Настоящие варианты осуществления относятся к винтокрылому летательному аппарату, а более конкретно, к винтокрылому летательному аппарату по меньшей мере с одним несущим винтом и крылом-стабилизатором, в соответствии с чем, крыло-стабилизатор имеет форму в плане, которая уменьшает неустойчивые аэродинамические нагрузки, вызванные на нем спутной струей по меньшей мере одного несущего винта.
Винтокрылый летательный аппарат обычно оборудуется одним или более крыльями, которые помогают улучшать устойчивость и управляемость винтокрылым летательным аппаратом во время полета. Следовательно, такие крылья иногда также называются горизонтальными стабилизаторами, горизонтальными крыльями-стабилизаторами или крыльями-стабилизаторами.
Традиционно, вертолеты имеют одно или более крыльев-стабилизаторов, размещенных на заднем конце хвостового оперения. В некоторых моделях крылья-стабилизаторы выступают из задней части хвостовой балки или из киля. В других моделях единственное крыло-стабилизатор размещается на вершине киля. Последняя конфигурация, в которой единственное крыло-стабилизатор размещается на вершине киля, иногда также называется T-образным хвостовым оперением.
Вследствие местоположения крыльев-стабилизаторов в хвостовой области винтокрылого летательного аппарата они типично подвергаются воздействию структур воздушных потоков, создаваемых по меньшей мере одним несущим винтом. Эти структуры воздушных потоков, которые иногда также называются спутной струей или спутной струей несущего винта, взаимодействуют с крыльями-стабилизаторами и определяют аэродинамическую нагрузку на крылья-стабилизаторы.
Сила взаимодействия между спутной струей несущего винта и крылом-стабилизатором зависит от позиционирования крыла-стабилизатора относительно винта и от состояния полета (например, во время взлета и приземления или во время горизонтального полета). Однако, формирование аэродинамических нагрузок на крыле-стабилизаторе, которые являются значительными для определения конструкционного размера крыла-стабилизатора, может обычно не предотвращаться.
Крыло-стабилизатор формирует некоторую величину статической аэродинамической нагрузки преднамеренно (например, чтобы улучшать устойчивость и управляемость винтокрылого летательного аппарата во время полета). Однако, нежелательные неустойчивые аэродинамические нагрузки также получаются в результате взаимодействия спутной струи несущего винта с крылом-стабилизатором.
Эти неустойчивые аэродинамические нагрузки могут иногда достигать значительных амплитуд, которые могут вести к усталостным разрушениям крыла-стабилизатора. Следовательно, особое внимание во время разработки крыла-стабилизатора часто требуется, чтобы гарантировать расчет конструкции, который в значительной степени снижает риск усталостных разрушений, вызванных нежелательными неустойчивыми аэродинамическими нагрузками.
Проблема часто усугубляется фактом того, что одна из динамических собственных частот колебаний крыла-стабилизатора и хвостовой балки является близкой к частоте возбуждения спутной струи несущего винта. Такие условия резонанса между спутной струей несущего винта и крылом-стабилизатором могут быть предотвращены посредством увеличения либо жесткости конструкции, либо массы крыла-стабилизатора.
Однако, увеличение жесткости конструкции или массы крыла-стабилизатора добавляет веса в чувствительной области винтокрылого летательного аппарата, поскольку это смещает центр тяжести дальше назад. Особенно, когда крыло-стабилизатор размещается на киле, структурные и динамические проблемы являются трудно решаемыми. В результате, крылья-стабилизаторы редко размещаются на киле, что в ином случае было бы очень полезным для качества управляемости и эксплуатационных качеств.
Вместо этого, большинство традиционных решений размещают крыло-стабилизатор в позиции, которая находится в вертикальном направлении ниже плоскости несущего винта (например, на хвостовой балке). В результате, взаимодействие между спутной струей несущего винта и крылом-стабилизатором, главным образом, возникает при более низких скоростях полета. Поскольку воздушные нагрузки увеличиваются со скоростью полета, взаимодействие между спутной струей несущего винта и крылом-стабилизатором при более низких скоростях полета формирует сравнительно умеренные неустойчивые аэродинамические нагрузки, в то время как статическая воздушная нагрузка на крыло-стабилизатор является сравнительно низкой. Таким образом, поскольку конструкция крыла-стабилизатора подвергается наложению статической воздушной нагрузки и неустойчивых аэродинамических нагрузок, конструкция крыла-стабилизатора не достигает своих усталостных пределов при более низких скоростях полета.
При высоких скоростях полета спутная струя несущего винта изменяет свою траекторию и проходит над низко расположенным крылом-стабилизатором (т.е., крылом-стабилизатором, которое располагается на хвостовой балке, например). Таким образом, даже если статическая воздушная нагрузка на крыло-стабилизатор является большей при высоких скоростях полета по сравнению с низкими скоростями полета, сравнительно небольшая амплитуда неустойчивых аэродинамических нагрузок низко расположенного крыла-стабилизатора имеет эффект того, что суммарная воздушная нагрузка остается хорошей в диапазоне пределов усталости.
Однако, низко расположенное крыло-стабилизатор проявляет сниженные качества управляемости и эксплуатационные качества по сравнению с высоко расположенным крылом-стабилизатором (например, крылом-стабилизатором на вершине киля). Например, во время зависания и/или при низкой скорости полета низко расположенное крыло-стабилизатор лежит в струе несущего винта и формирует усилие, направленное к земле, которое иногда также называется прижимающим усилием. Это прижимающее усилие вынуждает винтокрылый летательный аппарат задирать носовую область, что иногда также называется кабрированием.
Кабрирование может резко снижать обзор пилота в направлении земли. Кабрирование дополнительно формирует относительно высокое механическое напряжение на колонке несущего винта. Кроме того, прижимающее усилие может значительно снижать полезную нагрузку винтокрылого летательного аппарата. В качестве примера, прижимающее усилие может уменьшать полезную нагрузку вертолета в классе три-четыре тонны на величину, которая является эквивалентной одному пассажиру.
Кроме того, низко расположенное крыло-стабилизатор обычно должно быть установлено на хвостовой балке. Это ведет к более короткому плечу рычага и, тем самым, к уменьшенному стабилизирующему эффекту по сравнению с высоко расположенным крылом-стабилизатором.
