Изобретение относится к средствам создания силы тяги, используемой для движения транспортных средств в сплошных текучих средах.
Уровень техники
Известно (Л.Прандтль. Гидроаэромеханика. НИЦ «Регулярная и хаотическая динамика» Москва-Ижевск, 2002, 572 стр.) устройство пропеллер Воис-Шнайдера (Voith-Schneider), применяемый для таких кораблей, которые должны иметь особенно хорошую маневренность. Сила тяги возникает при движении лопастей пропеллера, вертикально погруженных в воду. При этом продольные оси лопастей симметрично расположены и закреплены на несущей конструкции, осуществляющей принудительное вращательное движение осей с постоянной угловой скоростью. В результате при таком движении лопастями, погруженными в воду, осуществляется гребок, подобный гребку весла. Этому способствует конструкция, задающая переменный (от положительного до отрицательного) угол атаки крыла по отношению к касательной к круговой траектории движения осей лопастей. Такое свойство конструкции позволяет управлять направлением вектора тяги устройства путем смещения точки управления углами атаки лопастей от центра, т.е. от оси вращения несущей конструкции. Для снижения гидродинамического сопротивления движению лопастей в воде профиль лопастей выбирается гидродинамически обтекаемым.
Недостатками известного устройства являются
- низкоэффективный гребковый способ создания силы тяги;
- снижение эффективности «гребка» из-за регулярной изменяемости азимутального направления вектора тяги около его среднего направления;
- потери в эффективности из-за излишней турбулизации воды вплоть до ее вспенивания;
- жесткая форма тела лопасти, исключающая ресурс снижения их гидродинамического сопротивления.
Известна (Chul Yong Yun, Illkyung Park, Но Yong Lee, Jai Sang Jung, In Seong Hwang, Seung Jo Kim and Sung Nam Jung, "A New VTOL UAV Cyclocopter with Cycloidal Blades System", AHS 60th Annual Forum and Technology Display, June 7-10, 2004, Baltimore, MD; http://ksea.org/ukc2004/en/Proceedings/01 AST/AST25_SeungJoKim.pdf.) циклоидальная система лопастей для циклокоптера. Такая система аналогична пропеллеру Воис-Шнайдера, только вращение лопастей осуществляется вокруг оси, расположенной не вертикально, а горизонтально. Кроме того, система применяется в атмосфере.
Недостатками известного устройства являются
- низкоэффективный гребковый способ создания силы тяги;
- снижение эффективности «гребка» из-за регулярной изменяемости азимутального направления вектора тяги около его среднего направления;
- потери в эффективности из-за излишней турбулизации атмосферы;
- жесткая форма тела лопасти, исключающая ресурс снижения их аэродинамического сопротивления.
Наиболее близким к предлагаемому техническому решению является наш «Способ и устройство для перемещения затопленного тела» (патент №2259302 RU), в котором к плоскому или объемному гидродинамически обтекаемому гибкому упругому телу, находящемуся в текучей среде, в поперечном к поверхности профиля направлении в определенной области, прикладывается сила. Это приводит к возникновению у тела силы тяги в направлении вперед, поперечном к направлению прикладываемой силы, и такому изменению формы, которая обладает минимальным сопротивлением при его движении в текучей среде.
Известное решение допускает расширение - вариант его применимости - в качестве лопасти циклоидального пропеллера.
Цель предлагаемого решения - разработка устройства, энергия вращательного движения которого эффективно преобразуется движителями-лопастями в энергию поступательного движения судна или аппарата, несущего это устройство, лишенного вышеперечисленных недостатков известных технических решений.
Цель достигается применением в качестве отдельной лопасти устройства плоского или объемного гидро- или аэродинамически обтекаемого гибкого упругого в поперечном направлении тела, жестко закрепленного на собственной оси вращения, разделяющей тело на узкую «носовую» и широкую «хвостовую» части, причем в состоянии покоя лопасти идентичны по отношению к параллельному пространственному переносу, а на сами оси, закрепленные в роторе с возможностью свободного вращения, насажены одинаковые звездочки, связанные цепной передачей в одну систему, в которой тела лопастей в нерабочем состоянии устройства всегда располагаются в параллельных плоскостях независимо от угла поворота ротора, при этом ротор может быть как барабанного типа для двухстороннего захвата, так и плоскостной для одностороннего захвата осей вращения лопастей, имеющих форму прямоугольника для барабанного или в виде пера птицы для плоскостного ротора, насаженного с возможностью свободного вращения на собственную ось, на которую насажена ведущая звездочка, связанная цепной передачей с аналогичной ведомой звездочкой, насаженной на одну из n осей вращения лопастей, в результате чего поворот на произвольный угол оси вращения ротора относительно корпуса судна или аппарата, несущего все устройство, на тот же угол изменяет пространственную направленность всей группы лопастей, причем ротор приводится во вращательное движение механическим, электромеханическим или другого рода приводом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ.
А. При разработке «Способа и устройства для перемещения затопленного тела» (патент №2259302 RU) нами получено, что при воздействии в поперечном направлении на плоское или объемное гидродинамически обтекаемое гибкое упругое тело типа крыла, находящееся в текучей среде, в определенной его области приводит к возникновению силы тяги, вынуждающей тело двигаться вперед в поперечном к воздействующей силе направлении.
Поясним это.
Прежде всего, особого внимания требует вопрос определения области приложения внешнего усилия к движителю.
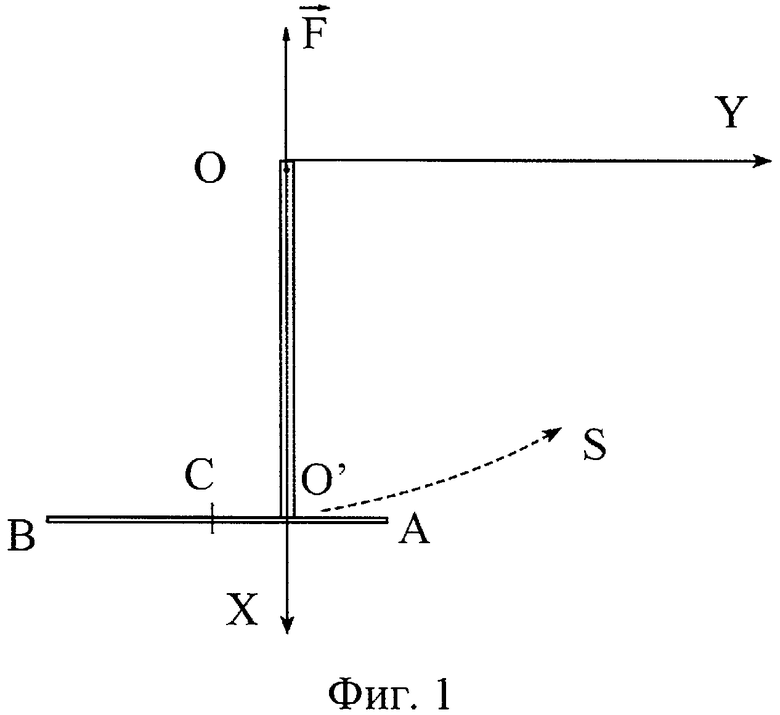
Рассмотрим (фиг.1) тело, находящееся под действием внешней силы. Для определенности, пусть это будет плоская пластина прямоугольной формы с размерами l x k, где l - поперечный, a k - продольный ее размеры, причем l<k. Рассматривать пластину будем в плоскости XOY прямоугольной системы координат, образованной осями X, Y и Z. В продольном направлении пластина направлена параллельно оси Z, идущей из листа. В результате на плоскости XOY проекция пластины будет выглядеть как отрезок АВ прямой линии, длиной l. Начало координат, точку О, выберем так, что она будет совпадать с точкой выбора тяги, с начальной длиной ρо. Ось ОХ направим по вертикали вниз так, что прямая, соединяющая точку О с пластиной, будет совпадать с осью ОХ. Ось OY направим в сторону возникающего поступательного движения пластины так, что траектория движения, как плоская кривая, будет расположена в плоскости XOY. Точкой С обозначим геометрический центр отрезка АВ, являющийся в нашем случае одновременно центром масс этого отрезка. Точкой О' обозначим точку захвата тягой (тросом) пластины на отрезке АВ.
