Изобретение относится к авиации и может применяться в летательных аппаратах (ЛА) вертикального взлета и посадки, в частности, в летающих мотоциклах, автомобилях, грузовых дронах, в пилотируемом и беспилотном транспорте.
Городской ландшафт предъявляет особые требования к безопасности сближения и причаливания ЛА к зданиям и иным вертикальным объектам, что не удовлетворяется в случае вертолетов и мультикоптеров с горизонтально-расположенными роторами.
Также у современных ЛА отсутствует эффективная амортизация при столкновениях и падениях.
Из уровня техники известно крыло в виде гребного колеса (см. патент US 5265827 на изобретение, опубл.30.11.1993).
Крылья-лопасти этого колеса меняют угол атаки с положительного на отрицательный на каждом обороте, создавая подъемную силу, и их управляемый эксцентриситет создает любую комбинацию горизонтальной и вертикальной сил.
В лаборатории имени Лэнгли в 1933 году Джон Б. Уитли теоретически проверил аэродинамические принципы и провел численные расчеты ротор с четырьмя лопастями, радиусом 1.8 метра, размахом лопастей 7.3 м, хордой 144 мм и окружная скорость 91 м/с и цикложира с двумя подобными роторами (взлетная масса 1362 кг при двигателе 300 л.с).
В ходе анализа схема была признана работоспособной, при этом висящий полет, вертикальный подъем и горизонтальный полет с разумной скоростью осуществимы при не чрезмерно высокой мощности двигателя.
Однако, было установлено, что цикложир способен к авторотации при планирующем полете.
В 1935 Джон Б. Уитли и Рэй Уиндлер продули ротор цикложира - 4 лопасти, размах и диаметр - по 2.4 м, хорда - 95 мм, в 6-метровой аэродинамической трубе NACA.
Известно, что цикложир способен к вертикальному взлету, горизонтальному полету и безмоторному планированию.
Весовая отдача цикложира представляется весьма низкой, а максимальная скорость 100 миль/час - достижимой лишь при удельной нагрузке на мощность не более 3.2 кг/л.с.
Зависимость потребной мощности от коэффициентов сопротивления и подъемной силы из теории 1933 года подтвердилась.
Аэродинамическое качество быстро возрастает при повышении отношения «скорость лопасти/скорость полета».
В 1933 году профессор Адольф Рорбах спроектировал цикложир с трехлопастными роторами длиной 4,4 м. Аппарат с максимальным взлетным весом 950 кг. Вертикальный взлет, высокая маневренность.
Расчетные характеристики известного технического решения:
Общие размеры: длина - 8.6 м, высота - 4.3 м, размах - 10 м.
Роторы: диаметр - 3.6 м, три лопасти, длина лопасти - 4.4 м, хорда - 0.315 м, максимальная скорость вращения - 420 об/мин.
Мощность двигателя - 240 л.с, возможно, от двух моторов.
Вес пустого - 680 кг, полезная нагрузка - 270 кг, взлетный вес - 950 кг.
Скорости: максимальная - 200 км/ч, крейсерская (при оборотах 75%) - 170 км/ч, минимальная - 0 км/ч, максимальная при полете назад - 30 км/ч.
Потолок - 4500 м при горизонтальном полете и 500 м при вертикальном наборе высоты. Дальность полета - 400 км с тремя пассажирами и 700 км без пассажиров.
С перегрузом 250 кг (то есть со взлетным весом 1200 кг) минимальная скорость - 21 км/ч, максимальная - 190 км/ч, потолок - 2700 м.
Дальность полета - 1050 км с двумя пассажирами и 1550 км без пассажиров.
Далее NASA провело дополнительные расчеты с помощью современных компьютеров и серьезно рассматривает роект разработки ротоплана, но не хватило средств.
В 1976-1980-х годах Марсель Шабоне запатентовал тягово-несущие роторы (патент Франции №76.39820, 1976; патент США №4210299, 1977-1980). При движении лопасти вниз создается подъемная сила, при движении вверх - толкающая, угол атаки управляется «программно», при помощи профилированных кулачков. Разные наборы кулачков для разных режимов полета (взлет, набор высоты, крейсерский режим, снижение, посадка)
Американец Хайнц Герхардт в 1992-1993 годах запатентовал (патент США №5265827) новый летательный аппарат с гребными колесами, являющийся по аэродинамической схеме обычным цикложиром. Продольная балансировка обеспечивается либо вертикальным пропеллером на киле, либо второй парой цикложирных роторов.
