Данная субдискретизация уменьшает объем данных в сигнале измерения давления при этом также уменьшая объем вычислений, требуемых для получения первой и второй производных. На фиг.11 показаны также электронные схемы 306 и 308, соответственно, вычисления первой и второй производной. Первый и второй периоды субдискретизации можно отрегулировать как прокручиваемое временное окно субдискретизации, в котором оценивают частную производную. Данные схемы работают, применяя регулируемые первый и второй периоды субдискретизации, и дают на выходе первую и вторую производную, соответственно. Различные блоки, показанные на фиг.11, можно обычно реализовать в микропроцессоре, работающем согласно инструкциям программного обеспечения. Вместе с тем, также возможно реализовать данные блоки как индивидуальные схемные компоненты. Различные параметры скорости изменения могут являться параметрами, конфигурируемыми пользователем или конфигурируемыми в процессе изготовления. Например, данные параметры можно отрегулировать для характеристик конкретной скважины.
[0039] На фиг.12 показана упрощенная схема измерительного преобразователя 150 давления, соединенного со скважинным контроллером 144 соединением 152. Измерительный преобразователь давления включает в себя датчик 320 давления, который выдает информацию измерения давления на электронную схему 300 вычисления скорости изменения, а также скважинный контроллер 144. Первая и вторая производная на выходе из электронной схемы 300 вычисления скорости изменения также выдаются на скважинный контроллер 144. Связь по соединению 152 можно осуществлять по любой подходящей методике. Примеры включают в себя HART®, Fieldbus, Modbus, Profibus, а также другие методики связи. Дополнительно, можно включать в состав методики беспроводной связи, например, WirelessHART®. В данной конфигурации скважинный контроллер 144 может реализовать алгоритм обнаружения события с плунжером на основе первой и/или второй производных, а также на основе информации по синхронизации, связанной с моментом начала спуска плунжера в скважину 100. Например, скважина контроллер 144 может обнаруживать события в первой и/или второй производных по истечении некоторого периода времени, например, через десять минут после закрытия скважины в случае возникновения события. Если первая и/или вторая производная превышает заданный предел, когда данный период времени прошел, данное можно применять, как индикацию скважинному контроллеру 144 достижения плунжером забоя скважины, и скважинный контроллер 144 может давать команду открытия задвижки с приводом.
[0040] На фиг.13 показан другой являющийся примером вариант осуществления, в котором измерительный преобразователь давления включает в себя детектор 330 событий, идентифицирующий событие с плунжером на основе первой и/или второй производной, а также дополнительной информации. Например, информация по синхронизации, которая связана со временем начала спуска плунжера в скважину, может передаваться скважинным контроллером 144 на детектор 330 событий. Параметры конфигурации события могут подаваться на детектор 330 событий. Параметры могут включать в себя, например, пороговые уровни, относящиеся к первой и/или второй производным, а также задержку синхронизации для реализации до применения алгоритма обнаружения события к первой и/или второй производным. Информация по синхронизации может передаваться со скважинного контроллера 144 на детектор 330 событий с использованием соединения 152. Данную связь можно осуществлять согласно стандартным протоколам связи для контроллера мониторинга технологического процесса. Естественно, надлежащие методики можно также применять. После обнаружения достижения плунжером забоя скважины измерительный преобразователь 150 давления сообщает информацию состояния, например, разряд индикации состояния, на скважинный контроллер 144 по соединению 152. Скважинный контроллер 144 может затем функционировать согласно логической схеме, сохраняемой в нем для начала подъема плунжера.
