Изобретение относится к радиотехнике и может быть использовано для распознавания вида модуляции радиосигналов в качестве составной части устройства для демодуляции сигналов.
Известно устройство для распознавания радиосигналов [1], содержащее первый частотный детектор, первый анализатор мгновенного спектра, первый умножитель (удвоитель) частоты, амплитудный детектор, первый преобразователь аналог - код, второй анализатор мгновенного спектра, первый блок сравнения, третий анализатор мгновенного спектра, блок клиппирования, второй преобразователь аналог - код, второй блок сравнения, детектор знака, третий анализатор мгновенного спектра, третий преобразователь аналог - код, первый и второй элементы И, блок логической обработки, нуль-орган, генератор опорного напряжения, ключ, первый усилитель вертикальной развертки, первый фазовращатель на 90°, второй усилитель горизонтальной развертки, первый электронно-лучевой индикатор, второй частотный детектор, второй умножитель (удвоитель) частоты, третий усилитель вертикальной развертки, второй фазовращатель на 90°, четвертый усилитель горизонтальной развертки, второй электронно-лучевой индикатор.
Это устройство позволяет повысить достоверность визуального распознавания сигналов с многократной фазовой манипуляцией. Однако для функционирования данного устройства необходимо совпадение частоты генератора опорного напряжения с промежуточной частотой. Кроме того, известное устройство не позволяет распознавать сигналы с квадратурной амплитудной манипуляцией, а использование двух лучевых трубок увеличивает объем аппаратуры.
Наиболее близким по технической сущности к заявленному изобретению является выбранное в качестве прототипа устройство для определения класса радиосигналов [2], содержащее фазовращатель, первый и второй фазовые детекторы. Кроме того, устройство содержит элемент задержки и электронно-лучевую трубку.
Недостатками данного устройства является низкая помехоустойчивость, что приводит к невозможности определения класса сигналов с квадратурной амплитудной манипуляцией (КАМ) и сигналов со сдвигом (отсутствие скачка фазы на 180°).
Целью изобретения является повышение помехоустойчивости, расширение класса распознаваемых видов манипуляции.
Указанная цель достигается тем, что в известное устройство, содержащее первый фазовый детектор, первый вход которого является входом устройства, второй фазовый детектор и фазовращатель, выход которого подключен ко второму входу второго фазового детектора, согласно изобретению введены генератор опорного сигнала, первый и второй АЦП, первый, второй, третий и четвертый регистры памяти, вычислитель, предназначенный для вычисления фазовых скачков сигнала и расчета амплитудной гистограммы, графический индикатор и узел тактовой синхронизации, причем первый вход второго фазового детектора является входом устройства, выход генератора опорного сигнала соединен со вторым входом первого фазового детектора и входом фазовращателя, выход первого фазового детектора соединен с первым входом первого АЦП, выход которого соединен с первым входом первого регистра памяти, выход которого соединен с первым входом второго регистра памяти и первым входом вычислителя, выход второго регистра памяти соединен со вторым входом вычислителя, выход второго фазового детектора соединен с первым входом второго АЦП, выход которого соединен с первым входом третьего регистра памяти, выход которого соединен с первым входом четвертого регистра памяти и третьим входом вычислителя, выход четвертого регистра памяти соединен с четвертым входом вычислителя, первый выход вычислителя соединен со входом графического индикатора, вторые входы первого и второго АЦП, первого, второго, третьего и четвертого регистров памяти соединены с выходом узла тактовой синхронизации, второй выход вычислителя соединен с третьими (управляющими) входами первого, второго, третьего и четвертого регистров памяти.
Сравнительный с прототипом анализ показывает, что заявляемое устройство отличается наличием новых элементов: генератора опорного сигнала, двух АЦП, регистров памяти, узла тактовой синхронизации, вычислителя, графического индикатора с соответствующими связями, новым алгоритмом работы вычислителя и не известно из уровня техники. Таким образом, изобретение соответствует критерию “Новизна”.
