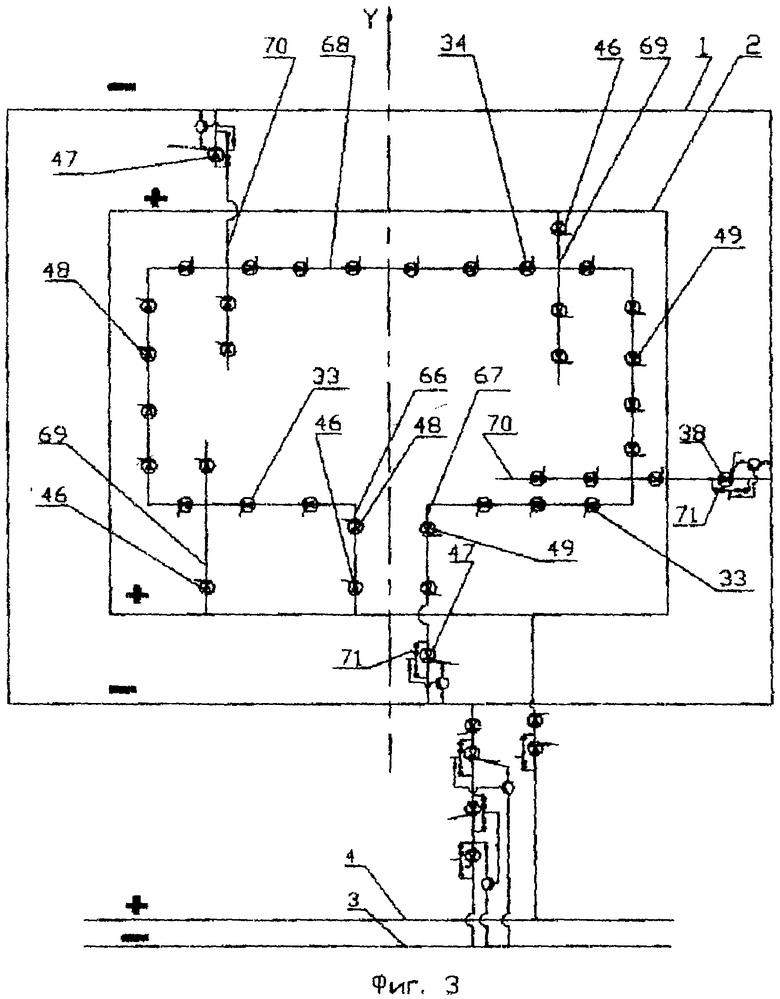
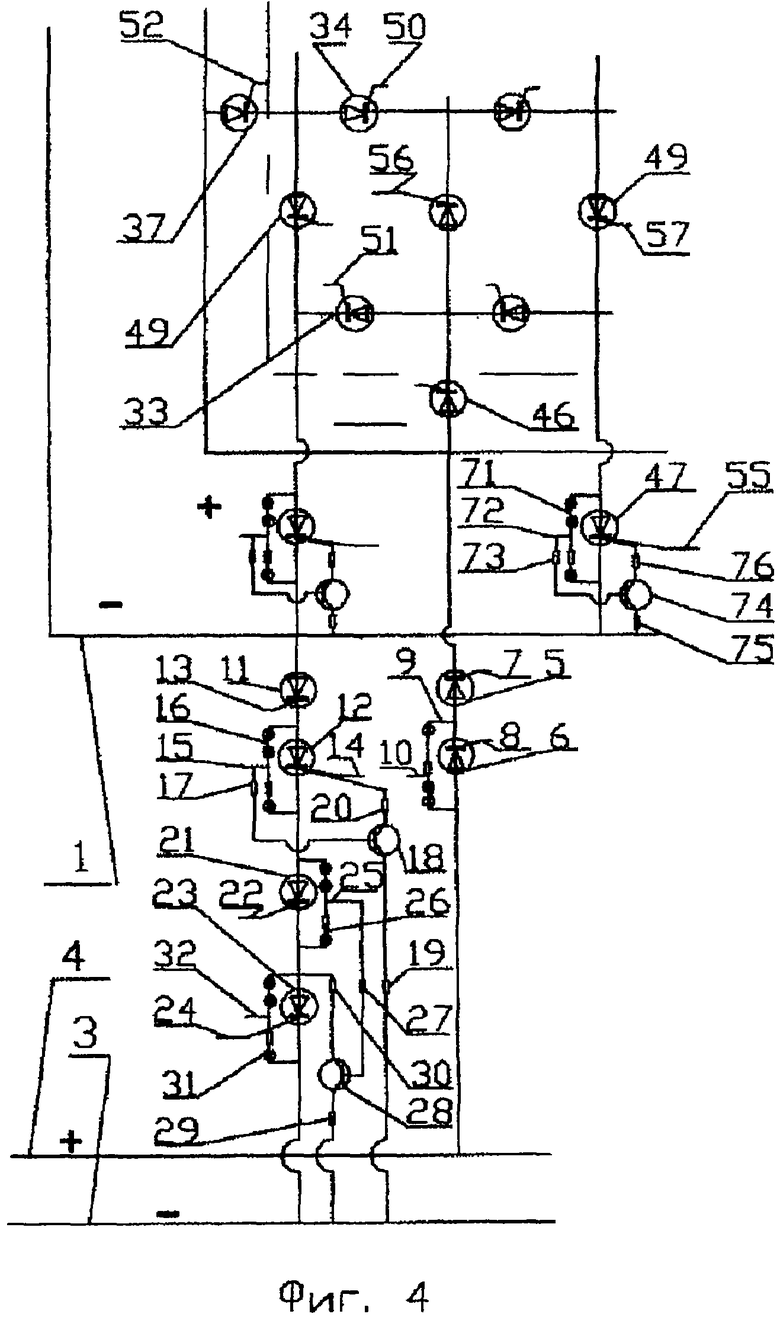
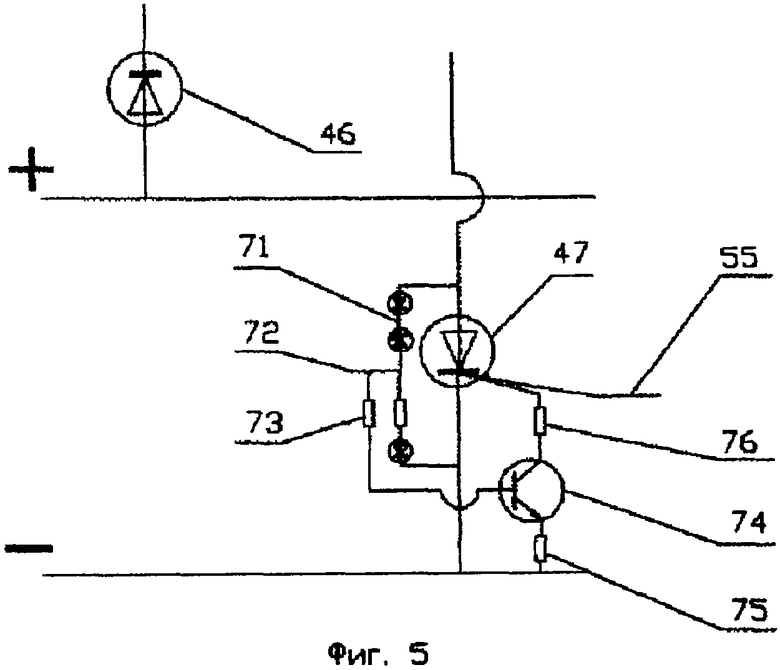
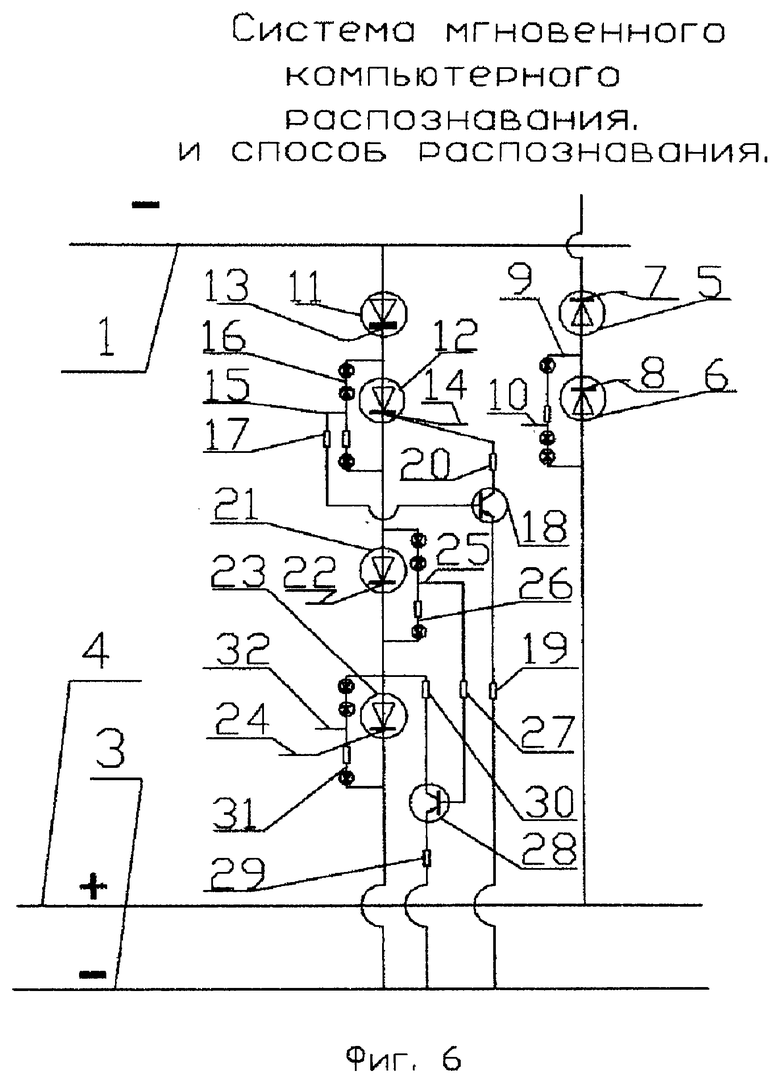
1. Система мгновенного компьютерного распознавания объектов (СМКРО), выполненная с возможностью записи, хранения, стирания, воспроизведения и распознавания информации, включающая в себя компьютер, считывающее устройство компьютера, устройство управления электронными приборами (УУЭП), управляемое компьютером, запоминающе-распознающий блок (ЗРБ) страниц памяти (СП), входные выводы которого подключены к выходным выводам УУЭП, а выходные - к считывающему устройству компьютера, отличающаяся тем, что каждая из ячеек СП ЗРБ, из которых на СП составляются замкнутые электрические цепи, контур протекающего по которым электрического тока максимально приближен к контуру изображения на экране монитора компьютера, образована тиристором, обладающим регулируемым сопротивлением, определяемым подачей управляющего импульса (УИ) на его управляющий электрод (УЭ), выводы которого выведены на обе стороны СП в узлах координатной сетки и соединены с аналогичными им выводами соседних плат, например, пайкой, входя в систему входных выводов ЗРБ, причем тиристоры ячеек СП, электроды которых находятся в узлах соответствующей им координатной сетки СП, соединены последовательно друг с другом участками проводимости, обладающими заданным сопротивлением, в узлах координатной сетки ячеек СП, расположенных посредине участков проводимости, соединяющих анод и катод каждой пары последовательно соединенных тиристоров ячеек, расположенных вдоль оси X, образуя строки ячеек СП из последовательно соединенных между собой тиристоров, число которых в каждой строке СП и шаг строк по оси Y постоянен, направление проводимости тиристоров в каждой отдельно взятой строке ячеек одинаково, но в смежных строках противоположно, а каждая строка ячеек СП соединена с соседними строками участками проводимости, расположенными вдоль оси Y, в тех узлах координатной сетки СП, в которых соединяются ячейки в строках СП, образуя столбцы электрически соединенных между собой ячеек СП.2. Система по п.1, отличающаяся тем, что постоянные положительные и отрицательные электрические шины платы СП располагаются вдоль всего периметра платы СП по ее периферии.3. Система по п.1, отличающаяся тем, что в участки проводимости столбцов ячеек СП между каждой смежной строкой ячеек СП вставлены тиристоры, аноды и катоды которых расположены в узлах соответствующей им координатной сетки СП и соединены с этими участками проводимости, в разрыв которых они вставлены таким образом, что длины участков от катода и анода тиристоров до точек их соединения в узлах координатной сетки с участками проводимости строк ячеек СП одинаковы, направление проводимости этих тиристоров в каждом отдельно взятом столбце СП одинаково, но направление проводимости этих тиристоров в смежных столбцах ячеек, начиная с первого, противоположно, управляющие электроды этих тиристоров (УЭТ) выведены в узлах соответствующих им координатной сетки на обе стороны платы СП и соединены с аналогичными им УЭТ соседних плат СП, например, пайкой, входя в систему входных выводов ЗРБ.4. Система по п.1, или 2, или 3, отличающаяся тем, что участки проводимости, соединяющие ячейки СП в столбцы СП, как и участки проводимости, соединяющие ячейки СП в строки СП, в начале и в конце каждого столбца СП и в начале и конце каждой строки СП соединены с постоянной положительной шиной СП, расположенной на одной из сторон СП, и постоянной отрицательной шиной платы СП, расположенной на противоположной стороне СП, в соответствии с направлением проводимости тиристоров в столбцах и строках СП через тиристоры, электроды каждого из которых расположены в узлах соответствующей им координатной сетки, направление проводимости которых при соединении столбцов СП с постоянными шинами СП совпадает с направлением проводимости тиристоров, вставленных в участки проводимости столбцов СП между каждой смежной строкой ячеек СП, а в строках СП - совпадает с направлением проводимости тиристоров в ячейках строк СП, обеспечивая протекание электрического тока через открытые тиристоры каждой отдельно