Область техники, к которой относится изобретение
Данное изобретение относится, к области авиации, в частности к системам и способам управления летательными аппаратами.
Уровень техники
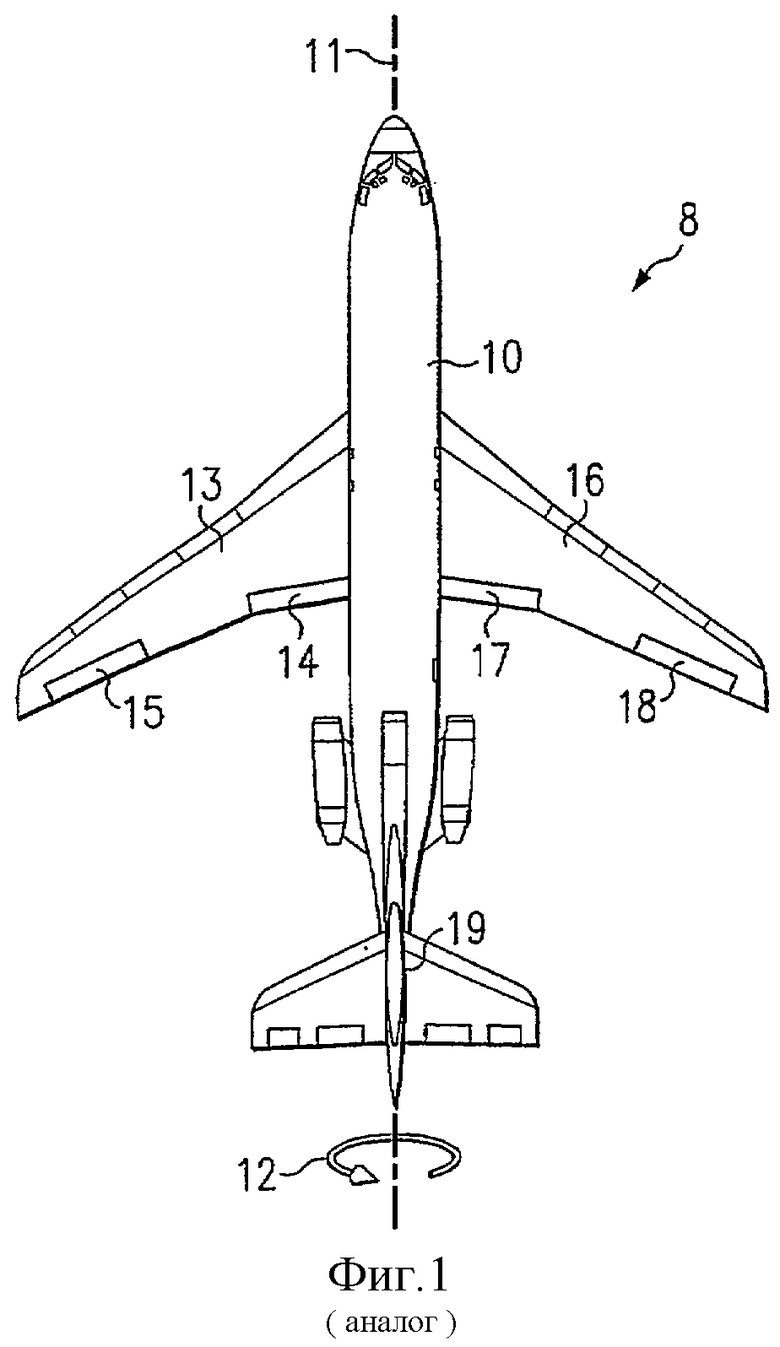
Летательные аппараты обычно имеют различные рулевые поверхности, отклонение которых обеспечивает летательному аппарату управляемость в полете. На фиг.1 изображен самолет 8 с традиционными рулевыми поверхностями. Самолет 8 имеет корпус (фюзеляж) 10, первое полукрыло (консоль крыла) 13, второе полукрыло 16 и киль 19. Первое полукрыло 13 снабжено подвижно установленными закрылком 14 и элероном 15, а второе полукрыло 16 - подвижно установленными закрылком 17 и элероном 18. Закрылки 14 и 17 могут выдвигаться из задней кромки первого полукрыла 13 и второго полукрыла 16 соответственно, увеличивая действующую на самолет 8 подъемную силу, благодаря чему самолет 8 может набирать высоту. С другой стороны, на первом полукрыле 13 и втором полукрыле 16 шарнирно закреплены соответственно элерон 15 и элерон 18, которые могут отклоняться относительно задней кромки первого полукрыла 13 и второго полукрыла 16 соответственно, создавая прирост или уменьшение подъемной силы на соответствующем полукрыле. Благодаря расстоянию, на котором элероны расположены от продольной оси 11 самолета 8, под действием прироста или уменьшения подъемной силы, создаваемых при отклонении элерона 15 или элерона 18, самолет 8 легко поворачивается относительно продольной оси 11, т.е. совершает эволюцию по крену. Например, отклонение элерона 15 вниз создает прирост подъемной силы, а отклонение элерона 18 вверх уменьшает подъемную силу, что в совокупности приводит к кренению самолета 8 в направлении стрелки 12. Как правило, для кренения самолета 8 в любую сторону элерон 15 и элерон 18 отклоняются в противоположных направлениях одновременно или раздельно. Следует отметить, что элерон 15 и элерон 18 также могут использоваться при совершении разворотов (виражей), особенно координированных разворотов. Кроме того, для поворота самолета 8 влево или вправо, т.е. управления самолетом по курсу, может отклоняться руль направления 19. Вместе с тем, руль направления 19 может использоваться и при маневрировании по крену, как это рассматривается ниже.