[0041] На фиг.14 в упрощенной блок-схеме показана более подробно схема 330 обнаружения события. В блоке 340, одну или обе из первой и второй производных можно выбрать для применения в идентификации момента достижения плунжером забоя скважины. На основе данного выбора выходные данные передаются в блок 342, в котором определяется время задержки до инициирования алгоритма обнаружения. Например, данные могут являться временем, до истечения которого любые события по производной который не связываются с достижением плунжером забоя скважины. Если заданный период времени прошел, в блоке 344 первую и/или вторую производную сравнивают с порогом. Если порог превышен, выдаются выходные данные оповещения о событии. Отмечаем, что другие методики сравнения можно применять, например, можно отслеживать частную сигнатуру или форму колебаний сигнала в первой и/или второй производной, можно осуществлять мониторинг относительных значений первой и второй производных, можно отслеживать продолжительность времени, в течение которого превышается порог первой и/или второй производной и т.д. После идентификации события с применением первой и/или второй производной выдаются выходные данные оповещения о событии. В другом примере оповещение о событии дается на основе сравнения первой производной с первым порогом и второй производной со вторым порогом. Выходные данные могут передаваться в скважинный контроллер для применения в управлении эксплуатацией скважины.
[0042] Хотя настоящее изобретение описано со ссылкой на предпочтительные варианты осуществления, специалистам в данной области техники понятно, что можно производить изменения в его форме и деталях без отхода от сущности и объема изобретения. Хотя первая и вторая производные рассмотрены выше, можно применять производные любого порядка. Различные компоненты или схемы, рассмотренные в данном документе, можно реализовать в программном обеспечении, агрегатном обеспечении или их комбинациях. Как аналоговые, так и/или цифровые схемы могут применяться.







Группа изобретений относится к системе и способу обнаружения момента достижения плунжером забоя скважины. Система включает датчик давления, выполненный с возможностью измерения давления в скважине и представления измеренного давления на выходе; электронную схему вычисления производных, выполненную с возможностью вычисления производной измеренного давления на выходе; электронную схему обнаружения, которая обнаруживает момент достижения плунжером забоя скважины на основе производной на выходе. Причем производная содержит вторую производную. Способ содержит измерение давления скважины и предоставление данных измеренного давления на выходе, вычисление производной измеренного давления на выходе. Обнаружение момента достижения плунжером забоя скважины на основе вычисленной производной, причем производная представляет собой вторую производную. В другом варианте система содержит датчик давления, выполненный с возможностью измерения давления в скважине и представления измеренного давления на выходе. Электронную схему вычисления производных, выполненную с возможностью вычисления производной измеренного давления на выходе. Электронную схему обнаружения, которая обнаруживает момент достижения плунжером забоя скважины на основе производной на выходе, при этом электронная схема обнаружения дополнительно принимает ввод данных синхронизации, связанных с моментом начала спуска плунжера в скважину, и в которой электронная схема обнаружения обнаруживает момент достижения плунжером забоя скважины на основе производной и ввода данных синхронизации. Технический результат заключается в повышении точности определения момента достижения плунжером забоя скважины. 4 н. и 33 з.п. ф-лы, 14 ил.
1. Система для обнаружения момента достижения плунжером забоя скважины, содержащая:
датчик давления, выполненный с возможностью измерения давления в скважине и представления измеренного давления на выходе;
электронную схему вычисления производных, выполненную с возможностью вычисления производной измеренного давления на выходе; и
электронную схему обнаружения, которая обнаруживает момент достижения плунжером забоя скважины на основе производной на выходе,
причем производная содержит вторую производную.
2. Система по п.1, в которой производная содержит индикацию крутизны кривой.
3. Система по п.1, в которой производная содержит индикацию кривизны кривой.
4. Система по п.1, в которой электронная схема вычисления производной вычисляет производную в окне производства измерений.
5. Система по п.4, в которой окно производства измерений является конфигурируемым.
6. Система по п.1, в которой электронная схема обнаружения дополнительно обнаруживает момент достижения плунжером забоя скважины на основе использования первой и второй производных измеренного давления на выходе.
7. Система по п.1, в которой датчик давления, электронная схема вычисления производных и электронная схема обнаружения реализованы в измерительном преобразователе давления.
8. Система по п.1, включающая в себя измерительный преобразователь давления, который реализует электронную схему вычисления производных.
9. Система по п.1, включающая в себя скважинный контроллер, который реализует электронную схему обнаружения.
10. Система по п.1, в которой электронная схема обнаружения дополнительно принимает ввод данных синхронизации, связанных с моментом начала спуска плунжера в скважину, и в которой электронная схема обнаружения обнаруживает момент достижения плунжером забоя скважины на основе производной и ввода данных синхронизации.