взятой строки или столбца СП от постоянной положительной шины СП к отрицательной, анод этих тиристоров при соединении столбцов или строк СП с постоянной положительной шиной СП соединен с постоянной положительной шиной СП, катод - с участком проводимости подсоединяемого столбца или строки к постоянной положительной шине СП, катод этих тиристоров при соединении столбцов или строк СП с постоянной отрицательной шиной СП соединен с постоянной отрицательной шиной СП, анод - с участком проводимости подсоединяемого столбца или строки к постоянной отрицательной шине СП, а УЭТ выведены в узлах координатной сетки на обе стороны платы СП и соединены с аналогичными им УЭТ соседних плат СП, например, пайкой, входя в систему входных выводов ЗРБ.5. Система по п.1, отличающаяся тем, что постоянные положительные и отрицательные электрические шины платы СП соединены с общими шинами ЗРБ тиристорно-стабилитронными цепочками (ТСЦ), каждая из которых образована двумя соединенными последовательно тиристорами с одинаковым направлением проводимости - основным и вспомогательным, один из которых - вспомогательный - играет роль нагрузочного резистора, параллельно которому подключена стабилитронная цепочка СЦ, обладающими регулируемым, определяемым подачей УИ на УЭ этих тиристоров, сопротивлением, подключенными к постоянным положительным и отрицательным шинам СП, расположенным на одной из сторон СП, в точках соединения их с тиристорами пары смежных столбцов или строк ячеек СП, направление проводимости в которых противоположны, начиная, например, с первой пары столбцов на первой СП, сдвигая точки подключения на каждой последующей СП в сторону увеличения адресов столбцов и строк СП минимум на четыре шага столбцов или строк ячеек, соответственно, если, например, на первой СП ТСЦ подключены к первому и второму столбцу ячеек, то на второй СП они будут подключены к пятому и шестому столбцу ячеек и так далее, переходя потом при подключении очередных СП на боковые стороны СП и подключаясь к точкам соединения постоянных шин СП с тиристорами пары смежных строк ячеек, направление проводимости в которых противоположны, начиная с первой пары строк на данной СП, переходя затем опять на смежную СП и так далее, направление проводимости тиристоров ТСЦ совпадает с направлением проводимости тиристоров столбцов или строк ячеек, к которым они подсоединены, так, в одной из ТСЦ анод вспомогательного тиристора соединен с общей положительной шиной ЗРБ, катод основного тиристора соединен с точкой подключения тиристора столбца или строки ячеек к постоянной положительной шине СП, а во второй ТСЦ катод вспомогательного тиристора соединен с общей отрицательной шиной ЗРБ, а анод основного тиристора соединен с точкой подключения тиристора столбца или строки ячеек, в случае подключения ТСЦ к строке ячеек, к постоянной отрицательной шине СП, УЭ основного и вспомогательного тиристоров ТСЦ и выходные выводы стабилитронных цепочек (ВВСЦ) этих ТСЦ на каждой плате СП выведены на обе стороны платы в узлах периферийной координатной сетки, образуя две группы по три вывода в каждой, а в узлах той же периферийной координатной сетки каждой СП выполняются сквозные зоны проводимости, выходящие на обе стороны СП, расположенные в виде парных групп, каждая из которых сдвинута относительно предыдущей на шаг, равный шагу сдвига каждой пары ТСЦ на смежных СП, если, например, на первой СП такие группы расположены по адресам координатной сетки, соответствующим пятому и шестому, девятому и десятому и т.д. столбцу, то на второй СП эти группы будут расположены по адресам, соответствующим первому и второму, девятому и десятому, тринадцатому и четырнадцатому и т.