Изобретение относится к области сельскохозяйственного машиностроения, а именно к средствам автоматизации, и предназначено для применения на сельскохозяйственных машинах и орудиях.
Известно большое количество устройств контроля глубины хода рабочих органов почвообрабатывающих сельскохозяйственных машин, обеспечивающих решение либо одной, либо сразу двух следующих задач:
- оперативный контроль глубины хода рабочих органов с целью управления технологическим процессом обработки почвы;
- оперативная оценка качества проведенной обработки поля определенной площади.
Так, известен сигнализатор изменения глубины вспашки (журнал «Техника в сельском хозяйстве», 1982 г., №4, стр.27 «Сигнализатор изменения глубины вспашки»), содержащий первичный измерительный преобразователь (пара герконовых магнитных датчиков, закрепленных на рабочем органе плуга), усилительно-преобразовательное устройство (фильтр) на транзисторах и панель индикаторов (пара световых сигнализаторов - "мелко" и "глубоко", устанавливаемых в кабине трактора).
Недостатком такого устройства является то, что оно срабатывает только при выходе контролируемого параметра за пределы поля допуска и совершенно не способно предупредить тракториста о приближении к границам этого поля. Использование такого сигнализатора для регулирования глубины хода плуга в процессе вспашки, во-первых, делает работу тракториста крайне утомительной, а, во-вторых, не гарантирует высокого качества проведенной обработки.
Известно устройство автоматического контроля глубины хода рабочих органов сельскохозяйственных машин и орудий (авторское свидетельство СССР №736899, кл. А01В 65/06, 1980), содержащее датчик глубины хода, элементы разрешения, генератор импульсов, реверсивный счетчик и сигнализаторы выглублення и заглубления.
Данному устройству присущ тот же недостаток.
Известно устройство для измерения глубины пахоты (авторское свидетельство СССР №452290, кл. А01В 65/06, G01В 7/28 1974), содержащее копирующий механизм на плуге, преобразовательный блок и регистратор.
Недостатком такого устройства является то, что копирующий механизм, выполняющий функции первичного измерительного преобразователя, представляет собой сложную систему из многих герконовых датчиков, закрепленных на рабочем органе машины, что не может обеспечить высокой надежности, если учесть реальные условия работы рабочего органа. Кроме того, данное устройство содержит регистрирующую аппаратуру, которая неудобна для непосредственного использования в работе тракториста.
Известно устройство допускового контроля глубины хода рабочих органов (журнал «Механизация и электрификация сельского хозяйства», 1984, №10, стр.18 «Контроль глубины хода рабочих органов почвообрабатывающих машин»), взятое в качестве прототипа и содержащее датчики выхода глубины за пределы верхней и нижней границ допуска, элементы И, генератор импульсов и совокупность реверсивных счетчиков, которые посредством двух цифровых блоков сравнения связаны с сигнализаторами выглубления и заглубления. Устройство оценивает качество работы плуга по величине отношения

где ТΔ - время нахождения рабочего органа в поле допуска Δ;
Т - общее время наблюдения;
Недостатком всех таких устройств является то, что в них совершенно не учитывается ни скорость машины, ни проделанный ею путь. Любое замедление или ускорение машины может существенно исказить результаты оценки качества проведенной обработки почвы, например медленное прохождение нескольких трудных метров пути может перечеркнуть результаты хорошей работы машины на предыдущих ста метрах, пройденных на хорошей скорости.
Технической задачей изобретения является улучшение эргономических показателей, информативности, точности и надежности устройства автоматического контроля глубины хода рабочих органов сельскохозяйственных машин за счет изменения логики работы световых сигнализаторов и нового алгоритма обработки диагностической информации, привязанного не ко времени наблюдения, а к пройденному расстоянию.
На чертеже представлена структурная схема и временная диаграмма работы предлагаемого устройства.