Существует две крайние ситуации: первая - это когда тяга захватывает пластину в точке, соответствующей максимальному миделевому сечению, т.е. в точке С, где смещение СО'=(точки захвата пластины тягой равно δ=0. В этом случае прикладываемая к пластине внешняя сила будет порождать максимальную противоположно направленную силу реакции среды. Это приводит к максимальным потерям в связи с совершением работы, затрачиваемой на преодоление силы реакции среды, и сила тяги не возникает. Эффективность выполнения работ в таком случае низкая. Вторая ситуация - это когда тяга захватывает пластину в точке, расположенной в середине фронтовой линии пластины. На плоскости XOY это положение соответствует точке А отрезка АВ, где δ=l/2. В этом случае сила натяжения тяги, внешняя сила, минимальна. При выводе пластины из горизонтального положения осуществляется, прежде всего, поворот пластины до положения, близкого к вертикальному. Сила тяги не возникает. Т.е. эффективность приложения силы и в этом случае низкая. Следует ожидать, что между двумя крайними случаями, когда δ=0 и δ=l/2, должна существовать точка, захват пластины в которой будет способствовать максимальной эффективности за счет возникновения силы тяги как результата действия двух неизбежно существующих начальных сил - внешней силы и силы реакции среды.
Эффективность действия внешней силы будем оценивать по максимуму возникающей силы тяги в зависимости от параметра 5. Физически это должно выглядеть так, что при приложении внешнего усилия к движителю возникает сила реакции среды. Векторы этих сил складываются и дают вектор результирующей силы, приводящий к поступательному движению пластины по криволинейной траектории.
Оценим то расстояние δ, на котором должна располагаться точка захвата внешней тягой пластины по отношению к геометрическому центру этой пластины.
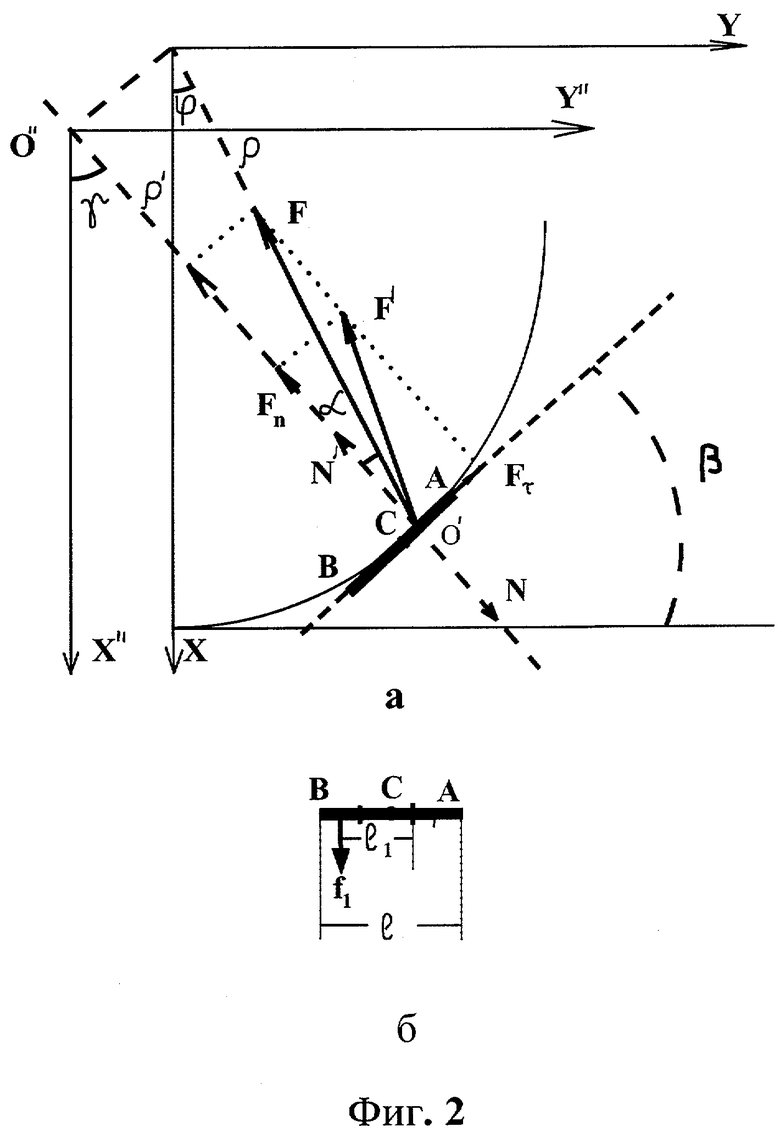
На фиг.2, а приведены:
XOY - исходная прямоугольная система координат, точка О - точка выбора тяги, например, троса;
X''O''Y'' - система координат, связанная с мгновенной осью вращения, проходящей через начало координат О''. Пусть положение тела в пространстве будет характеризоваться какой-либо точкой этого тела, например, как в нашем случае, точкой его захвата. Тогда введение системы координат X''O''Y'' связано с тем, что при криволинейном движении тела имеется ось, которая в рассматриваемый момент движения находится в покое, т.е. тело в этот момент как бы совершает вращательное движение вокруг этой оси, проходящей через точку О''. Такая ось может, как в нашем случае, находиться за пределами тела. А результирующая криволинейная траектория движения тела будет представлять собой множество точек, последовательно образованных совокупностью положений в пространстве точки захвата.