д. столбцам, по три зоны проводимости в каждой группе, координаты которых в группе соответствуют координатам УЭТ и ВВСЦ вышеназванных ТСЦ и соединены с соответствующими им по положению на платах СП УЭТ, ВВСЦ и зонами проводимости соседних плат СП, например, пайкой, входя в систему входных и, соответственно, выходных выводов ЗРБ, а электроды тиристоров ТСЦ, как и точки подключения СЦ к вспомогательным тиристорам ТСЦ, находятся в узлах соответствующей им координатной сетки.6. Система по п.1 или 5, отличающаяся тем, что к вспомогательному тиристору ТСЦ, соединяющей постоянную отрицательную шину СП с общей отрицательной шиной ЗРБ, подключен транзистор типа n-p-n, выполняющий функцию обратной связи, соединенный с электрической схемой СП по схеме с общим эмиттером, база транзистора соединена с выходным выводом стабилитронной цепочки, параллельно подключенной к вышеназванному тиристору, эмиттер транзистора соединен с общей отрицательной шиной ЗРБ, а коллектор этого транзистора соединен с УЭ вспомогательного тиристора, образуя электронную цепочку, предназначенную для ограничения электрического тока, подающегося с общей шины ЗРБ на постоянную шину СП (ЭЦОТ), ВВСЦ вспомогательного тиристора ТСЦ в этом случае не выводится в узлах координатной сетки на обе стороны СП и не соединяется с другими СП, а электроды всех электронных приборов ТСЦ находятся в узлах соответствующей им координатной сетки.7. Система по п.1 или 5, отличающаяся тем, что постоянная положительная электрическая шина платы СП соединена с общей положительной шиной ЗРБ тиристорно-стабилитронной цепочкой, а постоянная отрицательная электрическая шина платы СП соединена с общей отрицательной шиной ЗРБ участком проводимости, ТСЦ и участок проводимости подключены к положительным и отрицательным шинам СП, расположенным на одной из сторон СП, в точках соединения их с тиристорами пары смежных столбцов или строк ячеек СП, направление проводимости в которых противоположны, начиная, например, с первой пары столбцов на первой СП, сдвигая точки подключения на каждой последующей СП в сторону увеличения адресов столбцов и строк СП минимум на четыре шага столбцов или строк ячеек, соответственно, если, например, на первой СП ТСЦ и участок проводимости подключены к первому и второму столбцу ячеек, то на второй СП они будут подключены к пятому и шестому столбцу ячеек и так далее, переходя потом на боковые стороны СП и подключаясь к точкам соединения постоянных шин СП с тиристорами пары смежных строк ячеек, направление проводимости в которых противоположны, начиная с первой пары строк на данной СП, переходя затем опять на смежную СП и так далее, направление проводимости тиристоров ТСЦ совпадает с направлением проводимости тиристоров столбцов или строк ячеек, к которым они подсоединены - анод вспомогательного тиристора соединен с общей положительной шиной ЗРБ, катод основного тиристора соединен с точкой подключения тиристора столбца или строки ячеек к постоянной положительной шине СП, а УЭ основного и вспомогательного тиристоров ТСЦ и выходной вывод стабилитронной цепочки (ВВСЦ) этой ТСЦ на каждой плате СП выведены на обе стороны платы в узлах периферийной координатной сетки, образуя группу из трех выводов, а в узлах той же периферийной координатной сетки каждой СП выполняются сквозные зоны проводимости, выходящие на обе стороны СП, расположенные в виде групп, сдвинутых друг относительно друга на шаг, равный шагу сдвига каждой ТСЦ на смежных СП, если, например, на первой СП такие группы расположены по адресам координатной сетки, соответствующим шестому, десятому и т.д. столбцу, то на второй СП эти группы будут расположены по адресам, соответствующим второму, десятому, четырнадцатому и т.д. столбцам, по три зоны проводимости в каждой группе, координаты которых в группе соответствуют координатам УЭТ и ВВСЦ ТСЦ и соединены с соответствующими им по положению на платах СП УЭТ, ВВСЦ и зонами проводимости соседних плат СП, например, пайкой, входя в систему входных и, соответственно, выходных выводов ЗРБ, а электроды тиристоров ТСЦ, как и точки подключения СЦ к вспомогательным тиристорам ТСЦ, находятся в узлах соответствующей им координатной сетки.8. Система по п.1, отличающаяся тем, что СЦ СП образованы из последовательно соединенных между собой 2-х диодов и резистора, последовательно соединенных со стабилитроном, направление проводимости диодов которой, расположенных по краям СЦ, совпадает с направлением проводимости тиристора, параллельно которому она подключается, и противоположно направлению прямой проводимости стабилитрона, расположенного вместе с резистором между диодами цепочки, а каждый ВВСЦ СП выведен между резистором, расположенным между анодами диода и