Изобретение относится к вспомогательному железнодорожному оборудованию, а именно к управлению нанесения смазки на рельсы.
Известен способ управления устройством для нанесения смазки на рельсы, заключающийся в том, что подают смазку в зону трения колес и рельсов тогда, когда кузов локомотив получает угловой крен при входе в кривую пути, при этом крен должен достигать значительных величин (SU, А.С. №1652154 А1, кл. B61K 3/02, опубл. 1989 г.).
Недостатком известного способа является то, что нанесение смазки проводится без учета радиуса кривизны рельсов колеи и не на всем протяжении ее кривой. Недостатком известного способа также является то, что если крен незначителен, то смазывания не будет.
Известен способ управления устройством для нанесения смазки на рельсы, заключающийся в том, что устанавливают устройство для нанесения смазки на рельсы в конце подвижной единицы (локомотива) по ходу движения нанесение смазки осуществляют в зависимости от сигнала системы управления, которая содержит устройство для получения изображения участка рельса, расположенного перед движущимся транспортным средством, и устройство для обработки изображений. Если отклонение рельсового пути от заданного направления превышает предельное значения, то система управления генерирует сигнал для нанесения смазки. (DE, Заявка №19854617А1, кл. B61K 3/02, 1998 г.)
Недостатком известного способа является то, что в условиях ограниченной видимости нанесение смазки на рельсы не будет гарантировано.
Известен способ управления нанесением смазки устройством для смазывания железнодорожных рельсов, принятый за прототип, установленным на подвижном составе, заключающийся в том, что нанесение смазки осуществляют в зависимости от радиосигнала, получаемого о радиопередающего устройства (радиомаяка), установленного на американской спутниковой системе навигации "GPS" и принимаемого приемником (радиопеленгатором) сигналов, установленным на подвижном составе.
По радиосигналу спутниковой системы устанавливают координаты положения соответствующей единицы подвижного состава, сравнивают координаты положения единицы подвижного состава с позиционными данными, содержащимися в памяти, и при совпадении координат дают, анализатор (электронный блок), команду о начале и окончании смазки рельс (DE, патент, №19632958С1, кл. B61K 3/02, 1998 г.).
Недостатками известного способа управления являются:
- на территории России не реализована система радиопередающих устройств, сигналы которых возможно использовать для определения координат единицы подвижного состава на определенном участке железнодорожного пути;
- для обеспечения ее работоспособности необходимы точные электронные навигационные карты конкретных участков железнодорожного пути;
- возможны пропуски засеченных точек при значительных скоростях движения, т.к. время обновления информации в спутниковых приемниках не может быть меньше 1 с. При скорости движения 100 км/час за 1 с приемник перемещается на 27,8 м, что соответствует значительному угловому перемещению (на участке с радиусом кривизны 300 м угловое перемещение составляет около 10°). При малом радиусе сигнализации (менее 40 м) вероятность пропуска точки сигнализации возрастает, а при большом радиусе сигнализации значительно снижается точность начала и окончания процесса рельсосмазывания;
- для установления местонахождения соответствующей единицы подвижного состава предлагается использование сигналов спутниковой системы навигации "GPS". Global Positioning System (GPS) - американская спутниковая навигационная система. Ее аппаратура управляется американской стороной и может быть отключена в любое время. Отечественная глобальная навигационная система ГЛОНАСС еще развернута не в полном объеме над территорией России.
Известна система подачи (управления) смазки в устройстве для смазывания железнодорожных рельсов, устройство для смазывания установлено на раме тележки транспортного средства и содержит рельсосмазыватель, тахогенератор, установленный на буксе колесной пары, и электронный блок, управляющий работой рельсосмазывателя. Кроме этого, в систему управления включены гидрораспределители и дозатор с источником смазки и блок управления, связанный со скоростемером (датчиком скорости) транспортного средства, а дозатор выполнен в виде двух пневмогидроцилиндров, управляемых гидродросселей, связанных с электронным блоком управления и пневмораспределителем. Управляющий сигнал на рельсосмазыватель (устройство для нанесения смазки на рельсы) подается после того, как бесконтактные измерительные средства зарегистрируют вхождение тележки с рельсосмазывателем в криволинейный участок рельсовой колеи: при въезде транспортного средства на криволинейный участок пути вследствие поворота тележки срабатывает один из бесконтактных датчиков, переводящих гидрораспределители рельсосмазывателя в левое или правое положение. В зависимости от скорости движения транспортного средства открывается требуемое число гидродросселей рельсосмазывателя и в зону контакта гребня колеса с рельсом поступает смазка (RU, патент №2085422, кл. B61K 3/02, 1997 г.).