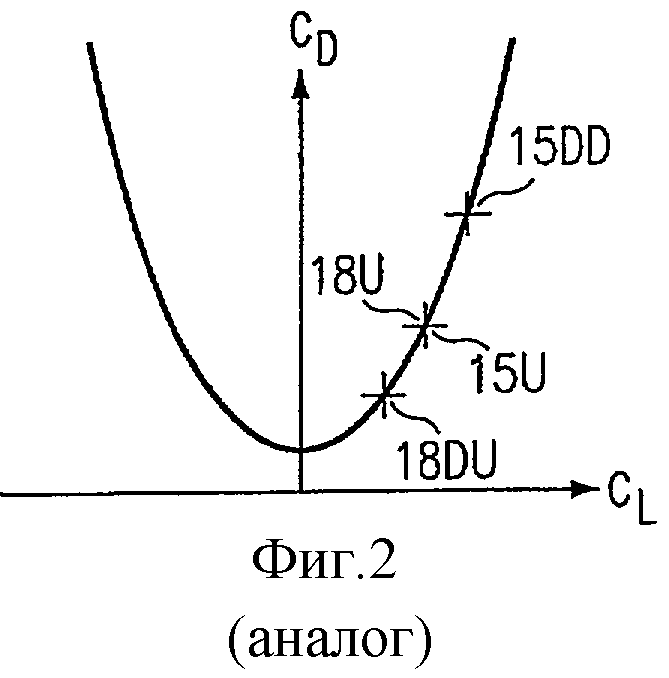
На фиг.2 приведен график, иллюстрирующий зависимость между коэффициентом аэродинамического сопротивления и коэффициентом подъемной силы для первого полукрыла 13 и второго полукрыла 16 при отклонении элерона 15 и элерона 18 соответственно. Здесь следует отметить, что коэффициент подъемной силы и коэффициент аэродинамического сопротивления при их умножении на площадь несущей поверхности и квадрат скорости дают действительные значения подъемной силы и аэродинамического сопротивления. В горизонтальном прямолинейном полете самолета 8, элерон 15 и элерон 18 обычно устанавливаются в положения, при которых первое полукрыло 13 и второе полукрыло 16 имеют практически равные коэффициенты подъемной силы и аэродинамического сопротивления, как это представлено на графике соответственно точкой 15U и точкой 18U, что обеспечивает поперечную и путевую балансировку самолета 8. Однако в случае необходимости кренения самолета 8 коэффициент подъемной силы и коэффициент аэродинамического сопротивления для первого полукрыла 13 и второго полукрыла 16 изменяются посредством отклонения элерона 15 и элерона 18 соответственно. Например, для ввода самолета 8 в крен в направлении стрелки 12 на фиг.1, элерон 15 отклоняется вниз, увеличивая коэффициент подъемной силы и соответственно увеличивая коэффициент аэродинамического сопротивления, как это представлено на графике точкой 15DD, а элерон 18 отклоняется вверх, уменьшая коэффициент подъемной силы и соответственно увеличивая коэффициент аэродинамического сопротивления, как это представлено на графике точкой 18DU. Прирост подъемной силы, создаваемый отклонением элерона 15, и уменьшение подъемной силы, создаваемое отклонением элерона 18, вызывают крен самолета 8 в направлении стрелки 12. Вместе с тем, прирост аэродинамического сопротивления, обусловленный отклонением элерона 15, и уменьшение аэродинамического сопротивления, обусловленное отклонением элерона 18, создают момент, поворачивающий самолет 8 относительно его вертикальной оси в направлении первого полукрыла 13, т.е. действующий против крена.
Как правило, действующий против крена путевой момент не представляет собой проблемы, так как летательные аппараты имеют такие рулевые поверхности, как рули направления или дифференциальные управляемые тормозные щитки, которые могут компенсировать индуцируемый кренением путевой момент. Например, такой индуцированный путевой момент можно парировать отклонением руля направления 19 самолета 8. Но у тех летательных аппаратов, которые не имеют таких рулевых поверхностей или в которых такие рулевые поверхности не используются из соображений уменьшения эффективной поверхности рассеяния, парировать действующий против крена путевой момент или ему противоположный, т.е. действующий по крену, при маневрировании по крену становится труднее.
Сущность изобретения
Предложены система и способ, значительно исправляющие или устраняющие по меньшей мере некоторые из недостатков и проблем, свойственных ранее созданным управляющим поверхностям летательных аппаратов. Соответственно, в определенных вариантах своего осуществления настоящее изобретение относится к системе и способу, позволяющим парировать путевой момент при совершении летательным аппаратом по меньшей мере определенных эволюции по крену без использования руля направления или дифференциально управляемых тормозных щитков.
В частных формах выполнения предложенная система включает в себя корпус летательного аппарата, первую несущую поверхность и вторую несущую поверхность (входящие в состав планера летательного аппарата). Первая несущая поверхность присоединена к корпусу с первой стороны, а вторая несущая поверхность присоединена к корпусу со второй стороны, причем по меньшей мере часть первой несущей поверхности и по меньшей мере часть второй несущей поверхности имеют возможность управляемого отклонения для управления летательным аппаратом по крену. Отклоняемая часть первой несущей поверхности может отклоняться с созданием прироста подъемной силы и обусловленного им прироста аэродинамического сопротивления по меньшей мере на участке первой несущей поверхности, а отклоняемая часть второй несущей поверхности может отклоняться с созданием отрицательной подъемной силы и обусловленного ей прироста аэродинамического сопротивления по меньшей мере на участке второй несущей поверхности при совершении летательным аппаратом по меньшей мере одной эволюции по крену, причем прирост подъемной силы на первой несущей поверхности и уменьшение подъемной силы на второй несущей поверхности вызывают крен летательного аппарата, а прирост аэродинамического сопротивления на второй несущей поверхности создает путевой момент, который уравновешивает путевой момент, создаваемый приростом аэродинамического сопротивления на первой несущей поверхности, так, чтобы кренение летательного аппарата не вызывало существенного изменения его путевого момента.
В других формах выполнения изобретения предложенный способ предусматривает отклонение по меньшей мере части первой несущей поверхности летательного аппарата для создания прироста подъемной силы и обусловленного им прироста аэродинамического сопротивления по меньшей мере на участке несущей поверхности для обеспечения эволюции летательного аппарата по крену, и отклонение по меньшей мере части второй несущей поверхности летательного аппарата для создания отрицательной подъемной силы и обусловленного ей прироста аэродинамического сопротивления по меньшей мере на участке несущей поверхности для обеспечения этой эволюции по крену. Прирост подъемной силы на первой несущей поверхности и уменьшение подъемной силы на второй несущей поверхности создают поперечный момент, вызывающий кренение летательного аппарата, а прирост аэродинамического сопротивления на второй несущей поверхности создает путевой момент, который уравновешивает путевой момент, создаваемый приростом аэродинамического сопротивления на первой несущей поверхности, так, чтобы кренение летательного аппарата не вызывало существенного изменения его путевого момента.
У настоящего изобретения есть несколько технических особенностей и преимуществ. Например, в некоторых формах осуществления изобретение позволяет летательному аппарату маневрировать по крену без существенного изменения путевого момента летательного аппарата, что делает возможным совершение летательным аппаратом эволюции по крену без значительных путевых моментов, действующих против крена. Это способность может быть особенно полезной при совершении координированных разворотов летательными аппаратами, специально спроектированными для достижения низкой эффективной поверхности рассеяния, поскольку использование рулей направления и тормозных щитков для парирования действующего против крена путевого момента повышает эффективную поверхность рассеяния летательного аппарата. В качестве другого примера, в некоторых вариантах осуществления изобретение обеспечивает возможность эволюции летательного аппарата по крену без существенного изменения результирующей подъемной силы, что не дает летательному аппарату терять высоту при совершении маневра. В качестве дополнительного примера, в определенных вариантах осуществления изобретение обеспечивает возможность эволюции летательного аппарата по крену без существенного изменения продольного момента, что позволяет летательному аппарату при совершении маневра сохранять пространственную ориентацию по тангажу. В качестве еще одного примера, в определенных вариантах осуществления изобретение обеспечивает возможность создания путевого момента без существенного изменения поперечного момента. Это может позволить летчику держать летательный аппарат по линии с ВПП даже в условиях бокового ветра. Кроме того, это может давать летчикам, привыкшим управлять по курсу педалями руля направления, более знакомые ощущения при пилотировании. Наряду с этим, в частных вариантах изобретения эволюция по рысканию может выполняться без существенного изменения продольного момента или результирующей подъемной силы летательного аппарата. Следует отметить, что в различных формах осуществления изобретения может быть реализована одна, несколько или все эти технические особенности и преимущества и/или дополнительные технические особенности и преимущества.