Анализ известных технических решений (аналогов) в исследуемых и смежных областях позволяет сделать вывод, что введенные функциональные узлы известны. Однако введение их в известное устройство с указанными связями, а также использование специального алгоритма работы вычислителя придает устройству новые свойства. Введенные функциональные узлы взаимодействуют таким образом, что вычислитель, обрабатывая пары отчетов, взятые в тактовые моменты времени после фазовых детекторов, формирует значения всех возможных амплитуд и фазовых скачков сигнала, по которым происходит построение плоскостей распознавания и гистограмм амплитуд. Использование корреляционного метода позволяет увеличить помехоустойчивость устройства, а одновременный анализ возможных значений амплитуд и фаз - расширить класс распознаваемых видов манипуляции.
Таким образом, изобретение соответствует критерию “Изобретательский уровень”, т.к. оно для специалиста явным образом не следует из уровня техники.
Изобретение может быть использовано в цифровых системах передачи информации в составе демодулирующей аппаратуры, использующих сигналы с фазовой манипуляцией (ФМ), КАМ и амплитудно-фазовой манипуляцией (АФМ).
Таким образом, изобретение соответствует критерию “Промышленная применимость”.
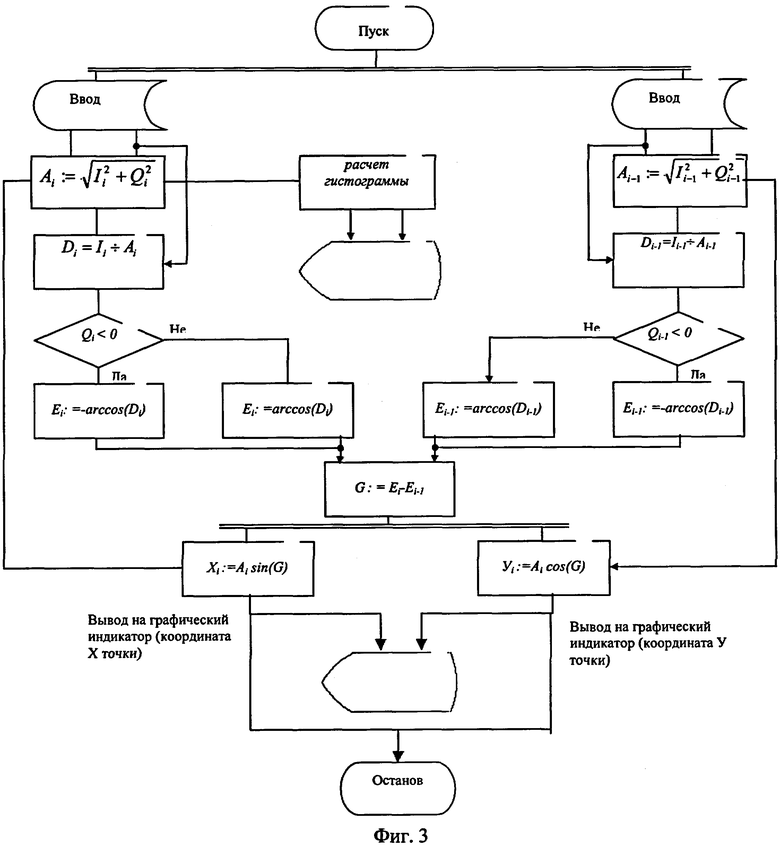
На фиг.1 представлена структурная схема предлагаемого устройства для распознавания видов манипуляции цифровых сигналов, на фиг.2 показано представление сигнала на фазовой плоскости, на фиг.3 представлен алгоритм работы вычислителя, на фиг.4 представлена гистограмма амплитуд, на фиг.5 представлена плоскость распознавания.
Устройство (фиг.1) содержит фазовые детекторы 1 и 2, фазовращатель на π/2 3, генератор опорного сигнала 4, АЦП 5 и 6, регистры памяти 7, 8, 9 и 10, узел тактовой синхронизации 11, построенный по одной из классических схем [3], вычислитель 12, графический индикатор 13.