Некоторые производители вертолетов пытаются преодолеть дилемму между управляемостью и эксплуатационными характеристиками, с одной стороны, и устойчивостью полета, с другой стороны, применяя высоко расположенное крыло-стабилизатор. Однако, как упомянуто выше, эти высоко расположенные крылья-стабилизаторы сталкиваются с проблемой сильных неустойчивых аэродинамических нагрузок, вызванных взаимодействием со спутной струей несущего винта в крейсерском полете.
Поскольку неустойчивые аэродинамические нагрузки ставят серьезные конструктивные проблемы, относительно небольшое число вертолетов, спроектированных на сегодняшний день, отличаются высоко расположенным крылом-стабилизатором. Часто вертолеты с высоко расположенными крыльями-стабилизаторами включают в себя дополнительное средство для уменьшения неустойчивых аэродинамических нагрузок. Среди таких средств существует сужение крыльев-стабилизаторов (т.е., крыло-стабилизатор имеет длину хорды, которая длиннее в корневой части по сравнению с концами) или включение конструктивных усилений. Эти усиления типично состоят из утолщения крыла-стабилизатора в его соединении с хвостовой балкой или килем или установки подпорок, которые внешне поддерживают крыло-стабилизатор.
Например, усовершенствованный вертолет огневой поддержки AV-02 Hughes YAH-64 имеет T-образное хвостовое оперение (т.е., крыло-стабилизатор на киле) со стреловидностью (т.е., крыло-стабилизатор располагается под углом назад от коревой части к концам) и сужением. Agusta-Bell BA609 отличается T-образным хвостовым оперением с сужением, в результате чего, крыло-стабилизатор имеет прямую переднюю и заднюю кромки. RAH-66 Comanche имеет T-образное хвостовое оперение с прямым крылом-стабилизатором (т.е., крыло-стабилизатор на вершине киля с прямой передней и задней кромками, но без стреловидности). Kamov Ka-60 имеет T-образное хвостовое оперение с прямым крылом-стабилизатором и подпорками к килю.
Обе меры, сужение крыла-стабилизатора и усиления, являются неблагоприятными с аэродинамической точки зрения, поскольку они увеличивают лобовое сопротивление, уменьшают эффективность крыла-стабилизатора и уменьшают диапазон состояний полета, в которых крыло-стабилизатор имеет способность стабилизировать винтокрылый летательный аппарат.
Документ EP 2 899 118 A1 описывает винтокрылый летательный аппарат с фюзеляжем и по меньшей мере одним несущим винтом, упомянутый по меньшей мере один несущий винт является приводимым в действие для управления ассоциированным углом тангажа упомянутого винтокрылого летательного аппарата в действии, и упомянутый фюзеляж оборудуется по меньшей мере одним пассивным аэродинамическим устройством типа крыла, которое приспосабливается для формирования независимо от упомянутого ассоциированного угла тангажа подъемной силы, действующей на упомянутый фюзеляж, упомянутая подъемная сила ориентируется перпендикулярно воздушному потоку, который направляется при эксплуатации упомянутого винтокрылого летательного аппарата против упомянутого пассивного аэродинамического устройства типа крыла. Винтокрылый летательный аппарат дополнительно содержит киль с рулем направления и хвостовым крылом в форме T-образного хвостового оперения, предусмотренным на хвостовой балке фюзеляжа. Хвостовое крыло может быть регулируемым по своему наклону и действовать в качестве дополнительной подъемной поверхности.
Документ CN 103 979 105 A описывает летательный аппарат с крылом изменяемой геометрии с вертикальным типом взлета и приземления. Летательный аппарат с крылом изменяемой геометрии с вертикальным типом взлета и приземления содержит корпус летательного аппарата, основное крыло, левое крыло и правое крыло, при этом основное крыло размещается в нижней части корпуса летательного аппарата; левое крыло и правое крыло соответственно присоединяются к двум концам основного крыла; втулка вала для поворота левого крыла и втулка вала для поворота правого крыла устанавливаются в основном крыле; один комплект из вала поворота левого крыла во втулке вала для поворота левого крыла размещается в левом крыле; один комплект из вала для поворота правого крыла во втулке вала для поворота правого крыла размещается на правом крыле; механизм рулевого управления левого крыла и механизм рулевого управления правого крыла также размещаются в основном крыле; механизм рулевого управления левого крыла используется для приведения в действие вала поворота левого крыла, чтобы регулировать направление левого крыла; механизм рулевого управления правого крыла используется для приведения в действие вала поворота правого крыла, чтобы регулировать направление правого крыла. Летательный аппарат с крылом изменяемой геометрии с вертикальным типом взлета и приземления является приспособленным для реализации вертикального взлета и приземления модели самолета и беспилотного летательного аппарата, быстрой реализации различных состояний полета и эффективного торможения и движения назад в полете.
Документ EP 2 666 719 B1 описывает летательный аппарат, который включает в себя фюзеляж по меньшей мере один несущий винт, снабженный множеством лопастей по меньшей мере толкающий винт с переменным шагом винта по меньшей мере один аэродинамический профиль и по меньшей мере один мотор, приводящий во вращение несущий винт и каждый толкающий винт. Аэродинамический профиль может содержать два полукрыла, расположенных с обеих сторон фюзеляжа, и по меньшей мере один горизонтальный стабилизатор, расположенный на одном конце летательного аппарата и снабженный по меньшей мере одной подвижной поверхностью.
Документ WO 1999/067130 A1 описывает горизонтальный стабилизатор, определяющий первый и второй узлы, расположенные по размаху крыла, при этом первый узел, расположенный по размаху крыла, определяет первый угол наклона, а второй узел, расположенный по размаху крыла, определяет второй угол наклона, при этом угол наклона отличается от одного узла к другому, например, один больше другого. Горизонтальный стабилизатор функционирует, чтобы благоприятно влиять на распределение подъемной силы по размаху крыла, чтобы уменьшать изгибающие моменты около его монтажной поверхности. Различные варианты осуществления горизонтального стабилизатора включают в себя использование вертикально протягивающихся выступов вдоль задней кромки горизонтального стабилизатора, ступенчатого перехода, чтобы резко изменять угол наклона от одного узла к другому, и распределенное скручивание, которое постепенно изменяет угол наклона.