ρ - мгновенная длина троса;
ρ' - расстояние отточки захвата пластины до мгновенной оси вращения О'';
F - вектор прикладываемой тяговой силы троса (здесь и далее жирными буквами будут обозначаться векторные величины);
N - вектор силы реакции среды;
На фиг.2,б приведены:
АВ=l - ширина пластины;
l1 - плечо силы f1;
f1 - вектор силы, задающей вращение пластины вокруг точки О', связанной с захватом пластины тросом;
С - центр масс пластины и одновременно ее геометрический центр;
О'С=δ - расстояние смещения точки захвата пластины от центра масс С;
Fn=F•Cosα - N' - результирующая нормальная составляющая силы, действующей на пластину со стороны троса;
Fτ - тангенциальная составляющая силы действующей на пластину со стороны троса;
F'=Fn+Fτ - та результирующая сила, которая вынуждает тело двигаться поступательно по криволинейной траектории, отличающейся от окружности;
β - угол между мгновенным направлением движения пластины и осью Y;
γ - мгновенное значение угла поворота мгновенного радиуса ρ' по отношению к оси O''Х'';
ϕ - угол отклонения троса от вертикальной оси X;
α - угол между тросом и мгновенным радиус-вектором ρ'.
Момент M1 (нежирными буквами в дальнейшем обозначаются модули соответствующих векторов) силы Fτ, прикладываемой к пластине и имеющей плечо ρ', определяется произведением силы на плечо. Тот же момент силы определяется моментом инерции JO" системы и приобретенным угловым ускорением d2γ/dt2. Тогда имеет место равенство

(Н.И.Карякин, К.Н.Быстров, П.С.Киреев. Краткий справочник по физике. "Высшая школа". М., 1962).
Другой момент М2 силы f1, действующей на пластину с плечом l1, причем в этом случае момент инерции - Jo' и угловое ускорение - d2γ/dt2, определяется равенством

Рассмотрим случай равенства углов γ=β и соответствующих угловых ускорений d2γ/dt2=d2β/dt2
Случай γ<β соответствует тому, что d2γ/dt2<d2β/dt2, т.е. в соответствии с геометрией фиг.2 а, б пластина под действием троса будет разворачиваться по часовой стрелке. При этом пластина будет приобретать поступательное движение назад. Случай γ>β соответствует тому, что d2γ/dt2>d2β/dt2, т.е. пластина под действием троса будет разворачиваться против часовой стрелки. Но при этом согласно геометрии фиг.2 а, б будет уменьшаться сила реакции среды N. В результате сила F становится просто силой, тянущей за собой тело, но не той силой, которая действует в поперечном к поступательному направлению движению затопленного тела.
Тогда имеет место равенство

Поскольку


(m - эффективная равномерно распределенная масса пластины, включающая присоединенную массу [Л.Д.Ландау, Е.М.Лифшиц. Гидродинамика. "Наука". 1988]),

то из равенства (3) с учетом (4), (5) и (6) вытекает

Обозначив всю совокупность сомножителей, не зависящих от **, буквой К, равной

перепишем равенство (7) в виде

Тогда первая производная Fτ' функции Fτ по δ может быть записана в виде

Равенство нулю первой производной Fτ'=0 определяет, то значение величины δ, при котором функция Fτ имеет экстремум (И.Н. Бронштейн, К.А.Семендяев. Справочник по математике. "Наука". 1964). Опуская очевидные промежуточные выражения и преобразования, запишем,

А поскольку вторая производная Fτ" меньше нуля

то полученное значение величины δ определяет максимум функции Fτ от δ. Если же учесть, что сила тяги Fτ=F·Sinα, то оказывается, что при
δ/l=0,2887 (13)
затопленное тело приобретает максимальное тангенциальное ускорение при заданной прикладываемой силе F и растет с ростом угла α пропорционально Sinα.
Этот же угол α задает угол между вектором силы N реакции среды, воздействующей на пластину, и прямой, вдоль которой действует прикладываемая к пластине сила F. Отсюда следует, что упругость и гибкость пластины должны в процессе работы задавать такое значение угла α для хорды, которое соответствует условию возникновения максимальной силы тяги.
Таким образом, оказывается, что размещение точки захвата пластины в соответствии с условием δ=0,2887·l позволяет достичь оптимальных условий перемещения пластины под действием результирующей двух сил - тяговой силы троса и силы реакции среды. В этом случае поступательное движение тела энергетически оптимально уже хотя бы потому, что движение пластины осуществляется в соответствии с теми условиями, которые приводят к минимуму энергетических потерь движущегося тела. Т.е., имея в своем распоряжении оборудование, позволяющее развить тяговую силу F, следует определять точку захвата пластины на основании полученного условия. Тогда возникающая скорость перемещения пластины будет максимальной, а соответствующие энергетические затраты на преодоление сил сопротивления среды - минимальными.
Необходимо обратить внимание на то, что точка, характеризующаяся условием δ=0,2887·l, оказывается близкой к области так называемого фокуса профиля крыла, определяющегося из других соображений. Это понятие используется в самолетостроении (АЭРОДИНАМИКА. А.М.Мхитарян. Машиностроение. М., 1976. 448 с.) при выборе оптимальной формы крыла в целях, в частности, определения такого профиля крыла, при котором крыло будет иметь максимальную подъемную силу при наилучшем его качестве. При этом крыло самолета жесткое, а не гибкое, что влияет на эффективность крыла, лишая его универсальности.
В ходе экспериментов мы выявили, что гибкое упругое тело, захваченное и находящееся под воздействием внешнего поперечного усилия, имеет наилучшие динамические показатели - максимальную силу тяги и минимальную потерю энергии при заданной величине воздействующей силы.
Б. Дальнейшие наши исследования заключались в том, чтобы применить результат пункта А в варианте не одностороннего, а знакопеременного воздействия на тело с целью создания силы тяги, вынуждающей тело двигаться не по криволинейной траектории с монотонным изменением направления движения, а в среднем поступательно в одном прямом направлении движения.
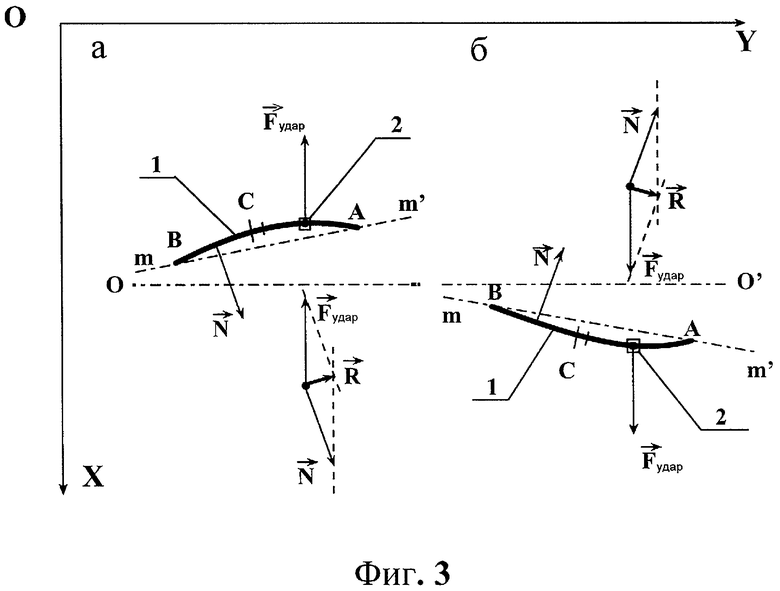
Пусть (фиг.3) пластина будет закреплена тягой в виде не троса, а подвижного вдоль оси ОХ штока, через который осуществляется воздействие на пластину. Пусть также шток будет лишен возможности вращения в точке О системы координат XOY. А сама точка О пусть будет жестко связана, например, с плавсредством. Тогда (фиг.3), если реализуем внешнее воздействие в виде знакопеременной периодической силой, принуждающей точку захвата пластины к возвратно-поступательному движению, то следует ожидать возникновения результирующей силы тяги вперед. Эта сила тяги, приложенная к плавательному аппарату, приведет к его поступательному движению. При этом совершаемые вынужденные колебания точки захвата пластины будут являться движениями, поперечными по отношению к направлению движения плавсредства, что идеально соответствует машущему движению крыла птицы и хвоста рыбы. Одновременно это означает, что все средства возбуждения силы тяги в текучих средах, ориентированные на колебательное вееропобное движение движителя принципиально противоречат условию максимальной эффективности δ=0,2887·1 и, следовательно, по определению имеют меньший коэффициент полезного действия, чем в предлагаемом случае.