Первые входы фазовых детекторов 1 и 2 являются входом устройства. Вторые входы фазовых детекторов 1, 2 соединены с генератором опорного сигнала 4 и фазовращателем на π/2 3 соответственно, вход фазовращателем на π/2 3 соединен с выходом генератора опорного сигнала 4. Последовательно соединены с выходом первого фазового детектора 1 первый АЦП 5, первый и второй регистры памяти 7, 9 соответственно, последовательно соединены с выходом второго фазового детектора 2 второй АЦП 6, третий и четвертый регистры памяти 8, 10 соответственно. Вычислитель 12, первый, второй, третий и четвертый входы которого соединены с выходами первого, второго, третьего и четвертого регистра памяти 7, 9, 8, 10 соответственно. Вторые входы первого и второго АЦП 5, 6, первого, второго, третьего и четвертого регистра памяти 7, 9, 8, 10 соединены с узлом тактовой синхронизации 11, а третьи входы первого, второго, третьего и четвертого регистра памяти 7, 9, 8, 10 соединены со вторым выходом вычислителя 12. Первый выход вычислителя 12 соединен со входом графического индикатора 13.
Информация о виде манипуляции принимаемого сигнала необходима для оптимизации алгоритмов работы систем восстановления несущей частоты, автоматической регулировки усиления, адаптивной коррекции в демодулирующей аппаратуре [4]. При использовании предлагаемого устройства нет необходимости в оценке значения несущей частоты сигнала, так как разность между частотой генератора опорного сигнала и несущей частотой при вычислении величины фазового скачка выражается в виде константы, что приводит к повороту плоскости распознавания относительно начала координат. Это совместно со схемами современного построения демодуляторов [4] позволяет легко реализовать предложенное устройство в виде составной части демодулятора, используя его фазовые детекторы, АЦП и систему тактовой синхронизации, инвариантную к виду манипуляции. Вычислитель возможно реализовать на сигнальном процессоре серии ADSP-218х.
Устройство работает следующим образом.
Представим входной сигнал в следующем виде:

Генератор опорного сигнала 4 формирует опорное колебание yc(t):

Фазовращатель 3 преобразует опорное колебание в ys(t):

Принимаемый сигнал (1) поступает на первые входы фазовых детекторов 1 и 2, на вторые входы фазовых детекторов 1, 2 поступают опорные сигналы (2), (3) соответственно. На выходе фазового детектора 1 формируется синфазная составляющая входного сигнала i(t):
i(t)=1/2A(t)соs(2πΔft)-1/2B(t)sin(2πΔf),
а на выходе фазового детектора 2 формируется квадратурная составляющая входного сигнала q(t):
q(t)=1/2B(t)соs(2πΔft)+1/2A(t)sin(2πΔf).
Синфазная i(t) и квадратурная q(t) составляющие поступают на АЦП 5 и 6 соответственно. На выходах АЦП формируются цифровые отсчеты синфазной и квадратурной составляющей сигнала в моменты времени, соответствующие середине информационной посылки. Аналого-цифровое преобразование в момент времени, соответствующий середине информационной посылки, обеспечивается сигналами тактовой частоты, формируемыми узлом тактовой синхронизации 11.
Далее цифровые отсчеты квадратурных составляющих по синфазному и квадратурному каналам последовательно поступают на регистры памяти 7, 9 и 8, 10. По команде вычислителя происходит параллельное считывание значений из регистров памяти 7, 8, 9 и 10 в вычислитель 12. Цифровые отсчеты в соответствии с алгоритмом работы вычислителя обрабатываются, а результаты обработки отображаются на графическом индикаторе 13.
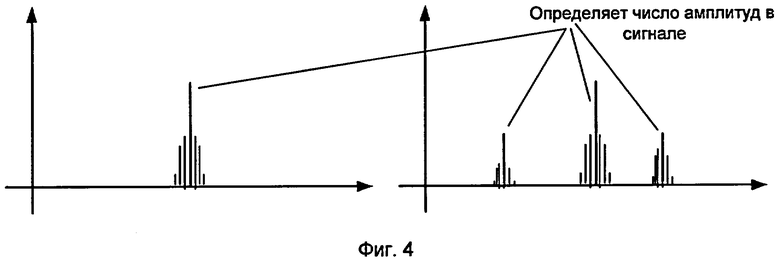
Алгоритм работы вычислителя (фиг.3).