Документ EP 0 254 605 A1 описывает направленное и стабилизирующее устройство, которое содержит туннельный хвостовой винт, приводимый во вращение в поперечном шве, сформированном в обтекателе, наклоненном по отношению к вертикали на угол между 0° и 45°. Он также включает в себя "направленное внутрь V-образное" хвостовое оперение, присоединенное к вершине кожуха, и две аэродинамических поверхности, протягивающихся ассиметрично относительно вертикальной плоскости, проходящей через вершину обтекателя. Аэродинамические поверхности являются наклоненными в диапазонах углов между 0° и 45°.
Документ US 3,464,650 A описывает летательный аппарат с винтом/крылом с закрылками для выполнения вертикального и укороченного взлета и приземления (V/STOL). На вершине вертикального хвостового оперения летательный аппарат имеет горизонтальный стабилизатор, который может иметь полностью подвижный тип или иметь отдельно подвижные фрагменты. Эти отдельные фрагменты будут действовать как традиционные рули высоты или могут быть соединены, чтобы функционировать в качестве элеронов для управления креном в полете вперед способом двойной функции подъемных поверхностей. Органы управления традиционного летательного аппарата используются, чтобы задействовать горизонтальный стабилизатор, и руль направления на вертикальном хвостовом оперении, для управления в полете вперед.
Другие крылья-стабилизаторы для примера описываются в документах CN 106 516 082 A, US 2016/0031554 A1, WO 2005/005250 A2, US 5,738,301 A и US 3,902,688 A. Эти документы, соответственно, описывают крылья-стабилизаторы в винтокрылом летательном аппарате, которые являются по меньшей мере похожими на вышеописанные крылья-стабилизаторы. Документы EP2409917 и WO2009155584 были процитированы.
Вкратце, взаимодействие между спутной струей несущего винта и горизонтальными крыльями-стабилизаторами в винтокрылых летательных аппаратах зависит от режима полета (т.е., зависание, полет вперед с низкой или высокой скоростью) и размещения крыла-стабилизатора на винтокрылом летательном аппарате (т.е., низко расположено или высоко расположено), что имеет влияние на управляемость, эксплуатационные качества и устойчивость полета. Высоко расположенные крылья-стабилизаторы обеспечивают лучшую управляемость, эксплуатационные качества и устойчивость полета по сравнению с низко расположенными крыльями-стабилизаторами. Однако, как упомянуто выше, высоко расположенные крылья-стабилизаторы сталкиваются с проблемой сильных неустойчивых аэродинамических нагрузок, вызванных взаимодействием со спутной струей несущего винта в крейсерском полете.
Следовательно, целью является предоставление винтокрылого летательного аппарата с фюзеляжем по меньшей мере одним несущим винтом и крылом-стабилизатором. Крыло-стабилизатор должно снижать неустойчивые аэродинамические нагрузки, вызванные взаимодействием со спутной струей несущего винта по меньшей мере одного несущего винта, в то же время обеспечивая улучшенную управляемость, эксплуатационные качества и устойчивость полета по сравнению с традиционными крыльями-стабилизаторами.
Эти цели решаются посредством винтокрылого летательного аппарата, который содержит отличительные признаки по пункту 1 формулы изобретения. Более конкретно, винтокрылый летательный аппарат может содержать фюзеляж, имеющий центральную линию по меньшей мере один несущий винт, который создает завихрения во время работы, и крыло-стабилизатор, которое соединяется с фюзеляжем. Крыло-стабилизатор снабжается левым концом крыла, правым концом крыла, линией четвертей хорд с ненулевой кривизной, так что взаимодействие между завихрениями, создаваемыми по меньшей мере одним несущим винтом, и линией четвертей хорд распределяется по времени, передней кромкой, которая является дугообразной, и задней кромкой, которая является дугообразной.
Преимущественно, в винтокрылом летательном аппарате по меньшей мере с одним несущим винтом вышеописанное крыло-стабилизатор с линией четвертей хорд, имеющей ненулевую кривизну, ведет к уменьшенным неустойчивым аэродинамическим нагрузкам, вызванным спутной струей по меньшей мере одного несущего винта на крыло-стабилизатор. Такие крылья-стабилизаторы могут быть использованы на любом винтокрылом летательном аппарате по меньшей мере с одним несущим винтом, включающем в себя летательный аппарат с вертикальным взлетом и посадкой, мультикоптеры, вертолеты, дроны и т.д.
Крыло-стабилизатор имеет отдельную форму в плане (т.е., отдельную форму, когда рассматривается сверху). Отдельная форма в плане крыла-стабилизатора уменьшает неустойчивые нагрузки, создаваемые посредством взаимодействия со спутной струей несущего винта по меньшей мере одного несущего винта. В противоположность существующим формам в плане крыла-стабилизатора, которые, главным образом, являются прямоугольными или состоят из двух трапеций, предлагается форма в плане, в которой передняя и задняя кромки отличаются кривизной.
Соответственно, линия четвертей хорд крыла-стабилизатора является изогнутой. Другими словами, линия, которая соединяет все точки, которые располагаются в четверти длины хорды, которая является расстоянием от передней до задней кромки крыла-стабилизатора вдоль хорды, от передней кромки, является изогнутой. Наличие изогнутой линии четвертей хорд преимущественно изменяет реакцию крыла-стабилизатора на колебания спутной струи несущего винта по сравнению с крыльями стабилизатора с прямой линией четвертей хорд.
Фактически, спутная струя несущего винта проявляет регулярную структуру воздушного потока в крейсерском полете, и эта структура определяет временную последовательность состояний нагрузки на крыле-стабилизаторе. Изогнутая линия четвертей хорд изменяет отношение между крылом-стабилизатором и структурой протекания спутной струи несущего винта, уменьшая амплитуду неустойчивых нагрузок. Таким образом, крыло-стабилизатор становится менее восприимчивым к кратковременным состояниям нагрузки типа, который создает высокое механическое напряжение в месте соединения крыла-стабилизатора с винтокрылым летательным аппаратом (например, на хвостовой балке или киле), где крыло-стабилизатор является конструктивно чувствительным. В частности, мгновенные колебания крыла-стабилизатора вокруг продольной оси винтокрылого летательного аппарата извлекают пользу из уменьшенного взаимодействия между спутной струей несущего винта и крылом-стабилизатором, поскольку эти мгновенные колебания являются наиболее критичными для места соединения крыла-стабилизатора с винтокрылым летательным аппаратом с конструктивной точки зрения.