Особенность аппарата - отсутствие кинематики управления циклическим установочным углом лопастей. Вместо этого на каждой лопасти установлен гидроцилиндр, постоянно управляемый компьютером по выбранному закону.
В настоящее время, Сеульский государственный университет (Южная Корея), Национальный университет Сингапура, группа Bosch Aerospace и еще несколько организаций взялись за реализацию идеи. Первая модель оторвалась от земли в 2007 году.
Основными особенностями летательных аппаратов вертикального взлета и посадки с циклическими движителями по сравнению с вертолетной техникой являются возможность работы в ограниченных условиях за счет защищенности движителей от соударений с препятствиями, способность причаливания к вертикальным поверхностям, взлет и посадка с наклонных поверхностей и более высокая маневренность. Как показало математическое моделирование, циклолет по ряду ключевых параметров превосходит и схожие с ним по компоновке мультикоптеры. В частности, при одинаковых габаритах и взлетной массе, циклолету требуется гораздо меньшая мощность двигателя при почти вдвое большей массе полезной нагрузки.
Достоинство цикложира - возможность практически безынерционного управления вектором тяги в диапазоне 360°.
Из уровня техники, отдельным и не связанным с циклокоптером/циклолетом изобретением, является колесо с изменяемым по вертикали положением втулки для амортизации.
В отличие от известных технических решений в заявленной системе объединены 2 отдельных изобретения: циклокоптер Герхардта (см. патент US 5265827, опубл.30.11.1993) и амортизирующее колесо Soft Wheel, они совмещаются в единый узел ЛА: шасси + ротор, так появляется новый движитель для городского аэро-транспорта: амортизирующее колесо - циклокоптер.
Модификация циклокоптера Герхардта заключается в том, что изменение угла атаки каждой лопатки производится программно таким образом, что результирующий вектор тяги может быть направлен в любую сторону в плоскости вращения ротора. В частном случае, при движении аппарата над землей на фиксированной высоте, при движении лопатки вниз создается подъемная сила, при движении вверх - толкающая, при движении по вектору движения и против него - подъемная сила (в данном случае, подъемная сила удерживает аппарат без снижения, а толкающая - обеспечивает прямолинейное движение).
Поворот летательных аппаратов с N движителями в виде циклокоптера по Yaw (Рыскание, или поворот вокруг вертикальной оси), может осуществляться как изменением угла самой рамы (поворот М, где M<N и М от 2х до 20 передних движителей аналогично квадроциклу), так и изменением горизонтальной тяги соответствующих повороту роторов (на стороне, в которую производится разворот, толкающая сила усиливается, на противоположной - ослабляется).
Техническими результатами заявленного изобретения являются:
- использование амортизирующей конструкции вертикальных роторов и амортизаторов в крыльчатом колесе, что увеличивает и сохраняет жизнь и здоровье пилота и пассажиров ЛА при экстренной посадке;
- переход энергии в движение на шасси, а также импульса вращающихся лопастей для гашения энергии удара о землю/препятствие;
- возможность безопасной эвакуации/подбора людей;
- увеличение продолжительности и дальности полета ЛА за счет снижения массогабаритных показателей и улучшения аэродинамики;
- отсутствие необходимости в переходном режиме между движением по земле и по воздуху;
- возможность вертикального взлета и посадки с разбегом в любую сторону;
- возможность безопасно взлетать и садиться на наклонные поверхности;
- возможность применения одних двигателей для продолжения эффективного движения по земле после полета и наоборот;
- уменьшение веса за счет отсутствия отдельных шасси, поскольку за счет того, что функции шасси выполняет каждый ротор вида циклокоптера;
- возможность практически безынерционного управления вектором тяги в диапазоне 360°;
- возможность безопасного сближения и "причаливания" к вертикальным объектам типа зданий (безопасной эвакуации/подбора людей из балконов/лоджий/окон)
- увеличение продолжительности и дальности полета мультикоптера за счет снижения массогабаритных показателей и улучшения аэродинамики;
- отсутствие необходимости в переходном режиме между движением по земле и по воздуху;
- уменьшение веса за счет отсутствия отдельных шасси (функции шасси выполняет каждый ротор вида циклокоптера);
- безопасность столкновений на небольших скоростях с аналогичными ЛА и вертикальными препятствиями в воздухе за счет защищенности винто-моторной группы.