Вычислитель работает следующим образом.
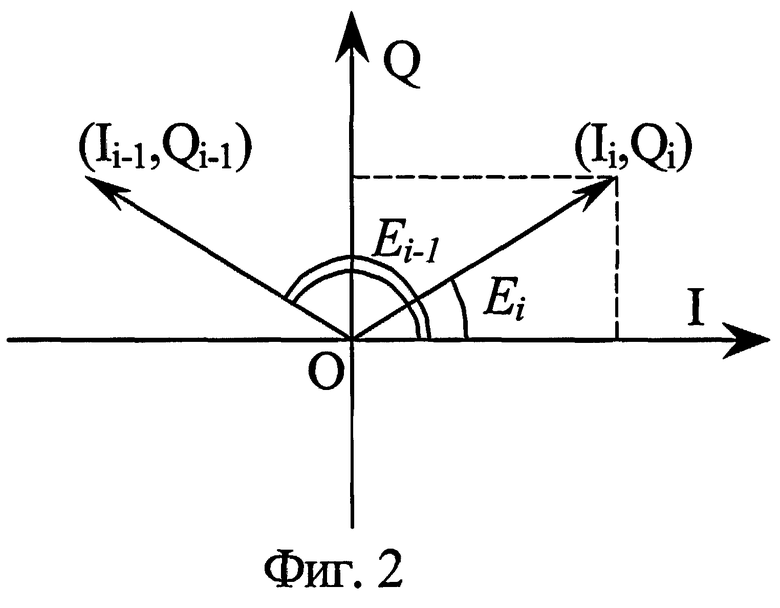
По команде вычислителя происходит считывание значений квадратурных составляющих Ii, Qi, Ii-1, qi-1 из регистров памяти. Для пояснения работы вычислителя квадратурные отсчеты удобно представить в виде сигнальных векторов на фазовой плоскости с началом в начале координат (О) и концом в точках с координатами (Ii, Qi) и (Ii-1, Qi-1) фиг.2.
Дальнейшая обработка идет параллельно по двум каналам, в одном канале обрабатываются Ii, Qi отсчеты, в другом - Ii-1, Qi-1 в соответствии со следующим алгоритмом фиг.3:
- в соответствии с выражением  осуществляется вычисление длины векторов Аi, и Аi-1, что соответствует вычислению амплитуды сигнала в i и i-1 моменты времени, полученные значения амплитуд используются в дальнейшем при вычислении углов и для расчета гистограмм;
осуществляется вычисление длины векторов Аi, и Аi-1, что соответствует вычислению амплитуды сигнала в i и i-1 моменты времени, полученные значения амплитуд используются в дальнейшем при вычислении углов и для расчета гистограмм;
- в соответствии с выражением D:=I-А осуществляется вычисление косинуса угла между осью OI и сигнальным вектором в i и i-1 моменты времени;
- в соответствии со следующим правилом вычисляются углы Ei и Еi-1 между осью OI и сигнальным вектором в i и i-1 моменты времени: если Qi<0, то Е:-=-arccos(D), в противном случае Е:=arccos(D);
- вычисление угла G=Еi-Еi-1 между сигнальными векторами в i и i-1 моменты времени, что соответствует фазовому скачку между двумя соседними информационными посылками сигнала;
- далее в соответствии с выражениями X:=Аsin(G), Y:=Аcos(G) вычисляются координаты для построения плоскости распознавания на графическом индикаторе;
- построение гистограмм производится в соответствии с правилом построения гистограмм [4], при этом граничные частоты подсчитываются по всем возможным значениям, полученным в результате вычисления амплитуд, результат построения отображается на графическом индикаторе.
В результате предлагаемой обработки входного сигнала на графическом индикаторе отображаются гистограмма амплитуд и плоскость распознавания. При совместном анализе гистограммы и плоскости распознавания принимается решение о виде модуляции принятого сигнала.