Недостатком известной системы управления является то, что она не обеспечивает определенное дозирование смазки в зависимости от радиуса кривизны рельсовой колеи и не наносит смазку на протяжении всей кривой.
Известна система управления нанесением смазки в устройстве для смазывания железнодорожных рельсов, принятая за прототип, которая содержит управляющее устройство, которое включает в себя радиопередающее устройство (радиомаяк), приемник (радиопеленгатор) радиосигналов, с помощью которых сообщаются координаты положения подвижного состава, и анализатор (электронный блок), который сравнивает координаты положения единицы подвижного состава с позиционными данными, содержащимися в памяти, и при совпадении координат посылает сигнал о начале и окончании процесса смазки. В качестве источников сигналов возможно использование радиопередающих устройств, расположенных соответствующим образом, по радиосигналу которых можно установить координаты положения соответствующей единицы подвижного состава. Также для установления местонахождения соответствующей единицы подвижного состава возможно использование сигналов спутниковой системы навигации "GPS" (DE, патент, №19632958 С1, кл. B61K 3/02, 1998 г.).
Недостатком известной системы управления являются:
- на территории России не реализована система радиопередающих устройств, сигналы которых возможно использовать для определения координат единицы подвижного состава на определенном участке железнодорожного пути;
- для обеспечения ее работоспособности необходимы точные электронные навигационные карты конкретных участков железнодорожного пути;
- возможны пропуски засеченных точек при значительных скоростях движения, т.к. время обновления информации в спутниковых приемниках не может быть меньше 1 с. При скорости движения 100 км/час за 1 с приемник перемещается на 27,8 м, что соответствует значительному угловому перемещению (на участке с радиусом кривизны 300 м угловое перемещение составляет около 10°). При малом радиусе сигнализации (менее 40 м) вероятность пропуска точки сигнализации возрастает, а при большом радиусе сигнализации значительно снижается точность начала и окончания процесса рельсосмазывания;
- для установления местонахождения соответствующей единицы подвижного состава предлагается использование сигналов спутниковой системы навигации "GPS". Global Positioning System (GPS) - американская спутниковая навигационная система. Ее аппаратура управляется американской стороной и может быть отключена в любое время. Отечественная глобальная навигационная система ГЛОНАСС развернута еще не в полном объеме над территорией России.
Техническим результатом изобретения является совершенствование способа и системы управления устройством для нанесения смазки на рельсы для повышения эффективности рельсосмазывания за счет автоматического дозирования смазки на железнодорожные рельсы в зависимости от радиуса кривизны рельсовой колеи и скорости движения подвижного состава и автоматическое смазывание на протяжении всей кривой рельсовой колеи.