стабилитрона, и анодом стабилитрона, выходит на обе стороны СП в узлах соответствующей ВВСЦ СП координатной сетки и соединен с аналогичными им выводами соседних плат, например, пайкой, входя в систему выходных выводов ЗРБ, а электроды всех электронных приборов СЦ, как и резистора, находятся в узлах соответствующей им координатной сетки.9. Система по п.1, отличающаяся тем, что к тиристорам, соединяющим столбцы и строки ячеек СП с постоянной отрицательной шиной СП, подключены транзисторы типа n-p-n, выполняющие функцию обратной связи, соединенные с электрической схемой СП по схеме с общим эмиттером, базы транзисторов соединены с выходными выводами стабилитронных цепочек, параллельно подключенных к вышеназванным тиристорам, эмиттеры транзисторов соединены с постоянной отрицательной шиной СП, коллекторы этих транзисторов подсоединены к УЭ тиристоров, к которым подключаются транзисторы, образуя электронные цепочки, предназначенные для ограничения электрического тока в цепях тиристоров строк и столбцов ячеек СП (ЭЦОТ), а электроды всех электронных приборов ЭЦОТ находятся в узлах соответствующей им координатной сетки.10. Система по п.1, или 5, или 9, отличающаяся тем, что в цепи ТСЦ, соединяющей постоянную отрицательную шину СП с общей отрицательной шиной ЗРБ, последовательно с катодом вспомогательного тиристора ТСЦ соединяется анод контрольного тиристора, катод контрольного тиристора последовательно соединен с анодом регистрирующего тиристора, катод регистрирующего тиристора соединяется с общей отрицательной шиной ЗРБ, а параллельно контрольному и регистрирующему тиристорам подключены СЦ в узлах соответствующей им координатной сетки, ВВСЦ контрольного тиристора подключен к базе транзистора типа n-p-n, эмиттер которого соединен с общей отрицательной шиной ЗРБ, а коллектор соединен с анодом регистрирующего тиристора, образуя электронную цепочку для сигнализации о произошедшем распознавании на данной СП (ЭЦСР), а УЭ контрольного и регистрирующего тиристоров и выходной вывод стабилитронной цепочки, подключенной параллельно регистрирующему тиристору, на каждой плате СП выведены на обе стороны платы в узлах соответствующей им периферийной координатной сетки, а в узлах той же периферийной координатной сетки каждой СП, выполняются сквозные зоны проводимости, выходящие на обе стороны СП, расположенные в виде групп из трех контактов зон проводимости, сдвинутых относительно друг друга на смежных СП на шаг, равный шагу сдвига пары ТСЦ, подключающих постоянные шины СП к общим шинам ЗРБ на смежных СП, если, например, на первой СП такие группы расположены по адресам координатной сетки, соответствующим петому, девятому и т.д. столбцу, то на второй СП эти группы будут расположены по адресам, соответствующим первому, девятому, тринадцатому и т.д. столбцам, по три зоны проводимости в каждой группе, координаты которых в группе соответствуют координатам УЭ контрольного и регистрирующего тиристоров и ВВСЦ регистрирующего тиристора, и соединены с соответствующими им по положению на платах СП УЭТ, ВВСЦ и зонами проводимости соседних плат СП, например, пайкой, входя в систему входных и, соответственно, выходных выводов ЗРБ.11. Способ распознавания объектов, включающий в себя запись, хранение, воспроизведение, стирание и компьютерное распознавание объектов по их контуру, формирование управляющих импульсов (УИ) устройства управления электронными приборами (УУЭП) - мощности, крутизны фронта, знака потенциала, длительности, подающихся на входные выводы запоминающе-распознающего блока (ЗРБ), соединенные с управляющими электродами тиристоров (УЭТ) страниц памяти (СП) ЗРБ системы мгновенного компьютерного распознавания объектов (СМКРО), программа которого предусматривает предварительное приведение изображения объекта, которое нужно распознать, к нормальному, стандартному для данного способа виду - преобразование изображения в контурное, изменению масштаба, повороту в требуемое положение, центрированию, вписыванию в прямоугольник требуемого размера, отличающийся тем, что для записи контура изображения на СП на экран монитора компьютера выводится одноцветный, нормализованный контур изображения, вписанный в стандартный для данной