Предлагаемое изобретение относится к области нефтедобычи и предназначено для контроля работы глубинного штангового насоса.
Известно устройство для контроля технологического состояния штанговых глубинных насосов, содержащее пьезоэлектрический преобразователь, подавитель сетевых помех, фильтр с регулируемой полосой пропускания по верхним и нижним частотам, усилитель, аналого-цифровой преобразователь, блок памяти, индикаторное устройство и блок управления (патент RU 2097553 С1 по кл. Е 21 В 47/04, БИ №33, 1997 г.).
Недостатком данного устройства является то, что контроль технического состояния глубинного штангового насоса производится посредством анализа акустических шумов, принимаемых на устье скважины пьезоэлектрическим преобразователем. Этот анализ дает лишь косвенную оценку состояний режимов работы насоса, а для глубоких скважин затруднен из-за сильного затухания акустических сигналов.
Известно устройство для диагностики состояния эксплуатационных скважин, содержащее датчик усилия, жестко закрепленный концами на полированном штоке станка качалки скважинного штангового насоса, датчик положения, установленный на полированном штоке с возможностью осевого перемещения, и блок регистрации и преобразования сигналов, связанный с датчиками усилия и положения (патент RU 2148709 по кл. Е 21 В 47/00 от 10.05.2000 г.).
Недостаток данного устройства связан с тем, что оно позволяет получить зависимость усилия, приложенного к штанге в районе устья скважины, от перемещения этой штанги, но не позволяет определить характер движения плунжерного штангового насоса.
Наиболее близким по технической сущности к предлагаемому устройству является устройство для контроля работы глубинного штангового насоса, содержащее глубинный датчик перемещения плунжера насоса на основе магниточувствительных элементов, равномерно расположенных на немагнитной вставке в колонну насосно-компрессорных труб над штангой глубинного насоса, кольцевой постоянный магнит, закрепленный на штанге в районе немагнитной вставки, глубинный кабель, формирователь импульсов, реверсивный счетчик импульсов, цифроаналоговый преобразователь, датчик перемещения штока, установленный на устье скважины, и двухкоординатный регистрирующий прибор (патент RU №2184844 по кл. Е 21 В 47/00).
Недостатком данного устройства является сложность реализации, связанная с наличием глубинного кабеля. Кабелю необходимо обеспечить герметичный ввод в глубинный датчик, защиту от механических воздействий на протяжении всей длины скважины и герметичный выход на устье скважины. Это сильно усложняет процесс установки устройства и значительно увеличивает его стоимость.
Технический результат изобретения заключается в упрощении устройства и повышение помехоустойчивости.
Технический результат предлагаемого изобретения достигается тем, что в устройство для контроля работы глубинного штангового насоса, содержащее глубинный датчик перемещения плунжера насоса на основе магниточувствительных элементов, равномерно расположенных на немагнитной вставке в колонну насосно-компрессорных труб над штангой глубинного насоса, кольцевой постоянный магнит, закрепленный на штанге в районе немагнитной вставки, и формирователь импульсов, связанный с глубинным датчиком перемещения, дополнительно введены датчик верхней мертвой точки станка качалки, первый и второй контроллеры и устройство автономного питания, причем первый контроллер установлен в районе устья скважины и его вход соединен с выходом датчика верхней мертвой точки, второй контроллер установлен рядом с глубинным датчиком перемещения и его первый и второй входы связаны соответственно с первым и вторым выходами глубинного датчика перемещения через формирователь импульсов, а устройство автономного питания установлено рядом с глубинным датчиком перемещения и осуществляет электропитание глубинного датчика перемещения, второго контроллера и формирователя импульсов, при этом в процессе установки устройства контроля глубинного штангового насоса перед началом спуска глубинного датчика перемещения проводят синхронизацию работы первого и второго контроллеров путем подачи сигнала "Сброс" на входы сброса контроллеров.