В таком случае не возникает необходимость задавать угол атаки движителя, поскольку движитель под воздействием внешних сил и условий сам, деформируясь, принимает энергетически выгодные форму и угол атаки.
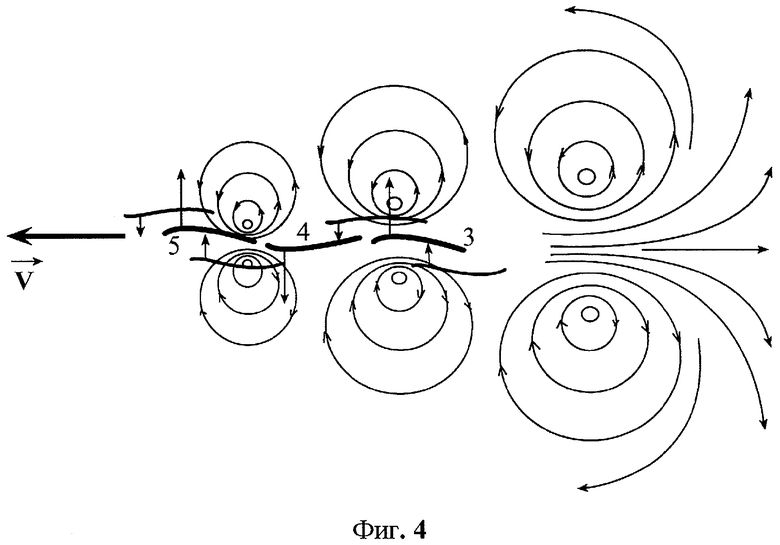
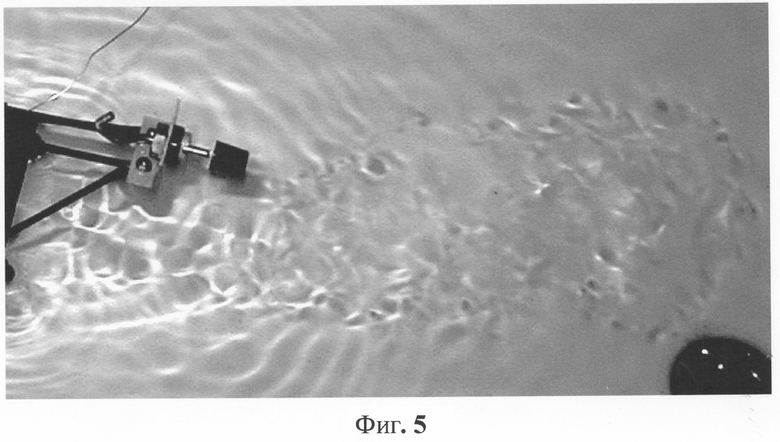
При работе движителя возникает вихревой поток (фиг.4), формирующийся последовательно сходящими с движителя замкнутыми вихрями типа тора. При этом направление вихревого потока (фиг.5) прямо противоположно направлению силы тяги. Поток формируется группой вихрей, образующих за движителем дорожку типа дорожки Кармана (Н.Е.Кочин, Н.В.Розе. Введение в теоретическую гидромеханику. Гос. технико-теоретическое издательство. М., Л. 1932 г. 316 стр.). Здесь уместна аналогия с картиной возникновения подъемной силы крыла, движущегося в текучей среде с некоторой скоростью: при небольших углах атаки, примерно 5-10 градусов, у крыла возникает значительная подъемная сила. В нашем случае, прикладывая к пластине внешнюю силы так, что она играет роль подъемной силы, а деформации изгиба пластины приводят ее форму к форме крыла, мы создаем для внешней текучей среды условия, при которых возникающее вихревое движение среды должно быть таким, чтобы оно соответствовало подъемной силе. В этом смысле наш способ возбуждения движения среды является обратным способу возникновения подъемной силы крыла, находящегося в движущемся потоке. В этом случае исключено применение текучей среды в качестве упора, а потому исключен элемент движения "провал" движителя в среду, когда он, как гребковое средство, используется для того, чтобы опереться о текучую среду.
Проблема неэффективной стадии "перекладывания движителя" в предлагаемом решении снимается полностью тем, что движитель в этой стадии распрямляется и возвращает потенциальную энергию изгиба в виде кинетической энергии поступательного движения плавательного аппарата вперед.
В результате наших исследований движителя с помощью метода физического моделирования получено КПД≈76%. В аналогичных условиях винт-движитель обладает КПД≈45%.
B. Применение нашего движителя в варианте лопасти для циклоидального пропеллера дает устройство, изначально обладающее высоким КПД.
Результаты, изложенные в пунктах А и Б приводят к возможности применения лопастей и принципа создания с их помощью силы тяги для циклоидального пропеллера. Для этого рассматривается вариант устройства, в составе которого шесть лопастей. Несущие оси лопастей располагаются по вершинам правильного шестиугольника, имеющего ось вращения, проходящую через геометрический центр шестиугольника. Шестиугольник назовем ротором. Оси лопастей и ось вращения ротора перпендикулярны плоскости расположения ротора.