Технические результаты достигаются тем, что система объединения ротора и амортизирующего шасси ЛА в единый аэроназемный движитель включает:
- колесо-циклокоптер с креплением лопаток;
- бортовой летный компьютер с процессором с возможностью взаимодействия с мотором ротора и с серва-приводами для изменения углов атак и профилей лопаток, а также активной амортизации;
- независимую подвеску рамы шасси - внешнюю решетчатую шину с внутренним покрытием из фторопласта, обеспечивающую сцепление при езде по земле и доступ к воздушной массе сквозь решетку - при полете;
- датчики для снятия всей информации и данных;
- электродвигатели несущих винтов;
- электронные регуляторы хода (ESC);
- пропорционально-интегрально-дифференцирующие регуляторы (ПИД-регуляторы);
- контроллеры АКБ.
При этом, применяется N роторов циклокоптера (от 2 до 200), которые выполняют функцию амортизирующих шасси с независимо от вращения лопастей - вращающейся поверхностью соприкосновения с землей.
При этом внешняя решетчатая шина вращается независимо за счет внутреннего покрытия фторопластом.
«Амортизирующее колесо - циклокоптер» может применяться как в летающих мотоциклах, так и в автомобилях, грузовых дронах, в пилотируемом и беспилотном транспорте.
Признаки и сущность заявленного изобретения поясняются в последующем детальном описании, иллюстрируемом чертежами, где показано следующее.
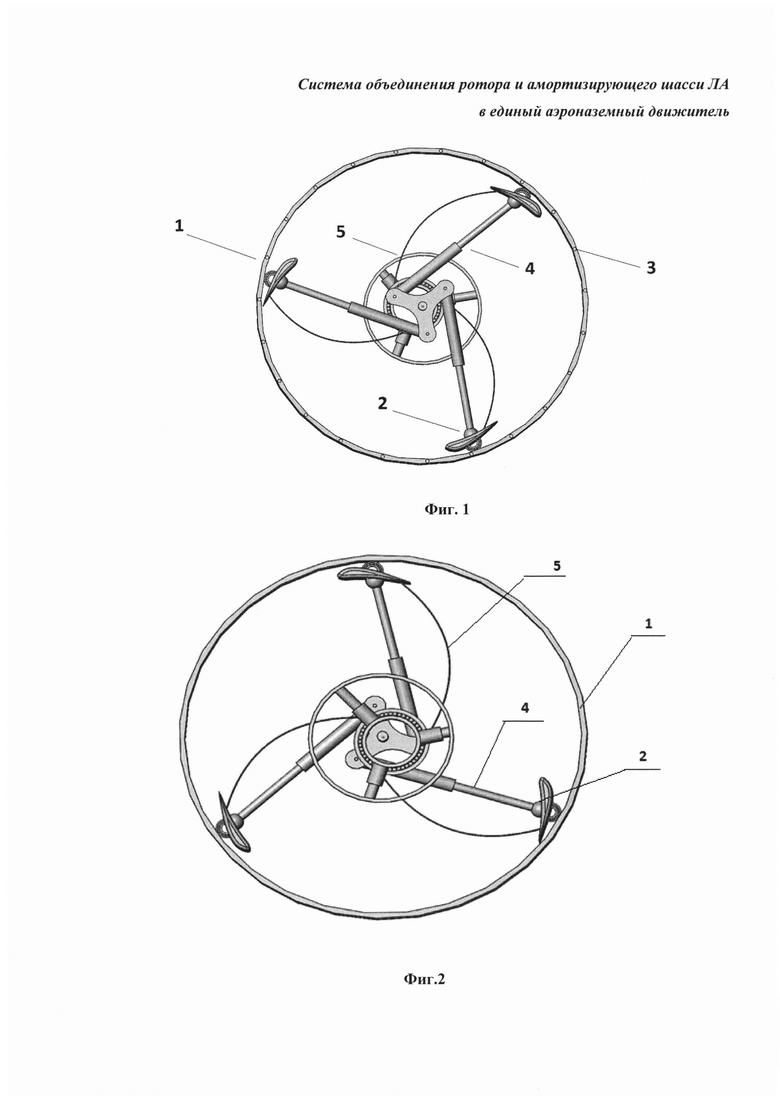
На фигуре 1 представлено шасси-ротор в профиль (вид с внешней стороны от корпуса аппарата). Вращение лопаток по часовой стрелке.