компьютерной программы распознавания прямоугольник, размеры которого в выбранном в программе распознавания СМКРО масштабе соответствуют размерам рабочей зоны с ячейками СП, выделенной программой распознавания для записи изображений, выполненный, например, на первом слое изображения, на который накладывается выполненное в другом слое и в другом цвете полупрозрачное изображение УЭТ электронных приборов электрической схемы СП, сквозь которое виден контур нормализованного записываемого изображения, и оператор с помощью специальной компьютерной программы, рассчитывающей координаты УЭ тиристоров, которые нужно открыть на СП, чтобы траектория движения тока через открытые тиристоры СП не выходила за контур запоминаемого изображения с минимальным отклонением от оси линии контура, образует на мониторе из изображений УЭ тиристоров строк и столбцов ячеек СП, соединенных друг с другом участками проводимости, контур электрической цепи, максимально приближенный к оси контура нормализованного изображения, выведенного на экран монитора, соединяет ее контурами временных шин, тоже образованных тиристорами строк и столбцов ячеек СП, с противоположным направлением проводимости каждой, соединяющейся с соответствующей ее направлению проводимости постоянной положительной или отрицательной шиной СП, образуя замкнутую электрическую цепь между постоянными шинами СП и контуром электрической цепи, максимально приближенного к контуру изображения, с требующимся направлением тока в ней, для чего выделяет соответствующим цветом, предназначенным для этого программой распознавания СМКРО, УЭТ строк и столбцов ячеек, образующих временные шины, начиная с выбранных оператором точек соединения участков проводимости столбцов временных шин с участками проводимости ячеек контура изображения, УЭТ, соединяющего временную шину с постоянной положительной шиной СП, УЭТ электронной цепочки ограничения тока (ЭЦОТ), через которую временная шина соединяется с постоянной отрицательной шиной СП, УЭТ тиристорно-стабилитронных цепочек (ТСЦ) с УЭТ ЭЦОТ и электронной цепочки сигнализации распознавания (ЭЦСР) и изображение контакта, служащего для подачи на общие шины ЗРБ импульса повышенного напряжения, удаляя с экрана все другие изображения контактов УЭТ, включая и УЭТ строк и столбцов ячеек СП, входящих в контур изображения на СП и расположенных между точками подключения к контуру изображения на СП временных шин, а параметры управляющих импульсов (УИ), создаваемых УУЭП и посылаемых на входные выводы ЗРБ как для записи изображения на СП, так и для распознавания объекта, достигаются за счет регулирования программой компьютерного распознавания СМКРО энергии электронных лучей электронных прожекторов УУЭП и времени облучения - экспозиции контактов мишени электронно-лучевой трубки УУЭП, координаты которых программа распознавания СМКРО при записи контура изображения на СП определяет из программы вывода выделенных оператором изображений контактов УЭТ на экран монитора, зная координаты пикселов, образующих изображения этих контактов, определяет координаты их центров, которые соответствуют координатам центров контактов УУЭП, а для распознавания объекта - определяет из программы вывода на экран монитора нормализованного контура изображения распознаваемого объекта, зная координаты пикселей контура изображения на экране монитора и рассчитывая координаты УЭ тиристоров на СП, которые нужно открыть, чтобы траектория движения электрического тока по открытым тиристорам СП не выходила за контур изображения на экране монитора, с минимальным отклонением от оси контура изображения, а потенциал УИ, посылаемых УУЭП на входные выводы ЗРБ при записи контура изображения на СП, соответствующие УЭТ контура изображения, УЭТ контура временных шин, УЭТ ТСЦ и контакту УУЭП, на котором вырабатывается импульс повышенного напряжения, подаваемого на общие шины ЗРБ одновременно со всеми остальными, является положительным, приводящим к открытию тиристоров контура электрической цепи на данной СП, что и означает запись, и сохраняется в памяти СП до подачи закрывающего импульса отрицательного потенциала на УЭТ основного тиристора той или другой ТСЦ данной СП.12. Способ по п.11, отличающийся