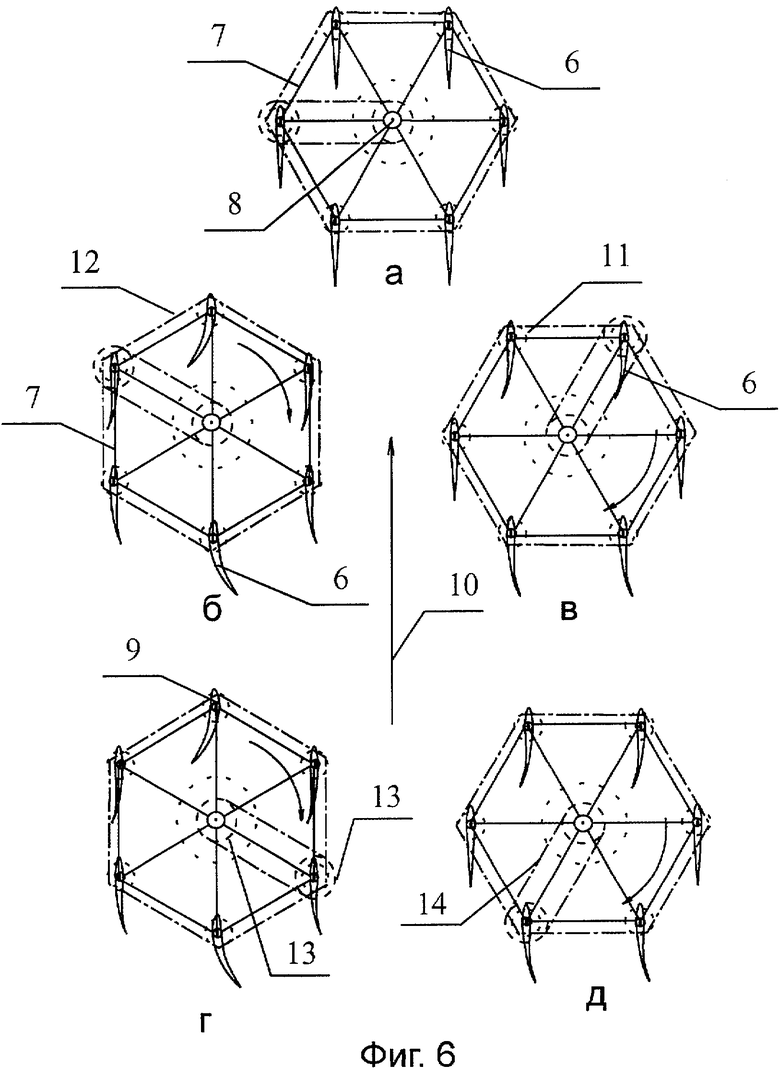
На фиг.6, а, б, в, г, д приведены схемы (вид сверху) последовательных положений лопастей (6) и ротора (7). Фиг.6, а - нейтральное или состояние покоя ротора и лопастей. На фиг.6, б, в, г, д - состояния лопастей в зависимости от положения, занимаемого ротором через 90°, в процессе его вращения вокруг оси 8 по часовой стрелке. Из фиг.6 следует, что при вращении ротора 7 каждая вершина шестиугольника проходит круговую траекторию; по этой же траектории движутся оси 9, несущие лопасти 6. При этом оси 9 свободно вращаются по отношению к ротору.
В процессе принудительного движения по окружности лопасти испытывают упругие изгибные деформации, аналогичные деформациям крыла птицы при маховых движениях, поперечных по отношению к направлению полета так, как это показано на фиг.6, б, в, г, д. Стрелка 10 указывает направление результирующей силы тяги, возникающей для заданного (фиг.6, а) направления лопастей 6.
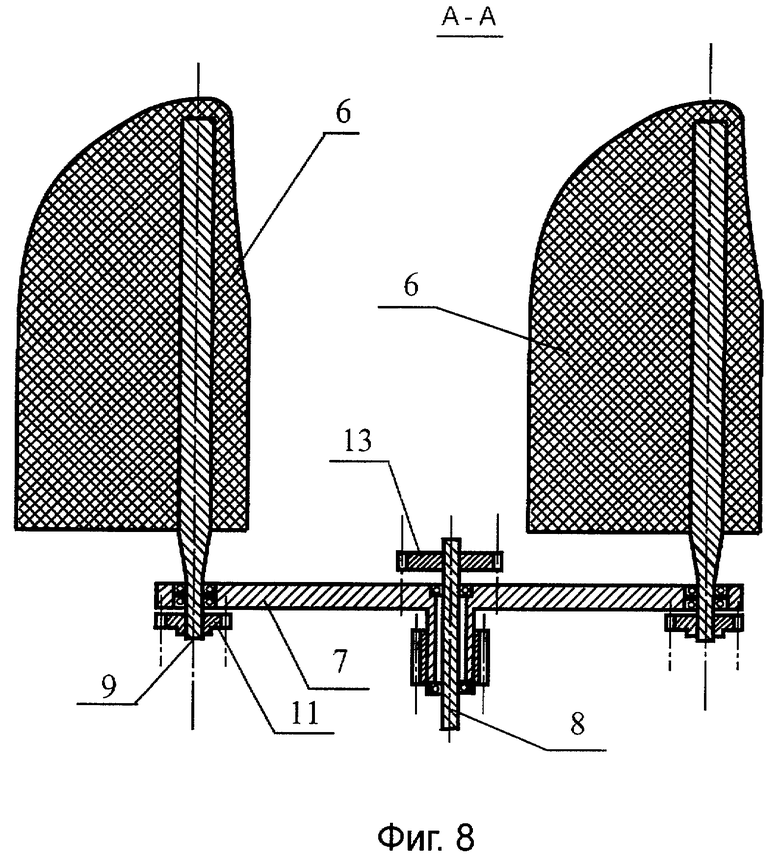
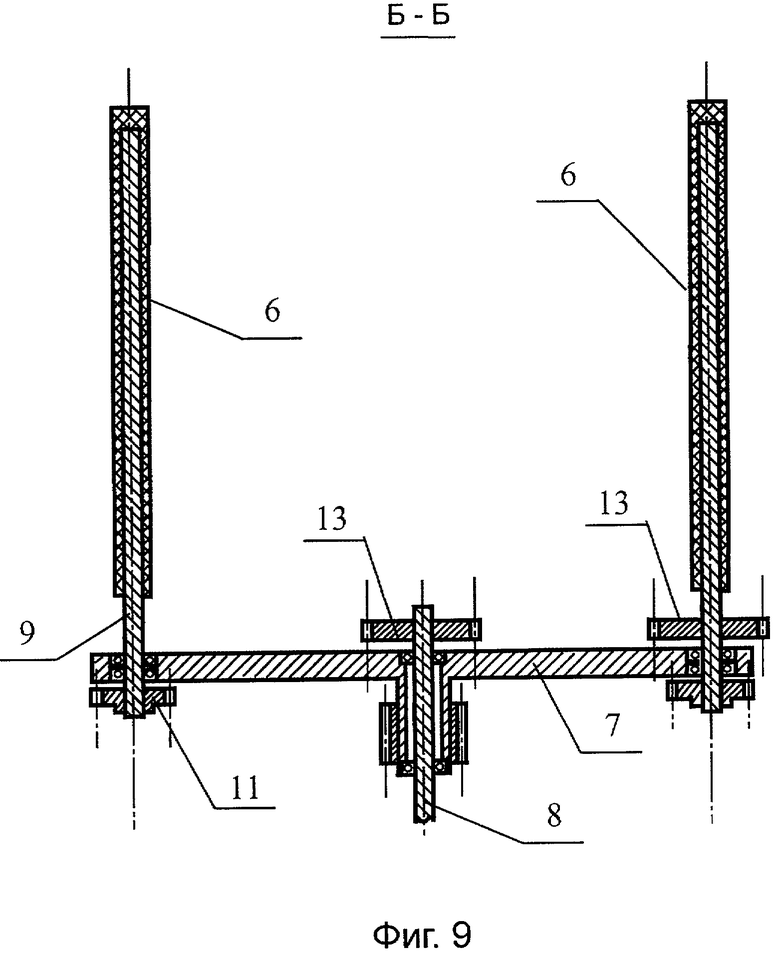
На фиг.7 приведен вид сверху с разрезами и сечениями устройства, в котором реализуется принцип действия, представленный схемами на фиг.6. На фиг.8 приведено сечение устройства плоскостью А-А, а на фиг.9 - плоскостью Б-Б. Лопасти 6 представляют собой гидродинамически обтекаемое гибкое упругое тело, закрепленное на оси 8. Ротор 7 представляет монолитное жесткое тело правильной шестиугольной формы, несущее шесть лопастей. На каждую ось 9 насажена звездочка 11; все звездочки 11 соединены цепью 12, задающей для всей группы лопастей одно и то же их положение по отношению к первоначально избранному, как, например, на фиг.6, а, направлению, сохраняющееся в процессе вращательного движения ротора. Все звездочки 11, как и лопасти 6, одинаковы. На одну из осей 9 и на ротор 7 насажены одинаковые звездочки 13, соединенные цепью 14. Передача с помощью звездочек 11, 13 и цепей 12, 14 позволяет сохранять одинаковые заданные положения лопастей 6 при любых угловых скоростях вращения ротора 7. В результате воздействие вращающегося ротора 7 на лопасти 6 сводится не только для перемещения лопастей по круговой траектории, но и к взаимодействию лопастей со средой.
