Изобретение относится к радиотехнике и может быть использовано для распознавания видов манипуляции цифровых сигналов радиорелейных и спутниковых линий связи в процессе технического контроля.
В современных радиорелейных и спутниковых линиях связи используются, главным образом, цифровые сигналы с различными видами многопозиционной манипуляции: фазовая (ФМ), амплитудно-фазовая (АФМ), квадратурная амплитудная (КАМ) и частотная (ЧМн). Распознавание видов манипуляции является важным этапом технического контроля, позволяющим быстро и эффективно обеспечить демодуляцию и дальнейшую обработку цифровых потоков.
Известно [1] устройство для распознавания видов манипуляции цифровых сигналов (устройство для распознавания радиосигналов), содержащее блок обработки сигналов и два электронно-лучевых индикатора. Блок обработки содержит первый частотный детектор, первый анализатор мгновенного спектра, первый умножитель (удвоитель) частоты, амплитудный детектор, первый преобразователь аналог - код, второй анализатор мгновенного спектра, первый блок сравнения, третий анализатор мгновенного спектра, блок клиппирования, второй преобразователь аналог - код, второй блок сравнения, детектор знака, третий анализатор мгновенного спектра, третий преобразователь аналог - код, первый и второй элементы И, блок логической обработки, нуль-орган, генератор опорного напряжения, ключ, первый усилитель вертикальной развертки, первый фазовращатель на 90°, второй усилитель горизонтальной развертки, второй частотный детектор, второй умножитель (удвоитель) частоты, третий усилитель вертикальной развертки, второй фазовращатель на 90°, четвертый усилитель горизонтальной развертки.
Известное устройство позволяет обеспечить визуальное распознавание сигналов с многократной фазовой манипуляцией.
Недостатком устройства являются ограниченные функциональные возможности при распознавании видов манипуляции.
Это объясняется тем, что в процессе обработки используются особенности сигналов, характерные только для многократной фазовой манипуляции. Для функционирования данного устройства необходима синхронизация частоты опорного генератора сигналом с промежуточной частотой. Известное устройство не позволяет распознавать сигналы с квадратурной амплитудной манипуляцией и частотной манипуляцией несущей частоты.
Кроме того, известное устройство отличается сложностью, требует использования двух индикаторов, а это в совокупности приводит к сложной процедуре и неоднозначности распознавания.
Известно [2] устройство для распознавания видов манипуляции цифровых сигналов (устройство для определения класса радиосигналов), содержащее фазовращатель, первый и второй фазовые детекторы, элемент задержки и электронно-лучевой индикатор.
Известное устройство обеспечивает визуальное распознавание сигналов с фазовой манипуляцией. Упрощение состава позволило реализовать несложную процедуру распознавания, повысить вероятность правильного определения вида манипуляции и быстродействие устройства, что особенно важно при использовании приемников со сканирующей частотой настройки.
Недостатком устройства являются ограниченные функциональные возможности при распознавании видов манипуляции.
Это объясняется низкой помехоустойчивостью и неработоспособностью при отсутствии скачков на 180°, в результате чего не обеспечивается распознавание сигналов с квадратурной амплитудной манипуляцией, сигналов со сдвигом периода и с частотной манипуляцией.
Наиболее близким по технической сущности к заявленному объекту является устройство для распознавания видов манипуляции цифровых сигналов [3] (прототип), содержащее вычислитель, выход которого подключен к входу графического индикатора, генератор опорного сигнала, выход которого соединен с входом фазовращателя, тактовый синхронизатор, первую последовательную цепь из первого фазового детектора, первого аналого-цифрового преобразователя (АЦП), первого регистра памяти и второго регистра памяти, выход которого подключен к второму входу вычислителя, первый вход которого соединен с выходом первого регистра памяти. Устройство содержит также вторую последовательную цепь из второго фазового детектора, второго АЦП, третьего регистра памяти и четвертого регистра памяти, выход которого подключен третьему входу вычислителя, четвертый вход которого соединен с выходом третьего регистра памяти. Выход генератора опорного сигнала подключен к второму входу первого фазового детектора, выход фазовращателя подключен к второму входу второго фазового детектора, выход тактового синхронизатора соединен с входом синхронизации первого и второго АЦП и первого, второго, третьего и четвертого регистров памяти, а второй выход вычислителя подключен к управляющим входам первого, второго, третьего и четвертого регистров памяти.