Поскольку предложенная новая форма в плане крыла-стабилизатора значительно снижает неустойчивые нагрузки аэродинамического происхождения в месте присоединения крыла-стабилизатора, крепежная арматура крыла-стабилизатора может быть спроектирована более экономичной по весу, и более экономичной по пространству (т.е., с менее потенциально негативным влиянием на аэродинамическую форму области взаимосвязывания между крылом-стабилизатором и хвостовой балкой или килем) по сравнению с крепежными арматурами традиционных крыльев-стабилизаторов.
Значительная экономия веса может быть достигнута благодаря уменьшенным неустойчивым аэродинамическим нагрузкам. В качестве примера, крыло-стабилизатор может требовать меньше конструктивных усилений. В качестве другого примера, прочность и вес конструкций, к которым крыло-стабилизатор присоединяется (например, хвостовой балки или киля), и которым крыло-стабилизатор передает неустойчивые аэродинамические нагрузки, также могут быть конструктивно уменьшены.
Киль винтокрылого летательного аппарата часто является конструктивно слабым компонентом. Следовательно, крыло-стабилизатор с изогнутой линией четвертей хорд, которая значительно снижает неустойчивые нагрузки, вызванные спутной струей несущего винта, является особенно полезным, когда установлено на киль. В действительности, аэродинамическое взаимодействие между спутной струей несущего винта и крылом-стабилизатором происходит при высокой скорости, и неустойчивые нагрузки на крыле-стабилизаторе обычно достигают наивысших амплитуд, когда крыло-стабилизатор установлено на киле.
Кроме того, время подвергания крыла-стабилизатора этим высоким неустойчивым нагрузкам, вызванным спутной струей несущего винта, составляет большую долю рабочего времени винтокрылого летательного аппарата. Большое расстояние между крылом-стабилизатором и фюзеляжем превращает узел крепления киля в место соединения, которое реагирует большими отклонениями на нагрузки крыла-стабилизатора и проявляет низкую собственную частоту колебаний, которую трудно корректировать при необходимости с точки зрения динамики конструкций.
Крыло-стабилизатор с кривой линией четвертей хорд может добиваться имеющей решающее значение величины уменьшения неустойчивой нагрузки, которая является необходимой для реализации в ином случае затруднительной конструкции установленного на киль крыла-стабилизатора. Несколько важных преимуществ для качества управляемости и эксплуатационных качеств могут быть реализованы, если крыло-стабилизатор с изогнутой линией четвертей хорд устанавливается на киль, как детализировано в недостатках предшествующего уровня техники.
Согласно одному аспекту, фюзеляж продолжается в продольном направлении между носовой областью и хвостовой областью, и линия четвертей хорд крыла-стабилизатора находится ближе к хвостовой области по меньшей мере на одном из левого и правого концов крыла, чем центральная линия фюзеляжа.
Согласно одному аспекту, фюзеляж продолжается в продольном направлении между носовой областью и хвостовой областью, и линия четвертей хорд крыла-стабилизатора находится ближе к носовой области по меньшей мере на одном из левого и правого концов крыла чем центральная линия фюзеляжа.
Согласно одному аспекту, абсолютное значение ненулевой кривизны линии четвертей хорд больше 0,2.
Согласно одному аспекту, абсолютное значение ненулевой кривизны линии четвертей хорд меньше 4.
Согласно одному аспекту, ненулевая кривизна линии четвертей хорд изменяется от первого значения на первом расстоянии от центральной линии фюзеляжа до второго значения на втором расстоянии от центральной линии фюзеляжа, так что ненулевая кривизна линии четвертей хорд является непостоянной между первым и вторым расстоянием от центральной линии фюзеляжа.
Согласно одному аспекту, крыло-стабилизатор имеет полукрыло, протягивающееся между центральной линией и концом крыла из левого и правого концов крыла, при этом первая, вторая, третья и четвертая точки располагаются на линии четвертей хорд на первом, втором, третьем и четвертом расстояниях от центральной линии фюзеляжа, соответственно, при этом первое, второе, третье и четвертое расстояния составляют 10%, 30%, 50% и 70% размаха полукрыла, соответственно, при этом ненулевая кривизна линии четвертей хорд является ненулевой между первой и четвертой точками, и при этом прямая линия между первой и четвертой точками имеет пятое расстояние от линии четвертей хорд между второй и третьей точками, которое больше 2% размаха полукрыла.
Согласно одному аспекту, линия четвертей хорд является симметричной центральной линии фюзеляжа.
Согласно одному аспекту, крыло-стабилизатор устанавливается по меньшей мере на одно из фюзеляжа, хвостовой балки, которая присоединяется к фюзеляжу, или вертикального киля, который присоединяется к хвостовой балке.
Согласно одному аспекту, крыло-стабилизатор имеет постоянную длину хорды между левым и правым концами крыла для крыла-стабилизатора.
Согласно одному аспекту, крыло-стабилизатор имеет длину хорды, которая уменьшается от центральной линии фюзеляжа к левому и правому концам крыла для крыла-стабилизатора.
Согласно одному аспекту, крыло-стабилизатор дополнительно содержит левое полукрыло, имеющее первую стреловидность, и правое полукрыло, имеющее вторую стреловидность, которая отличается от первой стреловидности.
Согласно одному аспекту, левое полукрыло имеет линию четвертей хорд с первой кривизной, правое полукрыло имеет линию четвертей хорд со второй кривизной, и вторая кривизна отличается от первой кривизны.
Согласно одному аспекту, левое полукрыло имеет первую длину, а правое полукрыло имеет вторую длину, которая отличается от первой длины.
Согласно одному аспекту, крыло-стабилизатор дополнительно содержит концевые аэродинамические поверхности.
Согласно одному аспекту, винтокрылый летательный аппарат может быть осуществлен как вертолет.
Варианты осуществления кратко излагаются в качестве примера в последующем описании со ссылкой на присоединенные чертежи. На этих присоединенных чертежах идентичные или идентично функционирующие компоненты и элементы могут быть обозначены идентичными ссылочными номерами и символами и, следовательно, описываются только один раз в последующем описании.
