Изобретение относится к области микромеханики, в частности к микромеханическим гироскопам (ММГ) вибрационного типа и схемам подстройки параметров колебательных контуров подвеса в этих гироскопах.
В ММГ подвижная масса (ПМ) крепится к основанию с помощью, по крайней мере, двухосного резонансного подвеса. Резонансная частота подвеса по оси первичных колебаний выбирается ниже резонансной частоты подвеса по оси вторичных колебаний. Возможны режимы работы ММГ как с совпадением резонансных частот подвеса, так и работа с малым сдвигом резонансных частот этих подвесов. В обоих случаях подстройка резонансных частот осуществляется за счет использования так называемой отрицательной жесткости и достигается путем подачи напряжения определенной величины на электроды, которые располагаются на оси вторичных колебаний. Пример реализации такой подстройки приведен на стр.412-413 в книге Распопов В.Я. Микромеханические приборы, 2-е издание. Тул. Гос. Университет, Тула, 2004 г., 475 стр. А пример работы ММГ с расстройкой резонансных частот подвесов приведен на стр.451 рис.5.5.3. этой книги.
В работе [Пешехонов В.Г. и др. Результаты разработки микромеханического гироскопа. XII Санкт-Петербургская международная конференция по интегрированным навигационным системам 23-25 мая 2005 г., стр.268-274] описан ММГ RR-типа, в котором для управления используются электроды, расположенные на крышке. Эти же электроды могут использоваться для сведения резонансных частот подвесов, как это было предложено в пат. США №6067858.
ММГ, в котором осуществляется подстройка резонансной частоты подвеса по оси вторичных колебаний путем подачи напряжений на соответствующие электроды, описан в пат. США №6067858 (см. fig 23, колонка 22 описания).
Способ подстройки резонансной частоты подвеса по оси вторичных колебаний в ММГ RR- типа и сам ММГ описаны в пат. США №6553833.
Этот способ заключается в формировании напряжений на электродах, расположенных по оси вторичных колебаний, причем для формирования указанного напряжения формируют два дополнительных сигнала, частоты которых отличаются на величины +Δf и -Δf от F1 частоты, с которой колеблется ПМ, которые подаются на электроды, расположенные по оси вторичных колебаний. Эти дополнительные сигналы вызывают колебания ПМ по оси вторичных колебаний соответственно с частотами F1±Δf. Если резонансная частота подвеса по оси вторичных колебаний совпадает с частотой F1, то амплитуды колебаний ПМ на частотах F1±Δf равны, если же, например, резонансная частота подвеса по оси вторичных колебаний выше F1, то амплитуда колебаний ПМ на частоте F1+Δf оказывается больше, чем F1-Δf. Как указано в абзацах 60-65 столбца 4 описания патента величина Δf может составлять 100 Гц. Далее в соответствии с описанным в патенте способом путем детектирования выделяют амплитуды сигналов этих частот, получаемых на выходе преобразователя емкость - напряжение 2 (см. фиг.3 описания), и в зависимости от разности выделенных амплитуд формируют напряжения. Для подстройки резонансной частоты изменяют величины формируемых напряжений до тех пор, пока амплитуды указанных сигналов не сравняются.
Устройство, в котором реализован описанный способ подстройки резонансной частоты подвеса по оси вторичных колебаний, приведено на фиг.3 описания к патенту США №6553833. Оно представляет собой микромеханический гироскоп, содержащий подвижную массу на двухосном резонансном подвесе, первый емкостной датчик перемещения ПМ, образованный электродами, расположенными на оси первичных колебаний, и первым интерфейсным устройством (преобразователь C/U 10 на фиг.3), входы которого соединены с этими электродами, второй емкостной датчик перемещения ПМ, образованный электродами, расположенными на оси вторичных колебаний, и вторым интерфейсным устройством (преобразователь C/U 2 на фиг.3), входы которого соединены с этими электродами, электроды, расположенные по оси вторичных колебаний, синхронный демодулятор (7), генератор тестовых сигналов (6), выход которого через схему формирования напряжения (9) соединен с электродами, расположенными на оси вторичных колебаний. ММГ содержит также адаптивный компенсатор квадратуры (8), обеспечивающий снижение или подавление квадратурной помехи.