Известное устройство обеспечивает распознавание сигналов ФМ, ФМ со сдвигом периода, АФМ и КАМ. Устройство обладает повышенной помехоустойчивостью за счет корреляционного метода оценки величины фазовых скачков и статистической обработки сигнала.
Однако известное устройство обладает ограниченными функциональными возможностями при распознавании видов манипуляции цифровых сигналов, в частности устройство не обеспечивает распознавание частотно-манипулированных (ЧМн) сигналов.
Это объясняется тем, что при контроле частотно-манипулированных сигналов известным устройством фазовые скачки, на которые реагирует устройство, отсутствуют, а имеющиеся фазовые переходы носят хаотический шумоподобный характер.
Целью изобретения является расширение функциональных возможностей при распознавании цифровых сигналов за счет распознавания частотно-манипулированных сигналов при контроле радиорелейных и спутниковых линий связи.
Поставленная цель достигается за счет того, что в известное устройство для распознавания видов манипуляции цифровых сигналов, содержащее вычислитель, первый выход которого подключен к входу графического индикатора, генератор опорного сигнала, выход которого соединен с входом фазовращателя, тактовый синхронизатор, первую последовательную цепь из первого фазового детектора, первого АЦП, первого регистра памяти, второго регистра памяти, выход которого подключен к второму входу вычислителя, первый вход которого соединен с выходом первого регистра памяти, а также содержащее вторую последовательную цепь из второго фазового детектора, второго АЦП, третьего регистра памяти и четвертого регистра памяти, выход которого подключен к третьему входу вычислителя, четвертый вход которого соединен с выходом третьего регистра памяти, причем выход генератора опорного сигнала подключен к второму входу первого фазового детектора, выход фазовращателя подключен к второму входу второго фазового детектора, выход тактового синхронизатора соединен с входами синхронизации первого и второго АЦП и первого, второго, третьего и четвертого регистров памяти, а второй выход вычислителя подключен к управляющим входам первого, второго, третьего и четвертого регистров памяти, введены первый перемножитель, полосовой фильтр, второй перемножитель, канальный фильтр, генератор сдвига, смеситель сдвига, зональный полосовой фильтр, делитель, формирователь управляющего сигнала, первый и второй коммутаторы и квазиоптимальный линейный фильтр, первый выход которого подключен к делителю, а второй выход через смеситель сдвига, второй вход которого соединен с выходом генератора сдвига, зональный полосовой фильтр, первый перемножитель, второй вход которого подключен к выходу генератора опорного сигнала, полосовой фильтр и второй перемножитель, второй вход которого соединен с вторым выходом зонального полосового фильтра, подключен к входу канального фильтра, причем первый выход делителя через первый коммутатор соединен с первым входом первого фазового детектора, второй выход делителя через второй коммутатор соединен с первым входом второго фазового детектора, первый выход канального фильтра соединен с вторым входом первого коммутатора, второй выход канального фильтра соединен с вторым входом второго коммутатора, а на управляющие входы первого и второго коммутаторов подается напряжение с соответствующих выходов формирователя управляющего сигнала, вход которого соединен с третьим выходом вычислителя, при этом вход квазиоптимального линейного фильтра является входом устройства для распознавания видов манипуляции цифровых сигналов.
Устройство осуществляет дифференциацию сигналов частотной и фазовой манипуляцией, обеспечивает автокорреляционную обработку контролируемого частотно-манипулированного сигнала, в результате которой снимается избыточность спектра и появляются дискретные фазовые переходы, на которые реагируют фазовые детекторы каналов. В итоге за счет классификации сигналов с частотной манипуляцией расширяются функциональные возможности устройства, увеличивается число распознаваемых видов манипуляции цифровых сигналов.
Сочетание отличительных признаков и свойства предлагаемого устройства для распознавания видов манипуляции цифровых сигналов из литературы не известны, поэтому оно соответствует критериям новизны и изобретательского уровня.
