Уровень техники
Изобретение относится к средствам создания силы тяги для воздушного, надводного и подводного транспорта. Основой изобретения является применение варианта колебательного движения, осуществляемого поперечным возвратно-поступательными колебаниями движителя, имитирующими "рыбий хвост" или "крыло птицы".
Известен (АЭРОДИНАМИКА. А.М.Мхитарян. Машиностроение. М., 1976. 448 с.) принцип гребного винта для создания силы тяги. Гребной винт во время работы непрерывно преобразует вращение вала двигателя в упор - силу, толкающую судно вперед. При вращении винта на поверхностях его лопастей, обращенных вперед - в сторону движения судна (засасывающих), создается разрежение, а на обращенных назад (нагнетающих) - повышенное давление воды. В результате разности давлений на лопастях возникает сила тяги - гребной принцип создания силы тяги.
Главным недостатком гребного винта является принцип гребного создания силы тяги за счет использования жидкой среды в качестве упора. Это порождает значительные потери энергии на энергетически высокозатратную неэффективную турбулизацию среды, порождаемую индуктивными, профильными и поверхностными силами сопротивления среды, а также на закручивание лопастями потока жидкости, вовлекаемой в процесс работы винта. Увеличение скорости вращения винта, приводящее к увеличению количества жидкости, использованной в качестве упора, дополнительно приводит к отрицательному разрушительному воздействию среды на винт за счет явления кавитации.
Известно устройство (Патент №2081770 от 29.07.1992 г.), которое состоит в следующем. С кормовой частью корпусов судна-катамарана шарнирно соединены плавниковые движители, работающие в противофазе. Движитель-плавник имеет коническую или клинообразную в плане форму. Его острый кормовой конец подобно хвостовому плавнику рыбы плавно переходит в гибкую и упругую армированную пластину, причем в любом положении движитель в целом образует с корпусом судна единую обтекаемую систему.
Недостатком известного устройства являются:
- низкая эффективность, обусловленная наличием клинообразной формы движителя, приводящей к низкоэффективной работе давящей и подсасывающей сторон клина;
- сохранение гребково-взмахового принципа работы пластины, в которую переходит клин в своей острой конечной кормовой части.
Известен "Способ движения транспортного средства и устройство "Рыбий хвост" для его осуществления. Патент №2109655". Способ заключается в использовании рабочего органа в виде гибкой оболочки с полостью, заполненной жидкостью, один конец которого свободен, а другой шарнирно закреплен, заключающийся в возвратно-поступательном перемещении закрепленного конца перпендикулярно направлению движения транспортного средства с последующим заполнением под давлением оболочки.
Недостатками известных способа и устройств являются:
- гребково-взмаховый принцип работы;
- затраты энергии, времени и средств на создание начального рабочего положения движителя - "замах" для следующего гребка;
- неизбежное создание условий для возникновения силы, противодействующей движению, при выполнении подготовительных этапов возвратно-поступательного движения рабочего органа;
- типично гребковый движитель, принципиально не соответствующий механизму колебательного движения рыбьего хвоста.
Наиболее близкими по технической сущности решениями являются (Патент №2172700) "Способ создания движущей силы аппарата в текучей среде и движитель для его осуществления". Способ создания движущей силы аппарата, снабженного, по меньшей мере, одним крылом, в текучей среде заключается в том, что крылу одновременно придают возвратно-поступательное перемещение в направлении под углом примерно от 50 до 130° к набегающему потоку текучей среды и угловое перемещение. Скорость перемещения составляет примерно от 0,1 до 12 скорости движения самого аппарата, сообщаемого ему этим крылом, при этом угол атаки сохраняется постоянным. Движитель для осуществления этого способа содержит, по меньшей мере, одно крыло, снабженное шарнирно связанным с ним приводом, жестко закрепленным на аппарате и сообщающим крылу возвратно-поступательное движение относительно направления движения потока текучей среды. Крыло аппарата снабжено устройством управления его углом атаки, связанным с этим крылом. Достигается повышение пропульсивного коэффициента движителя.
Недостатками известных способа и устройств являются:
- сохранение элемента гребкового способа создания силы тяги путем применения угловых перемещений крыла, что сопровождается неэффективной подготовительной стадией движения - замахом;
- усложнение процесса создания движущей силы аппарата введением дополнительного оборудования, осуществляющего функции управления углом атаки крыла-движителя;
- внешнее управление углом атаки крыла-движителя, приводящее к потерям эффективности движителя за счет временных и энергетических затрат на это управление, а также за счет определяющего ситуацию присутствия человеческого фактора, приводящего к энергетически неоптимальному поведению движителя в среде;
- потери в коэффициенте полезного действия, вызванные главной функцией движителя опереться на жидкую среду и оттолкнуться от нее.
Для всех устройств характерна низкая или вообще отсутствует способность к реверсу транспортного средства, несущего движитель.
Целью изобретения является создание способа и соответствующего устройства, лишенных вышеперечисленных недостатков.
Эта цель достигается не попыткой опереться на жидкую среду, а путем возбуждения движителем вихревого движения среды, приводящего к поступательному движению судна, несущего движитель, и противоположному этому движению вихревому потоку среды.