Способ подстройки резонансной частоты подвеса по оси вторичных колебаний в ММГ и ММГ, в котором используется способ, описанные в пат. США №6553833, приняты в качестве прототипа.
Таким образом, для подстройки резонансной частоты в прототипе вводят два дополнительных сигнала, вызывающих перемещение ПМ по оси вторичных колебаний, оценивают обусловленные этими сигналами перемещения ПМ, на основе полученной оценки путем изменения напряжения на электродах добиваются совпадения резонансных частот подвеса. При этом в прототипе осуществляется подавление квадратурной составляющей перемещений ПМ.
К недостаткам способа-прототипа следует отнести сложность для реализации подстройки резонансной частоты подвеса ПМ в ММГ, обусловленной тем, что в устройство-прототип необходимо вводить дополнительные источники сигналов, частоты которых должны быть привязаны к резонансной частоте подвеса по оси первичных колебаний, и дополнительные демодуляторы для выделения этих сигналов. Кроме того, наличие дополнительных сигналов в высокодобротной системе, которой является подвес ПМ, приводит к возбуждению колебаний на частоте этих сигналов, что сужает динамический диапазон работы ММГ и уменьшает точность его работы. Кроме того, критерием точной подстройки резонансной частоты является равенство амплитуд сигналов низкого уровня, что ограничивает точность этой подстройки. Наличие шумов и помех в канале усиления и преобразования сигналов контура вторичных колебаний ухудшает эту точность. Увеличение же амплитуд тестовых сигналов для повышения точности подстройки за счет увеличения отношения сигнал/шум может привести к большим возмущениям ПМ от вспомогательных тестовых сигналов и, в конечном счете, к ухудшению точности ММГ.
Недостатки прототипа-устройства: недостаточно высокая точность и высокая сложность электронной части обусловлены примененным в нем способом подстройки резонансной частоты.
Задачей изобретения является увеличение точности подстройки резонансной частоты подвеса ПМ ММГ по оси вторичных колебаний. Кроме того, задачей изобретения является повышение точности ММГ и упрощение его конструкции.
Поставленная задача достигается тем, что для формирования напряжения на электродах, используемого при подстройке резонансной частоты, определяют среднюю составляющую произведения сигналов датчиков перемещения подвижной массы по осям первичных и вторичных колебаний и изменяют формируемое напряжение до тех пор, пока полученная средняя составляющая произведения не станет равной нулю
Кроме того, поставленная задача достигается тем, что в ММГ, содержащем подвижную массу на двухосном резонансном подвесе, первый емкостной датчик перемещения подвижной массы, образованный первой парой электродов, расположенных на оси первичных колебаний, и первым устройством выделения разности токов, протекающих через первую пару электродов, входы которого соединены с первой парой электродов, второй емкостной датчик перемещения подвижной массы, образованный второй парой электродов, расположенных на оси вторичных колебаний, и вторым устройством выделения разности токов, протекающих через вторую пару электродов, входы которого соединены со второй парой электродов, дополнительные электроды, расположенные по оси вторичных колебаний, введены последовательно соединенные второй фазовый детектор, суммирующее устройство и интегратор, при этом входы фазового детектора соединены с выходами емкостных датчиков, а выход с одним входом суммирующего устройства, ко второму входу которого подключен источник постоянного напряжения, выход суммирующего устройства соединен с входом интегратора, выход которого соединен, по крайней мере, с одним из дополнительных электродов.
По существу, в предложенном способе вместо двух тестовых сигналов, которые используются в прототипе, в качестве тестового используется сигнал квадратурной помехи. Благодаря вносимому резонансным контуром сдвигу фазы на 90° на резонансной частоте квадратурная помеха при совпадении резонансных частот оказывается ортогональна к сигналу датчика перемещения ПМ по оси первичных колебаний. При заданном нулевом значении произведения этих ортогональных сигналов достигается точная подстройка резонансных частот. Благодаря тому, что определение расстройки резонансных частот определяется по разности фаз, и благодаря тому, что фазовая характеристика высокодобротного контура имеет большую крутизну, в предложенном способе достигается более высокая точность подстройки резонансных частот. А благодаря тому, что в качестве тестового сигнала используется квадратурная помеха, которая уже присутствует в ММГ, достигается упрощение конструкции ММГ. Дополнительным эффектом, обеспечивающим повышение точности ММГ, является и то, что за счет подстройки резонансной частоты обеспечивается подстройка фазы опорного сигнала по отношению к полезному (составляющая, обусловленная действием кориолисова ускорения). Это приводит к более точному выделению полезного сигнала и подавлению квадратурной помехи при выделении полезного сигнала с помощью фазового детектора.