На фиг.1 приведена функциональная схема устройства для распознавания видов манипуляции цифровых сигналов;
на фиг.2 - огибающая спектра сигнала в различных точках устройства;
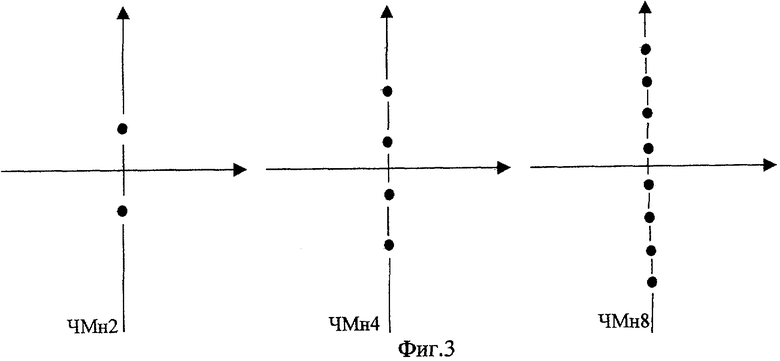
на фиг.3 - изображения фазовых скачков при контроле сигналов ЧМн на плоскости распознавания.
Устройство для распознавания видов манипуляции цифровых сигналов (фиг.1) содержит вычислитель 1, первый выход которого подключен к входу графического индикатора 2, генератор 3 опорного сигнала, выход которого соединен с входом фазовращателя 4, тактовый синхронизатор 5, первую последовательную цепь из первого фазового детектора 6, первого АЦП 7, первого регистра 8 памяти и второго регистра 9 памяти, выход которого подключен к второму входу вычислителя 1, первый вход которого соединен с выходом первого регистра 8 памяти. Устройство содержит также вторую последовательную цепь из второго фазового детектора 10, второго АЦП 11, третьего регистра 12 памяти и четвертого регистра 13 памяти, выход которого подключен к третьему входу вычислителя 1, четвертый вход которого соединен с выходом третьего регистра 12 памяти, причем выход генератора 3 опорного сигнала подключен к второму входу первого фазового детектора 6, выход фазовращателя 4 подключен к второму входу второго фазового детектора 10, выход тактового синхронизатора 5 соединен с входами синхронизации первого 7 и второго АЦП 11 и первого, второго, третьего и четвертого регистров (8, 9, 12, 13) памяти, а второй выход вычислителя 1 подключен к управляющим входам первого, второго, третьего и четвертого регистров (8, 9, 12, 13) памяти. Кроме того, устройство содержит введенные первый перемножитель 14, полосовой фильтр 15, второй перемножитель 16, канальный фильтр 17, генератор 18 сдвига, смеситель 19 сдвига, зональный полосовой фильтр 20, делитель 21, формирователь 22 управляющего сигнала, первый и второй коммутаторы (23, 24) и квазиоптимальный линейный фильтр 25, первый выход которого подключен к делителю 21, а второй выход через смеситель 19 сдвига, второй вход которого соединен с выходом генератора 18 сдвига, зональный полосовой фильтр 20, первый перемножитель 14, второй вход которого подключен к выходу генератора 3 опорного сигнала, полосовой фильтр 15 и второй перемножитель 16, второй вход которого соединен с вторым выходом зонального полосового фильтра 20, подключен к входу канального фильтра 17. Первый выход делителя 21 через первый коммутатор 23 соединен с первым входом первого фазового детектора 6, второй выход делителя 21 через второй коммутатор 24 соединен с первым входом второго фазового детектора 10, первый выход канального фильтра 17 соединен с вторым входом первого коммутатора 23, второй выход канального фильтра 17 соединен с вторым входом второго коммутатора 24, а на управляющие входы первого 23 и второго коммутатора 24 подается напряжение с соответствующего выхода формирователя 22 управляющего сигнала. Вход квазиоптимального линейного фильтра 25 является входом устройства для распознавания видов манипуляции цифровых сигналов.
Устройство (фиг.1) функционирует следующим образом.
В процессе контроля осуществляется раздельная обработка сигналов с фазовыми и частотными видами манипуляции несущей частоты.