тем, что компьютерная программа распознавания СМКРО при записи графического изображения на СП в качестве сигнала для определения требующихся параметров УИ: мощности, крутизны фронта, знака потенциала, длительности, подающихся на УЭТ СП, использует цвет изображения контактов УЭТ на экране монитора.13. Способ по п.11, отличающийся тем, что формирование параметров УИ, подающихся на управляющие электроды (УЭ) как отдельных тиристоров, так и участка - группы соединенных в электрическую цепь тиристоров, на которые программой распознавания СМКРО разбивается длинная электрическая цепочка открываемых тиристоров, осуществляется под управлением программы распознавания СМКРО в зависимости от требующегося времени экспозиции, требующейся мощности УИ и длины цепочки открываемых тиристоров ячеек СП как одним, так и одновременно несколькими электронными лучами группы электронных прожекторов УУЭП, причем каждый электронный прожектор или каждая группа электронных прожекторов может облучать свой участок контактов УУЭП, соединенных с УЭ требующих открытия тиристоров СП.14. Способ по п.11, отличающийся тем, что электронный луч электронного прожектора или группы прожекторов УУЭП может многократно облучать под управлением программы распознавания СМКРО выделенный ему программой участок контактов УУЭП, соединенных с УЭ требующих открытия тиристоров СП, имея возможность перемещаться от одного облучаемого контакта мишени УУЭП к другому, двигаясь построчно вдоль строк контактов, или по кратчайшему пути между ними, в результате воздействия которого инжектируется за каждый проход электронного луча определенная порция электронов в открываемые тиристоры, объемный заряд от которых не должен полностью рассасываться до повторной инжекции, постепенно готовя к открытию длинную цепочку последовательно соединенных тиристоров и обеспечивая требующиеся параметры УИ, подаваемых на УЭТ.15. Способ по п.11, отличающийся тем, что программа распознавания СМКРО определяет адрес СП, на которой произошло распознавание объекта при использовании для распознавания УИ положительного потенциала или произошло короткое замыкание, по увеличению величины тока в ТСЦ, соединяющей постоянную положительную шину данной СП с общей положительной шиной ЗРБ, по сравнению с номинальным значением, и, как следствие, пробою стабилитрона в СЦ, подключенной параллельно вспомогательному тиристору этой ТСЦ и появлению потенциала на выходном выводе ее стабилитронной цепочки (ВВСЦ) и, значит, на выходном выводе ЗРБ, соответствующего адресу данной СП.16. Способ по п.11, отличающийся тем, что компьютерная программа распознавания СМКРО может создавать и перемещать в процессе распознавания объекта по его фрагменту одну или несколько пар передвижных временных шин (ПВШ), одна из шин в каждой паре подключена к положительной постоянной шине СП, а другая - к отрицательной, образованных, как и временные шины СП, участками проводимости столбцов или строк ячеек СП, с открытыми тиристорами этих участков в столбцах и открытыми тиристорами ячеек этих строк СП, число которых определяет длину этих шин, соединяющихся с соответствующими проводимости их тиристоров знаку потенциала постоянными шинами СП тоже через открытые тиристоры, адреса подключения которых к постоянным шинам СП не используются на СП ЗРБ для подключения ТСЦ, соединяющих постоянные шины СП с общими шинами ЗРБ, и временных шин, подключающих контур изображения к постоянным шинам СП, периодически закрывая тиристоры, образующие ПВШ по одним адресам столбцов или строк, подавая на их УЭ закрывающие импульсы отрицательного потенциала, соответствующей их типу мощности и длительности, и открывая аналогичные тиристоры в других столбцах или строках с аналогичным направлением проводимости тиристоров столбца или строки, к которым тоже не подключаются ТСЦ и временные шины на СП ЗРБ, подавая на их УЭТ УИ положительного потенциала, передвигая тем самым ПВШ на СП на шаг, кратный шагу столбцов ячеек или строк, не замыкающихся друг с другом при любых передвижениях шин, подключенных к разноименным постоянным шинам СП, расположенным как на одной стороне СП, так и на смежных и противоположных, отсекающих от контура изображения шаблона