Поясним это.
Известно (Гидроаэродинамика. Л. Прандтль R@C Dynamics. Москва-Ижевск: НИЦ "Регулярная и хаотическая динамика", 2002, 572 стр.), что коэффициент полезного действия η (кпд) идеального винта определяется отношением η=V/(V+W/2)*100%. Где V - скорость первичного потока, в котором работает винт, W - приращение скорости потока, создаваемое работающим винтом, а следовательно, V+W - результирующая скорость движения вторичного потока. При этом рассуждение о том, что уменьшение скорости W способствует повышению КПД, кажется очевидным. Этого можно добиться увеличением радиуса ометаемой винтом поверхности, что приводит к техническим сложностям типа той, что возникает при увеличении размеров лопастей винта - ограничение размеров винта пределом прочности материалов как самого винта, так и всех узлов и деталей тягового устройства. Явная неэффективность такого решения задачи повышения КПД приводит к фактически реактивному способу движения, при котором винт работает в водометном варианте. В этом случае работу винта сопровождает явление кавитации, с которым начинают бороться с помощью суперкавитационных винтов. В результате ведется борьба с теми осложнениями, которые порождает изначально неправильное понимание процесса возникновения упора о подвижную среду у тела, движущегося в этой среде.
Основные принципы других способов и устройств - это прямое копирование колебательного движения хвоста, служащего естественным продолжением конечной задней части туловища рыбы, и использование жидкой среды в качестве упора.
Однако колебательные движения устройств, соединенных шарнирно с корпусом судна на корме, неизбежно имеют две стадии движения - замах и гребок. Гребок, выполняемый в виде поворота рабочей части движителя около оси вращения шарнира (перпендикулярной продольной оси направления движения судна), в самом начале максимально интенсивно для выбранного способа содействует развитию движения за счет того, что возникающая сила тяги, определяемая силой реакции среды, направлена достаточно остро по направлению движения. Но по мере исполнения гребка вектор силы реакции среды поворачивается, приближаясь к нормали к направлению движения. В этом случае эффективность устройства снижается до нуля. Дальнейшее движение устройства - это подготовка к очередному гребку - замах. В этом случае вектор силы тяги вообще меняет направление настолько, что противодействует движению судна. Клинообразный движитель в силу выбранной формы якобы исключает чистый подготовительный элемент "замах", но при этом сохраняется гребковое взаимодействие со средой, поэтому приходится добавлять гибкую пластину на конце плавника-движителя, поскольку сам клин-движитель малоэффективен.
Во всех случаях различных способов и устройств сохранение такого действия, как упор о жидкую среду, как и у гребного винта, означает потерю эффективности за счет неизбежного неэффективного "провала" движителя в среду.
Т.е., чем менее вязкая и менее плотная среда, тем с большей скоростью и большими энергетическими затратами пришлось бы осуществлять гребковое движение движителя. В этом случае неизбежен путь, приводящий к водометному варианту отталкивания движителя от отбрасываемой им среды.
На самом деле вопрос эффективности работы движителя должен сводиться к решению задачи действия движителя именно в подвижной среде без применения аналогии с упором о твердое тело.
Решение задачи повышения эффективности средств движения может заключаться только в том, чтобы в работе движителей использовались принципы возникновения гидро- или аэродинамических сил в подвижных средах.
Обратившись к явлению возникновения подъемной силы крыла, находим (АЭРОДИНАМИКА. А.М.Мхитарян. Машиностроение. М., 1976. 448 с.) многочисленные экспериментальные и теоретические результаты, подтверждающие природу ее возникновения за счет вихревого движения среды. Прямые аналогии и модели общей теоретической механики не объясняют, например, существования подъемной силы при отрицательных углах атаки крыла. Не объясняется также и ее большая величина при малых положительных углах атаки. А потому уместно сразу воспользоваться условиями взаимодействия крыла со встречным потоком, например, жидкости.
Сущность изобретения
Из вышеизложенного следуют необходимые начальные условия для решения задачи:
1. Движитель должен быть гибкой и упругой пластиной.
2. Располагаться пластина должна так, что в начальном или пассивном положении ее поверхности лежат вдоль направления потока.
3. Прикладываемое внешнее воздействие должно быть перпендикулярно к направлению потока и к самой поверхности движителя.
4. Под воздействием внешней силы точка захвата основания, фронтовой передней части движителя, должна возвратно-поступательно перемещаться перпендикулярно к направлению потока.
5. Под воздействием прикладываемой внешней силы движитель в процессе движения должен изгибаться и принимать формы, оптимальные в соответствии с его взаимодействием со средой, аналогичные форме крыла.
6. Точка приложения внешнего воздействия, внешней силы, должна быть такой, чтобы взаимодействие движителя со средой порождало максимальную по отношению к выбранному направлению движения судна силу тяги.
7. Должен быть исключен гребковый принцип отталкивания от среды.
8. Под действием движителя в среде должен образовываться вихревой поток, противоположный поступательному движению судна. В соответствии с законом сохранения импульса с импульсом этого потока должен быть связан и им определяться импульс движителя.
9. Роль подъемной силы должна играть внешняя прикладываемая к движителю сила.