Априорно неизвестный сигнал с частотой ƒc подается на вход квазиоптимального линейного фильтра 25. Полоса пропускания этого фильтра Δƒс переменная и устанавливается равной ширине спектра контролируемого сигнала Δƒсп. Фильтр 25 обеспечивает минимизацию воздействия на структуру сигнала флуктуационных шумов и посторонних соседних по частоте сигналов.
В качестве квазиоптимального линейного фильтра может быть использован, например, фильтр, описанный в [4].
Процесс преобразований может быть проиллюстрирован на примере сигнала ЧМн2.
Спектр поступившего сигнала для случая ЧМн2 и модулирующего сигнала типа "меандр" может быть представлен в виде:

где: mf=Δƒg/F - индекс частотной манипуляции;
Δƒд - девиация частоты;
ωс=2πƒс;
Ω=2πF - частота модулирующего сигнала;
n - номер боковой частоты спектра.
С первого выхода квазиоптимального линейного фильтра 25 сигнал подается на делитель 21 и далее через коммутаторы 23, 24 на входы первого 6 и второго фазового детектора 10.
В исходном состоянии коммутаторы 23, 24 обеспечивают прохождение сигнала с первого входа на соответствующий фазовый детектор 6, 10. Устройство подготовлено к распознаванию сигналов с фазовыми видами манипуляции. Если такие сигналы появляются на входе, то дальнейшее функционирование устройства аналогично прототипу. Если же контролируется сигнал с частотной манипуляцией, то распознавания не произойдет ввиду отсутствия фазовых скачков, на которые реагирует устройство. С третьего выхода вычислителя 1 на вход формирователя 22 подается сигнал, инициирующий формирование управляющего напряжения, подаваемого на управляющие входы коммутаторов 23, 24 и переводящего их в состояние, при котором сигнал проходит с второго входа каждого коммутатора на его выход. Изменение режима работы вычислителя 1, приводящее к появлению сигнала на его третьем выходе, отображается на графическом индикаторе 2.
С второго выхода квазиоптимального линейного фильтра 25 сигнал ƒс подается на смеситель 19 сдвига, опорный сигнал на который поступает с генератора 18 сдвига. Инфрадинный сдвиг частоты переносит спектр контролируемого сигнала в область более высоких частот для снижения степени воздействия гармонических и нелинейных помеховых составляющих сигнала при дальнейшей обработке.
С выхода смесителя 19 сдвига сигнал подается на зональный полосовой фильтр 20, исключающий воздействие зеркальных составляющих преобразования частоты. Для этого полоса пропускания фильтра 20 берется равной двум-пяти значениям ширины спектра контролируемого сигнала.
С первого выхода зонального полосового фильтра 20 сигнал подается на первый перемножитель 14, а с второго выхода - на второй перемножитель 16. На второй вход первого перемножителя 14 подается сигнал ƒог с выхода генератора 3 опорного сигнала и в результате перемножения на выходе появляется сигнал с частотой
Fпер1 = fсдв + fог,
а спектр сигнала на выходе перемножителя 14 примет вид:

где ωпер1=2πƒпер1.
При этом ширина спектра преобразованного сигнала остается неизменной (Δƒсп). Сигнал a2(t) селектируется полосовым фильтром 15 и поступает на первый вход второго перемножителя 16.
В результате перемножения сигналов a2(t) и aсдв(t) в каскаде 16 осуществляется автокорреляционная обработка двух широкополосных сигналов и происходит регенерация несущей частоты ƒo=ƒог, сжатие спектра до величины 2Fтч, где Fтч - тактовая частота ЧМн сигнала, а на выходе перемножителя 16 спектр приобретает вид:

если принять амплитуду импульсов равной единице.
Но спектр a3(t) эквивалентен сигналу с амплитудно-импульсной (АИМн) манипуляцией, то есть фактически произведено преобразование частотной манипуляции в амплитудно-импульсную.
Канальный фильтр 17 выделяет этот сигнал и подает через его первый выход на первый коммутатор 23 и через второй выход - на второй коммутатор 24.