В частных вариантах выполнения, летательный аппарат имеет крыло прямой стреловидности. В некоторых из этих форм осуществления изобретения, предложенные способ и система предоставляют возможность отклонения по меньшей мере части первой несущей поверхности для создания прироста подъемной силы и обусловленного им прироста аэродинамического сопротивления по меньшей мере на участке первой несущей поверхности и отклонения по меньшей мере части второй несущей поверхности для создания отрицательной подъемной силы и обусловленного ею прироста аэродинамического сопротивления по меньшей мере на участке второй несущей поверхности, когда при совершении по меньшей мере одной эволюции по крену точки приложения этих аэродинамических сил не разнесены вдоль продольной оси. Выравниванием точек приложения этих сил относительно продольной оси достигается продольная балансировка летательного аппарата при его эволюциях по крену, а также способность летательного аппарата выполнять координированное вращение по крену, за счет того, что прирост подъемной силы, создаваемый на первой несущей поверхности, и отрицательная подъемная сила, создаваемая на второй несущей поверхности, создают поперечный момент, а увеличение путевого момента, обусловленное приростом аэродинамического сопротивления на первой несущей поверхности, уравновешивается увеличением путевого момента, создаваемым приростом аэродинамического сопротивления на второй несущей поверхности. Другие технические особенности и преимущества изобретения будут наглядным для специалистов образом раскрыты в нижеследующем описании и формуле изобретения, а также на прилагаемых чертежах.
Краткое описание чертежей
Для более глубокого понимания изобретения, особенно при его рассмотрении в свете приведенного ниже описания, и для более наглядного представления его технических особенностей и достоинств, сущность изобретения поясняется следующими чертежами:
Фиг.1 - изображение самолета с традиционными рулевыми поверхностями.
Фиг.2 - график, иллюстрирующий зависимость между коэффициентом аэродинамического сопротивления и коэффициентом подъемной силы для крыла самолета, изображенного на фиг.1, при отклонении элерона.
Фиг.3 - вид сверху одного варианта летательного аппарата, выполненного в соответствии с изобретением.
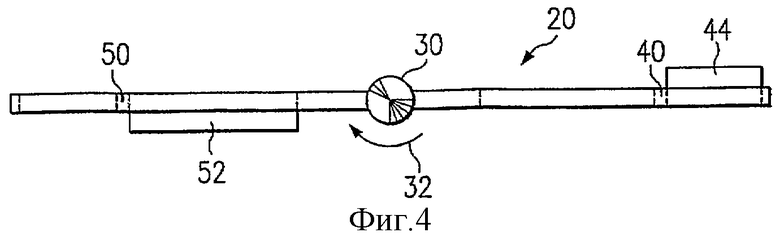
Фиг.4 - вид спереди летательного аппарата, изображенного на фиг.3, с отклоняемыми частями несущих поверхностей, установленными в отклоненное положение для кренения летательного аппарата в определенном направлении.
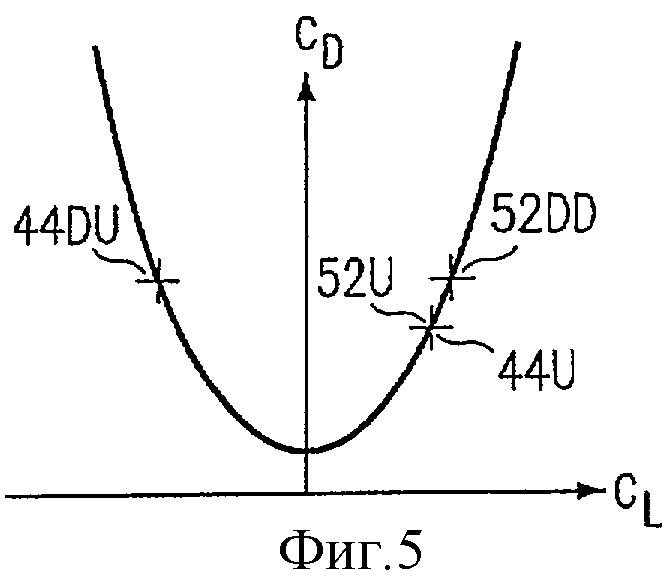
Фиг.5 - график, иллюстрирующий зависимость между коэффициентом аэродинамического сопротивления и коэффициентом подъемной силы для несущей поверхности летательного аппарата, выполненного в соответствии с изобретением.
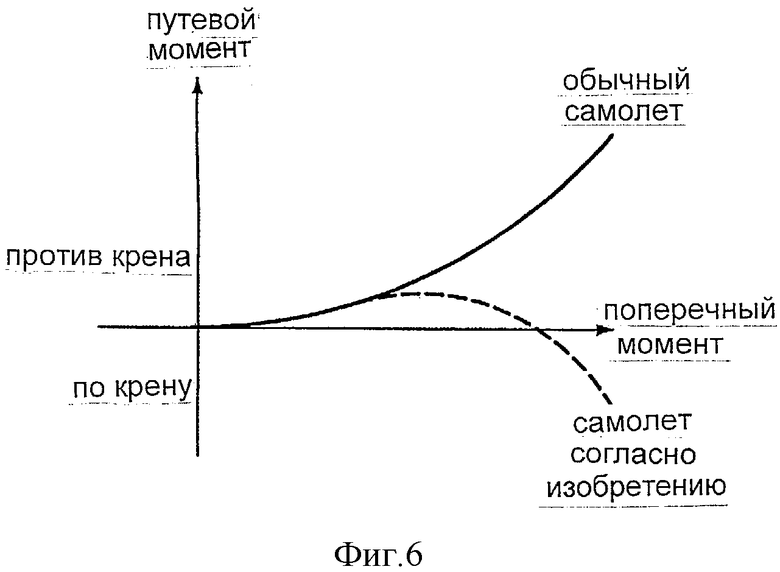
Фиг.6 - график, иллюстрирующий взаимосвязь путевого момента и поперечного момента по меньшей мере для некоторых вариантов летательного аппарата, выполненного в соответствии с изобретением, и демонстрирующий некоторые достоинства настоящего изобретения.
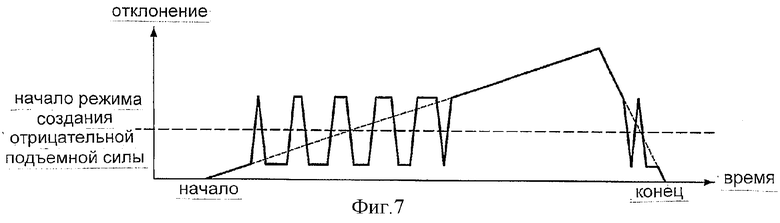
Фиг.7 - график, иллюстрирующий отклонение отклоняемой части несущей поверхности во время эволюции по крену в соответствии с одним вариантом осуществления настоящего изобретения.