фрагменты изображения и подсоединяя их, в свою очередь, через себя к постоянным шинам СП, расположенных на СП таким образом, чтобы в отсеченных частях контура изображения сохранялось прежнее направление электрического тока, причем ПВШ, входящие в пару, могут передвигаться под управлением программы распознавания как синхронно в одном направлении, так и в противоположных, изменяя, тем самым, размеры фрагментов контура изображения шаблонов, подключенных к ПВШ, а направление движения электрического тока в контурах изображений на всех СП ЗРБ в случае использования ПВШ должно быть одинаковым, например, по часовой стрелке, а временные шины, подключающие контур изображения на всех СП ЗРБ к постоянным шинам СП, в этом случае располагаются симметрично относительно оси симметрии СП, направленной, например, вдоль оси Y.17. Способ по п.11, отличающийся тем, что программа распознавания СМКРО в процессе распознавания выводит изображение нормализованного распознаваемого объекта на экран монитора, периодически поворачивая его в пределах, допускаемых программой распознавания, и снова вписывая его после поворота в стандартный для программы распознавания прямоугольник, относительно осей, расположение которых в пространстве периодически, по заданному в программе распознавания алгоритму меняется в пределах допуска, а в паузах между изменением положения распознаваемого объекта производит распознавание объекта, для чего выводит на экран монитора кадры с измененными координатами изображений, которые определяются программой распознавания СМКРО из программы вывода изображения распознаваемого объекта на экран монитора, вырабатываются сигналы распознавания, образуемые под управлением компьютера в УУЭП, и посылаются на входные выводы ЗРБ, адреса которых соответствуют координатам изображения распознаваемого объекта на экране монитора, для распознавания объекта.18. Способ по п.11, отличающийся тем, что изображение контура или только фрагмента контура, или совокупности контуров или только фрагментов контуров распознаваемого объекта, выводимого для распознавания на экран монитора, может осциллировать относительно заданных программой распознавания СМКРО осей с заданной в программе относительно каждой из осей амплитудой и частотой как одновременно всей совокупностью контуров, так и каждым контуром независимо один от другого, а программа распознавания для процесса распознавания с заданной в программе распознавания периодичностью выводит на экран монитора кадры с измененными координатами изображений, которые определяются программой распознавания СМКРО из программы вывода изображения распознаваемого объекта на экран монитора, вырабатываются сигналы распознавания, образуемые под управлением компьютере в УУЭП, и посылаются на входные выводы ЗРБ, адреса которых соответствуют координатам распознаваемого изображения объекта на экране монитора, для распознавания объекта.19. Способ по п.11, отличающийся тем, что радиус-вектор, соединяющий каждую точку изображения контура или только фрагмента контура, или совокупности контуров или только фрагментов контуров распознаваемого объекта с заданной программой распознавания СМКРО точкой, может осциллировать в заранее установленных в программе распознавания пределах и с заданной частотой как одновременно у всей совокупности контуров, так и у каждого контура независимо от других, а величина осцилляции радиус-вектора может задаваться в процентах от его текущего или среднего размера.20. Способ по п.11, отличающийся тем, что для распознавания объекта по фрагменту его изображения масштаб изображения распознаваемого фрагмента пошагово изменяется от максимально возможного, определяемого стандартным размером прямоугольника программы распознавания СМКРО, в который в данном случае вписывается изображение фрагмента распознаваемого объекта, до минимального, заранее заданного в программе распознавания СМКРО, с шагом изменения, также заданным в программе распознавания, но без изменения ширины линии контура изображения, назначаемой программой распознавания СМКРО с учетом возможности создания на СП контура тока через открытые тиристоры СП, вписывающегося в линию контура распознаваемого объекта на экране