Процесс преобразований от входа смесителя 19 сдвига до выходов канального фильтра 17 показан на фиг.2, где фиг.2, а - огибающая спектра сигнала на выходе квазиоптимального линейного фильтра 25; фиг.2, б - огибающая спектра сигнала на выходе зонального фильтра 20, показана также спектральная линия частоты гетеродина 18 сдвига; фиг.2, в - огибающая спектра сигнала на выходе полосового фильтра 15; фиг.2, г - огибающая спектра сигнала на выходе канального фильтра 17.
Далее сигналы поступают на фазовые детекторы 6, 10, преобразуются в АЦП 7, 11 в цифровую форму, подаются последовательно на регистры 12, 13 памяти в первом канале и регистры 12, 13 памяти во втором канале. Выходные сигналы регистров памяти поступают на входы 1-4 вычислителя, который осуществляет считывание значений квадратурных составляющих из регистров памяти, вычисление длины сигнальных векторов (амплитуды сигналов) в моменты фазовых скачков и углов между осью абсцисс системы координат и каждым сигнальным вектором. Далее вычисляются координаты для построения плоскости распознавания на графическом индикаторе 2 и строятся гистограммы [5] с учетом граничных частот, подсчитываемых по всем возможным значениям, полученным в результате вычисления амплитуд. Результат построения отображается на графическом индикаторе 2. В итоге на графическом индикаторе 2 отображаются гистограмма амплитуд и плоскость распознавания (фиг.3). Анализ полученных данных дает полную информацию о виде манипуляции принятого сигнала. Ошибка при распознавании практически исключена, поскольку, во-первых, АИМн в системах спутниковой и радиорелейной связи не применяется, во-вторых, режим распознавания индицируется индикатором 2.
Таким образом, устройство для распознавания видов манипуляции цифровых сигналов существенно расширяет функциональные возможности прототипа за счет обработки и распознавания сигналов с частотной манипуляцией, в том числе ЧМн2, ЧМн4, ЧМн8.
Устройство экспериментально проверено и может быть использовано в составе станций технического контроля, а также мобильных станций радиорелейных линий связи для определения помеховой обстановки и оценки электромагнитной совместимости с другими техническими средствами в заданной местности.
Источники информации
1. Авт. св. 1765894, кл. Н03М 3/00.
2. RU 93034025 А, МПК G01R 23/16. Устройство для определения класса радиосигналов.
3. RU 2235337, кл. МПК H03h. Устройство для распознавания видов манипуляции цифровых сигналов.
4. Авт. св. 284025, МПК H03k 5/01. Фильтр с переменной полосой пропускания.
5. Прокис Джон. Цифровая связь. Пер. с англ. / Под ред. Д.Д. Кловского. - М.: Радио и связь. 2000. - 800 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛА МНОГОПОЗИЦИОННОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИИ С ЭКВИДИСТАНТНЫМ РАЗНЕСЕНИЕМ ПО ЧАСТОТЕ, ДЕМОДУЛЯТОР ТАКОГО СИГНАЛА И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2005 |
|
RU2290749C1 |
| НЕКОГЕРЕНТНЫЙ ПРИЕМНИК ЧАСТОТНО-МАНИПУЛИРОВАННЫХ СИГНАЛОВ С МИНИМАЛЬНЫМ СДВИГОМ | 2007 |
|
RU2373658C2 |
| ПРИЕМНИК ЦИФРОВЫХ СИГНАЛОВ | 2010 |
|
RU2423794C1 |
| Цифровой формирователь сигналов с манипуляцией минимальным сдвигом | 1987 |
|
SU1494242A1 |
| ЦИФРОВОЙ ПРИЕМНИК ДИСКРЕТНО-НЕПРЕРЫВНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ С АДАПТАЦИЕЙ ЧАСТОТЫ ДИСКРЕТИЗАЦИИ | 2007 |
|
RU2365036C2 |
| КВАЗИОПТИМАЛЬНЫЙ ПРИЕМНИК ДИСКРЕТНО-НЕПРЕРЫВНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2005 |
|
RU2300173C1 |
| КВАЗИОПТИМАЛЬНЫЙ ПРИЕМНИК ДИСКРЕТНО-НЕПРЕРЫВНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2004 |
|
RU2276459C1 |
| УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ ДОРОЖНОГО ДВИЖЕНИЯ | 2019 |
|
RU2714339C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЧАСОВ | 2000 |
|
RU2177167C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ВИДОВ МАНИПУЛЯЦИИ ЦИФРОВЫХ СИГНАЛОВ | 2002 |
|
RU2235337C2 |

Заявленное изобретение относится к радиотехнике. Технический результат - это значительное расширение функциональных возможностей устройства для распознавания видов манипуляции цифровых сигналов за счет обработки и распознавания видов манипуляции цифровых сигналов с многопозиционной частотной манипуляцией несущей. Для этого в такое устройство, содержащее вычислитель, графический индикатор, генератор опорного сигнала, фазовращатель, тактовый синхронизатор, первую и вторую последовательные цепи из фазового детектора, АЦП и двух регистров памяти, введены первый перемножитель, полосовой фильтр, второй перемножитель, канальный фильтр, генератор сдвига, смеситель сдвига, зональный полосовой фильтр, делитель, формирователь управляющего сигнала, первый и второй коммутаторы и квазиоптимальный линейный фильтр. 3 ил.