Указанный технический результат достигается тем, что в способе управления устройством для нанесения смазки на рельсы, заключающийся в том, что устанавливают устройство для нанесения смазки на рельсы на подвижном составе, осуществляют смазывание рельсов в криволинейном участке пути в зависимости от радиосигнала с радиомаяка и принимающего приемника радиопеленгатора, оборудуют подвижной состав в начале и в конце по ходу его движения соответственно радиомаяком, излучающим радиосигнал, и радиопеленгатором с электронным блоком управления, к которому подключают датчик скорости, фиксируют радиопеленгатором в зависимости от формы кривизны рельсовой колеи участка пути угловое отклонение радиосигнала влево или вправо от продольной оси рельсовой колеи, выдают через электронный блок управления команду на работу левого или правого устройства нанесения смазки на рельсы и измеряют на участке рельсовой колеи в каждое мгновение с помощью радиосигнала угол α между векторами скорости начала и конца подвижного состава, вычисляют в электронном блоке управления радиус R кривизны рельсовой колеи из соотношения:

где L - расстояние между радиомаяком и радиопеленгатором, выбираемое с необходимым упреждением начала смазки до вхождения устройства для нанесения смазки на рельсы в криволинейном участке пути,
и подают с помощью электронного блока управления команду на устройство для нанесения смазки на рельсы на смазывание рельс и дозировку смазки в зависимости от радиуса кривизны рельсовой колеи и скорости подвижного состава, и тем, что в системе управления устройством для нанесения смазки на рельсы, содержащей радиомаяк для излучения радиосигналов, радиопеленгатором для приема радиосигналов с электронным блоком управления и датчиком скорости подвижного состава, подвижной состав оборудованы в начале и конце по ходу его движения соответственно радиомаяком и радиопеленгатором для измерения угла α отклонения радиосигнала между векторами скоростей начала и конца подвижного состава, вычисления в электронном блоке управления радиуса R кривизны рельсовой колеи из соотношения
,
где L - расстояние между радиомаяком и радиопеленгатором, с необходимым упреждением,
и для подачи с помощью электронного блока управления команды на устройство для нанесения смазки на рельсы на смазывание рельс и дозировку смазки в зависимости от радиуса кривизны рельсовой колеи и скорости подвижного состава.
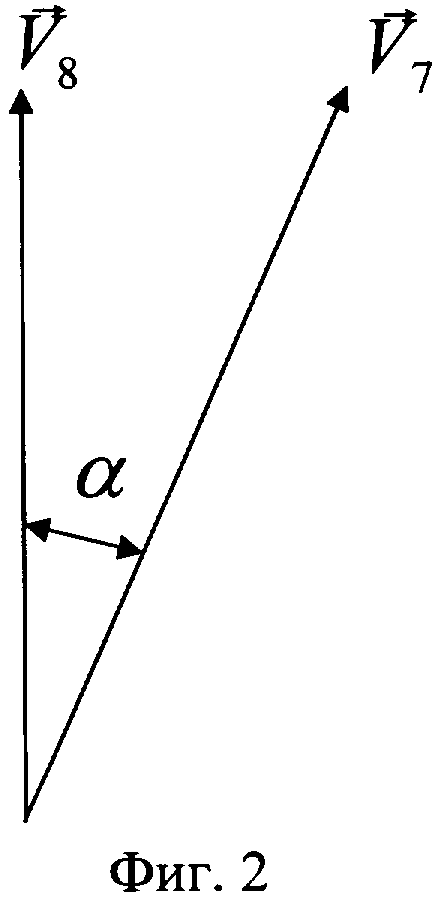
На фиг.1 представлена структурная схема системы управления, с помощью которой реализуется заявляемый способ управления устройством для нанесения смазки на рельсы, на фиг.2 изображено векторами изменение углового направления скоростей начала и конца подвижного состава.
Система управления для реализации предлагаемого способа включает (фиг.1): радиомаяк (радиопередающее устройство) 1 для излучения радиосигналов, радиопеленгатор (приемник) радиосигналов 2 с электронным блоком управления 3 и датчиком 4 скорости подвижного состава 5, выполненный в виде датчика скорости колеса состава, устройство 6 для нанесения смазки на рельсы. Радиомаяк 1 и радиопеленгатор 2 установлены на подвижном составе 5 соответственно в начале и в конце по ходу движения, при этом радиомаяк 1 установлен ближе к голове подвижного состава 5 на локомотиве или вагоне 7, а радиопеленгатор 2 - ближе к его хвостовой части подвижного состава 5, например на вагоне 8, передвигающимся по рельсовой колее 9 участка пути с устройством 6 для нанесения смазки на рельсы для измерения угла α (фиг.1, 2) отклонения радиосигнала между векторами скорости начала  и конца
и конца  подвижного состава 5, вычисления в электронном блоке управления 3 радиуса R кривизны рельсовой колеи 9 из соотношения
подвижного состава 5, вычисления в электронном блоке управления 3 радиуса R кривизны рельсовой колеи 9 из соотношения
где L - расстояние между радиомаяком 1 и радиопеленгатором 2 с необходимым упреждением (L.>50 м) начала смазки до вхождения устройства 6 для нанесения смазки на рельсы в криволинейном участке пути,
и подачи с помощью электронного блока управления 3 команды на устройство 6 для нанесения смазки на рельсы на смазывание рельс и дозировку смазки в зависимости от радиуса R кривизны рельсов колеи и скорости подвижного состава 5.