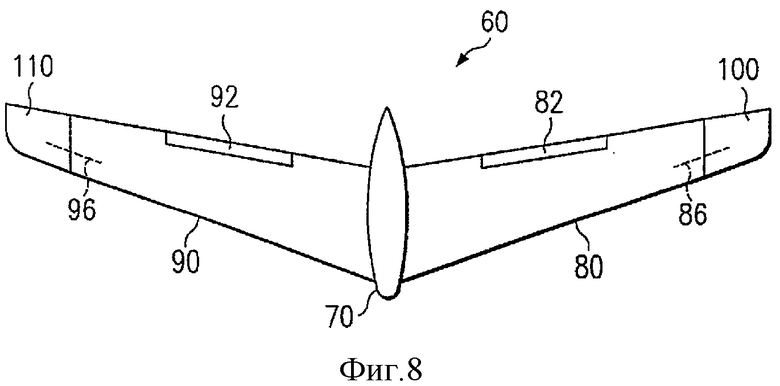
Фиг.8 - вид сверху второго варианта летательного аппарата, выполненного в соответствии с изобретением.
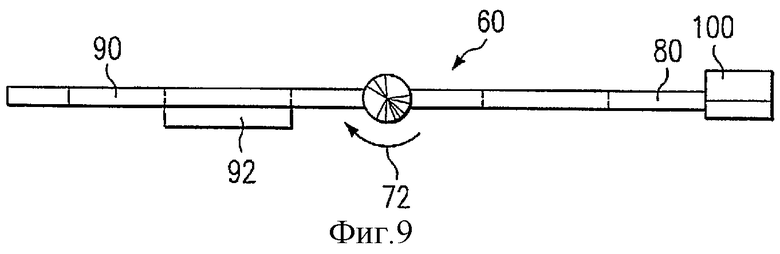
Фиг.9 - вид спереди летательного аппарата, показанного на фиг.8, с отклоняемыми частями несущих поверхностей, установленными в отклоненное положение для кренения летательного аппарата в определенном направлении.
Подробное описание изобретения
На фиг.3 представлен вид сверху одного варианта самолета 20, выполненного в соответствии с изобретением. Самолет 20 содержит корпус 30, первую несущую поверхность 40 и вторую несущую поверхность 50 (части планера самолета). Первая несущая поверхность 40, которой может быть полукрыло, консоль стабилизатора или управляемая аэродинамическая поверхность любого другого типа, содержит подвижно установленные на ней первую отклоняемую часть 42 и вторую отклоняемую часть 44, которыми могут быть элероны, закрылки, поверхности изменяемого профиля или рулевые поверхности любого другого типа, управляемые для создания прироста и/или уменьшения подъемной силы и аэродинамического сопротивления. Вторая несущая поверхность 50, которой может быть полукрыло, консоль стабилизатора или управляемая аэродинамическая поверхность любого другого типа, содержит подвижно установленные на ней первую отклоняемую часть 52 и вторую отклоняемую часть 54, которыми могут быть элероны, закрылки, поверхности изменяемого профиля или рулевые поверхности любого другого типа, управляемые для создания прироста и/или уменьшения подъемной силы и аэродинамического сопротивления. Отклонение первой отклоняемой части 42 и второй отклоняемой части 44, а также первой отклоняемой части 52 и второй отклоняемой части 54 создают прирост и/или уменьшение подъемной силы с противоположных сторон самолета 20, под действием которых самолет 20 может вращаться относительно продольной оси 22, т.е. выполнять эволюцию по крену.
Как показано на фиг.3, первая отклоняемая часть 42 и вторая отклоняемая часть 44 выполнены в виде элеронов, шарнирно установленных на первой несущей поверхности 40. Кроме того, первая отклоняемая часть 52 и вторая отклоняемая часть 54 выполнены в виде элеронов, шарнирно установленных на второй несущей поверхности 50. Отклонение элеронов в противоположных направлениях создает прирост подъемной силы с одной стороны самолета 20 и уменьшение подъемной силы с противоположной стороны самолета 20, под действием которых самолет 20 может совершать движение по крену.
Вместе с тем, поскольку у самолета 20 нет руля направления, возникновение значительных путевых моментов при эволюциях по крену для него недопустимо. Как часть решения данной проблемы, следует отметить, что вторая отклоняемая часть 44 и вторая отклоняемая часть 54 выполнены существенно меньшего размера, чем первая отклоняемая часть 42 и первая отклоняемая часть 52, порядка пятидесяти процентов размера первой отклоняемой части. Обычно размер внешних отклоняемых частей, таких как вторая отклоняемая часть 44 и вторая отклоняемая часть 54, должен составлять от 20 до 80% размера внутренних отклоняемых частей, таких как первая отклоняемая часть 42 и первая отклоняемая часть 52. Соответственно, при отклонении первой отклоняемой части 42 задней кромкой вниз, и второй отклоняемой части 54 задней кромкой вверх с кренением самолета 20 в одном направлении, или при отклонении первой отклоняемой части 52 задней кромкой вниз и второй отклоняемой части 44 задней кромкой вверх с кренением самолета 20 в другом направлении, внешняя отклоняемая часть (расположенная дальше по размаху несущей поверхности) должна отклоняться на большую величину, чем внутренняя отклоняемая часть, для создания сопоставимых сил на соответствующей части первой несущей поверхности 40 и второй несущей поверхности 50. На самом деле, отклонение внешних отклоняемых частей вверх может быть настолько большим, что несущая поверхность войдет в режим отрицательной подъемной силы. Это обстоятельство можно использовать для уравновешивания путевых моментов, возникающих при совершении самолетом 20 эволюции по крену.
На фиг.4 представлен вид спереди самолета 20 с отклоняемыми частями несущих поверхностей, установленными в отклоненное положение для кренения самолета 20 в направлении стрелки. Как показано на чертеже, вторая отклоняемая часть 44 первой несущей поверхности 40 отклонена задней кромкой вверх, а первая отклоняемая часть 52 второй несущей поверхности 50 отклонена задней кромкой вниз. В частных вариантах осуществления изобретения первая отклоняемая часть 52 может отклоняться только задней кромкой вниз, а вторая отклоняемая часть 44 может отклоняться только задней кромкой вверх. Отклонение второй отклоняемой части 44 вверх создает уменьшение подъемной силы, а отклонение первой отклоняемой части 52 вниз создает прирост подъемной силы. Эти уменьшение и прирост подъемной силы вызывают крен самолета 20 в направлении стрелки 32. Однако, поскольку вторая отклоняемая часть 44 меньше первой отклоняемой части 52, то для создания сопоставимого по величине и действующего в противоположном направлении приращения силы на соответствующей части первой несущей поверхности 40, вторая отклоняемая часть 44 должна отклоняться на значительно большую величину, чем первая отклоняемая часть 52. Такое увеличенное отклонение второй отклоняемой части 44 может привести к созданию отрицательной подъемной силы на соответствующей части первой несущей поверхности 40, что обеспечивает возможность уравновешивания путевого момента при совершении эволюции по крену.