- Фиг. 1A является схемой иллюстративного винтокрылого летательного аппарата с крылом-стабилизатором в соответствии с некоторыми вариантами осуществления,
- Фиг. 1B является упрощенным видом сбоку иллюстративного винтокрылого летательного аппарата в соответствии с некоторыми вариантами осуществления,
- Фиг. 1C является упрощенным видом сверху иллюстративного винтокрылого летательного аппарата в соответствии с некоторыми вариантами осуществления,
- Фиг. 2 является схемой иллюстративного крыла-стабилизатора, имеющего линию четвертей хорд с ненулевой кривизной в соответствии с некоторыми вариантами осуществления,
- Фиг. 3A является схемой иллюстративного взаимодействия между центральной линией концевого завихрения лопасти несущего винта, достигающей линии четвертей хорд с ненулевой кривизной левой половины крыла-стабилизатора в соответствии с некоторыми вариантами осуществления,
- Фиг. 3B является схемой иллюстративного взаимодействия между центральной линией концевого завихрения лопасти несущего винта, проходящей через линию четвертей хорд с ненулевой кривизной левой половины крыла-стабилизатора в соответствии с некоторыми вариантами осуществления,
- Фиг. 3C является схемой иллюстративного взаимодействия между центральной линией концевого завихрения лопасти несущего винта, достигающей пересечения линии четвертей хорд с ненулевой кривизной крыла-стабилизатора и центральной линии фюзеляжа в соответствии с некоторыми вариантами осуществления,
- Фиг. 4 является схемой последовательности центральных линий концевого завихрения лопасти несущего винта, достигающих иллюстративного крыла-стабилизатора, имеющего постоянную длину хорды и линию четвертей хорд с ненулевой кривизной в соответствии с некоторыми вариантами осуществления,
- Фиг. 5 является схемой последовательности центральных линий концевого завихрения лопасти несущего винта, достигающих иллюстративного крыла-стабилизатора, имеющего ассиметричный изгиб между левым и правым полукрыльями в соответствии с некоторыми вариантами осуществления, и
- Фиг. 6 является схемой иллюстративного крыла-стабилизатора, имеющего сужающуюся длину хорды, линию четвертей хорд с ненулевой кривизной и центральную линию крыла, которая является перпендикулярной последовательности центральных линий концевого завихрения лопасти несущего винта в соответствии с некоторыми вариантами осуществления.
Фиг. 1A, 1B и 1C показывают винтокрылый летательный аппарат 100 с фюзеляжем 104 и несущим винтом 102. Фиг. 1A показывает трехмерное представление винтокрылого летательного аппарата 100, в то время как фиг. 1B иллюстрирует упрощенный вид сбоку винтокрылого летательного аппарата 100, а фиг. 1C - упрощенный вид сверху винтокрылого летательного аппарата 100.
Винтокрылый летательный аппарат 100 иллюстративно осуществляется как вертолет, и несущий винт 102 иллюстративно осуществляется как бесшарнирный или бесшарнирный и бесподшипниковый многолопастный винт, имеющий множество лопастей 102a, 102b, 102c, 102d, 102e винта.
Следует, однако, отметить, что настоящие варианты осуществления не ограничиваются вертолетами и могут аналогично быть применены к другим винтокрылым летательным аппаратам, которые оборудуются поворотными крыльями, независимо от того, определяют ли такие поворотные крылья шарнирно-сочлененные, бесшарнирные или бесшарнирные и бесподшипниковые многолопастные винты. Следует дополнительно отметить, что настоящие варианты осуществления могут также быть применены в случаях, когда предусматривается более одного несущего винта.
Фактически, примерные варианты осуществления могут быть включены в любой винтокрылый летательный аппарат по меньшей мере с одним несущим винтом и крылом-стабилизатором, в котором неустойчивые аэродинамические нагрузки, вызванные спутной струей по меньшей мере одного несущего винта на крыле-стабилизаторе, должны быть уменьшены. Примеры таких транспортных средств могут включать в себя винтокрылые летательные аппараты, такие как летательный аппарат с вертикальным взлетом и посадкой, мультикоптеры, вертолеты, дроны и т.д.
Иллюстративно, винтокрылый летательный аппарат 100 может иметь фюзеляж 104, который формирует планер винтокрылого летательного аппарата 100. Фюзеляж 104 может соединяться с подходящим посадочным шасси и задней частью фюзеляжа. В качестве примера, посадочное шасси может быть посадочным шасси типа салазок, как показано на фиг. 1A. В качестве другого примера, посадочное шасси может иметь колеса, как показано на фиг. 1B. Задняя часть фюзеляжа может быть соединена с хвостовой балкой 121. Фюзеляж 104 для примера формирует кабину 104a, определяющую нос 107 фюзеляжа в носовой области 108 винтокрылого летательного аппарата 100.
Фиг. 1B и 1C показывают винтокрылый летательный аппарат 100 в декартовой системе координат с осями X, Y и Z. Ось X продолжается в продольном направлении винтокрылого летательного аппарата 100 через носовую область 108 и хвостовую область 109 и иногда также называется продольной осью или осью длины.
Ось Y продолжается в поперечном направлении винтокрылого летательного аппарата 100 через левый и правый концы 160 крыла для крыла-стабилизатора 133 и иногда также называется поперечной осью, боковой осью или осью ширины. Ось Z продолжается в вертикальном направлении винтокрылого летательного аппарата 100 и иногда также называется вертикальной осью или осью высоты.
Фюзеляж 104 может иметь центральную линию 130. Центральная линия 130 может быть параллельной или совпадать с осью X через центр 103 несущего винта. Другими словами, плоскость, определенная центральной линией 130 и осью Z, может определять ось симметрии фюзеляжа 104 в поперечном направлении.
В качестве примера, винтокрылый летательный аппарат 100 может включать в себя по меньшей мере одно устройство реактивного момента, сконфигурированное, чтобы обеспечивать реактивный момент во время работы, т.е., оказывать противодействие крутящему моменту, создаваемому вращением по меньшей мере одного многолопастного винта 102, в целях балансировки винтокрылого летательного аппарата 100 с точки зрения поворота вокруг вертикальной оси. Если желательно, устройство реактивного момента может быть закрыто кожухом. По меньшей мере, одно устройство реактивного момента иллюстративно предусматривается в хвостовой области 109 винтокрылого летательного аппарата 100 и может иметь хвостовой винт 122.