Устройство для распознавания видов манипуляции цифровых сигналов, содержащее графический индикатор, генератор опорного сигнала, выход которого соединен с входом фазовращателя, тактовый синхронизатор, первую последовательную цепь из первого фазового детектора, первого аналого-цифрового преобразователя, первого регистра памяти и второго регистра памяти, а также содержащее вторую последовательную цепь из второго фазового детектора, второго аналого-цифрового преобразователя, третьего регистра памяти и четвертого регистра памяти, причем выход генератора опорного сигнала подключен к второму входу первого фазового детектора, выход фазовращателя подключен к второму входу второго фазового детектора, выход тактового синхронизатора соединен с входами синхронизации первого и второго аналого-цифрового преобразователя и первого, второго, третьего и четвертого регистров памяти, отличающееся тем, что в него введены вычислитель, предназначенный для осуществления считывания значений квадратурных составляющих из регистров памяти, вычисления длины сигнальных векторов в моменты фазовых скачков и углов между осью абсцисс системы координат и каждым сигнальным вектором, первый перемножитель, полосовой фильтр, второй перемножитель, канальный фильтр, генератор сдвига, смеситель сдвига, зональный полосовой фильтр, делитель, формирователь управляющего сигнала, первый и второй коммутаторы и квазиоптимальный линейный фильтр, первый выход которого подключен к делителю, а второй выход через смеситель сдвига, второй вход которого соединен с выходом генератора сдвига, зональный полосовой фильтр, первый перемножитель, второй вход которого подключен к выходу генератора опорного сигнала, полосовой фильтр и второй перемножитель, второй вход которого соединен с вторым выходом зонального полосового фильтра, подключен к входу канального фильтра, причем первый выход делителя через первый коммутатор соединен с первым входом первого фазового детектора, второй выход делителя через второй коммутатор соединен с первым входом второго фазового детектора, первый выход канального фильтра соединен с вторым входом первого коммутатора, второй выход канального фильтра соединен с вторым входом второго коммутатора, а на управляющие входы первого и второго коммутатора подается напряжение с соответствующих выходов формирователя управляющего сигнала, вход которого соединен с третьим выходом вычислителя, первый выход которого подключен к входу графического интерфейса, а второй выход которого подключен к управляющим входам первого, второго, третьего и четвертого регистров памяти, выход второго регистра памяти подключен к второму входу вычислителя, первый вход которого соединен с выходом первого регистра памяти, выход четвертого регистра памяти подключен к третьему входу вычислителя, четвертый вход которого соединен с выходом третьего регистра памяти, при этом вход квазиоптимального линейного фильтра является входом устройства для распознавания видов манипуляции цифровых сигналов.
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ВИДОВ МАНИПУЛЯЦИИ ЦИФРОВЫХ СИГНАЛОВ | 2002 |
|
RU2235337C2 |
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ СИСТЕМ РАДИОСВЯЗИ | 2001 |
|
RU2216748C2 |
| JP 2005091373 A, 07.04.2005 | |||
| JP 2004151065 A, 27.05.2004 | |||
| JP 3237896 A, 23.10.1991. | |||