На фиг.5 представлен график, иллюстрирующий зависимость между коэффициентом аэродинамического сопротивления и коэффициентом подъемной силы для несущей поверхности летательного аппарата, выполненного в соответствии с изобретением, такой как первая несущая поверхность 40 и вторая несущая поверхность 50 самолета 20. Когда вторая отклоняемая часть 44 и первая отклоняемая часть 52 находятся в неотклоненном положении, первая несущая поверхность 40 и вторая несущая поверхность 50 имеют примерно равные коэффициенты аэродинамического сопротивления и подъемной силы, как это представлено на графике точками 44U и 52U соответственно. Однако отклонение первой отклоняемой части 52 вниз, показанное на фиг.4, вызывает прирост коэффициента подъемной силы и обусловленный им прирост коэффициента аэродинамического сопротивления на соответствующей части второй несущей поверхности 50, как представлено на графике точкой 52DD. Этот прирост аэродинамического сопротивления стремится повернуть самолет 20 относительно его вертикальной оси влево, т.е. в направлении второй несущей поверхности 50. Однако в этом случае вторая отклоняемая часть 44 отклонена вверх настолько, что на соответствующей части первой несущей поверхности 40 создается отрицательная подъемная сила и обусловленный ей прирост аэродинамического сопротивления, как представлено на графике точкой 44DU. В частном варианте осуществления изобретения вторая отклоняемая часть 44 для создания отрицательной подъемной силы и обусловленного ей прироста аэродинамического сопротивления отклоняется вверх примерно на 10 градусов, а первая отклоняемая часть для создания прироста подъемной силы и обусловленного им прироста аэродинамического сопротивления отклоняется вниз примерно на 5 градусов. Благодаря приросту аэродинамического сопротивления, создаваемому отклонением второй отклоняемой части 44, возникает путевой момент, стремящийся повернуть самолет 20 в направлении первой несущей поверхности 40. Таким образом, правильно уравновешивая увеличение аэродинамического сопротивления, создаваемое отклонением первой отклоняемой части 52, и увеличение аэродинамического сопротивления, создаваемое отклонением второй отклоняемой части 44, с учетом различия между плечами их действия, можно достичь баланса самолета относительно вертикальной оси таким образом, что эволюция самолета 20 по крену не приведет к существенному изменению путевого момента.
Следует отметить, что остаточное боковое скольжение может быть близким к нулевому лишь для конкретного управляющего воздействия по крену при конкретном коэффициенте подъемной силы. Поэтому при проектировании летательного аппарата может быть предпочтительно выбирать эту точку так, чтобы она соответствовала эволюции с угловой скоростью крена, или близкой к ней, которая используется в режиме полета с малой эффективной поверхностью рассеяния (концепция "Стелс"), когда использование рулей направления или тормозных щитков ограничено или исключено. Любое другое сочетание угловой скорости крена и коэффициента подъемной силы будет являться компромиссом. При слишком малом управляющем воздействии по крену компенсация со стороны системы управления будет недостаточной, т.е. с наличием путевого момента, действующего против крена, а при слишком большом управляющем воздействии по крену компенсация со стороны системы управления будет избыточной, т.е. с наличием путевого момента, действующего по крену. Хотя и то, и другое нежелательно, в обоих случаях индуцированный кренением путевой момент все же должен быть меньше, чем действующий против крена путевой момент летательного аппарата без использования данного изобретения.
Кроме того, правильный выбор размеров второй отклоняемой части 44 может позволить за счет уменьшения подъемной силы, т.е., суммы уменьшающейся положительной подъемной силы и отрицательной подъемной силы, создаваемых отклонением второй отклоняемой части 44 вверх, компенсировать увеличение подъемной силы, создаваемое отклонением первой отклоняемой части 52 вниз. Таким образом, самолет 20 может совершать эволюцию по крену, не испытывая существенного изменения результирующей подъемной силы. Такое изменение, например, может быть примерно менее двух процентов. Следует отметить, что хотя увеличение подъемной силы, создаваемое отклонение первой отклоняемой части 52, способно уравновешивать уменьшение подъемной силы, создаваемое отклонением второй отклоняемой части 44, поперечный момент, создаваемый первой отклоняемой частью 52, вероятно, не будет равным поперечному моменту, создаваемому отклонением второй отклоняемой части 44, из-за того, что вторая отклоняемая часть 44 имеет большее плечо действия. Однако этот несимметричный поперечный момент не влияет на летные качества самолета 20, если корпус 30 достаточно прочен, чтобы его выдерживать.
На этапе проектирования летательного аппарата, определение того, настолько вторая отклоняемая часть 44 должна быть меньше первой отклоняемой части 52, может выполняться по схеме, рассматриваемой ниже. Сначала следует определить прирост подъемной силы на второй несущей поверхности 50, создаваемый при максимальном отклонении первой отклоняемой части 52 для конкретной расчетной скорости полета. Затем следует скорректировать угол отклонения для второй отклоняемой части 44 таким образом, чтобы участок первой - несущей поверхности 40, снабженный второй отклоняемой частью 44, создавал равнозначное уменьшение подъемной силы, т.е. сумму уменьшения положительной подъемной силы и отрицательной подъемной силы. Затем увеличение путевого момента, создаваемого приростом аэродинамического сопротивления при отклонении первой отклоняемой части 52, следует сравнить с увеличением путевого момента, создаваемого приростом аэродинамического сопротивления при отклонении второй отклоняемой части 44. Если увеличение путевого момента, обусловленное отклонением первой отклоняемой части 52 окажется больше сравниваемой с ним величины, значит величина отклонения второй отклоняемой части 44 на уменьшение подъемной силы недостаточна. Площадь второй отклоняемой части 44 следует уменьшить, чтобы, создавая такую же величину отрицательной подъемной силы, она могла отклоняться дальше. Затем процесс расчетов повторяют. Следует отметить, что первая отклоняемая часть 42 и вторая отклоняемая часть 54 будут примерно одинакового размера. Специалистам в данной области техники должна быть очевидна возможность использования других методик проектирования.
Корпус 30 самолета может быть выполнен в виде набора лонжеронов, стоек и подкосов, шпангоутов, сплошных профилей, полых профилей, поперечных перегородок, обшивки и/или любых других подходящих элементов конструкции. Кроме того, корпус 30 может быть выполнен из стали, алюминия, титана, композиционного материала и/или любого другого подходящего материала. Первая несущая поверхность 40 и вторая несущая поверхность 50 могут быть выполнены в виде набора лонжеронов, стоек и подкосов, нервюр, сплошных профилей, полых профилей, обшивки и/или любых других подходящих элементов конструкции. Кроме того, первая несущая поверхность 40 и вторая несущая поверхность 50 могут быть выполнены из стали, алюминия, титана, композиционного материала и/или любого другого подходящего материала. Следует отметить, что в частных случаях осуществления изобретения корпус 30 может являться частью первой несущей поверхности 40 и второй несущей поверхности 50, вместе составляющих планер самолета. Кроме того, для приведения в действие первой отклоняемой части 42, второй отклоняемой части 44, первой отклоняемой части 52 и второй отклоняемой части 54 могут использоваться любые из существующих силовых приводов, широко известных специалистам.