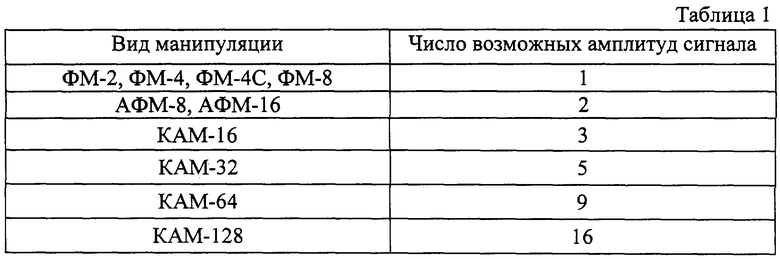
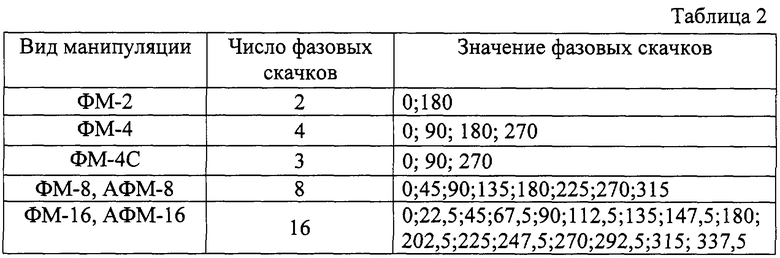
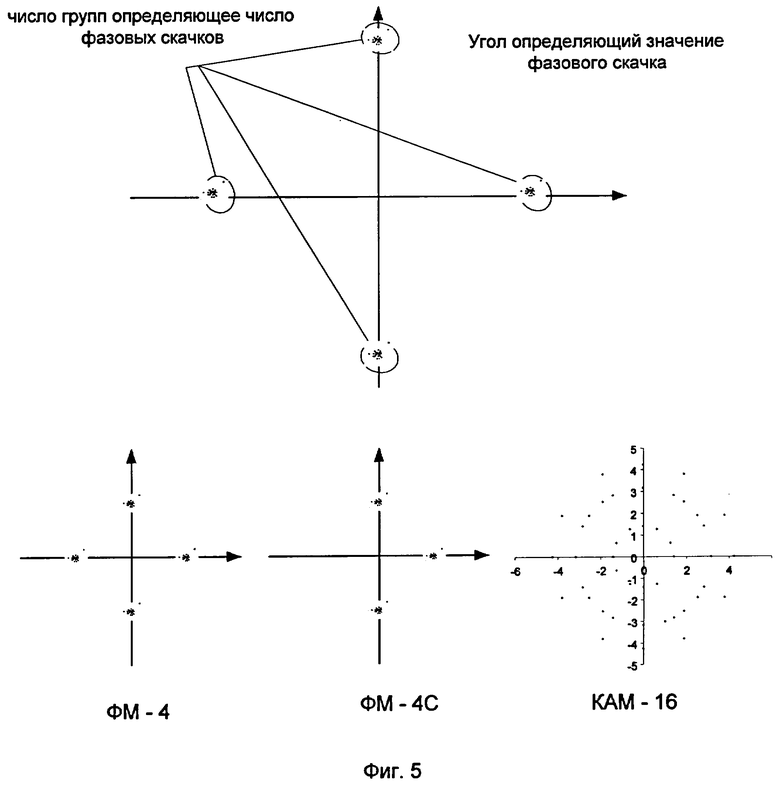
По гистограмме амплитуд определяется число возможных значений амплитуд сигнала (фиг.4). Число пиков в гистограмме определяет число возможных значений амплитуд в сигнале. В таблице 1 представлено число амплитуд в зависимости от вида манипуляции.
Для распознавания сигналов с КАМ достаточно использование гистограмм амплитуд. Распознавание сигналов ФМ и АФМ манипуляции требует использования плоскости распознавания.