На фигуре 1 обозначено следующее:
1 - колесо, выполненное из ротора циклокоптера;
2 - изменяемый угол атаки каждой лопатки за счет автомата перекоса;
3 - решетчатая рама, играющая роль шины на независимой подвеске в колесе (внутреннее фторопластовое покрытие);
4 - амортизаторы внутри колеса;
5 - автомат перекоса из материалов с памятью формы.
На фигуре 2 показан внешний вид шасси-ротора в профиль (вид со стороны корпуса аппарата). Вращение против часовой стрелки.
Автомат перекоса в работе: сдвиг внутреннего кольца обеспечивает установку циклического шага (смена углов атаки лопаток).
Как и у большинства современных мультикоптеров используется бортовой компьютер и лидар (либо радар) для измерения расстояний и высоты.
Ротор-колесо выполнен по схеме циклокоптера. Лопатки имеют изменяемый угол атаки (серва-приводы, либо автомат перекоса) и изменяемый профиль (мембрана с реакцией на автомат перекоса, либо система трубок с электро-клапанами), устанавливаемые, в зависимости от необходимого вектора тяги, командами бортового компьютера.
В роторе-колесе установлены амортизирующие спицы, гасящие энергию ударов как перегибом, так и пневмо-амортизатором.
Бортовой летный компьютер выполнен с возможностью:
- управления электродвигателями несущих винтов и установки углов/профилей лопаткам путем прямого сообщения компьютера с серва-приводами и электро-клапанами лопаток для изменения вектора тяги каждого колеса-циклокоптера;
- по поступившему сигналу падения/столкновения, при возникновении аварийной-нештатной ситуации или показаниям от контроллеров и/или высокочувствительных датчиков (радар/лидар), включить систему "активной амортизации", при которой амортизаторы циклически увеличивают плечо в направлении встречи с препятствием.
Электронный регулятор хода (ESC) - для управления оборотами электродвигателя позволяет плавно варьировать электрическую мощность, подаваемую на электродвигатель.
Бортовой летный компьютер для изменения вектора тяги напрямую задает необходимый угол атаки и профиль лопаток каждому из N-роторов циклокоптеров.
После того, как угол задан (соответственно, вектор установлен), бортовой компьютер отправляет данные о необходимой тяге и необходимой электроэнергии контроллеру, который обрабатывает этот запрос, и в соответствии с этим запросом устанавливает режим работы электромотора циклокоптера (скорость вращения лопаток).
При этом, сначала устанавливается необходимый для установки вектора тяги циклический поворот угла атаки и профиль каждой лопатки каждого из N колес-циклокоптеров. После этого отправляются данные на электронные регуляторы хода (ESC). Сразу после этого отправляются данные на пропорционально-интегрально-дифференцирующий регулятор (РШ-регулятор). В результате меняется ток двигателя и скорость вращения лопаток, электронный регулятор хода (ESC) это определяет и отправляет данные о токе, оборотах, а также других параметрах винтомоторной группы на контроллер, который проверяет соответствие с запрашиваемыми параметрами, если результат достигнут, ничего не делаем, если не достигли повторяем процедуру.
Одним из основных преимуществ изобретения является то. что основным параметром является тяга винтомоторной группы, которая устанавливается сразу же после поворота и установки профиля лопаток, что показывает отличные динамические характеристики.
Проведенный анализ уровня техники позволил установить: аналоги с совокупностью существенных признаков, тождественных и идентичных существенным признакам заявленной системы объединения ротора и амортизирующего шасси ЛА в единый аэро-наземный движитель для увеличения активной и пассивной защиты от крушений при падении и столкновений в воздухе и для передвижения по земле и воздуху, отсутствуют, что указывает на соответствие заявленной системы условию патентоспособности «новизна».
Результаты поиска известных решений с целью выявления существенных признаков, совпадающих с отличительными от аналогов существенными признаками заявленной системы, показали, что они не следуют явным образом из уровня техники, а также не установлена известность влияния отличительных существенных признаков на указанный авторами технический результат.
Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Несмотря на то, что заявленное изобретение показано и описано со ссылкой на его определенные предпочтительные варианты осуществления, специалистам в данной области техники будет понятно, что различные изменения по форме и содержанию могут быть сделаны в нем без отклонения от сущности и объема изобретения, которые определены прилагаемой формулой изобретения с учетом описания и чертежей.