На фиг.6 представлен график, иллюстрирующий зависимость между путевым моментом и поперечным моментом по меньшей мере для некоторых вариантов выполнения летательного аппарата в соответствии с изобретением, таких как самолет 20, и демонстрирующий, по меньшей мере для этих вариантов, некоторые из достоинств настоящего изобретения. Сплошной линией на фиг.6 обозначена зависимость между путевым моментом и поперечным моментом для обычного летательного аппарата, такого как самолет 8, изображенный на фиг.1, а штриховой линией обозначена зависимость между путевым моментом и поперечным моментом по меньшей мере для некоторых вариантов выполнения летательного аппарата, выполненного в соответствии с изобретением, таких как самолет 20. Как следует из графика, для обычного самолета при создании минимального поперечного момента возникающий путевой момент минимален, но по мере роста поперечного момента путевой момент, действующий против крена, возрастает экспоненциально. Для самолета 20 при создании минимального поперечного момента возникающий путевой момент также минимален. В дальнейшем, как и в случае обычного летательного аппарата, умеренные движения крена порождают столь же умеренный путевой момент, действующий против крена. Этот действующий против крена путевой момент возникает потому, что меньшая отклоняемая часть, например вторая отклоняемая часть 44, для таких моментов крена либо отклонена в режиме создания отрицательной подъемной силы на очень малый угол, либо еще находится в режиме создания положительной подъемной силы. Однако, в отличие от обычного самолета, при дальнейшем увеличении поперечного момента путевой момент, действующий на самолет 20 против крена, начинает уменьшаться и фактически сводится к нулю. После достижения нулевого значения и при дальнейшем увеличении поперечного момента путевой момент начинает действовать по крену, т.е. смещает нос самолета в сторону крена.
Соответственно, на фиг.6 видно, что в широком диапазоне значений поперечного момента, путевой момент, создаваемый по меньшей мере некоторыми летательными аппаратами, выполненными в соответствии с настоящим изобретением, приблизительно равен путевому моменту, создаваемому обычным летательным аппаратом, или меньше его. Таким образом, в отношении летательных аппаратов, для которых малые или умеренные значения путевого момента не являются критичными, фиг.6 свидетельствует о возможности улучшения путевой устойчивости летательного аппарата в широком диапазоне характеристик эволюции по крену. Действительно, уравновешивание действующего против крена путевого момента происходит при совершении эволюции по крену с довольно высокой угловой скоростью. Соответственно, летательный аппарат можно спроектировать таким образом, чтобы он совершал эволюции с более высокими угловыми скоростями крена, когда путевой момент равен или близок к нулю для конкретного коэффициента подъемной силы. Таким образом, при совершении эволюции по крену с высокими угловыми скоростями крена возникающий путевой момент будет действовать против крена, если фактическая угловая скорость крена меньше расчетной, или по крену, если фактическая угловая скорость крена больше расчетной, но в обоих случаях значение путевого момента будет ниже, чем у обычного летательного аппарата. Поэтому использование этого решения дополнительно улучшит управляемость летательного аппарата.
В частных вариантах осуществления изобретения, расчетная точка (уравновешивания действующего против крена путевого момента) может выбираться для заданной угловой скорости крена, преимущественно используемой на режимах полета с уменьшенной эффективной поверхностью рассеяния, что подразумевает недопустимость открытия тормозных щитков. Как было отмечено выше, любое иное сочетание угловой скорости крена и коэффициента подъемной силы будет своего рода компромиссом. Управляющее воздействие по крену слишком малой интенсивности будет вызывать незначительный путевой момент, действующий против крена, а слишком большой интенсивности - незначительный момент, действующий по крену. Хотя нежелателен ни тот, ни другой вариант, оба варианта должны быть лучше, чем действующий против крена путевой момент, испытываемый обычным летательным аппаратом при маневрировании по крену.
Однако в отношении летательных аппаратов, для которых при совершении эволюции по крену допускается лишь очень незначительный путевой момент, могут потребоваться другие решения. Одним таким решением может быть использование максимального поперечного момента, при котором путевой момент равен нулю, каждый раз, когда требуется совершить эволюцию по крену. Еще одно решение поясняется фиг.7. На фиг.7 представлен график, иллюстрирующий ход отклонения отклоняемой части несущей поверхности, например второй отклоняемой части 44 первой несущей поверхности 40, при совершении эволюции по крену в соответствии с одним из вариантов осуществления изобретения. Как видно из графика, сначала отклоняемая поверхность отклоняется незначительно, после чего наступает циклический режим работы, в котором несущая поверхность отклоняется на величину, обеспечивающую создание отрицательной подъемной силы, и обратно в нейтральное положение несколько раз в секунду. Такой переходный режим может использоваться в диапазоне умеренных изменений углового положения, например, от нескольких градусов в положительном направлении до нескольких градусов в отрицательном. При наличии управляющего сигнала на достижение больших углов крена длительность пребывания отклоняемой несущей поверхности в режиме создания отрицательной подъемной силы во время отработки цикла становится все больше до тех пор, пока несущая поверхность не останется в этом режиме. При задании более глубокого крена аэродинамическая поверхность далее может отклоняться на еще больший угол в режиме создания отрицательной подъемной силы. Фиг.7 отражает поведение органа управления при медленном повороте штурвала с резким возвратом в его нейтральное положение после достижения заданного угла крена. Соответствующая отклоняемая часть несущей поверхности большего размера, например первая отклоняемая часть 52, может отклоняться в аналогичном порядке. Данный циклический режим нельзя использовать для обычных элеронов, так как часть цикла требуется на создание избыточной компенсации.
На фиг.8 представлен вид сверху еще одного самолета 60, выполненного в соответствии с настоящим изобретением. Как и самолет 20, самолет 60 содержит корпус 70, первую несущую поверхность 80 и вторую несущую поверхность 90, вместе образующие планер самолета. Первая несущая поверхность 80, которой может быть полукрыло, консоль стабилизатора или управляемая аэродинамическая поверхность любого другого типа, содержит первую отклоняемую часть 82, а вторая несущая поверхность 90, которой может быть полукрыло, консоль стабилизатора или управляемая аэродинамическая поверхность любого другого типа, содержит первую отклоняемую часть 92. Первая отклоняемая часть 82 и первая отклоняемая часть 92 могут быть выполнены в виде элеронов, закрылков, поверхностей изменяемого профиля или рулевых поверхностей любого другого типа, управляемых для создания прироста и/или уменьшения подъемной силы и аэродинамического сопротивления. Как показано на чертеже, первая отклоняемая часть 82 и первая отклоняемая часть 92 выполнены в виде элеронов, отклоняющихся вверх или вниз относительно задней кромки первой несущей поверхности 80 и второй несущей поверхности 90, соответственно. Помимо отклоняемой части, к первой несущей поверхности 80 подвижно крепится с возможностью поворота дополнительная аэродинамическая поверхность, в данном варианте - третья несущая поверхность 100. Аналогично, ко второй несущей поверхности 90 подвижно крепится с возможностью поворота дополнительная аэродинамическая поверхность, в данном варианте - четвертая несущая поверхность 110. Третья и четвертая несущие поверхности 100 и 110 могут быть цельноповоротными стабилизаторами, концевыми элеронами, скручивающимися адаптивными конструкциями крыла, поверхностями изменяемого профиля или рулевыми поверхностями любого другого типа, которыми можно управлять для создания отрицательной подъемной силы и прироста аэродинамического сопротивления. Как показано на чертеже, третья несущая поверхность 100 и четвертая несущая поверхность 110 являются участками крыла, поворачивающихся относительно осей 86 и 96 их лонжеронов, соответственно. Специалистам хорошо известны силовые приводы, поворачивающие третью несущую поверхность 100 и четвертую несущую поверхность 110. Как видно на чертеже, самолет 60, который может быть выполнен из конструкционных элементов и материалов, аналогичных используемым в конструкции самолета 20 на фиг.3, подобен самолету 20, за исключением того, что первая несущая поверхность 80 и вторая несущая поверхность 90 являются стреловидными, а вместо второй отклоняемой части 44 и второй отклоняемой части 54 используются третья несущая поверхность 100 и четвертая несущая поверхность 110 соответственно.