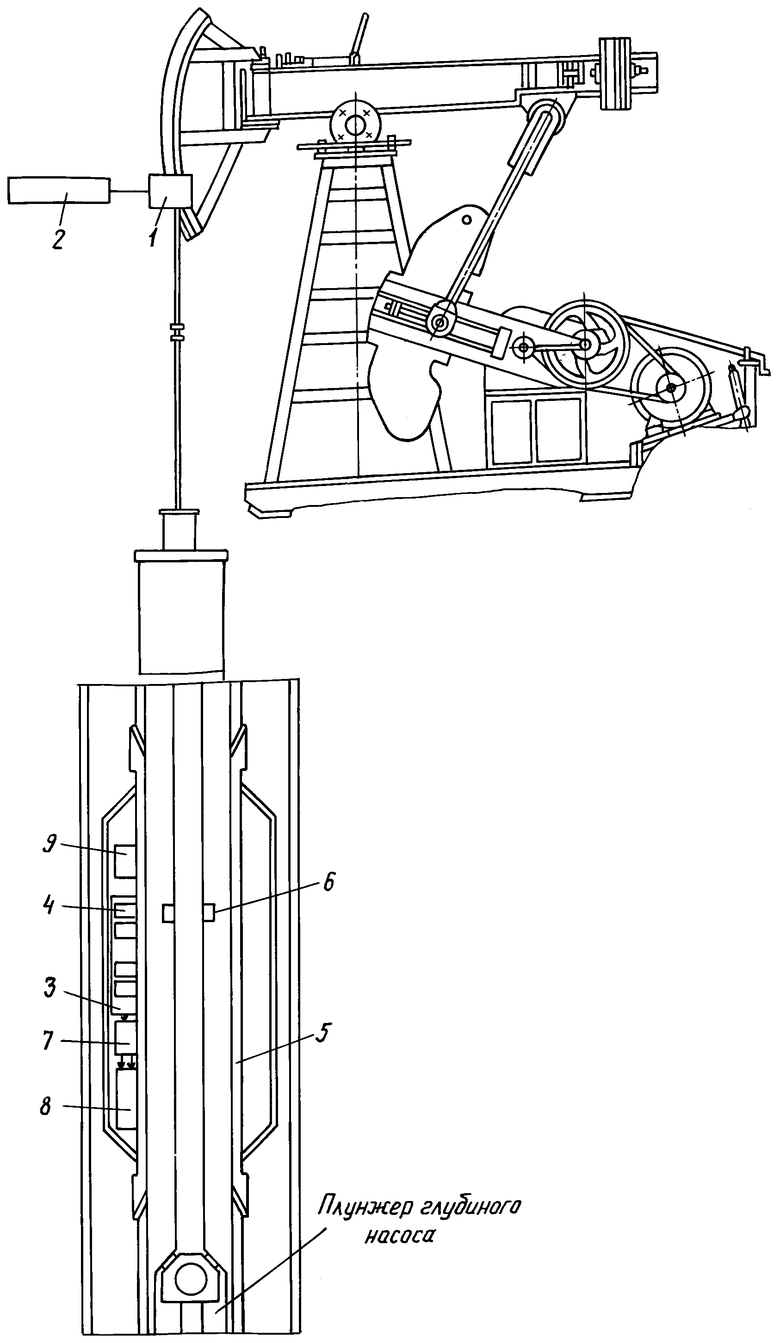
На чертеже представлена схема устройства контроля работы глубинного штангового насоса.
Устройство содержит датчик верхней мертвой точки 1, установленный на станке качалке, первый контроллер 2, глубинный датчик перемещения плунжера штангового насоса 3, выполненный на основе магниточувствительных элементов 4, равномерно расположенных на немагнитной вставке 5 в колонну насосно-компрессорных труб над плунжером глубинного насоса, кольцевой постоянный магнит 6, закрепленный на штанге в районе немагнитной вставки 5, формирователь импульсов 7 и второй контроллер 8. Питание глубинного датчика перемещения 3, формирователя импульсов 7 и второго контроллера 8 производится от устройства автономного электропитания 9.
Для практической реализации устройства можно использовать:
1. Контроллеры 2 и 8 - любой микроконтроллер, например, семейства MCS-51, широко используемые уже более 20 лет.
2. Датчик верхней мертвой точки 1 - любой датчик положения, например индуктивные датчики семейства BERO 3RG4 (Siemens), широко используемые в различных отраслях промышленности.
3. Магниточувствительные элементы 4 - герконы с нормально разомкнутым контактом типа КМ-2 или другие подобные.
4. Формирователь импульсов 7 - строится на стандартных элементах микросхемотехники.