Заявляемый способ реализуется следующим образом.
Устанавливают устройство 6 нанесения смазки на рельсы в конце хвостовой части подвижного состава 5 на вагоне 8, оборудуют подвижной состав 5 по ходу движения в начале ближе к голове на локомотиве или вагоне 7 радиомаяком 1 и в конце на вагоне 8 радиопеленгатором 2 с электронным блоком управления 3, к которому подключают датчик 4 скорости подвижного состава. Радиомаяк 1 излучает радиосигнал. Принимают и фиксируют радиопеленгатором 2 в зависимости от формы кривизны рельсовой колеи 9 угловое отклонение α радиосигнала влево или вправо от продольной оси О-О рельсовой колеи 9. На прямом участке рельсовой колеи 9 излучение радиомаяка 1 принимается радиопеленгатором 2 как приходящее без отклонения от оси О-О рельсовой колеи 9, и радиопеленгатор 2 не выдает на электронный блок управления 3 сигнал о нахождении подвижного состава 5 на криволинейном участке рельсовой колеи 9. При въезде на криволинейный участок рельсовой колеи 9 радиомаяк 1 отклоняется в сторону поворота рельсовой колеи 9 относительно прямолинейного движения. Угловое изменение направления радиосигнала еще до въезда вагона 8 с устройством 6 для нанесения смазки на рельсы в криволинейном участке рельсовой колеи 9 фиксируют радиопеленгатором 2, который выдает через электронный блок управления 3 команду на работу левого или правого устройства 6 нанесения смазки на рельсы. Измеряют на участке рельсовой колеи 9 в каждое мгновение с помощью радиосигнала угол α между векторами скорости начала - локомотива (вагона) 7 подвижного состава 5 и  скорости конца подвижного состава - вагона 8, вычисляют в электронном блоке управления 3 радиус R кривизны рельсовой колеи 9 из соотношения
скорости конца подвижного состава - вагона 8, вычисляют в электронном блоке управления 3 радиус R кривизны рельсовой колеи 9 из соотношения
где L - расстояние между радиомаяком 1 и радиопеленгатором 2, выбираемое с необходимым упреждением начала смазки до вхождения устройства 6 для нанесения смазки на рельсы в криволинейный участок пути (L>50 м).
Подают с помощью электронного блока управления 3 команду на устройство 6 для нанесения смазки на рельсы на смазывание рельс и дозировку смазки в зависимости от радиуса R кривизны рельсовой колеи 9 и скорости подвижного состава 5, определяемым датчиком 4 скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ СМАЗКИ НА РЕЛЬСЫ ПОДВИЖНОГО СОСТАВА И СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВОМ | 2010 |
|
RU2434773C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДАЧИ СМАЗКИ НА РЕЛЬСЫ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2425768C1 |
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ЛУБРИКАЦИИ РЕЛЬСОВ | 2010 |
|
RU2443587C1 |
| СПОСОБ УПРАВЛЕНИЯ СМАЗКОЙ РЕЛЬСОВ В КРИВЫХ УЧАСТКАХ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2492087C2 |
| МОДЕРНИЗИРОВАННЫЙ СТАЦИОНАРНЫЙ ПУТЕВОЙ РЕЛЬСОСМАЗЫВАТЕЛЬ | 2018 |
|
RU2682687C1 |
| РЕЛЬСОСМАЗЫВАТЕЛЬ | 1998 |
|
RU2149113C1 |
| СМАЗОЧНАЯ КОМПОЗИЦИЯ ДЛЯ ЛУБРИКАЦИИ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 1999 |
|
RU2161181C2 |