10. На стадии перекладывания движителя потенциальная энергия, накопленная в изогнутом рабочем теле движителя, должна в процессе выпрямления этого тела превращаться в кинетическую энергию судна.
Эти условия реализуются в нашем случае.
Прежде всего, особого внимания требует вопрос определения точки приложения внешнего усилия к движителю.
Рассмотрим (фиг.1) тело, находящееся под действием внешней силы. Для определенности пусть это будет плоская пластина прямоугольной формы с размерами l×k, где l - поперечный, a k - продольный ее размеры, причем l<k. Рассматривать пластину будем в плоскости XOY прямоугольной системы координат, образованной осями X, Y и Z. В продольном направлении пластина направлена параллельно оси Z, идущей из листа.
В результате на плоскости XOY проекция пластины будет выглядеть как отрезок АВ прямой линии длиной l. Начало координат, точку О, выберем так, что она будет совпадать с точкой отбора тяги, с начальной длиной ρо. Ось ОХ направим по вертикали вниз так, что прямая, соединяющая точку О с пластиной, будет совпадать с осью ОХ. Ось OY направим в сторону возникающего поступательного движения пластины так, что траектория движения, как плоская кривая, будет расположена в плоскости XOY. Точкой С обозначим геометрический центр отрезка АВ, являющийся в нашем случае одновременно центром масс этого отрезка. Точкой О' обозначим точку захвата тягой (тросом) пластины на отрезке АВ.
Существует две крайние ситуации: первая - это когда тяга захватывает пластину в точке, соответствующей максимальному миделевому сечению, т.е. в точке С, где смещение СО'=δ точки захвата пластины тягой равно δ=0. В этом случае прикладываемая к пластине внешняя сила будет порождать максимальную противоположно направленную силу реакции среды. Это приводит к максимальным потерям в связи с совершением работы, затрачиваемой на преодоление силы реакции среды, и сила тяги не возникает. Эффективность выполнения работ в таком случае низкая. Вторая ситуация - это когда тяга захватывает пластину в точке, расположенной в середине фронтовой линии пластины. На плоскости XOY это положение соответствует точке А отрезка АВ, где δ=1/2. В этом случае сила натяжения тяги, внешняя сила, минимальна. При выводе пластины из горизонтального положения осуществляется, прежде всего, поворот пластины до положения, близкого к перпендикулярному. Сила тяги не возникает. Т.е. эффективность приложения силы и в этом случае низкая. Следует ожидать, что между двумя крайними случаями, когда δ=0 и δ=1/2 должна существовать точка, расположение захвата пластины в которой будет способствовать максимальной эффективности за счет возникновения силы тяги как результата действия двух неизбежно существующих начальных сил - внешней силы и силы реакции среды.
Эффективность действия внешней силы будем оценивать по максимуму возникающей силы тяги в зависимости от параметра δ. Физически это должно выглядеть так, что при приложении внешнего усилия к движителю возникает сила реакции среды. Вектора этих сил складываются и дают вектор результирующей силы, приводящий к поступательному движению пластины по криволинейной траектории.
Оценим то расстояние δ, на котором должна располагаться точка захвата внешней тягой пластины по отношению к геометрическому центру этой пластины.
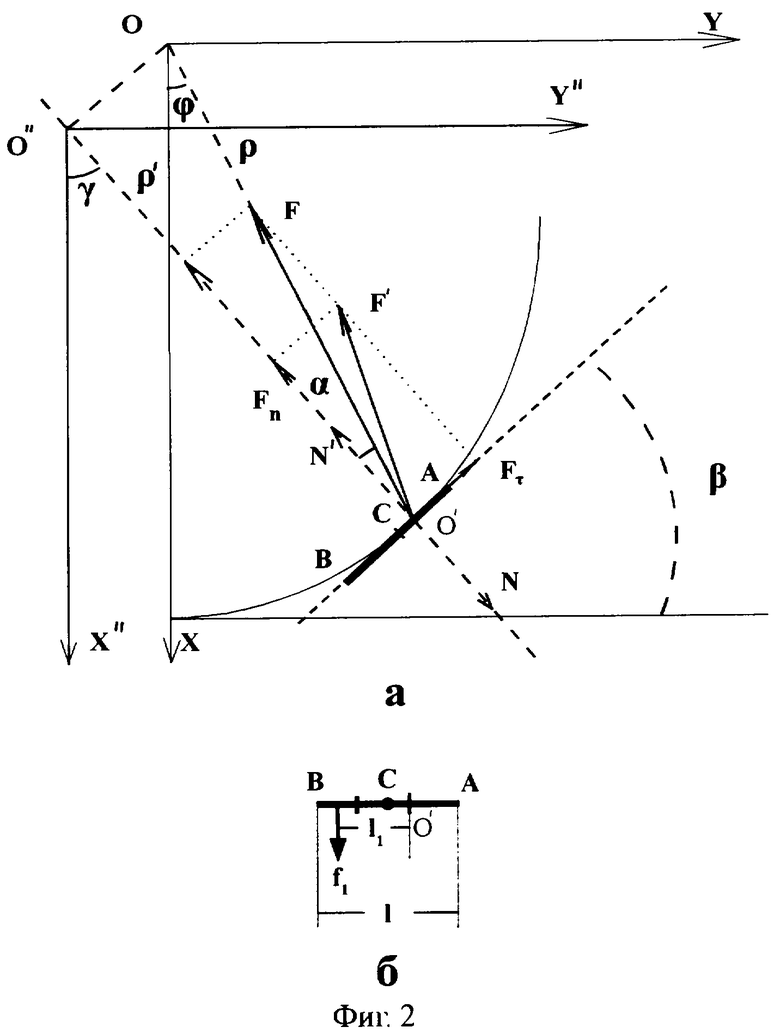
На фиг.2а приведены:
XOY - исходная прямоугольная система координат, точка О - точка отбора тяги, например, троса;
X''O''Y'' - система координат, связанная с мгновенной осью вращения, проходящей через начало координат О''. Пусть положение тела в пространстве будет характеризоваться какой-либо точкой этого тела, например, как в нашем случае, точкой его захвата. Тогда введение системы координат X''O''Y'' связано с тем, что при криволинейном движении тела имеется ось, которая в рассматриваемый момент движения находится в покое, т.е. тело в этот момент как бы совершает вращательное движение вокруг этой оси, проходящей через точку О''. Такая ось может, как в нашем случае, находиться за пределами тела. А результирующая криволинейная траектория движения тела будет представлять собой множество точек, последовательно образованных совокупностью положений в пространстве точки захвата.
ρ - мгновенная длина троса;
ρ' - расстояние от точки захвата пластины до мгновенной оси вращения О'';
F - вектор прикладываемой тяговой силы троса (здесь и далее жирными буквами будут обозначаться векторные величины);
N - вектор силы реакции среды;
На фиг.2б приведены:
АВ=l - ширина пластины;
l1 - плечо силы f1;
f1 - вектор силы, задающей вращение пластине вокруг точки О', связанной с захватом пластины тросом;
С - центр масс пластины и одновременно ее геометрический центр;
О'С=δ - расстояние смещения точки захвата пластины от центра масс С;
Fn=F·Cosα-N' - результирующая нормальная составляющая силы, действующей на пластину со стороны троса;
Fτ - тангенциальная составляющая силы, действующей на пластину со стороны троса;
F'=Fn+Fτ - та результирующая сила, которая вынуждает тело двигаться поступательно по криволинейной траектории, отличающейся от окружности;
β - угол между мгновенным направлением движения пластины и осью Y;
γ - мгновенное значение угла поворота мгновенного радиуса ρ' по отношению к оси O''Х'';
ϕ - угол отклонения троса от вертикальной оси X;
α - угол между тросом и мгновенным радиус-вектором ρ'.
Момент M1 (нежирными буквами в дальнейшем обозначаются модули соответствующих векторов) силы Fτ, прикладываемой к пластине и имеющей плечо ρ', определяется произведением силы на плечо. Тот же момент силы определяется моментом инерции JO'' системы и приобретенным угловым ускорением d2γ/dt2. Тогда имеет место равенство