Таким образом, каждая лопасть в процессе вращательного движения ротора испытывает упругие гибкие знакопеременные деформации в ходе ударного типа взаимодействия со средой в поперечном к профилю направлении. Это согласно пунктам А и Б порождает силу тяги по направлению вперед, поперечном к направлению силы взаимодействия со средой.
Изобретение поясняется иллюстрациями, на которых:
Фиг.1. Вид сбоку (сечение) АВ пластины. XOY - декартова система координат; начальная точка О совпадает с точкой отбора троса OO'; О' - точка захвата пластины тросом. С - геометрический центр пластины. S - траектория и направление движения пластины. F - вектор внешней силы, прикладываемой через трос к пластине.
Фиг.2. а - вид сбоку (сечение) пластины АВ в движении; XOY - исходная система координат; X"O"Y" - мгновенная система координат; F - вектор внешней силы, N - вектор силы реакции среды; б - вид сбоку пластины АВ в начальном положении.
Фиг.3. В системе координат XOY изображены две стадии движения гибкой пластины 1 (АВ) под действием внешней силы удара Рудар, прикладываемой к пластине через шток в точке 2: а) - сила удара направлена вверх; б - сила удара направлена вниз. Ось OY соответствует направлению движения пластины. Ось ОХ соответствует вертикальной прямой, вдоль которой шток осуществляет свое собственное возвратно-поступательное движение и движение точки захвата пластины. Векторами N показаны силы реакции среды. OO' - линия горизонта; mm' - хорда изогнутой пластины. Угол между отрезками прямых mm' и OO' соответствует углу атаки, порожденному деформацией пластины и силами удара и реакции среды. Отдельно вынесены параллелограммы сил Fудар и N, с помощью которых геометрически определяется вектор силы тяги R.
Фиг.4. Схематично показано образование цепочки вихрей, образующейся за действующей пластиной, движущейся в среде со скоростью V. Цифрами 3, 4, 5 отмечены последовательные во времени и пространстве положения пластины при прохождении срединной линии поступательного движения движителя вперед. Замкнутые и незамкнутые кривые со стрелкой указывают направления движения частиц среды. Замкнутые кривые отражают отдельные вихри положительной и отрицательной интенсивности.
Фиг.5. Приведена фотография вихревого следа за кормой действующей модели с движителем, действие которого описано в пункте Б. След отразился в виде слабо расширяющейся слева направо полосы возмущений на поверхности воды. Модель движется справа налево.
Фиг.6. Приведены схемы (вид сверху) последовательных положений лопастей (6) и ротора (7). а - нейтральное или состояние покоя ротора и лопастей, б, в, г, д - последовательные состояния лопастей в зависимости от положения, занимаемого ротором через 90°, в процессе его вращения вокруг оси 8 по часовой стрелке.
Фиг.7. Вид сверху устройства с разрезами и сечениями, в котором реализуется принцип действия, представленный схемами на фиг.6. Лопасти 6 представляют собой гидродинамически обтекаемое гибкое упругое тело, закрепленное на оси 8. Ротор 7 представляет монолитное жесткое тело правильной шестиугольной формы, несущее шесть лопастей. На каждую ось 9 насажена звездочка 11; все звездочки 11 соединены цепью 12, задающей для всей группы лопастей одно и то же их положение по отношению к первоначально избранному, как, например, на фиг.6, а, направлению, сохраняющееся в процессе движения ротора. Все звездочки 11, как и лопасти 6, одинаковы. На одну из осей 9 и на ротор 7 насажены одинаковые звездочки 13, соединенные цепью 14. Передача с помощью звездочек 11, 13 и цепей 12, 14 позволяет сохранять одинаковые заданные положения лопастей 6 при любых угловых скоростях вращения ротора 7.
Фиг.8. Сечение устройства (фиг.7) плоскостью А-А.
Фиг.9. Сечение устройства (фиг.7) плоскостью Б-Б.
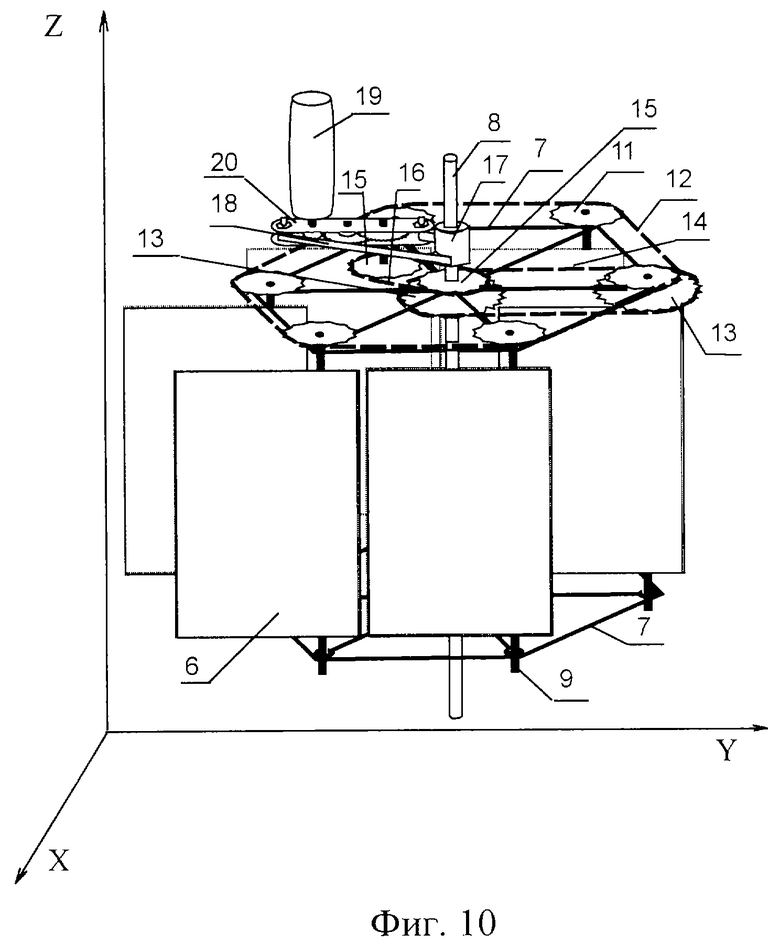
Фиг.10. Косоугольная проекция устройства, применяемого для испытаний в атмосфере. На ротор 7 жестко насажена звездочка 15, которая цепью 16 связана с точно такой же звездочкой привода. Привод креплением 17 жестко соединен с осью 8 вращения ротора 7, а крепления 18 удерживают сам привод. Привод содержит электрический двигатель 19 и шестеренчатый редуктор 20. Двигатель постоянного тока ДПМ-25-Н1-03 рассчитан на напряжение питания 12 В и силу тока 0.3 А; угловая скорость - 6000 об/мин. Редуктор понижает угловую скорость вращения вала двигателя до 300 об/мин.