11. Система по п.10 в которой ввод данных синхронизации обеспечивает скважинный контроллер.
12. Система по п.1, включающая в себя демпфирующую электронную схему, выполненную с возможностью демпфирования измеренного давления на выходе.
13. Система по п.1, включающая в себя электронную схему субдискретизации, выполненную с возможностью субдискретизации измеренного давления на выходе.
14. Система по п.1, в которой электронная схема обнаружения функционирует согласно параметру минимального времени ожидания.
15. Система по п.14, в которой параметр минимального времени ожидания является конфигурируемым.
16. Система по п.1, в которой электронная схема обнаружения функционирует согласно пороговому пределу обнаружения.
17. Система по п.15, в которой пороговый предел обнаружения является конфигурируемым.
18. Система по п.1, в которой электронная схема обнаружения функционирует согласно выбранной переменной, содержащей одну из первой и второй производной.
19. Система по п.17, в которой выбранная переменная является конфигурируемой.
20. Способ обнаружения момента достижения плунжером забоя скважины, содержащий:
измерение давления скважины и предоставление данных измеренного давления на выходе;
вычисление производной измеренного давления на выходе;
обнаружение момента достижения плунжером забоя скважины на основе вычисленной производной,
причем производная представляет собой вторую производную.
21. Способ по п.20, в котором производная содержит индикацию крутизны кривой.
22. Способ по п.20, в котором производная содержит индикацию кривизны кривой.
23. Способ по п.20, в котором производная вычисляется в окне производства измерений.
24. Способ по п.23, в котором окно производства измерений является конфигурируемым.
25. Способ по п.20, в котором обнаружение дополнительно основано на использовании первой и второй производной.
26. Способ по п.20, в котором обнаружение дополнительно основано на информации по синхронизации, связанной с моментом начала спуска плунжера в скважину.
27. Способ по п.26, в котором информацию по синхронизации дает скважинный контроллер.
28. Способ по п.20, включающий в себя демпфирование измеренного давления на выходе.
29. Способ по п.20, включающий в себя субдискретизацию измеренного давления на выходе.
30. Способ по п.20, в котором обнаружение согласуется с параметром минимального времени ожидания.
31. Способ по п.30, в котором параметр минимального времени ожидания является конфигурируемым.
32. Способ по п.20, в котором обнаружение согласуется с пороговым пределом обнаружения.
33. Способ по п.20, в котором пороговый предел обнаружения является конфигурируемым.
34. Способ по п.20, в котором обнаружение выполняется согласно выбранной переменной, содержащей одну из первой и второй производной.
35. Способ по п.34, в котором выбранная переменная является конфигурируемой.
36. Система для обнаружения момента достижения плунжером забоя скважины, содержащая:
датчик давления, выполненный с возможностью измерения давления в скважине и представления измеренного давления на выходе;
электронную схему вычисления производных, выполненную с возможностью вычисления производной измеренного давления на выходе; и
электронную схему обнаружения, которая обнаруживает момент достижения плунжером забоя скважины на основе производной на выходе,
при этом электронная схема обнаружения дополнительно принимает ввод данных синхронизации, связанных с моментом начала спуска плунжера в скважину, и в которой электронная схема обнаружения обнаруживает момент достижения плунжером забоя скважины на основе производной и ввода данных синхронизации.
37. Способ обнаружения момента достижения плунжером забоя скважины, содержащий:
измерение давления скважины и предоставление данных измеренного давления на выходе;
вычисление производной измеренного давления на выходе;
обнаружение момента достижения плунжером забоя скважины на основе вычисленной производной,
причем обнаружение дополнительно основано на информации по синхронизации, связанной с моментом начала спуска плунжера в скважину.
| US 7963326 B2, 21.06.2011 | |||
| RU 2005134200 A, 10.05.2007 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ ГЛУБИННОГО ШТАНГОВОГО НАСОСА | 2001 |
|
RU2184844C1 |
| US 20090258618 A1, 15.10.2009 | |||
| US 5987385 A, 16.11.1999. | |||