На фиг.9 представлен вид спереди самолета 60 с первой отклоняемой частью 92 второй несущей поверхности 90, отклоненной задней кромкой вниз, и третьей несущей поверхностью 100, отклоненной задней кромкой вверх, с созданием аэродинамического момента, поворачивающего самолет 60 по крену в направлении стрелки 72. Отклонение первой отклоняемой части 92 вниз создает прирост подъемной силы на соответствующем участке второй несущей поверхности 90, а отклонение третьей несущей поверхности 100 вверх создает отрицательную подъемную силу на соответствующем участке первой несущей поверхности 80. Этот прирост подъемной силы и уменьшение подъемной силы вызывают крен самолета 60 в направлении стрелки 72. Вместе с тем, отклонение первой отклоняемой части 92 вниз создает прирост аэродинамического сопротивления, обусловленный приростом подъемной силы, а отклонение третьей несущей поверхности 100 вверх создает прирост аэродинамического сопротивления, связанный с уменьшением подъемной силы. Прирост аэродинамического сопротивления на третьей несущей поверхности 100 связан с тем, что эту аэродинамическую поверхность из-за ее меньшей площади нужно отклонять на большой угол для достижения точки на кривой зависимости между подъемной силой и аэродинамическим сопротивлением, находящейся далеко от начала координат в области отрицательных значений. Тем самым может быть обеспечено взаимное уравновешивание увеличения путевого момента, создаваемого приростом аэродинамического сопротивления при отклонении первой отклоняемой части 92, и увеличения путевого момента, создаваемого приростом аэродинамического сопротивления при отклонении третьей несущей поверхности 100 с тем, чтобы по меньшей мере при одном конкретном типе эволюции самолета 60 по крену не возникало существенного изменения путевого момента. Следует отметить, что в отношении взаимосвязи характеристик движения по рысканию и по крену самолет 60 аналогичен самолету 20, показанному на фиг.6, и, соответственно, в самолете 60 можно использовать любые из рассмотренных выше способов контроля путевого момента при маневрировании по крену.
В частных вариантах осуществления изобретения может обеспечиваться равенство прироста подъемной силы, создаваемого отклонением первой отклоняемой части 92, и уменьшения подъемной силы, т.е. суммы уменьшения положительной подъемной силы и отрицательной подъемной силы, создаваемой отклонением третьей несущей поверхности 100. Таким образом, самолет 60 может совершать эволюции по крену, не испытывая существенного изменения результирующей подъемной силы.
Однако стреловидность первой несущей поверхности 80 и второй несущей поверхности 90 может привнести дополнительную проблему, связанную с маневрированием по крену - возникновение действующего на самолет 60 продольного момента. При совершении эволюции по крену может возникнуть продольный момент - вследствие того, что прирост подъемной силы на второй несущей поверхности 90 действует не на том же расстоянии за центром масс, что уменьшенная подъемная сила на третьей несущей поверхности 100. Для самолета 20, изображенного на фиг.3, эта проблема не столь актуальна, так как отклоняемые части первой несущей поверхности 40 и второй несущей поверхности 50 расположены на одинаковом расстоянии за центром масс.
Для самолета 60 эта проблема может быть решена выравниванием центра давления третьей несущей поверхности 100 и центра первой отклоняемой части 92 по горизонтали (относительно продольной оси самолета), чтобы они располагались на одном расстоянии за центром масс. Таким образом, прирост подъемной силы при отклонении первой отклоняемой части 92 выровнен по горизонтали - по меньшей мере приблизительно - с уменьшением подъемной силы при отклонении третьей несущей поверхности 100, благодаря чему как прирост, так и уменьшение подъемной силы действуют на одном и том же плече. При равенстве плеч относительно центра масс вдоль продольной оси, прирост и уменьшение подъемной силы можно регулировать таким образом, чтобы продольный момент существенно не изменялся. Аналогичным образом, центр давления четвертой несущей поверхности 110 может быть выровнен с центром первой отклоняемой части 82 первой несущей поверхности 80.
В рассмотренных выше вариантах осуществления изобретения предполагалось, что отклоняемые части несущих поверхностей, расположенные с одной стороны самолета, например первая отклоняемая часть 92 и четвертая несущая поверхность 110, действуют независимо друг от друга, т.е. когда отклоняемая часть приводится в действие, другая остается в нейтральном (неотклоненном положении). Так может быть не всегда. Например, отклонением на одной несущей поверхности внутренней отклоняемой части вниз и внешней отклоняемой части вверх можно создать путевой момент в чистом виде. Другой пример: приводя в действие сразу все четыре отклоняемые части, можно получить эффект воздушного тормоза.
На стадии проектирования, размер третьей несущей поверхности 100 зависит от формы и конфигурации второй несущей поверхности 90 и режима полета самолета 60. Вообще, размер третьей несущей поверхности 100 должен составлять от 20 до 80% размера участка второй несущей поверхности 90, находящегося под влиянием первой отклоняемой части 92. В случае полета на малой высоте с энергичным маневрированием все несущие поверхности, вероятно, будут работать в точке, находящейся сравнительно низко на кривой зависимости коэффициента аэродинамического сопротивления от коэффициента подъемной силы. В случае же полета на больших высотах и/или с большой полетной массой все несущие поверхности, вероятно, будут работать в точке, находящейся сравнительно высоко на указанной кривой. Соответственно, в режиме полета, находящемся низко на кривой зависимости коэффициента аэродинамического сопротивления от коэффициента подъемной силы, третью несущую поверхность 100 не требуется отклонять на значительно больший угол, чем первую отклоняемую часть 92, для входа в режим отрицательной подъемной силы, и, как следствие, площадь третьей несущей поверхности 100 будет ближе к площади участка второй несущей поверхности 90, находящегося под влиянием первой отклоняемой части 92, возможно - в интервале 60-80%. В предельном случае, когда самолет 60 летит без подъемной силы, третья несущая поверхность 100 и участок второй несущей поверхности 90, находящийся под влиянием первой отклоняемой части 92, могут быть одинакового размера, и коэффициенты усиления в канале управления отклонением этих поверхностей также могут быть примерно одинаковыми. Однако в режиме полета, находящемся высоко на кривой зависимости коэффициента аэродинамического сопротивления от коэффициента подъемной силы, третья несущая поверхность 100 должна отклоняться в режиме отрицательной подъемной силы на большой угол для создания уравновешивающего путевого момента, и, как следствие, площадь третьей несущей поверхности 100 будет значительно меньше площади участка второй несущей поверхности 90, находящегося под влиянием первой отклоняемой части 92, возможно в интервале 20-40%. Размер четвертой несущей поверхности 110 может выбираться аналогично.