| СПОСОБ ЗАЩИТЫ ОТ БОКОВОГО ИЗНОСА ГОЛОВКИ РЕЛЬСА И СМАЗОЧНАЯ КОМПОЗИЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2542857C2 |
| СПОСОБ ЗАЩИТЫ ОТ ИЗНОСА ГОЛОВКИ РЕЛЬСА И ГРЕБНЕЙ БАНДАЖЕЙ КОЛЕСНЫХ ПАР | 1994 |
|
RU2111141C1 |
| РЕЛЬСО-ГРЕБНЕСМАЗЫВАЮЩЕЕ УСТРОЙСТВО | 2017 |
|
RU2665098C1 |
Изобретение относится к вспомогательному железнодорожному оборудованию, а именно к управлению нанесения смазки на рельсы. Способ управления устройством для нанесения смазки на рельсы заключается в том, что устанавливают устройство для нанесения смазки на рельсы на подвижном составе. Подвижной состав в начале и в конце по ходу его движения оборудуют соответственно радиомаяком, излучающим радиосигнал, и радиопеленгатором с электронным блоком управления, к которому подключают датчик скорости. Фиксируют радиопеленгатором в зависимости от формы кривизны рельсовой колеи участка пути угловое отклонение радиосигнала влево или вправо от продольной оси рельсовой колеи. Выдают через электронный блок управления команду на работу левого или правого устройства нанесения смазки на рельсы и измеряют на участке рельсовой колеи в каждое мгновение с помощью радиосигнала угол α между векторами скорости начала и конца подвижного состава, вычисляют в электронном блоке управления радиус R кривизны рельсовой колеи из соотношения  , где L - расстояние между радиомаяком и радиопеленгатором, выбираемое с необходимым упреждением начала смазки до вхождения устройства для нанесения смазки на рельсы в криволинейном участке пути, и подают с помощью электронного блока управления команду на устройство для нанесения смазки на рельсы на смазывание рельс и дозировку смазки в зависимости от радиуса кривизны рельсовой колеи и скорости подвижного состава. В системе управления устройством для нанесения смазки на рельсы подвижной состав оборудован в начале и конце по ходу его движения соответственно радиомаяком и радиопеленгатором для измерения угла α отклонения радиосигнала между векторами скоростей начала и конца подвижного состава, вычисления в электронном блоке управления радиуса R кривизны рельсовой колеи из соотношения
, где L - расстояние между радиомаяком и радиопеленгатором, выбираемое с необходимым упреждением начала смазки до вхождения устройства для нанесения смазки на рельсы в криволинейном участке пути, и подают с помощью электронного блока управления команду на устройство для нанесения смазки на рельсы на смазывание рельс и дозировку смазки в зависимости от радиуса кривизны рельсовой колеи и скорости подвижного состава. В системе управления устройством для нанесения смазки на рельсы подвижной состав оборудован в начале и конце по ходу его движения соответственно радиомаяком и радиопеленгатором для измерения угла α отклонения радиосигнала между векторами скоростей начала и конца подвижного состава, вычисления в электронном блоке управления радиуса R кривизны рельсовой колеи из соотношения  , и подачи с помощью электронного блока управления команды на устройство для нанесения смазки на рельсы на смазывание рельс и дозировку смазки в зависимости от радиуса кривизны рельсовой колеи и скорости подвижного состава. В результате повышается эффективность рельсосмазывания. 2 н.п. ф-лы, 2 ил.