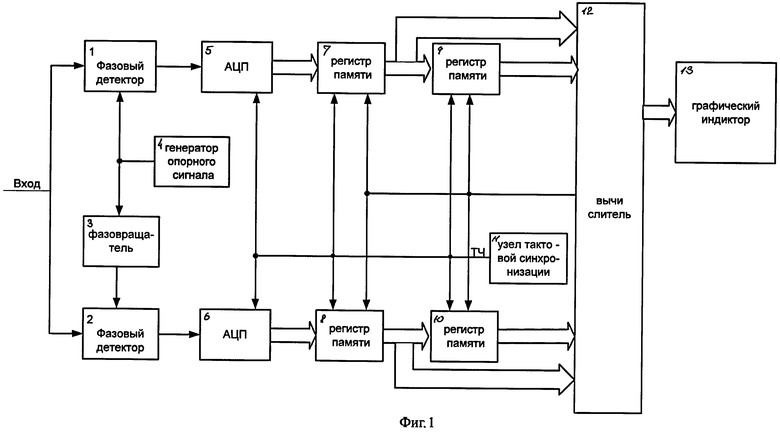
По плоскости распознавания определяется число и значение фазовых скачков во входном сигнале (фиг.5).
В таблице 2 представлено число и значение типовых фазовых скачков в зависимости от вида манипуляции.
Предложенное устройство помимо распознавания представленных в таблицах 1 и 2 сигналов позволяет проводить анализ сигналов с новыми видами манипуляции, в том числе с нетиповыми значениями фазовых скачков, определяя все возможные значения амплитуд и фазовых скачков исследуемых сигналов.
Устройство для распознавания видов манипуляции цифровых сигналов по сравнению с прототипом дает повышение помехоустойчивости, так как в работе устройства используются корреляционный метод оценки величины фазовых скачков и статистическая обработка сигнала.
Источники информации
1. Авт.св. 1765894, кл. H 03 M 3/00.
2. RU 93034025 А, МПК G 01 R 23/16 Устройство для определения класса радиосигналов (прототип).
3. Дж. Спилкер. Цифровая спутниковая связь. М.: Связь, 1979. - .363 с.
4. Прокис Джон. Цифровая связь. Пер. с англ./Под ред. Д.Д. Кловского. - М.: Радио и связь. 2000. - 800 с.
5. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - 13-е изд., исправленное. - М.: Наука, Гл. ред.физ.-мат. лит., 1986. - 544 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ВИДОВ МАНИПУЛЯЦИИ ЦИФРОВЫХ СИГНАЛОВ | 2005 |
|
RU2309414C2 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ НЕСТАБИЛЬНОСТИ НЕСУЩЕЙ ЧАСТОТЫ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2006 |
|
RU2336650C2 |
| РАДИОИМПУЛЬСНЫЙ АМПЛИФАЗОМЕТР | 1990 |
|
RU2042139C1 |
| Устройство синхронизации несущей частоты | 1985 |
|
SU1356249A1 |
| Цифровой демодулятор сигналов с амплитудной - относительной фазовой манипуляцией | 2022 |
|
RU2790205C1 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С МНОГОПОЗИЦИОННОЙ ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2021 |
|
RU2776968C1 |
| ДЕМОДУЛЯТОР ДВУХПОЗИЦИОННЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2018 |
|
RU2699066C1 |
| Устройство для распознания радиосигналов | 1989 |
|
SU1765894A2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
Изобретение относится к радиотехнике. Технический результат заключается в повышении помехоустойчивости и расширении распознаваемых видов манипуляции. Сущность изобретения заключается в том, что в известное устройство, содержащее первый фазовый детектор (ФД), второй ФД и фазовращатель, дополнительно вводят генератор опорного сигнала, первый и второй АЦП, первый, второй, третий и четвертый регистры памяти, узел тактовой синхронизации, вычислитель и графический индикатор. Использование предложенного схемного решения, а также специального алгоритма работы вычислителя позволяет определить следующие виды манипуляции: ФМ, ФМ со сдвигом, АФМ, КАМ. 5 ил., 2 табл.
| RU 93034025 А, 10.02.1997 | |||
| КЕРАМИЧЕСКОЕ ИЗДЕЛИЕ ДЛЯ ПОЛУЧЕНИЯ ОБЛИЦОВОЧНЫХ ПЛИТОК СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ (ВАРИАНТЫ) | 2007 |
|
RU2347046C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ВИДОВ ПЕРЕДАЧ | 1995 |
|
RU2099786C1 |