(Н.И.Карякин, К.Н.Быстров, П.С.Киреев. Краткий справочник по физике. "Высшая школа". М., 1962).
Другой момент М2 силы f1, действующей на пластину с плечом l1, причем в этом случае момент инерции - JО' и угловое ускорение - d2β/dt2 определяются равенством

Рассмотрим случай равенства углов γ=β и соответствующих угловых ускорений d2γ/dt2=d2β/dt2.
Случай γ<β соответствует тому, что d2γ/dt2<d2β/dt2, т.е. в соответствии с геометрией фиг.7а, б пластина под действием троса будет разворачиваться по часовой стрелке. При этом пластина будет приобретать поступательное движение назад. Случай γ>β соответствует тому, что d2γ/dt2>d2β/dt2, т.е. пластина под действием троса будет разворачиваться против часовой стрелки. Но при этом согласно геометрии фиг.7а, б будет уменьшаться сила реакции среды N. В результате сила F становится просто силой, тянущей за собой тело, но не той силой, которая действует в поперечном к поступательному направлению движении затопленного тела.
Тогда имеет место равенство

Поскольку


(m - эффективная равномерно распределенная масса пластины, включающая присоединенную массу [Л.Д.Ландау, Е.М.Лифшиц. Гидродинамика. "Наука". 1988]),

то из равенства (3) с учетом (4), (5) и (6) вытекает

Обозначив всю совокупность сомножителей, не зависящих от δ, буквой К, равной

перепишем равенство (7) в виде

Тогда первая производная Fτ ' функции Fτ по δ может быть записана в виде

Равенство нулю первой производной Fτ '=0 определяет то значение величины δ, при котором функция Fτ имеет экстремум (И.Н.Бронштейн, К.А.Семендяев. Справочник по математике. "Наука". 1964). Опуская очевидные промежуточные выражения и преобразования, запишем,

А поскольку вторая производная Fτ '' меньше нуля

то полученное значение величины δ определяет максимум функции Fτ от δ.
Если же учесть, что сила тяги Fτ=F·Sinα, то оказывается, что при