Реализация предложенного способа требует введения только трех дополнительных элементов: фазового детектора, суммирующего устройства и интегратора, а по существу двух, простых в реализации элементов фазового детектора и усилителя, т.к. суммирование сигналов можно получить и в усилителе, который при введении обратной связи с помощью конденсатора может быть преобразован в интегратор.
Заявленные способ и устройство поясняются чертежами.
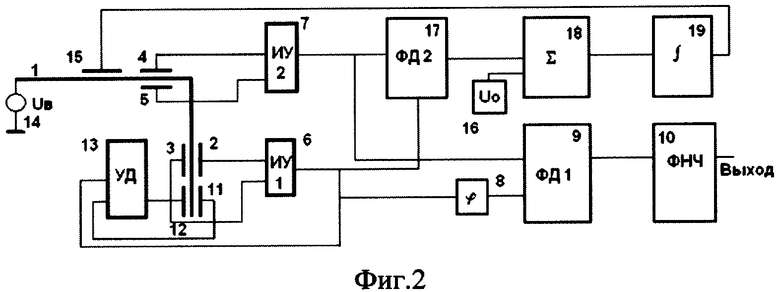
На фиг.1 приведены амплитудно-частотная и фазово-частотная характеристики (АЧХ и ФЧХ) резонансного подвеса по оси вторичных колебаний.
На фиг.2 приведена блок-схема ММГ.
На фиг.2 приняты следующие обозначения:
1 - ПМ
2,3 - первая пара электродов, расположенных по оси первичных колебаний
4,5 - вторая пара электродов, расположенных по оси вторичных колебаний
6,7 - первое и второе устройства выделения разности токов, протекающих соответственно через первую и вторую пары электродов
8 - фазосдвигающее устройство
9 - фазовый детектор
10 - фильтр низкой частоты (ФНЧ)
11,12 - электроды гребенчатого двигателя
13 -устройство управления гребенчатым двигателем
14 - генератор переменного напряжения
15 - дополнительный электрод, расположенный по оси вторичных колебаний
16 - источник постоянного напряжения
17 - второй фазовый детектор
18 - суммирующее устройство
19 - интегратор
Предлагаемый способ заключается в следующем.
На фиг.1. (верхняя часть) приведена АЧХ резонансного подвеса ПМ ММГ по оси вторичных колебаний для двух разных значений добротности (Q1 и Q2, Q1≥Q2).
АЧХ, соответствующая меньшему значению Q (Q2), изображена тонкой линией. На нижней части фиг.1 приведены ФЧХ, соответствующие указанным значениям добротности (Q1 и Q2). Возможны три случая работы ММГ: когда частота первичных колебаний ПМ (или частота, с которой работает драйв) Fd меньше резонансной частоты подвеса ПМ ММГ по оси вторичных колебаний Fp (случай Fd1), больше (случай Fd2) и равен этой частоте.
Соответственно этим случаям, как видно из графика для ФЧХ, вносимый подвесом фазовый сдвиг будет меньше 90°, больше 90° или равен 90°. На ПМ по оси вторичных колебаний действуют силы, одна из которых обусловлена действием кориолисового ускорения, а другая обусловлена технологическими погрешностями изготовления, вызывающими появление квадратурной помехи. Квадратурная помеха при нулевом фазовом сдвиге, вносимом резонансным подвесом ПМ ММГ по оси вторичных колебаний (т.е. при Fd, значительно меньшем резонансной частоты, например, значение Fd1 для Q2, как это показано на графике ФЧХ), синфазна с сигналом на выходе датчика перемещения ПМ по оси первичных колебаний. Выходным сигналом датчика перемещения ПМ по оси вторичных колебаний при неподвижном ММГ является квадратурная помеха. При перемножении сигналов датчиков перемещения подвижной массы по осям первичных и вторичных колебаний при неподвижном ММГ и выделении средней составляющей значения последней будут зависеть от положения Fd относительно резонансной частоты подвеса ПМ ММГ по оси вторичных колебаний Fp.