5. Устройство автономного питания 9 - аккумулятор подходящих размеров и мощности.
Устройство работает следующим образом:
Импульсы, формируемые датчиком верхней мертвой точки 1, поступают в первый контроллер 2. Момент прихода импульса фиксируется в памяти первого контроллера 2 в виде числа, равного количеству времени, прошедшего с начала сброса контроллера. Таким образом, по этим числам можно восстановить кинематическую диаграмму движения колонны в районе устья скважины, т.к. амплитуда и период колебательных движений колонны задается параметрами станка качалки, а фаза колебаний в виде момента прохождения верхней мертвой точки записывается в первом контроллере.
Импульсы от глубинного датчика перемещения 3, магниточувствительные элементы 4 которого последовательно срабатывают при прохождении мимо них кольцевого постоянного магнита 6, установленного на немагнитной вставке 5, через формирователь импульсов 7 поступают на входы второго контроллера 8. Формирователь импульсов 7 в зависимости от направления движения кольцевого постоянного магнита 6 распределяет их по двум каналам, причем на первый вход второго контроллера 8 поступают импульсы, соответствующие перемещению штанги глубинного насоса на определенное расстояние, равное расстоянию между магниточувствительными элементами 4, при движении кольцевого постоянного магнита 6 вверх, а на второй вход - такие же импульсы, но при движении вниз. Второй контроллер 8 фиксирует моменты прихода импульсов в памяти в виде числа, равного количеству времени, прошедшего с начала сброса контроллера. Следовательно, по этим числам можно восстановить кинематическую диаграмму (кинематограмму) движения колонны в районе плунжера глубинного штангового насоса с дискретностью, равной расстоянию между магниточувствительными элементами 4. Амплитуда колебаний плунжера в данной временной точке равна сумме пришедших импульсов с учетом направления движения штанги - при движении вверх импульсы суммируются, вниз - вычитаются.
Во время периодической профилактики после подъема колонны накопленные данные считываются из контроллеров в компьютер, визуализируются, и их анализ позволяет полностью определить перемещение, скорость, ускорение и характер движения глубинного штангового насоса относительно движения колонны на устье скважины, привязанный ко времени, косвенно оценивать нагрузки и деформации элементов привода.
Предложенное устройство контроля работы глубинного штангового насоса обладает гибкими функциональными возможностями, программа, записанная в контроллеры, позволяет проводить выборочную запись кинематограмм, привязанную к определенному моменту времени, производить первичную обработку информации, отбраковывать недостоверные результаты.
Кроме того, в данном устройстве полностью исключены помехи, возникающие в длинных кабельных линиях, которые могут значительно исказить результаты показаний глубинного датчика перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство соединения колонны штанг с наземным приводом | 2023 |
|
RU2812989C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ ГЛУБИННОГО ШТАНГОВОГО НАСОСА | 2001 |
|
RU2184844C1 |
| БЕСПРОВОДНОЙ ДИНАМОГРАФ ДЛЯ КОНТРОЛЯ РАБОТЫ СКВАЖИННЫХ ШТАНГОВЫХ НАСОСОВ | 2014 |
|
RU2546376C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИН И ШТАНГОВАЯ ГЛУБИННО-НАСОСНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2129652C1 |
| ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА ДЛЯ ВНУТРИСКВАЖИННОЙ ПЕРЕКАЧКИ ПЛАСТОВЫХ ВОД | 2007 |
|
RU2354848C1 |
| Способ передачи информации с глубинного прибора | 1990 |
|
SU1798491A1 |
| СПОСОБ И УСТРОЙСТВО НАГРЕВА НЕФТЕДОБЫВАЮЩЕЙ СКВАЖИНЫ С ШТАНГОВЫМ ГЛУБИННЫМ НАСОСОМ | 2005 |
|
RU2280153C1 |
| Способ передачи телеметрических сигналов при эксплуатации добывающих скважин штанговыми глубинными насосами и система для его реализации | 2022 |
|
RU2793933C1 |
| ВЫЧИСЛЕНИЕ СКВАЖИННЫХ ДИАГРАММ ПРИ ИСКРИВЛЕННЫХ СКВАЖИНАХ | 2012 |