затопленное тело приобретает максимальное тангенциальное ускорение при заданной прикладываемой силе F и растет с ростом угла α пропорционально Sinα.
Этот же угол α задает угол между вектором силы N реакции среды, воздействующей на пластину, и прямой, вдоль которой действует прикладываемая к пластине сила F. Отсюда следует, что упругость и гибкость пластины должны в процессе работы задавать такое значение угла α, которое соответствует условию возникновения максимальной силы тяги.
Таким образом оказывается, что размещение точки захвата пластины в соответствии с условием δ=0,2887·l позволяет достичь оптимальных условий перемещения пластины под действием результирующей двух сил - тяговой силы троса и силы реакции среды. В этом случае поступательное движение тела энергетически оптимально уже хотя бы потому, что движение пластины осуществляется в соответствии с теми условиями, которые приводят к минимуму энергетических потерь движущегося тела. Т.е., имея в своем распоряжении оборудование, позволяющее развить тяговую силу F, следует определять точку захвата пластины на основании полученного условия. Тогда возникающая скорость перемещения пластины будет максимальной, а соответствующие энергетические затраты на преодоление сил сопротивления среды - минимальными.
Необходимо обратить внимание на то, что точка, характеризующаяся условием δ=0,2887·l, оказывается в области так называемого фокуса профиля крыла, определяющегося из других соображений. Это понятие используется в самолетостроении (АЭРОДИНАМИКА. A.M.Мхитарян. Машиностроение. М., 1976. 448 с.) при выборе оптимальной формы крыла в целях, в частности, определения такого профиля крыла, при котором крыло будет иметь максимальную подъемную силу при наилучшем его качестве.
Применим полученное выше условие (13), как правило, для решения нашей задачи - разработки наших способа и устройства.
Пусть пластина будет закреплена тягой в виде не троса, а подвижного вдоль оси ОХ штока, через который осуществляется воздействие на пластину. Пусть также шток будет лишен возможности вращения в точке О системы координат XOY. А сама точка О пусть будет жестко связана с плавсредством. Тогда (фиг.3), если реализуем внешнее воздействие в виде знакопеременной периодической силы, принуждающей точку захвата пластины к возвратно-поступательному движению, то следует ожидать возникновения результирующей силы тяги вперед. Эта сила тяги, приложенная к плавательному аппарату, приведет к его поступательному движению. При этом совершаемые вынужденные колебания точки захвата пластины будут являться движениями, поперечными по отношению к направлению движения плавсредства, что идеально соответствует машущему движению крыла птицы и хвоста рыбы. Одновременно это означает, что все ранее предложенные средства возбуждения силы тяги в текучих средах, ориентированные на колебательное веероподобное движение движителя, принципиально противоречат условию максимальной эффективности δ=0,2887·l и, следовательно, по определению имеют меньший коэффициент полезного действия, чем в предлагаемом случае.
В таком случае не возникает необходимость задавать угол атаки движителя, поскольку движитель под воздействием внешних сил и условий сам, деформируясь, принимает энергетически выгодные форму и угол атаки.
При работе движителя возникает вихревой поток (фиг.4), формирующийся сходящими с движителя замкнутыми вихрями типа тора. При этом направление вихревого потока (фиг.5) прямо противоположно направлению силы тяги. Поток формируется группой вихрей, образующих за движителем дорожку типа дорожки Кармана (Н.Е.Кочин, Н.В.Розе. Введение в теоретическую гидромеханику. Гос. технико-теоретическое издательство. М., Л. 1932 г. 316 стр.). Здесь уместна аналогия с картиной возникновения подъемной силы крыла, движущегося в текущей среде с некоторой скоростью при небольших углах атаки, примерно 5-10 градусов, у крыла возникает значительная подъемная сила. В нашем случае, прикладывая к пластине внешнюю силу так, что она играет роль подъемной силы, а деформации изгиба пластины приводят ее форму к форме крыла, мы создаем для внешней текучей среды условия, при которых возникающее вихревое движение среды должно быть таким, чтобы оно соответствовало подъемной силе. В этом смысле наш способ возбуждения движения среды является обратным способу возникновения подъемной силы крыла, находящегося в движущемся потоке. В этом случае исключено применение текучей среды в качестве упора, а потому исключен элемент движения "провал" движителя в среду.
Проблема неэффективной стадии "перекладывания движителя", сопутствующая известным способам и устройствам, в предлагаемом решении снимается полностью тем, что в предлагаемом решении движитель в этой стадии распрямляется и возвращает потенциальную энергию изгиба в виде кинетической энергии поступательного движения плавательного аппарата вперед.
Простой поворот движителя на любой угол изменяет на этот же угол направление действия силы тяги. Это приводит к возможности перемещения судна под любым углом по отношению к его продольной оси.
Изобретение поясняется иллюстрациями, на которых:
Фиг.1. Вид сбоку (сечение) АВ пластины. XOY - декартова система координат; начальная точка О совпадает с точкой отбора троса OO'; О' - точка захвата пластины тросом. С - геометрический центр пластины. S - траектория и направление движения пластины.  - вектор внешней силы, прикладываемой через трос к пластине.
- вектор внешней силы, прикладываемой через трос к пластине.
Фиг.2а - вид сбоку (сечение) пластины АВ в движении; XOY - исходная система координат, X''O''Y'' - мгновенная система координат; F - вектор внешней силы, N - вектор силы реакции среды, б - вид сбоку пластины АВ в начальном положении.
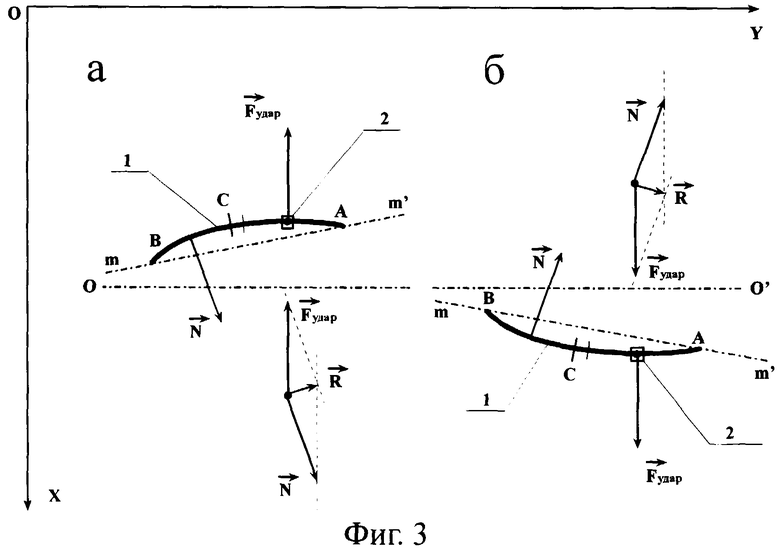
Фиг.3. В системе координат XOY изображены две стадии движения гибкой пластины 1 (АВ) под действием внешней силы удара Fудар, прикладываемой к пластине через шток в точке 2: а - сила удара направлена вверх; б - сила удара направлена вниз. Ось OY соответствует направлению движения пластины. Ось ОХ соответствует вертикальной прямой, вдоль которой шток осуществляет свое собственное возвратно-поступательное движение и движение точки захвата пластины. Векторами N показаны силы реакции среды. OO' - линия горизонта; mm' - хорда изогнутой пластины. Угол между отрезками прямых mm' и OO' соответствует углу атаки, порожденному деформацией пластины и силами удара и реакции среды. Отдельно вынесены параллелограммы сил Fудар и N, с помощью которых геометрически определяется вектор силы тяги R.
Фиг.4. Схематично показано образование цепочки вихрей, образующейся за действующей пластиной, движущейся в среде со скоростью V. Цифрами 4, 5, 6 отмечены последовательные во времени и пространстве положения пластины при прохождении срединной линии поступательного движения движителя вперед. Замкнутые и незамкнутые кривые со стрелкой указывают направления движения частиц среды. Замкнутые кривые отражают отдельные вихри положительной и отрицательной интенсивности.
Фиг.5. Приведена фотография вихревого следа за кормой действующей модели, использованной в настоящей работе. След отразился в виде расширяющейся слева направо полосы возмущений на поверхности воды. Модель движется справа налево.
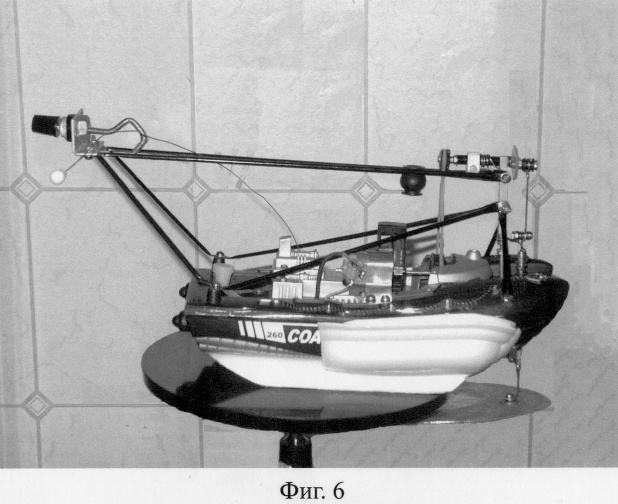
Фиг.6. Фотография общего вида радиоуправляемой модели плавающего средства, несущего на себе источники питания - 4 элемента типа АА (1,5 В), электрический двигатель постоянного тока (напряжение питания 6 В), понижающий число оборотов редуктор, кривошипно-шатунный механизм, преобразующий вращательное движение вала редуктора в возвратно-поступательное движение штока, к затопленному концу которого крепится движитель.
Фиг.7. Вид сбоку (а) и вид сверху (б) действующей модели. 11 - корпус модели, 12 - электрический двигатель, 13 - шестеренчатая часть редуктора, 14 - ременная часть редуктора, 15 - вал, 16 - кривошип, 17 - шатун, 18 - шток, 19 - точка захвата движителя штоком, 20 - движитель.
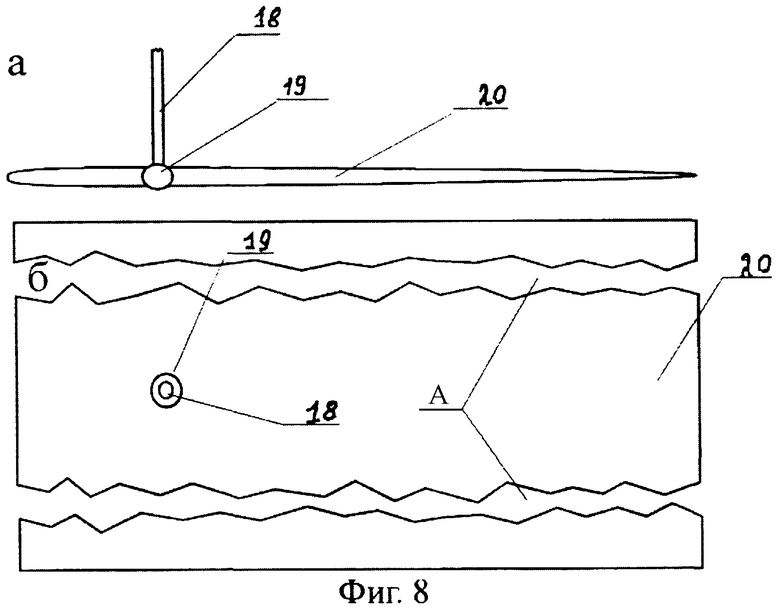
Фиг.8. Вид сбоку (а) и вид сверху (б) движителя (1) со штоком (2) и точкой (3) захвата штоком движителя.
Фиг.9. Схематически в плане показаны контуры прямоугольного (а) и эллиптического (б) движителей. 21 - тело прямоугольного движителя; 19 - точка захвата движителя штоком; 23 - внешняя и 24 - внутренняя части эллиптического движителя.
Фиг.10. Фотография эллиптического движителя, использованного в экспериментальных исследованиях.
Фиг.11. Наиболее характерная зависимость коэффициента полезного действия η от относительной поступи λ гребного винта летательного аппарата (Гидроаэродинамика. Л. Прандтль. R@C Dynamics. Москва-Ижевск: НИЦ "Регулярная и хаотическая динамика", 2002, 572 стр.).
Способ создания силы тяги в подвижных средах и устройство для его осуществления реализуются следующим образом.
Для реализации предлагаемых способа и устройства используется метод физического моделирования.
В качестве плавательного средства, приводящего движитель в действие, использовалась модель катера, общий вид которой показан в виде фотографии на фиг.6; модель с движителем расположена на лабораторном демонстрационном столике. На фиг.7 схематически показаны виды сбоку (а) и сверху (б) модели. Здесь 11 - корпус модели, 12 - электрический двигатель, 13 - шестеренчатая часть редуктора, 14 - ременная часть редуктора, 15 - вал, 16 - кривошип, 17 - шатун, 18 - шток, 19 - точка захвата движителя штоком, 20 - движитель. Во внутренность корпуса модели встроены радиоэлектронная схема включения и выключения электрического двигателя постоянного тока и источники питания - четыре элемента по 1,5 В. Палубная надстройка содержит электрический двигатель, редуктор для понижения числа оборотов с 75 до 5-7 об/с, кривошипно-шатунный механизм, задающий возвратно-поступательное движение штоку с частотой 5-7 колебаний в секунду. Размах колебаний штока для использованной модели был равен 0,018 м. Затопленная часть штока имеет захват для закрепления движителя на штоке. Палубная надстройка выполнена таким образом, что движитель располагается в передней носовой части модели и в состоянии покоя его поверхности параллельны горизонту и свободной поверхности воды.
В процессе работы шток оказывает периодическое силовое воздействие на движитель в точке его захвата в направлении нормали к поверхности этого движителя. Силовое воздействие будем называть ударным воздействием или просто ударом.