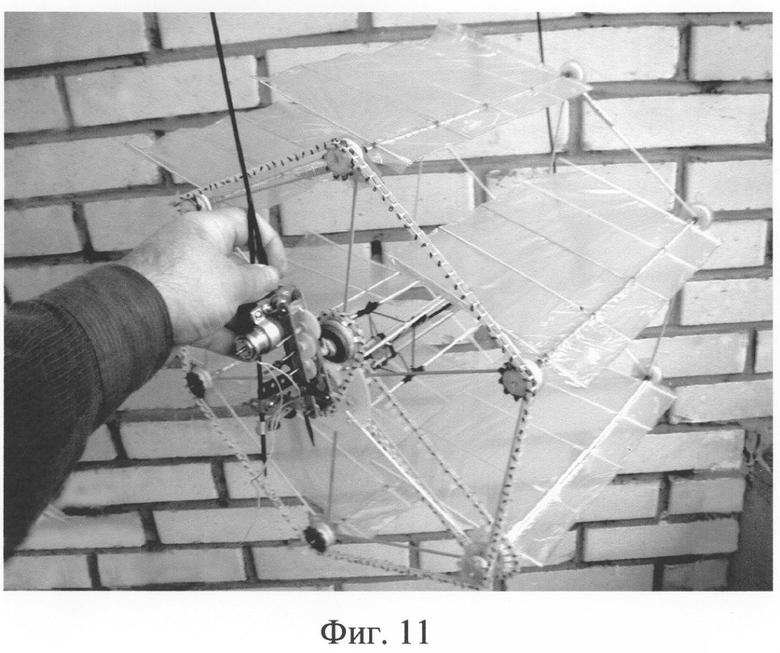
Фиг.11. Фотография устройства, изготовленного в соответствие с эскизом (фиг.10), для проведения экспериментальных исследований.
Для демонстрации реализации предлагаемого технического решения воспользуемся методом физического моделирования.
В качестве текучей среды выбираем атмосферный воздух. Конструируемым устройством будет устройство, подобное циклокоптеру, описанному выше в примере с циклокоптером.
На фиг.10 представлена косоугольная проекция устройства (фотография фиг.11), изготовленного для проведения экспериментальной работы. Лопасти 6, прямоугольной формы и размером 0,30×0,17 м2, изготавливались с помощью полимерной пленки толщиной 0,000015 м, наклеенной на каркас, изготовленный из пяти гибких бамбуковых палочек сечением 0,0007×0,0007 м2 и длиной 0,17 м. Бамбук выбран из соображений легкости, гибкости, упругости, прочности. Получившееся в результате плоское тело-лопасть жестко крепилось на оси 9 так, что воздействие вращающегося ротора на лопасть осуществлялось через ось 9. Это моделирует процесс ударного воздействия крыла на отдельное перо через ствол пера. Далее все шесть лопастей 6 посредством их осей 9 закреплялись в вершинах правильного шестиугольного ротора 7. При этом, в отличие от вышерассмотренного варианта пропеллера для водной среды, ротор 7 дополнен вторым аналогичным шестиугольным элементом для того, чтобы его конструкция имела необходимую для работы жесткость. И ротор 7 и оси 9 собраны из бамбуковых палочек диаметром 3 мм. Оси 9 свободно вращаются в местах соединения с ротором 7. Вся конструкция ротор с лопастями насажена на ось вращения 8, представляющей собой металлическую спицу. На каждую ось 9 жестко насажена звездочка 11. Все звездочки 11 одинаковы и соединены цепью 12, что жестко связывает их так, что поворот на произвольный угол любой из звездочек относительно ротора означает поворот на тот же угол каждой из звездочек 11. На ось 8 вращения ротора и на одну из осей 9 жестко насажены одинаковые звездочки 13, соединенные цепью 14. При повороте ротора на покоящейся оси 8 на произвольный угол из-за связи 9, 11, 13, 14 оси 9 смещаются по окружности с центром, совпадающим с осью 8, но при этом собственного вращения в своей системе покоя оси 9 не претерпевают. С другой стороны, поворот оси вращения 8 на некоторый угол приводит к повороту каждой из осей 9 на тот же угол - это изменяет направление действия результирующей силы тяги, что позволяет управлять судном или аппаратом, несущим предлагаемое устройство. На ротор 7 жестко насажена звездочка 15, которая цепью 16 связана с точно такой же звездочкой привода. Привод креплением 17 жестко соединен с осью 8 вращения ротора 7, а крепления 18 удерживают сам привод.
Таким образом, привод, жестко связанный с осью вращения 8, через ведущую звездочку 15 задает с помощью цепи 16 момент вращения ведомой звездочке 15, жестко связанной с ротором, что приводит ротор во вращательное движение. Вращающийся ротор 7 перемещает по окружности оси вращения 9 лопастей 6. Но, перемещаясь таким образом, оси 9 не вращаются, т.е. ротор 7 осуществляет параллельный перенос осей 9. В результате каждая лопасть 6 воспроизводит маховые движения, порождающие силу тяги вперед, в направлении, поперечном направлению воздействия ротора на лопасть.
Привод содержит электрический двигатель 19 и шестеренчатый редуктор 20. Двигатель постоянного тока ДПМ-25-Н1-03 рассчитан на напряжение питания 12 В и силу тока 0.3 А; угловая скорость - 6000 об/мин. Редуктор понижает угловую скорость вращения вала двигателя до 300 об/мин. Реостат, включенный в сеть источник питания - двигатель позволяет регулировать угловую скорость ротора пропеллера в интервале 60-300 об/мин.
Результаты испытаний предлагаемого технического решения сравнивались с результатами испытаний циклокоптера, выполненными в работе Chul Yong Yun, Illkyung Park, Но Yong Lee, Jai Sang Jung, In Seong Hwang, Seung Jo Kim and Sung Nam Jung, "A New VTOL UAV Cyclocopter with Cycloidal Blades System", AHS 60th Annual Forum and Technology Display, June 7-10, 2004, Baltimore, MD; http://ksea.org/ukc2004/en /Proceedings/01 AST/AST25_SewigJoKim.pdi.