В соответствии с тремя рассмотренными выше случаями величина этой средней составляющей будет больше, меньше и равна нулю. Поэтому, увеличивая напряжение на электродах, расположенных по оси вторичных колебаний (или хотя бы на одном из них), можно за счет явления "отрицательной жесткости" уменьшить резонансную частоту подвеса ПМ ММГ по оси вторичных колебаний и прийти к случаю, когда частота Fp сравняется с Fd1. Стрелкой на верхней части фиг.1 показано направление движения резонансной частоты Fp в сторону Fd1. Для второго случая при отрицательном значении средней составляющей произведения сигналов напряжение на электродах, расположенных по оси вторичных колебаний, уменьшается и резонансная частота подвеса ПМ ММГ по оси вторичных колебаний возрастает. Стрелкой на нижней части фиг.1 показано направление движения резонансной частоты Fp в сторону Fd2. И в первом, и во втором случаях изменение напряжения на электродах до достижения средней составляющей нулевого значения приводит к точной настройке резонансной частоты подвеса ПМ ММГ по оси вторичных колебаний на частоту Fd, т.е. на частоту, с которой происходят первичные колебания, которые выбираются равными резонансной частоте подвеса ПМ ММГ по оси первичных колебаний. Если же резонансные частоты совпадают (третий случай), то напряжение на электродах не изменяют.
Таким образом, показано, что без введения в ММГ дополнительных сигналов, используя только сигнал квадратурной помехи, возможна настройка резонансной частоты подвеса ПМ ММГ по оси вторичных колебаний Fp на частоту Fd. Отметим, что предложенный способ может быть применен в ММГ, в которых не вводятся специальные меры (например, такие, как двухмассовый подвес, или введение в конструкцию механических ограничителей перемещений ПМ по ортогональной оси, как это сделано в ММГ ф. Analog Devices ADXRS150) по подавлению квадратурной помехи. Отметим дополнительные преимущества предложенного способа. Благодаря точной настройке резонансных частот подвесов ПМ опорный сигнал демодулятора, выделяющего сигнал о кориолисовом ускорении, оказывается точно в фазе с несущей кориолисового ускорения, что обеспечивает максимальный коэффициент передачи демодулятора по полезному сигналу и полное подавление квадратурной помехи.
В блок-схеме ММГ, в котором реализован предложенный способ, на фиг.2, с двух сторон ПМ 1 по оси первичных колебаний расположены пара электродов 2, 3, по оси вторичных колебаний - пара электродов 4, 5. Первое и второе устройства выделения разности токов, протекающих через пары электродов (соответственно 6 и 7) подключены входами соответственно к первой паре электродов 2, 3 и второй паре электродов 4, 5. Выход первого устройства выделения разности токов 6 через фазосдвигающее устройство 8 соединен с одним из входов фазового детектора 9. Выход фазового детектора 9 соединен с входом ФНЧ 10, выход которого является выходом ММГ. Выход второго устройства выделения разности токов 7 соединен с другим входом фазового детектора 9. Выход первого устройства выделения разности токов 6 соединен с входом устройства управления гребенчатым двигателем 13, выходы которого соединены с электродами гребенчатого двигателя, расположенными по оси первичных колебаний ПМ 1. С ПМ 1 соединен выход генератора переменного напряжения 14. Дополнительный электрод 15 расположен по оси вторичных колебаний. Последовательно соединенные введенный второй фазовый детектор 17, суммирующее устройство 18 и интегратор 19 включены между выходом второго устройства выделения разности токов 7 и выводом электрода 15. Выход источника постоянного напряжения 16 соединен с одним из входов суммирующего устройства 18.
ММГ работает следующим образом.