|
RU2567567C1 |
| СТАНОК-КАЧАЛКА | 2010 |
|
RU2450161C2 |
Изобретение относится к нефтедобыче и предназначено для контроля технического состояния глубинного штангового насоса. Техническим результатом изобретения является упрощение устройства и повышение помехоустойчивости. Для этого устройство содержит глубинный датчик перемещения плунжера насоса на основе магниточувствительных элементов, равномерно расположенных на немагнитной вставке в колонну насосно-компрессорных труб над штангой глубинного насоса, кольцевой постоянный магнит, закрепленный на штанге в районе немагнитной вставки, и формирователь импульсов, связанный с глубинным датчиком перемещения. Дополнительно в устройство введены датчик верхней мертвой точки станка качалки, первый и второй контроллеры и устройство автономного питания. Первый контроллер установлен в районе устья скважины и его вход соединен с выходом датчика верхней мертвой точки. Второй контроллер установлен рядом с глубинным датчиком перемещения и его первый и второй входы связаны соответственно с первым и вторым выходами глубинного датчика перемещения через формирователь импульсов. Устройство автономного питания установлено рядом с глубинным датчиком перемещения и осуществляет электропитание глубинного датчика перемещения, второго контроллера и формирователя импульсов. В процессе установки устройства контроля глубинного штангового насоса перед началом спуска глубинного датчика перемещения проводят синхронизацию работы первого и второго контроллеров путем подачи сигнала "Сброс" на входы сброса контроллеров. 1 ил.
Устройство контроля работы глубинного штангового насоса, содержащее глубинный датчик перемещения плунжера насоса на основе магниточуствительных элементов, равномерно расположенных на немагнитной вставке в колонну насосно-компрессорных труб над плунжером глубинного насоса, кольцевой постоянный магнит, закрепленный на штанге в районе немагнитной вставки и формирователь импульсов, связанный с глубинным датчиком перемещения, отличающееся тем, что в него дополнительно введены датчик верхней мертвой точки станка качалки, первый и второй контроллеры и устройство автономного питания, причем первый контроллер установлен в районе устья скважины и его вход соединен с выходом датчика верхней мертвой точки, второй контроллер установлен рядом с глубинным датчиком перемещения и его первый и второй входы связаны соответственно с первым и вторым выходами глубинного датчика перемещения через формирователь импульсов, а устройство автономного питания установлено рядом с глубинным датчиком перемещения и осуществляет электропитание глубинного датчика перемещения, второго контроллера и формирователя импульсов, при этом в процессе установки устройства контроля глубинного штангового насоса перед началом спуска глубинного датчика перемещения проводят синхронизацию работы первого и второго контроллеров путем подачи сигнала сброс на входы сброса контроллеров.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ ГЛУБИННОГО ШТАНГОВОГО НАСОСА | 2001 |
|
RU2184844C1 |
| SU 1488457 A1, 23.06.1989 | |||
| Динамограф для контроля работы скважинных штанговых насосов | 1989 |
|
SU1686143A1 |
| Устройство контроля подачи продукции скважины в штанговых глубиннонасосных установках | 1990 |
|
SU1772348A1 |
| СПОСОБ КОНТРОЛЯ РАБОТЫ СКВАЖИНЫ, ОБОРУДОВАННОЙ ГЛУБИННЫМ НАСОСОМ | 1990 |
|
RU2011812C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ШТАНГОВЫХ ГЛУБИННЫХ НАСОСОВ | 1996 |
|
RU2097553C1 |
| УСТАНОВКА ДЛЯ ПОДЪЕМА ЖИДКОСТИ ИЗ СКВАЖИНЫ, СПОСОБ ЕЕ РАБОТЫ, СКВАЖИННЫЙ НАСОС И ГИДРОПРИВОД, ВХОДЯЩИЕ В ЕЕ СОСТАВ | 1997 |
|
RU2111343C1 |
| ДИНАМОГРАФ ДЛЯ КОНТРОЛЯ РАБОТЫ СКВАЖИННЫХ ШТАНГОВЫХ НАСОСОВ | 1996 |
|
RU2113619C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ ЭКСПЛУАТАЦИОННЫХ СКВАЖИН | 1998 |
|
RU2148709C1 |
| US 4143546 A, 13.03.1979 | |||
| US 4483188 A, 20.11.1984. | |||