Возможность контроля путевого момента во время движения крена подсказывает, что должен существовать способ управления летательным аппаратом только в путевом канале. Это было бы желательно, например, при посадке с боковым ветром. Одним подходом к путевому управлению быть приведение в действие управляющих поверхностей с одной стороны летательного аппарата, таких как первая отклоняемая часть 82 и третья несущая поверхность 100 самолета 60, одновременно, но в противоположных направлениях. Например, отклонение первой отклоняемой части 82 вниз создает прирост подъемной силы и обусловленный им прирост аэродинамического сопротивления на соответствующем участке первой несущей поверхности 80, а отклонение третьей несущей поверхности 100 задней кромкой вверх создает отрицательную подъемную силу и обусловленный ей прирост аэродинамического сопротивления на этом участке первой несущей поверхности 80. Однако, поскольку отклоняемые части аэродинамической поверхности расположены на левой стороне самолета 60, аэродинамическое сопротивление, создаваемое обеими частями, вызывает путевой момент, действующий в направлении первой несущей поверхности 80. Путем соответствующего проектирования аэродинамических поверхностей, аналогично рассмотренному выше, можно обеспечить путевую управляемость за счет отклонения отклоняемых частей без существенного изменения результирующей подъемной силы, поперечного момента и продольного момента. Однако коэффициенты усиления при отклонении управляющих поверхностей должны отличаться от используемых при управлении летательным аппаратом по крену. Это усложняет программные средства управления, но безусловно позволяет обойтись без дополнительных отклоняемых частей несущих поверхностей. Следует отметить, что если при совершении эволюции по крену в соответствии с определенными вариантами осуществления изобретения соответствующие несущие поверхности создают несимметричные моменты крена при уравновешивании моментов рыскания, то теперь ситуация меняется на противоположную - поперечный момент и продольный момент должны уравновешиваться, а несимметричными являются моменты рыскания, создаваемые соответствующими несущими поверхностями. Также необходимо отметить, что создание силы аэродинамического сопротивления с одной или обеих сторон летательного аппарата не выведет летательный аппарат на грань срыва потока с концевых частей несущих поверхностей (концевых элеронов крыла), поскольку передние кромки концевых частей перемещаются вниз. Таким образом, по углу установки они будут находиться в положении ниже нейтрального; то есть, концевые части никогда не создают положительного прироста подъемной силы.
Хотя изобретение было описано на примере самолета типа "летающее крыло", не имеющего рулей направления или тормозных щитков, такого как самолеты 20 и 60, оно может найти применение в других летательных аппаратах, для которых важно обеспечение малозаметности, например, в существующих самолетах типа "летающее крыло", у которых имеются разрезные закрылки, но их использование нежелательно, по меньшей мере в определенных ситуациях. Кроме того, данное изобретение может найти применение и во многих других летательных аппаратах, например самолетах с хвостовым оперением, управляемых ракетах или в летательных аппаратах любого другого типа, где путевую управляемость необходимо обеспечивать без использования вертикальной аэродинамической поверхности или разрезных закрылков.
Хотя выше было рассмотрено несколько вариантов настоящего изобретения, для специалиста в данной области техники должна быть очевидна возможность осуществления изобретения с разного рода дополнениями, исключениями, заменами и/или изменениями, не выходя при этом за рамки патентных притязаний. Поэтому предполагается, что такие дополнения, исключения, замены и/или видоизменения подпадают под патентные притязания, определяемые прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНЫЙ САМОЛЕТ "САМОЛЕТ В.С.ГРИГОРЧУКА" | 1995 |
|
RU2086478C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАКРЫЛКАМИ КРЫЛЬЕВ И ГОРИЗОНТАЛЬНЫМ ОПЕРЕНИЕМ ГИБРИДНОГО ВЕРТОЛЕТА | 2013 |
|
RU2551830C2 |
| СПОСОБ УПРАВЛЕНИЯ ЗАКРЫЛКАМИ КРЫЛЬЕВ И ГОРИЗОНТАЛЬНЫМ ОПЕРЕНИЕМ ГИБРИДНОГО ВЕРТОЛЕТА | 2013 |
|
RU2551703C2 |
| ЛЕГКИЙ МНОГОРЕЖИМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2007 |
|
RU2348568C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ ПИЛОТАЖНЫЙ САМОЛЕТ ЯК-54 | 2001 |
|
RU2177895C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СВАЛИВАНИЯ | 2017 |
|
RU2653414C1 |
| ТЕЙЛСИТТЕР | 2019 |
|
RU2775027C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С КРЫЛОМ-СТАБИЛИЗАТОРОМ | 2020 |
|
RU2743306C1 |
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2666093C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2007 |
|
RU2328391C1 |
Группа изобретений относится к области авиации. Система управления летательным аппаратом включает в себя корпус летательного аппарата, первую и вторую несущие поверхности. По меньшей мере часть первой и второй несущих поверхностей имеет возможность управляемого отклонения с тем, чтобы при совершении эволюции по крену первая несущая поверхность создавала прирост подъемной силы и обусловленный им прирост аэродинамического сопротивления, а вторая несущая поверхность - отрицательную подъемную силу и обусловленный ей прирост аэродинамического сопротивления. При этом прирост подъемной силы и уменьшение подъемной силы создают поперечный момент, а прирост аэродинамического сопротивления на второй несущей поверхности создает путевой момент, уравновешивающий путевой момент, создаваемый приростом аэродинамического сопротивления на первой несущей поверхности. Сила аэродинамического сопротивления на опускающемся полукрыле может уравновешивать силу аэродинамического сопротивления на поднимающемся полукрыле благодаря уменьшению площади аэродинамической поверхности, создающей направленную вниз силу. Вследствие этого данную поверхность приходится отклонять на величину, не только уменьшающую положительную подъемную силу, но и действительно создающую отрицательную подъемную силу. Таким образом, группа изобретений позволяет осуществлять кренение летательного аппарата, не сопровождающееся существенным изменением путевого момента летательного аппарата. 3 н. и 32 з.п. ф-лы, 9 ил.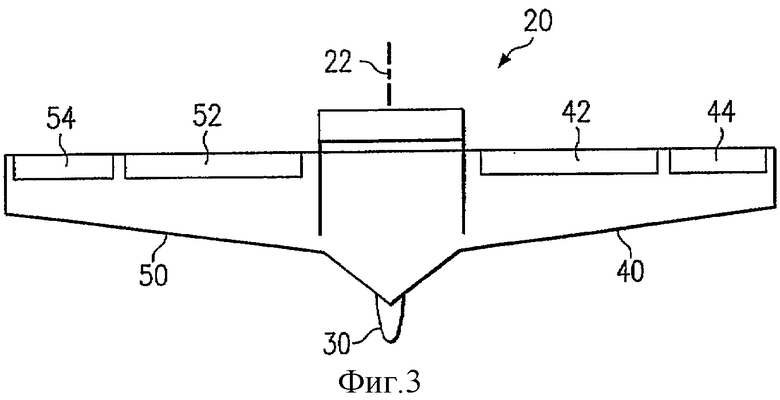
| US 4146200 A, 27.03.1979 | |||
| Устройство для волочения биметаллической проволоки | 1980 |
|
SU899190A1 |
| ФОНЕНДОСКОП-СТЕТОСКОП ЭЛЕКТРОННЫЙ | 1997 |
|
RU2173538C2 |
| RU 94022712 A1, 27.08.1996. | |||