Генератор переменного напряжения 14 создает напряжения между ПМ 1 и электродами 2-5, через которые протекает ток, зависящий от величин емкостей конденсаторов, образованных этими электродами и ПМ 1. Устройства выделения разности токов 6, 7 выделяют разности токов, протекающих через пары электродов 2, 3 и 4, 5. Выделенные разности токов пропорциональны перемещениям ПМ 1 по соответствующим осям. Таким образом, устройства выделения разности токов 6, 7 совместно с парами электродов 2, 3 и 4, 5 образуют соответственно емкостные датчики перемещения ПМ 1 по оси первичных и вторичных колебаний. Первое устройство выделения разности токов 6 совместно с устройством управления гребенчатым двигателем 13, парой электродов 2, 3 и 11, 12, и ПМ 1 на резонансном подвесе формируют автоколебательный контур, в котором возникают колебательные движения ПМ 1 по оси первичных колебаний. Под действием кориолисовых ускорений ПМ 1 может колебаться с частотой первичных колебаний или, как иногда говорят, с частотой драйва (drive). Амплитуда этих колебаний, которая пропорциональна кориолисовым ускорениям, выделяется фазовым детектором 9, на вход для опорного сигнала которого поступает через фазосдвигающее устройство 8 выходной сигнал первого устройства выделения разности токов 6. ФНЧ 10 подавляет высокочастотные составляющие выходного сигнала фазового детектора 9 и выделяет низкочастотную составляющую, которая и является полезным сигналом. Если резонансная частота подвеса ПМ 1 по оси вторичных колебаний Fp совпадает с частотой Fd первичных колебаний ПМ 1, то фазовый сдвиг, вносимый устройством 8, может быть установлен равным нулю. Отметим, что в случае, когда Fd<Fp (случай Fd1), сдвиг ϕ устанавливается равным 90°, если не производится подстройка резонансных частот.
Рассмотрим, как введенные элементы 17-19 обеспечивают автоматическую подстройку Fp под Fd1.
Обозначим напряжение на выходе первого устройства выделения разности токов 6 - U6, а напряжение на выходе второго устройства выделения разности токов 7 - U7. Эти напряжения для случая Fd<Fp можно представить в виде выражений:


где Uп(t), Uкв(t) - соответственно полезный сигнал и квадратурная помеха.
Если обозначить β фазовый сдвиг сигнала, вносимый подвесом ПМ1 по оси вторичных колебаний (величина β может быть определена по ФЧХ на фиг.1), то при Fd≈Fp выражение (2) примет вид

Полагая, что измеряемая угловая скорость является переменным сигналом и изменяется, например, по гармоническому закону, величина квадратурной помехи превышает полезный сигнал, что часто имеет место на практике, т.е. выполняется условие

Полагая, что фазовый детектор реализован в виде последовательно соединенных аналогового перемножителя и ФНЧ, получим, что на выходе фазового детектора 17 выходной сигнал будет пропорционален величине Cos(β-90°). Это означает, что для случая, когда Fd находится слева от Fp, выходное напряжение фазового детектора 17 будет одного знака (например, положительным), когда Fd находится справа от Fp, выходное напряжение фазового детектора 17 будет другого знака (например, отрицательным), а при равенстве этих частот β=0 и выходное напряжение фазового детектора 17 будет равно 0. При нулевом напряжении источника 16 выходной сигнал суммирующего устройства 18 равен входному. При отклонении средней составляющей выходного сигнала фазового детектора 17 от нулевого значения выходное напряжение интегратора 19 будет изменяться, соответственно будет изменяться напряжение на электроде 15. Это изменение приведет к изменению резонансной частоты подвеса ПМ 1 ММГ по оси вторичных колебаний Fp. При этом частота будет изменяться до тех пор, пока разность фаз сигналов на входе фазового детектора 17 не станет равной 90°, т.е. пока резонансные частоты подвесов не совпадут.
В случае, когда необходимо работать с некоторой расстройкой Δf (Δf=Fp-Fd) между резонансными частотами (например, для обеспечения достаточно широкой полосы пропускания ММГ), нужная расстройка может быть установлена путем выбора напряжения источника 16 (U0). Оно выбирается следующим образом. Из ФЧХ определяют величину сдвига фазы (β0), соответствующего желаемой расстройке, и устанавливают величину в соответствии с выражением
 .
.