Хвостовая область 109 винтокрылого летательного аппарата 100 может иметь киль 131, который присоединяется к хвостовой балке 121, если желательно. В некоторых вариантах осуществления киль 131 может быть снабжен рулем 132 направления. Руль 132 направления может быть приспособлен для обеспечения улучшенного управления направлением и для оптимизированной путевой балансировки винтокрылого летательного аппарата 100. Если желательно, руль 132 направления может быть отклонен до больших углов, чтобы уменьшать придаваемое боковое сопротивление киля 131 при боковом полете.
Иллюстративно, киль 131 может быть снабжен подходящим горизонтальным крылом-стабилизатором 133 в форме T-образного хвостового оперения. Другими словами, как показано на фиг. 1A и 1B, горизонтальное крыло-стабилизатор 133 может быть соединено с фюзеляжем 104 через киль 131 и хвостовую балку 121. Как показано, крыло-стабилизатор 133 может быть установлено на вершину киля 131.
Если желательно, крыло-стабилизатор 133 может быть установлено в другой позиции винтокрылого летательного аппарата 100. Например, крыло-стабилизатор 133 может быть установлено непосредственно на фюзеляж 104, хвостовую балку 121 и/или киль 131 в позиции, которая находится на оси Z высоты ниже вершины киля 131.
Крыло-стабилизатор 133 может быть снабжено левым и правым концами 160 крыла, передней кромкой 136, которая является дугообразной, и задней кромкой 137, которая является дугообразной.
В качестве примера, крыло-стабилизатор 133 может иметь постоянную длину хорды. Другими словами, хорда крыла-стабилизатора 133, которая является воображаемой прямой линией, которая соединяет переднюю кромку 136 и заднюю кромку 137 крыла-стабилизатора 133, может иметь постоянную длину для каждой точки на передней кромке 136. Если желательно, крыло-стабилизатор 133 может иметь сужающуюся длину хорды. Другими словами, длина хорды крыла-стабилизатора 133 может быть больше на центральной линии 130 фюзеляжа 104 по сравнению с левым и правым концами 160 крыла.
Иллюстративно, линия четвертей хорд крыла-стабилизатора 133, которая является воображаемой линией, которая соединяет все точки на различных хордах, которые находятся на четверти соответствующей длины хорды от передней кромки 136, может иметь ненулевую кривизну.
Как показано на фиг. 1A и 1C, линия четвертей хорд крыла-стабилизатора 133 является изогнутой назад. Другими словами, когда чертится соединительная линия между двумя произвольными точками на линии четвертей хорд крыла-стабилизатора 133, отрезок линии четвертей хорд между этими двумя произвольными точками находится ближе к носовой области 108, чем к соединительной линии.
Если желательно, линия четвертей хорд крыла-стабилизатора 133 может быть изогнута вперед. Другими словами, когда чертится соединительная линия между двумя произвольными точками на линии четвертей хорд крыла-стабилизатора 133, отрезок линии четвертей хорд между этими двумя произвольными точками находится ближе к хвостовой области 109, чем к соединительной линии.
Если желательно, крыло-стабилизатор 133 может иметь вертикальные или почти вертикальные расширения на левом и правом концах 160 крыла. Такие вертикальные или почти вертикальные расширения на концах крыла иногда также называются концевыми аэродинамическими поверхностями 138. Как показано на фиг. 1A, крыло-стабилизатор 133 имеет наклоненные книзу концевые аэродинамические поверхности 138. Однако, крыло-стабилизатор 133 может иметь отклоненные кверху концевые аэродинамические поверхности 138 или концевые аэродинамические поверхности 138, которые протягиваются вверх и вниз, если желательно.
Несущий винт 102 и, таким образом, множество лопастей 102a, 102b, 102c, 102d, 102e винта, является приводимым в движение, т.е., управляемым, чтобы оказывать влияние на ассоциированный угол тангажа винтокрылого летательного аппарата 100 в действии. Иллюстративно, несущий винт 102 определяет центр 103 несущего винта и содержит колонку несущего винта. Колонка несущего винта имеет ось колонки несущего винта (например, ось 103a колонки несущего винта на фиг. 1B), которая определяет ость вращения несущего винта 102.
Во время работы несущий винт 102 может формировать структуры воздушных потоков для обеспечения подъемной и направленной вперед или назад тяги. Такие структуры воздушных потоков иногда также называются спутной струей несущего винта или спутной струей. Спутная струя несущего винта для несущего винта 102 может взаимодействовать с крылом-стабилизатором 133. В частности, спутная струя несущего винта может накладывать аэродинамическую нагрузку на крыло-стабилизатор 133.
Аэродинамическая нагрузка на крыло-стабилизатор 133 может быть разделена на статическую аэродинамическую нагрузку и неустойчивую аэродинамическую нагрузку. Статическая аэродинамическая нагрузка является желательной, поскольку она улучшает устойчивость полета и эксплуатационные качества. Неустойчивая аэродинамическая нагрузка является нежелательной, поскольку она создает конструктивное напряжение на крыле-стабилизаторе 133 и фрагментах винтокрылого летательного аппарата 100, к которым крыло-стабилизатор 133 присоединяется.
Неустойчивые аэродинамические нагрузки на крыле-стабилизаторе 133 вызываются изменениями в скорости воздушного потока и/или направлении воздушного потока и могут вызывать изменения подъема в крыле-стабилизаторе 133. Эти изменения подъема на крыле-стабилизаторе 133 возникают в ответ на изменения потока на линии четвертей хорд крыла-стабилизатора 133.
Важные изменения в скорости воздушного потока и направлении возникают в спутной струе несущего винта в форме завихрений. Завихрения являются объемами воздуха, которые вращаются вокруг вытянутой, обычно искривленной оси, которая является центром завихрения. В винтокрылом летательном аппарате 100 завихрения исходят от концов лопастей 102a, 102b, 102c, 102d, 102e винта.
Вследствие вращения лопастей винта и одновременного движения вперед в направлении полета, форма оси концевого завихрения винта является похожей на форму спирали, когда рассматривается сверху. Спираль, в то время как создается на концах лопастей винта, перемещается назад относительно винтокрылого летательного аппарата 100 во время полета вперед со скоростью, почти идентичной скорости полета. Некоторая доля завихрений на концах лопастей винта будет двигаться посредством крыла-стабилизатора 133 и вызывать неустойчивые аэродинамические нагрузки.