Движитель (фиг.8,а, б) выполнен в виде гибкой упругой прямоугольной пластины. На штоке он закрепляется в соответствии с условием δ=0,2887·l. Возвратно-поступательные движения точки захвата движителя штоком приводят к колебательным движениям тела самого движителя, сопровождаемым изгибными знакопеременными деформациями. Эти движения аналогичны движениям рыбьего хвоста или крыла птицы. При этом возникает сила тяги, передающаяся через жесткую конструкцию, на которую опирается шток, всей модели катера. Это приводит катер в движение вперед.
Такая реализация способа создания силы тяги принципиально отличает его от вариантов веероподобного движения движителя или движения движителя "с провалом" в текучих средах.
Наблюдения за поведением движителя в процессе работы позволили заметить, что при ударном силовом воздействии форма движителя демонстрирует наличие таких деформаций прямоугольного движителя, которые снижают эффективность его работы. Это изгибные деформации, инициируемые передними углами движителя. В связи с этим была принята модель движителя с усечением передних углов. На фиг.9а, б показан вид сверху для прямоугольной пластины (а) и пластины с усеченными углами (б). Контур усечения определялся из условия, что он соответствует половине эллипса сжатого или вытянутого по отношению к направлению действия силы тяги вдоль линии симметрии (диаметра) эллипса. Нормаль, восстановленная из точки эллиптического контура внутрь до пересечения с задней линией движителя, образовывала отрезок прямой длиной l. Применение к этой прямой условия δ=0,2887·l определяло точку внутреннего контура, полное множество этих точек определяло весь внутренний контур движителя. В результате все тело движителя разделялось на две части - внешнюю (23) и внутреннюю (24) так, как это показано на фиг.9б.
Часть 23 выполнялась из гибкого и упругого полимерного материала толщиной 0,0004 м. Она играла роль несущей части движителя. Для удобства назовем часть 23 движителя стволом. Именно на ней выбиралась точка 19 захвата движителя. В процессе удара ствол испытывает упругие деформации изгиба по длине и деформации кручения вокруг оси, роль которой исполняет внутренний контур ствола. Суммарные деформации были таковы, что в сечении движителя плоскостью, образованной нормалями, восстанавливаемыми в любой точке внешнего контура, движитель имел вид вогнуто-выпуклой кривой, аналогичной сечению профиля крыла птицы.
Часть 24 представляла собой тонкую (толщиной 0,00002 м) гибкую и упругую перемычку в виде полимерной пленки между левой и правой сторонами движителя так, как показано на фиг.9б. На фиг.10 приведена фотография движителя, использованного в ходе экспериментальных исследований. В процессе удара пленка ведет себя, как парус, испытывая деформации изгиба и растяжения. В силу высокой парусности эта часть движителя задает соответствующие упругие деформации более жесткой части 23 движителя.
В результате, в процессе удара в теле движителя, в его стволе, накапливается потенциальная энергия упругой деформации.
В заключительной части удара при изменении направления силового воздействия на движитель упругие деформации снимаются, а их потенциальная энергия преобразуется в кинетическую энергию движителя. В этот момент часть вихря, связанная с движителем, отделяется от тела движителя, унося свой импульс движения и освобождая связанный с ним импульс движения движителя. В этой стадии движитель, с одной стороны, распрямляющийся в своей задней части, а, с другой стороны, вовлекаемый в передней части в движение в противоположном направлении, ведет себя подобно удару хлыста, энергия движения которого концентрируется и излучается в окружающую среду в виде громкого щелчка. Аналогично, движитель сбрасывает с себя связанную с ним часть вихря, приобретая при этом импульс, противоположный импульсу сброшенной части вихря.
Приведем результаты экспериментальных наблюдений и измерений.
Измеряемые величины.
Fcp - сила, действующая на шток: определяется динамометром в процессе работы.
Угловая скорость ω определялась числом n возвратно-поступательных движений штока за одну секунду, умноженным на 2π радиан.
Сила тяги Fтяги, создаваемая движителем, определялась путем ее измерения с помощью динамометра, закрепленного с одной стороны корпусом в штативе, а с другой стороны захватом для измерений за корпус модели. Динамометр располагался параллельно свободной поверхности воды; высота расположения - 1 см над поверхностью. Удержание действующей модели на месте с помощью динамометра позволяло измерить силу тяги.
Скорость V установившегося движения модели под действием силы тяги определялась путем измерения интервала времени Δt прохождения моделью заранее заданного интервала пути ΔS.
Плечо r кривошипа, равное 0,008 метра, конструктивно определило полный путь s, проходимый штоком за один полный цикл его возвратно-поступательного движения, как s=4×r=0,032 м. В свою очередь, величина d=s×n определяет путь, пройденный штоком или точкой захвата движителя штоком за одну секунду; поэтому средняя скорость U движения численно равна d.
Рассчитываемые величины.
Коэффициент полезного действия η определяется отношением