Измерения дали следующие результаты (таблица 1).
м2
Мощность (3,6 Вт), равная произведению силы тока на напряжение, для нашего технического решения является максимальной; действующие значения были меньше.
Основным параметром, использованным для сравнения двух технических решений, были значения отношения возникающей силы тяги к мощности двигателя, нормированные на 1 м2 полной площади лопастей, в процессе движения порождающих силу тяги. Значения этого параметра 0, 475 для предлагаемого устройства и 0,045 для циклокоптера указывают на то, что предлагаемое устройство более чем на порядок экономичнее известного устройства.
Другой параметр - отношение мощности двигателя к массе устройства - указывает на существенные конструкционные резервы для промышленных вариантов предлагаемого устройства: 8 - для нашей модели устройства и 180,1 - для циклокоптера. В результате преимущество предлагаемого технического решения над известными становится бесспорным.
Таким образом, предложенное техническое решение оказывается экономически существенно более выгодным, чем известные решения. Причина выигрыша заключается в том, что мы принципиально отходим от варианта использования текучей среды в качестве опоры для движителя, поскольку в этом случае движитель всегда будет «проваливаться» в среду. При этом его действенность будет заключаться в том, сколько текучей массы в единицу времени он успеет оттолкнуть от себя. Но это уже ближе к реактивному движению, причем в самом экономически невыгодном варианте. Наш же вариант заключается в том, что движитель создает условия для возникновения вихревых потоков таких, которые возникают при маховых движениях крыла у птицы или хвоста у рыбы, КПД которых примерно 95%.
Предлагаемое техническое устройство придает несущему его судну или аппарату такую же высокую маневренность, как пропеллер Воис-Шнайдера, но оно более технологичное в изготовлении, более простое в управлении и более простое конструктивно, т.е. более надежное в эксплуатации. К тому же пропеллер Воис-Шнайдера позволяет решить задачу маневренности судна только в процессе его работы, а в состоянии покоя, например, при буксировке судна, пропеллер становится лишним элементом корпуса судна, мешающим его буксировке. В этих условиях предлагаемое устройство легко переводится в режим руля, позволяющего легко корректировать движение буксируемого судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ВОЛНОВАЯ ТУРБИНА "УСТЮГ" | 2005 |
|
RU2303708C2 |
| СПОСОБ СОЗДАНИЯ СИЛЫ ТЯГИ В ПОДВИЖНЫХ СРЕДАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2285633C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЗАТОПЛЕННОГО ТЕЛА | 2003 |
|
RU2259302C2 |
| СООРУЖЕНИЕ ДЛЯ АКТИВНОГО ВОЗДЕЙСТВИЯ НА ВИХРЕВЫЕ АТМОСФЕРНЫЕ ОБРАЗОВАНИЯ | 2005 |
|
RU2295853C1 |
| СПОСОБ ВОЗВРАТНО-ВИХРЕВОГО ТУРБУЛЕНТНОГО ПОДАВЛЕНИЯ КРУПНОМАСШТАБНОГО СИНОПТИЧЕСКОГО ВИХРЕОБРАЗОВАНИЯ | 2003 |
|
RU2251835C2 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| Циклический движитель летательного аппарата вертикального взлета и посадки | 2022 |
|
RU2778181C1 |
| УСТРОЙСТВО И СПОСОБ ПОЛЕТА В ВОЗДУХЕ С ВОЗМОЖНОСТЬЮ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2013 |
|
RU2566177C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЦЕНТРОБЕЖНОЙ СИЛЫ В СИЛУ ТЯГИ | 2009 |
|
RU2454353C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЦЕНТРОБЕЖНОЙ СИЛЫ В СИЛУ ТЯГИ | 2008 |
|
RU2381952C2 |
Изобретение относится к воздушному и водному транспорту, касаясь создания пропеллеров для движения транспортных средств в сплошных текучих средах. Пропеллер имеет ротор с механическим приводом и n одинаковых лопастей, закрепленных несущими их осями на несущей конструкции ротора перпендикулярно к плоскости вращения, симметрично и на одинаковом расстоянии от общей оси их вращения так, что места крепления представляют собой вершины правильного n-угольника. В качестве отдельной лопасти устройства применено плоское или объемное гидро- или аэродинамически обтекаемое гибкое упругое в поперечном направлении тело, жестко закрепленное на собственной оси вращения. На сами оси, закрепленные с возможностью свободного вращения, насажены одинаковые звездочки, связанные цепной передачей в одну систему, в которой тела лопастей в нерабочем состоянии устройства всегда расположены в параллельных плоскостях независимо от угла поворота ротора. Ротор выполнен барабанного типа для двухстороннего захвата осей вращения лопастей или плоскостным - для одностороннего захвата осей вращения лопастей и насажен с возможностью свободного вращения на собственную ось, на которую насажена ведущая звездочка, связанная цепной передачей с аналогичной ведомой звездочкой, насаженной на одну из n осей вращения лопастей. При роторе барабанного типа лопасти могут иметь имеют форму прямоугольника. Изобретение позволяет эффективно преобразовывать энергию вращательного движения пропеллера в энергию поступательного движения летательного аппарата или судна. 1 з.п. ф-лы, 11 ил., 1 табл.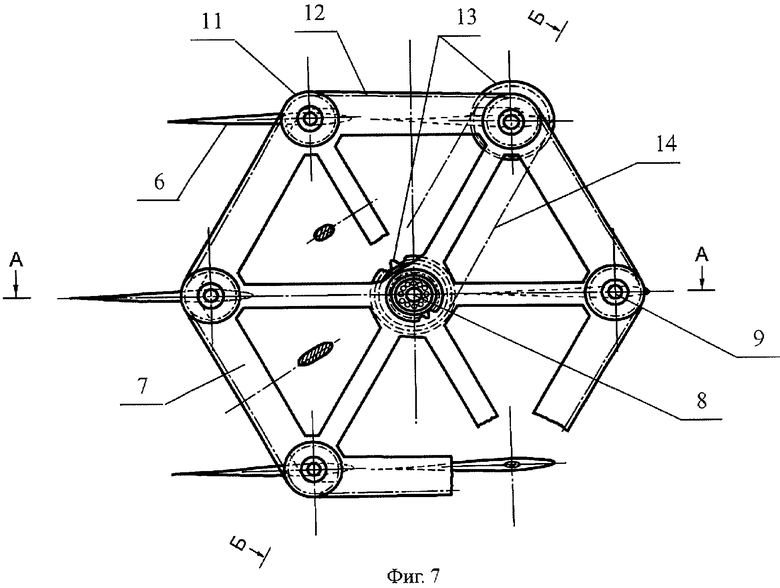
| ДВИЖИТЕЛЬ | 2004 |
|
RU2263605C1 |
| КРЫЛЬЧАТЫЙ ДВИЖИТЕЛЬ | 0 |
|
SU232783A1 |