Поскольку изменения подъема на крыле-стабилизаторе 133 возникают в ответ на изменения потока на линии четвертей хорд крыла-стабилизатора 133, неустойчивые аэродинамические нагрузки на крыле-стабилизаторе 133 могут быть смоделированы приблизительно посредством взаимодействия между завихрениями на концах лопастей винта и линией четвертей хорд крыла-стабилизатора 133.
Как упомянуто выше, линия четвертей хорд крыла-стабилизатора 133 имеет ненулевую кривизну. Таким образом, взаимодействие между завихрениями, формируемыми по меньшей мере одним несущим винтом 102, и линией четвертей хорд может быть распределено по времени по сравнению с крыльями-стабилизаторами с прямой линией четвертей хорд.
Фактически, вследствие спиральной структуры, завихрения на концах лопастей винта периодически проходят через линию четвертей хорд крыла-стабилизатора 133. Для винта с N лопастей винта создается N спиралеобразных систем концевых завихрений винта, и, следовательно, N завихрений на концах лопастей винта проходят через крыло-стабилизатор 133 при каждом обороте винта. Соответственно, неустойчивые аэродинамические нагрузки на крыле-стабилизаторе 133 возникают периодически с основной частотой N для каждого оборота винта.
Благодаря изогнутой форме линии четвертей хорд форма периодических неустойчивых аэродинамических нагрузок в месте присоединения крыла-стабилизатора 133 на киле 131 или хвостовой балке 121 может иметь более плавные пики и уменьшенные амплитуды по сравнению с крылом-стабилизатором с прямой линией четвертей хорд. Это дополнительно иллюстрируется на фиг. 3A-3C.
Фиг. 2 показывает иллюстративное крыло-стабилизатор, имеющее линию четвертей хорд с ненулевой кривизной в соответствии с некоторыми вариантами осуществления. Как показано на фиг. 2, крыло-стабилизатор 200 может иметь дугообразную переднюю кромку 210, дугообразную заднюю кромку 220 и линию 240 четвертей хорд с ненулевой кривизной.
Выражение "дугообразная", когда применяется к передней кромке 210, подразумевает, что передняя кромка 210 является изогнутой по меньшей мере частично между концами 260 крыла. Предпочтительно, передняя кромка 210 является изогнутой по меньшей мере поблизости от центральной линии 230. Если желательно, дугообразная передняя кромка 210 может быть частично прямой.
Аналогично, выражение "дугообразная", когда применяется к задней кромке 220, подразумевает, что задняя кромка 220 является изогнутой по меньшей мере частично между концами 260 крыла. Предпочтительно, задняя кромка 220 является изогнутой. Если желательно, дугообразная задняя кромка 220 может быть частично прямой.
Только в качестве примера, а не ограничения настоящих вариантов осуществления соответствующим образом, дугообразные объекты включают в себя по меньшей мере частично C-образные объекты, объекты, имеющие форму подобно сегменту параболы, объекты, имеющие форму подобно сегменту эллипса, полуовальные объекты, объекты, которые являются закругленными в некоторых фрагментах и прямыми в других фрагментах, и т.д.
Как показано на фиг. 2, крыло-стабилизатор 200 может иметь размах 255 крыла, который может быть расстоянием между левым и правым концами 260 крыла. Размах 255 крыла может быть суммой размаха 257 левого полукрыла и размаха 258 правого полукрыла, в результате чего, размах 257 левого полукрыла может быть расстоянием между левым концом 260 крыла и центральной линией 230, а размах 258 правого полукрыла может быть расстоянием между правым концом 260 крыла и центральной линией 230.
Иллюстративно, крыло-стабилизатор 200 может иметь длину 250 хорды, которая уменьшается от центральной линии 230 фюзеляжа к левому и правому концам 260 крыла. Другими словами, крыло-стабилизатор 200 может сужаться. Если желательно, крыло-стабилизатор 200 может иметь постоянную длину хорды по меньшей мере для фрагмента размаха 255 крыла.
Рассмотрим сценарий, в котором система координат вводится, как показано на фиг. 2 с осью Y в качестве боковой или поперечной оси и осью X в качестве оси длины или продольной оси. Рассмотрим дополнительно, что ось Y масштабируется так, что левый и правый концы 260 крыла совпадают с координатами Y = -1 и Y=1, соответственно, и что точка начала координат находится на центральной линии 230. Рассмотрим дополнительно, что ось X должна масштабироваться так, что расстояние от начала координат до X=1 равно размаху полукрыла.
Если желательно, в случае крыла-стабилизатора 200 с неравными размахами левого и правого полукрыльев, отдельная система координат для каждого полукрыла может быть введена. Однако, как показано на фиг. 2, крыло-стабилизатор 200 имеет равные размахи левого и правого полукрыльев 257, 258 и линию 240 четвертей хорд, которая является симметричной центральной линии 230 фюзеляжа.
В этом сценарии линия 240 четвертей хорд может быть описана как функция X=f(Y), в соответствии с чем, кривизна линии 240 четвертей хорд является второй производной d2/dY2(f(Y)). Поскольку ось X является положительной в направлении передней кромки 210, изгиб назад (т.е., раскрытие изгиба ориентировано к хвостовой области винтокрылого летательного аппарата (например, хвостовой области 109 винтокрылого летательного аппарата 100 на фиг. 1)) соответствует отрицательным значениям (т.е., d2/dY2 (f(Y)) < 0), а изгиб вперед (т.е., раскрытие изгиба ориентировано к носовой области винтокрылого летательного аппарата (например, носовой области 108 винтокрылого летательного аппарата 100 на фиг. 1)) - положительным значениям (т.е., d2/dY2 (f(Y)) < 0), в то время как прямая линия четвертей хорд имеет нулевую кривизну (т.е., d2/dY2 (f(Y)) = 0).
В качестве примера, абсолютное значение ненулевой кривизны линии 240 четвертей хорд может быть больше 0,2 (т.е., |d2/dY2 (f(Y))| > 0,2). В качестве другого примера, абсолютное значение ненулевой кривизны линии 240 четвертей хорд может быть меньше 4 (т.е., |d2/dY2 (f(Y))| < 4).
Если желательно, абсолютное значение ненулевой кривизны линии 240 четвертей хорд может иметь верхнее предельное значение на основе расстояния от центральной линии 230. Например, абсолютное значение ненулевой кривизны линии 240 четвертей хорд может быть меньше 4-2*|Y| (т.е., |d2/dY2 (f(Y))| < 4-2*|Y|).