, и подачи с помощью электронного блока управления команды на устройство для нанесения смазки на рельсы на смазывание рельс и дозировку смазки в зависимости от радиуса кривизны рельсовой колеи и скорости подвижного состава. В результате повышается эффективность рельсосмазывания. 2 н.п. ф-лы, 2 ил.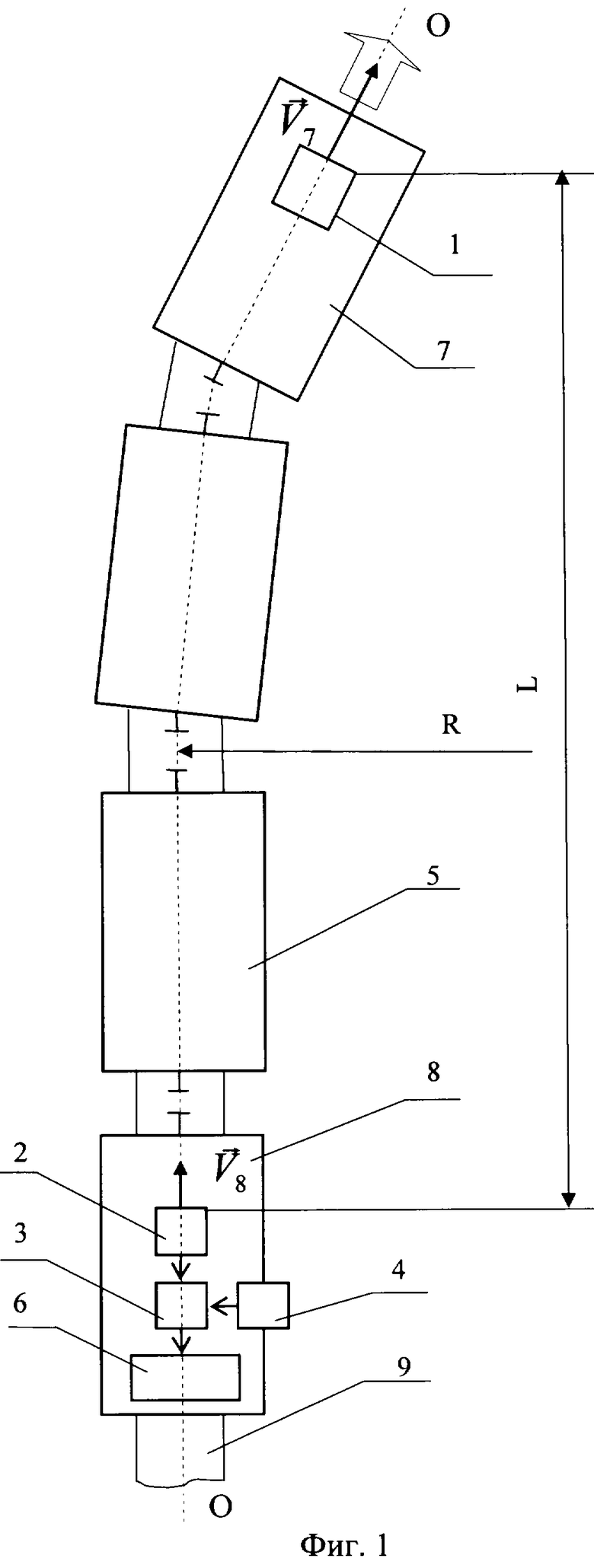
 ,
,
где L - расстояние между радиомаяком и радиопеленгатором, выбираемое с необходимым упреждением начала смазки до вхождения устройства для нанесения смазки на рельсы в криволинейном участке пути,
и подают с помощью электронного блока управления команду на устройство для нанесения смазки на рельсы на смазывание рельс и дозировку смазки в зависимости от радиуса кривизны рельсовой колеи и скорости подвижного состава.
,
где L - расстояние между радиомаяком и радиопеленгатором, выбираемое с необходимым упреждением начала смазки до вхождения устройства для нанесения смазки на рельсы в криволинейном участке пути,
и подачи с помощью электронного блока управления команды на устройство для нанесения смазки на рельсы на смазывание рельс и дозировку смазки в зависимости от радиуса кривизны рельсовой колеи и скорости подвижного состава.
| DE 19632958 А1, 29.01.1998 | |||
| УСТРОЙСТВО ДЛЯ СМАЗКИ ВЫКРУЖКИ ГРЕБНЯ КОЛЕСА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2232096C2 |
| УСТРОЙСТВО ДЛЯ СМАЗЫВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 1994 |
|
RU2085422C1 |
| SU 18011839 А1, 15.03.1993. | |||