Устройство содержит аналоговый датчик глубины 1, выход которого подключен к неинвертирующему входу дифференциального усилителя 2, тогда как инвертирующий вход усилителя 2 подключен к источнику опорных напряжений 3. Выход усилителя 2 через сглаживающий фильтр нижних частот 4 подключен к инвертирующему входу компаратора 5, неинвертирующий вход которого подключен к выходу генератора пилообразного напряжения 6.
Выход компаратора 5 соединен с общей точкой двух светодиодных индикаторов 7 и 8, снабженных токоограничивающими резисторами и включенных последовательно между шиной питания и общей шиной. Выход сглаживающего фильтра 4 соединен также с сигнальным входом двухпорогового компаратора 9, установочные входы которого подключены к источнику опорных напряжений 3.
Выход двухпорогового компаратора 9 подключен к одному из входов схемы совпадения 10, тогда как к другому входу схемы 10 подключен выход импульсного датчика пройденного расстояния 11.
Выходы схемы совпадения 10 и импульсного датчика 11 соответственно подключены к первому и второму входам вычислительного устройства 12.
Устройство работает следующим образом.
Выходной сигнал датчика глубины 1 усиливается дифференциальным усилителем 2 и сглаживается фильтром нижних частот 4, чтобы устранить кратковременные всплески сигнала, обусловленные микронеровностями рельефа, вибрациями, электромагнитными помехами и т.п. Отфильтрованный сигнал поступает на вход компаратора 5, где сравнивается с пилообразным напряжением генератора 6, частота которого выбирается больше 50 Гц, чтобы избежать мерцаний светодиодных индикаторов. На второй вход дифференциального усилителя 2 подается опорное напряжение Uo, которое устанавливается в процессе настройки схемы таким, чтобы при глубине хода рабочего органа машины посередине поля допуска напряжение на выходе фильтра 4 было посередине зубцов пилы. При этом на выходе компаратора 5 ровно половину периода держится высокий уровень (при этом горит светодиод 8), а вторую половину периода - низкий (при этом горит светодиод 7), но при смене этих состояний с частотой более 50 Гц суммарный визуальный эффект таков, что оператору представляется, что оба светодиода горят в полнакала с одинаковой яркостью. При увеличении глубины напряжение на выходе фильтра 4 увеличивается и длительность состояния высокого уровня на выходе компаратора 5 сокращается, а низкого, наоборот, увеличивается. При этом суммарная визуальная яркость светодиода 7 увеличивается, а светодиода 8 - уменьшается.
Коэффициент усиления усилителя 2 устанавливается на этапе настройки схемы таким, что при достижении верхней границы заданного поля допуска на глубину светодиод 8 гаснет, а светодиод 7 принимает полный накал.
При отклонении глубины в другую сторону от заданного значения схема реагирует таким образом, что светодиод 7 уменьшает яркость, а светодиод 8 увеличивает. При достижении нижней границы поля допуска светодиод 7 гаснет, а светодиод 8 принимает полный накал.
Такая логика работы световых сигнализаторов выглубления и заглубления существенно облегчает работу тракториста и оказывается особенно удобной в случае, когда приходится контролировать глубину хода для машин с множественными рабочими органами, как например КПС-5. Действительно, в этом случае панно световых сигнализаторов принимает вид двух рядов светодиодов, один под другим, по которым можно одновременно следить за равномерностью обработки почвы каждым рабочим органом.
Вторая часть схемы предназначена для оценки качества проведенной обработки поля заданных размеров. Сигнал с выхода фильтра 4 подается на вход двухпорогового компаратора 9, где сравнивается с Uверх и Uниж, которые задаются на этапе настройки в соответствии с верхней и нижней границами поля допуска на глубину. Если глубина хода рабочего органа не выходит за эти границы, на выходе компаратора 9 поддерживается высокий уровень, который подается на один вход схемы совпадения 10. На другой вход схемы совпадения 10 подаются импульсы от датчика пройденного расстояния 11, который связан с механизмом перемещения машины (такой датчик может быть выполнен, например, на базе холловского датчика магнитного поля и системы постоянных магнитов, закрепленных на ободе ведомого колеса машины).