где Апол - полезная работа движителя, а Азатр - затраченная работа движителя. Поскольку мощность - это работа в единицу времени, то Nпол=Апол/Δt, а Nзатр=Азатр/Δt, где Δt - интервал времени (в нашем случае Δt=1с), в течение которого выполнялась работа. Тогда коэффициент полезного действия может быть определен как

Определим полезную мощность из выражения

а затрачиваемую мощность как

Для сравнения в дальнейшем с гребным винтом введем еще такую характеристику, как относительная поступь λ, определяемую выражением

где V - скорость поступательного движения движителя или, для дальнейшего сравнения, гребного винта, a U=d·Δt - скорость прохождения движителем пути d за интервал времени Δt (в нашем случае Δt=1c) или U=r·ω - окружная скорость упомянутого винта.
В табл.1 приведены результаты измерений и вычислений для предлагаемого движителя, а также для сравнения приведены данные для модели с гребным винтовым движителем (Сахновский Б.М. Модели судов новых типов. Судостроение, 1987 г. http//www.shipmodeling.ru/books/NewTypeShips/newtypeships.pdf.).
движитель
Дополнительная информация. О зависимости коэффициента полезного действия η от относительной поступи λ, известно (фиг.11 из книги: Гидроаэродинамика. Л. Прандтль. R@C Dynamics. Москва-Ижевск: НИЦ "Регулярная и хаотическая динамика". 2002, 572 стр.), что максимальное значение ηmax коэффициента полезного действия для винта летательного аппарата достигает значения 80% при относительной поступи λ≈0,25. При меньших значениях λ, близких к нулю, летательный аппарат приближается к состоянию покоя, а винт находится в режиме холостого хода, т.е. η=0. При значениях λ, больших указанного значения, летательный аппарат движется с такой скоростью, что встречный поток начинает раскручивать винт, что схоже с режимом холостого хода винта. И в этом случае η=0. Т.е. полет летательного аппарата с поступью винта, близкой к единице, вообще исключен из возможных режимов движения.
Обращаясь к результатам, содержащимся в табл.1, видим, что в случае плавательной модели гребной винт дает более низкое значение коэффициента полезного действия η=45%, чем для предлагаемых нами средств, для которых η=76%. Существенно и различие в значениях относительной поступи для предлагаемых средств λ=1,1, что приблизительно на 30% выше значения λ=0,855 относительной поступи для гребного винта.
Модель с гребным винтом движется в семь с половиной раз быстрее - 1,5>0,2 м/с, но при этом и энергетические потери у модели с гребным винтом весьма существенные 7,34/0,0264=282!!!
Т.е. "провал" в среду, сопровождающий гребковые движители, приводит к существенным экономическим потерям.
Полученные результаты позволяют судить о существенном экономическом выигрыше предлагаемых безопорных вихревых средств возбуждения силы тяги перед всеми вариантами гребковых средств.
Применение спаренных, но действующих в противоположных фазах движителей, снимет с корпуса плавательного средства вибрацию. Вместе с тем затраты энергии на эту вибрацию будут преобразованы в кинетическую энергию поступательного движения плавательного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ВОЛНОВАЯ ТУРБИНА "УСТЮГ" | 2005 |
|
RU2303708C2 |
| ПРОПЕЛЛЕР "УСТЮГ" | 2005 |
|
RU2310580C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЗАТОПЛЕННОГО ТЕЛА | 2003 |
|
RU2259302C2 |
| СООРУЖЕНИЕ ДЛЯ АКТИВНОГО ВОЗДЕЙСТВИЯ НА ВИХРЕВЫЕ АТМОСФЕРНЫЕ ОБРАЗОВАНИЯ | 2005 |
|
RU2295853C1 |
| СПОСОБ ВОЗВРАТНО-ВИХРЕВОГО ТУРБУЛЕНТНОГО ПОДАВЛЕНИЯ КРУПНОМАСШТАБНОГО СИНОПТИЧЕСКОГО ВИХРЕОБРАЗОВАНИЯ | 2003 |
|
RU2251835C2 |
| АКТИВНАЯ КЛАПАННАЯ РЕШЕТКА | 2010 |
|
RU2452661C2 |
| КОЛЕБЛЮЩИЙСЯ ДВИЖИТЕЛЬ | 2014 |
|
RU2631742C1 |
| СУДНО И ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВОЛН | 2001 |
|
RU2217342C2 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |






Способ создания силы тяги в подвижных средах включает в себя возвратно-поступательное перемещение штока с гибкой и упругой пластиной, прикрепленной к его концу, причем центр места крепления штока расположен на оси симметрии пластины и смещен от ее геометрического центра к передней кромке на расстояние δ=0,2887·l, где l - ширина пластины от фронтальной линии контура до задней линии контура. Этот способ создания силы тяги реализуется при работе устройства, в котором гибкая и упругая пластина состоит из двух частей, передняя из которых выполнена жесткой, а задняя - в виде пленки. Контур этой пластины имеет форму усеченного эллипса, одна из осей которого является задней линией контура. Технический результат - повышение КПД. 2 н.п. ф-лы, 11 ил., 1 табл.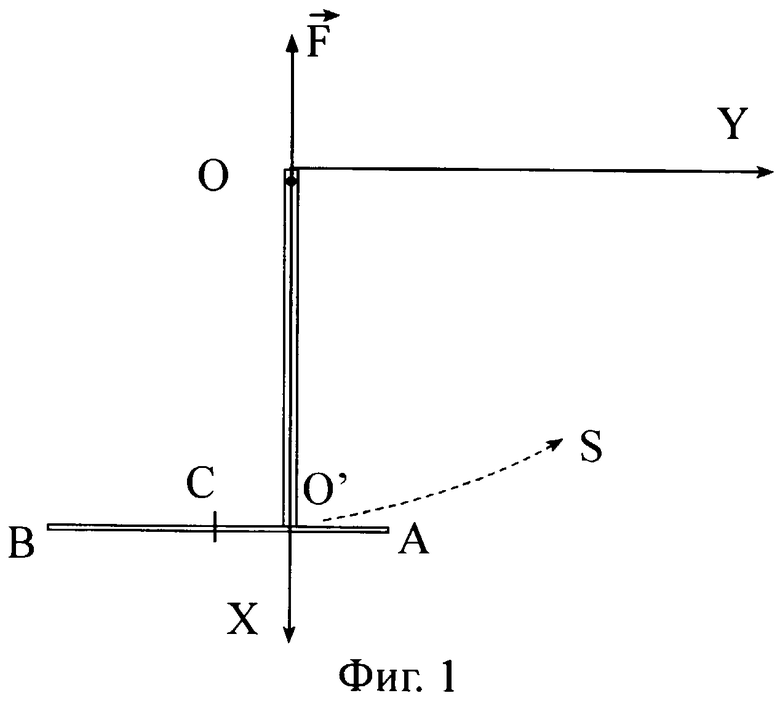
| US 4371347 А, 01.02.1983 | |||
| СПОСОБ СОЗДАНИЯ ДВИЖУЩЕЙ СИЛЫ АППАРАТА В ТЕКУЧЕЙ СРЕДЕ И ДВИЖИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2172700C2 |
| УСОВЕРШЕНСТВОВАННАЯ ГАЗОВАЯ ГОРЕЛКА | 2015 |
|
RU2669886C1 |
| ЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ РАЗЪЕМНОГО СОЕДИНЕНИЯ ДВУХ ПРОФИЛЬНЫХ ДЕТАЛЕЙ | 1996 |
|
RU2173415C2 |