Единый аэроназемный движитель содержит колесо, выполненное из ротора циклокоптера, независимую подвеску рамы шасси - внешнюю решетчатую шину, обеспечивающую сцепление при езде по земле и доступ к воздушной массе сквозь решетку при полете, амортизаторы внутри колеса, автомат перекоса из материалов с памятью формы, датчики для измерения расстояний и высоты лидар/радар, электродвигатели несущих винтов, электронные регуляторы хода (ESC), выполненные с возможностью управления оборотами электродвигателя и плавного варьирования электрической мощностью, подаваемой на электродвигатель, пропорционально-интегрально-дифференцирующие регуляторы (ПИД-регуляторы), контроллеры АКБ, бортовой летный компьютер. Обеспечивается увеличение безопасности полета, взлета и посадки, в том числе с использованием наклонных поверхностей и с возможностью причаливания к вертикальным поверхностям, увеличение продолжительности и дальности полета, возможность управления вектором тяги в диапазоне 360°, уменьшение веса, увеличение безопасности столкновений на небольших скоростях. 2 ил.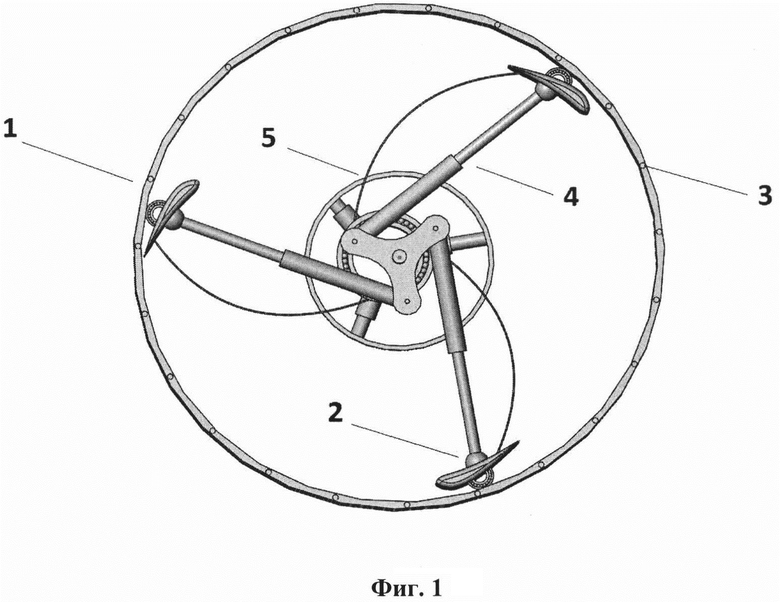
Единый аэроназемный движитель, содержащий:
- колесо, выполненное из ротора циклокоптера;
- независимую подвеску рамы шасси - внешнюю решетчатую шину, обеспечивающую сцепление при езде по земле и доступ к воздушной массе сквозь решетку при полете;
- амортизаторы внутри колеса;
- автомат перекоса из материалов с памятью формы;
- датчики для измерения расстояний и высоты лидар/радар;
- электродвигатели несущих винтов;
- электронные регуляторы хода (ESC), выполненные с возможностью управления оборотами электродвигателя и плавного варьирования электрической мощностью, подаваемой на электродвигатель;
- пропорционально-интегрально-дифференцирующие регуляторы (ПИД-регуляторы);
- контроллеры АКБ;
- бортовой летный компьютер, выполненный с возможностью:
- управления электродвигателями несущих винтов и установки углов/профилей лопаток путем прямого сообщения компьютера с сервоприводами и электроклапанами лопаток для изменения вектора тяги каждого колеса;
- включения системы "активной амортизации" по поступившему сигналу падения/столкновения при возникновении аварийной нештатной ситуации или показаниям от контроллеров и/или высокочувствительных датчиков радар/лидар, при которой амортизаторы циклически увеличивают плечо в направлении встречи с препятствием;
- взаимодействия с мотором ротора и с сервоприводами, а также изменения углов атак и профилей лопаток и активной амортизации.
| СЧЕТЧИК К ТКАЦКОМУ СТАНКУ | 1932 |
|
SU29796A1 |
| CN 0208036590 U, 02.11.2018 | |||
| WO 2009109918 A4, 11.09.2009 | |||
| JP 2011207299 A, 20.10.2011 | |||
| CN 0207510714 U, 19.06.2018. | |||