Величину вносимого фазосдвигающим устройством 8 фазового сдвига выбирают равным (90°+β0) или (90°-β0). При таком выборе резонансная частота подвеса ПМ 1 ММГ по оси вторичных колебаний Fp будет стабилизироваться и оставаться равной Δf+Fd за счет изменения напряжения на выходе интегратора 19 в случае, когда величина β0 изменится из-за изменения частоты Fp (например, из-за изменения температуры). Подавление квадратурной помехи и выделение полезного сигнала фазовым детектором 9 происходит в приведенном на фиг.2 ММГ так же, как и при Δf=0.
Таким образом, предложенный способ подстройки резонансной частоты может быть реализован в ММГ, работающем как при сведенных резонансных частотах, так и при разведенных. Отметим, что реализация элементов 8-10 и 16-19 возможна без изменения сути изобретения на дискретных элементах, в виде микроконтроллера или специализированной микросхемы, включающей и элементы 6, 7, 13, 14.
Изобретение относится к области микромеханики. В способе подстройки резонансной частоты подвеса подвижной массы (ПМ) микромеханического гироскопа (ММГ) по оси вторичных колебаний определяют среднюю составляющую произведения сигналов датчиков перемещения ПМ по осям первичных и вторичных колебаний и изменяют напряжение на дополнительном электроде до тех пор, пока полученная средняя составляющая произведения не станет равной нулю. ММГ содержит ПМ на двухосном резонансном подвесе, два емкостных датчика перемещения ПМ, два интерфейсных устройства, а также последовательно соединенные фазовый детектор, суммирующее устройство и интегратор. Техническим результатом является упрощение конструкции ММГ и повышение его точности. 2 с.п. ф-лы, 2 ил.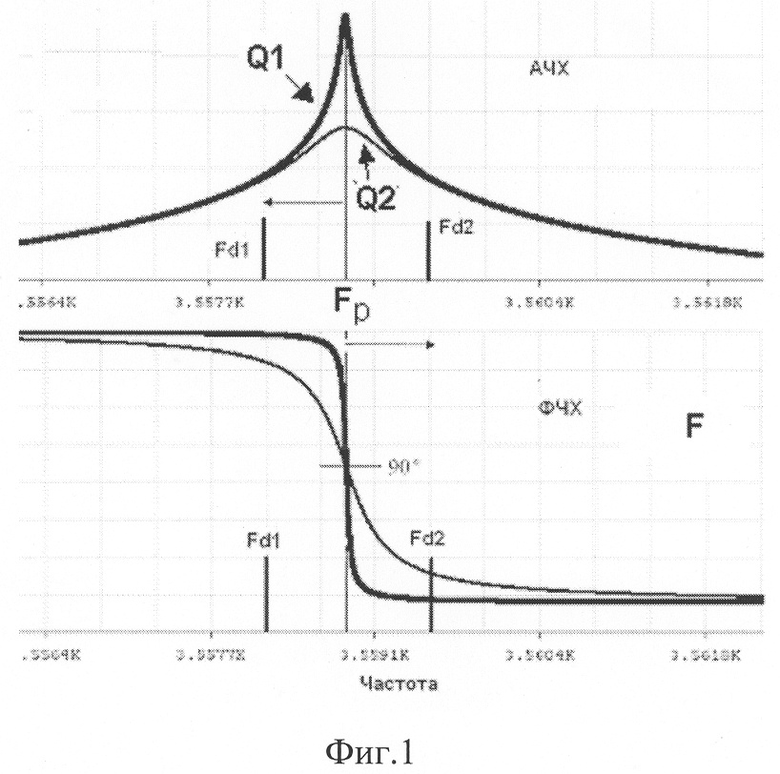
| US 6553833 B1, 29.04.2003 | |||
| US 6067858 А, 30.05.2000 | |||
| ПЕШЕХОНОВ В.Г | |||
| и др | |||
| Результаты разработки микромеханического гироскопа | |||
| XII Санкт-Петербургская международная конференция по интегрированным навигационным системам, 23-25 мая 2005, с.268-274 | |||
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2272994C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| JP 2000105125 А, 11.04.2000 | |||
| US 7032451 B2, 25.04.2006 | |||
| WO 2005075939 A1, 18.08.2005. | |||