Датчик 11 вырабатывает импульсы только при перемещении машины. Если при этом рабочий орган машины не выходит из заданного поля допуска заданной глубины хода, эти импульсы через схему совпадения 10 проходят на первый вход вычислительного устройства 12. При выходе рабочего органа за поле допуска импульсы от датчика 11 на выход схемы 10 не проходят. На второй вход вычислительного устройства 12 поступают все импульсы от датчика 11, отсчитывая тем самым пройденное машиной расстояние.
Вычислительное устройство 12 определяет отношение
где NΔ - число импульсов, прошедших через схему совпадения 10,
N - общее число импульсов датчика 11.
Это отношение дает оценку качества технологического процесса обработки почвы. Задавая N, то есть задавая определенный контрольный участок, можно таким образом определить, какая доля площади поля обработана с соблюдением заданного технологического допуска.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ОСВЕЩЕНИЕМ ПО СРЕДНЕМУ ЗНАЧЕНИЮ ТОКА | 2013 |
|
RU2540401C2 |
| УСТРОЙСТВО ДЛЯ ОТБРАКОВКИ ДВУХАНОДНЫХ СТАБИЛИТРОНОВ | 2010 |
|
RU2445640C1 |
| УСТРОЙСТВО ДЛЯ ОТБРАКОВКИ ДВУХАНОДНЫХ СТАБИЛИТРОНОВ | 2010 |
|
RU2450281C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОПАДАНИЯ ФАЗЫ КОРОТКОГО ЗАМЫКАНИЯ И ВЕЛИЧИНЫ ТОКА ТРЕХФАЗНОЙ НАГРУЗКИ | 1990 |
|
SU1792214A1 |
| ЭЛЕКТРИЧЕСКАЯ СХЕМА БЛОКА ОБРАБОТКИ СИГНАЛА ДАТЧИКА ИНТЕНСИВНОСТИ УЛЬТРАФИОЛЕТОВОГО ИЗЛУЧЕНИЯ | 1998 |
|
RU2154811C2 |
| Переносной шахтный сигнализатор метана | 1990 |
|
SU1800064A1 |
| Устройство для защитного отключения электроустановки от сети переменного тока с изолированной нейтралью | 1988 |
|
SU1707683A1 |
| УСТРОЙСТВО КОНТРОЛЯ СОПРОТИВЛЕНИЯ ИЗОЛЯЦИИ | 2009 |
|
RU2391676C1 |
| СПОСОБ И УСТРОЙСТВО ЭКСПРЕСС-ДИАГНОСТИКИ ИДЕНТИЧНОСТИ ТРАНЗИСТОРОВ ПРИ ИХ ПОДБОРЕ В ПАРУ | 2009 |
|
RU2450280C2 |
| Переносной шахтный сигнализатор метана | 1987 |
|
SU1444542A2 |
Устройство содержит аналоговый датчик глубины, выход которого подключен к неинвертирующему входу дифференциального усилителя, причем инвертирующий вход усилителя подключен к источнику опорных напряжений, а выход усилителя подключен к входу сглаживающего фильтра, два светодиодных индикатора с токоограничивающими резисторами, включенных последовательно между шиной питания и общей шиной, двухпороговый компаратор, сигнальный вход которого подключен к выходу сглаживающего фильтра, тогда как установочные входы компаратора подключены к источнику опорных напряжений, а выход компаратора подключен к одному