монитора, и после каждого изменения масштаба изображение фрагмента распознаваемого объекта по заданному в программе распознавания алгоритму, пошагово, как поступательно, так и периодически поворачиваясь на заданный программой угол, построчно, с заданным в программе распознавания шагом построчного смещения, в шахматном или случайном порядке по заданному в программе алгоритму передвигается в границах стандартного для программы распознавания прямоугольника, а программа распознавания в паузах между изменением координат и масштаба фрагмента изображения производит распознавание объекта, выводя для этого на экран монитора кадры с измененными координатами изображении, которые определяются программой распознавания СМКРО из программы вывода изображения распознаваемого объекта на экран монитора, вырабатываются сигналы распознавания, образуемые под управлением компьютера в УУЭП, и посылаются на входные выводы ЗРБ, координаты которых соответствуют координатам фрагмента распознаваемого объекта на экране монитора, для распознавания объекта.21. Способ по п.11, или 16, или 17, или 18, или 19, отличающийся тем, что для распознавания фрагмента объекта для каждого возможного, заранее заданного в программе распознавания места расположения системы ПВШ, масштаб изображения распознаваемого фрагмента пошагово изменяется от максимально возможного, определяемого стандартным размером прямоугольника программы распознавания СМКРО, в который в данном случае вписывается распознаваемый фрагмент изображения, до минимального, заранее заданного в программе распознавания, с шагом изменения, также заданным в программе распознавания, но без изменения ширины линии контура изображения, назначаемой программой распознавания СМКРО с учетом возможности создания на СП контура тока через открытые тиристоры СП, вписывающегося в линию контура распознаваемого объекта на экране монитора, и после каждого изменения масштаба изображение фрагмента распознаваемого объекта по заданному в программе распознавания алгоритму, пошагово, как поступательно, так и периодически поворачиваясь на заданный программой угол, построчно, с заданным в программе распознавания шагом построчного смещения, в шахматном или случайном порядке по заданному в программе алгоритму передвигается в границах стандартного для программы распознавания прямоугольника, с фиксированным для данного масштаба изображения фрагмента местом расположения ПВШ, а программа распознавания в паузах между изменением координат, масштаба фрагмента изображения и места расположения системы ПВШ производит распознавание объекта, выводя для этого на экран монитора кадры с измененными координатами изображения фрагмента распознаваемого объекта на экране монитора, которые определяются программой распознавания СМКРО из программы вывода этого изображения фрагмента распознаваемого объекта на экран монитора, вырабатываются сигналы распознавания, образуемые под управлением компьютера в УУЭП, и посылаются с некоторой задержкой после изменения положения ПВШ, требующейся для стабилизации тока на СП, на входные выводы ЗРБ, адреса которых соответствуют координатам распознаваемого объекта на экране монитора, для распознавания объекта.22. Способ по п.11, отличающийся тем, что при распознавании фрагмента изображения объекта программа распознавания СМКРО случайным образом изменяет масштаб изображения фрагмента изображения, его положение в стандартном для программы распознавания прямоугольнике, положение системы ПВШ и в паузах между изменением координат, масштаба фрагмента изображения и положения ПВШ производит распознавание объекта, выводя для этого на экран монитора кадры с измененными координатами изображения фрагмента распознаваемого объекта, которые определяются программой распознавания СМКРО из программы вывода этого изображения фрагмента распознаваемого объекта на экран монитора, вырабатываются сигналы распознавания, образуемые под управлением компьютера в УУЭП, и посылаются с некоторой задержкой после изменения положения ПВШ, требующейся для стабилизации тока на СП, на входные выводы ЗРБ, адреса которых соответствуют координатам фрагмента распознаваемого объекта на экране монитора, для распознавания объекта.