входу схемы совпадения, выход которой подключен к первому входу вычислительного устройства. В устройство включены генератор пилообразного напряжения, компаратор, неинвертирующий вход которого подключен к выходу генератора пилообразного напряжения, а инвертирующий - к выходу сглаживающего фильтра. Выход этого компаратора подключен к общей точке светодиодных индикаторов. Устройство также содержит импульсный датчик пройденного расстояния, выход которого подключен к другому входу схемы совпадения и ко второму входу вычислительного устройства. Упрощается конструкция устройства, повышается надежность и удобство при его эксплуатации. 1 ил.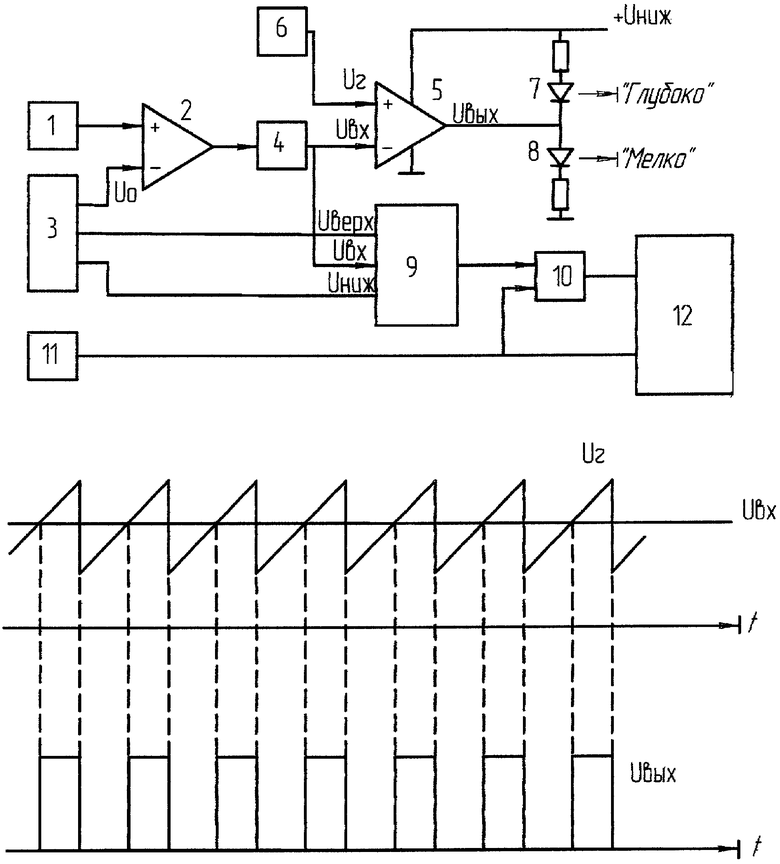
Устройство автоматического контроля глубины хода рабочих органов сельскохозяйственных машин, содержащее аналоговый датчик глубины, выход которого подключен к неинвертирующему входу дифференциального усилителя, причем инвертирующий вход усилителя подключен к источнику опорных напряжений, а выход усилителя подключен к входу сглаживающего фильтра, два светодиодных индикатора с токоограничивающими резисторами, включенные последовательно между шиной питания и общей шиной, двухпороговый компаратор, сигнальный вход которого подключен к выходу сглаживающего фильтра, тогда как установочные входы компаратора подключены к источнику опорных напряжений, а выход компаратора подключен к одному входу схемы совпадения, выход которой подключен к первому входу вычислительного устройства, отличающееся тем, что в устройство включены генератор пилообразного напряжения, компаратор, неинвертирующий вход которого подключен к выходу генератора пилообразного напряжения, а инвертирующий - к выходу сглаживающего фильтра, причем выход этого компаратора подключен к общей точке светодиодных индикаторов, и импульсный датчик пройденного расстояния, выход которого подключен к другому входу схемы совпадения и ко второму входу вычислительного устройства.
| ПЕЛЕЛЯГИН Н.И | |||
| В ж | |||
| Механизация и электрификация сельского хозяйства, 1984, №10, с.18-19 | |||
| Устройство автоматического контроля глубины хода рабочих органов сельскохозяйственных машин и орудий | 1983 |
|
SU1094587A2 |
| Устройство автоматического контроля глубины хода рабочих органов сельскохозяйственных машин и орудий | 1986 |
|
SU1329646A1 |
| Устройство контроля глубины хода рабочих органов сельскохозяйственных машин | 1987 |
|
SU1440374A1 |
| ПНЕВМОСЕПАРИРУЮЩЕЕ УСТРОЙСТВО ЗЕРНО- И СЕМЯОЧИСТИТЕЛЬНОЙ МАШИНЫ | 2010 |
|
RU2460592C2 |