Иллюстративно, линия 240 четвертей хорд может иметь ненулевую кривизну (т.е., d2/dY2 (f(Y)) ≠ 0) по всему размаху 255 крыла. Если желательно, линия 240 четвертей хорд может иметь ненулевую кривизну (т.е., d2/dY2 (f(Y)) ≠ 0) в диапазонах Y = ]0,1; 0,9] и Y = ]-0,1; -0,9] или частях этих диапазонов. В качестве примера, линия 240 четвертей хорд может иметь ненулевую кривизну по меньшей мере в диапазонах Y = ] 0,1; 0,7] и/или Y = ]-0,1; -0,7].
Другими словами, рассмотрим только правое полукрыло (т.е., Y = ] 0,1; 0,7], две точки 272, 278 могут быть расположены на линии 240 четвертей хорд на расстоянии 282, 288 от центральной линии 230 фюзеляжа, соответственно, так что расстояния 282, 288 составляют 10% и 70% размаха 257, 258 полукрыла, соответственно, в результате чего, ненулевая кривизна линии 240 четвертей хорд является ненулевой по меньшей мере между двумя точками 272, 278.
Если желательно, две дополнительные точки 274, 276 могут быть расположены на линии 240 четвертей хорд на расстояниях 284, 286 от центральной линии 230 фюзеляжа, соответственно, так что расстояния 284, 286 составляют 30% и 50% размаха 257, 258 полукрыла, а прямая линия 290 между двумя точками 272, 278 может иметь расстояние 270 от линии 240 четвертей хорд между двумя дополнительными точками 274, 276, которое больше 2% размаха 257, 258 полукрыла.
В некоторых вариантах осуществления ненулевая кривизна линии 240 четвертей хорд изменяется от первого значения на первом расстоянии от центральной линии 230 фюзеляжа до второго значения на втором расстоянии от центральной линии 230 фюзеляжа, так что ненулевая кривизна линии 240 четвертей хорд является непостоянной между первым и вторым расстоянием от центральной линии 230 фюзеляжа.
В качестве примера, линия 240 четвертей хорд может иметь кривизну 2,5 на центральной линии 230 (т.е., |d2/dY2 (f(Y))| = 2,5 при Y=0) и уменьшаться к левому и правому концам 260 крыла до кривизны 0,5 (т.е., |d2/dY2 (f(Y))| = 0,5 при Y = ±1). В качестве другого примера, линия 240 четвертей хорд может иметь кривизну 3,0 на центральной линии 230 (т.е., |d2/dY2 (f(Y))| = 3,0 при Y=0) и уменьшаться к левому и правому концам 260 крыла до кривизны 0,25 (т.е., |d2/dY2 (f(Y))| = 0,25 при Y = ±1).
В некоторых вариантах осуществления линия 240 четвертей хорд может иметь излом. В качестве примера, излом в линии 240 четвертей хорд может быть на центральной линии 230 (т.е., при Y=0). В качестве другого примера, линия 240 четвертей хорд может иметь излом к левому и правому концам 260 крыла (например, при Y = ±0,95).
Если желательно, семейство вариантов осуществления может быть задумано по величине средней кривизны на протяжении конкретного Y-диапазона. Таким образом, средняя кривизна на протяжении диапазона Y-значений (т.е., в интервале [Y1; Y2] определяется как абсолютное значение разницы между первой производной в начале диапазона (т.е., d/dY(f(Y); Y=Y1)) и первой производной в конце диапазона (т.е., d/dY(f(Y); Y=Y2), разделенной на (Y2-Y1). Величина средней кривизны, следовательно, равна |(d/dy(f(Y); Y=Y1) - d/dY(f(Y); Y=Y2))/(Y2-Y1)|.
Примеры для таких семейств вариантов осуществления показаны в таблицах 1, 2 и 3. Таблица 1 показывает семейства вариантов осуществления для Y1=0,1, таблица 2 - семейства вариантов осуществления для Y1=0,2, и таблица 3 - семейства вариантов осуществления для Y1=0,3. Дополнительные семейства вариантов осуществления являются возможными для различных значений Y1 и/или Y2.
Таблица 1
Таблица 2
Таблица 3
Изменчивость координаты Y1 может быть важной для крыльев-стабилизаторов 200, которые выступают из фюзеляжа, киля или хвостовой балки (например, фюзеляжа 104, киля 131 или хвостовой балки 121 винтокрылого летательного аппарата 100 на фиг. 1). Например, крыло-стабилизатор, которое выступает из хвостовой балки, может не иметь значений кривизны при Y-значениях, которые будут внутри хвостовой балки. Следовательно, вариант осуществления может быть выбран из семейства, которое отличается значением для Y1, которое лежит снаружи хвостовой балки.
Как упомянуто выше, винт с N лопастями винта создает N спиралеобразных систем концевых завихрений винта, и, следовательно, N завихрений на концах лопастей винта проходит через крыло-стабилизатор 200 при каждом обороте винта. Соответственно, неустойчивые аэродинамические нагрузки на крыле-стабилизаторе 200 возникают периодически с основной частотой N для каждого оборота винта.
Благодаря изогнутой форме линии четвертей хорд форма периодических неустойчивых аэродинамических нагрузок в месте присоединения крыла-стабилизатора 200 на киле или хвостовой балке может иметь более плавные пики и уменьшенные амплитуды по сравнению с крылом-стабилизатором с прямой линией четвертей хорд.
Фиг. 3A, 3B и 3C являются схемами иллюстративной временной последовательности взаимодействий между центральной линией концевого завихрения винта и линией четвертей хорд с ненулевой кривизной. Как показано на фиг. 3A, 3B и 3C, крыло-стабилизатор 300 может иметь дугообразную переднюю кромку 310, дугообразную заднюю кромку 320 и линию 340 четвертей хорд. Иллюстративно показана центральная линия 330 фюзеляжа, к которой крыло-стабилизатор 300 является симметричным. Следовательно, линия 340 четвертей хорд является симметричной центральной линии 330.
Положим, что винтокрылый летательный аппарат стоит на своем посадочном шасси, винт может вращаться против часовой стрелки, когда рассматривается сверху, или может вращаться по часовой стрелке, когда рассматривается сверху.
Фиг. 3A показывает центральную линию 360 концевого завихрения винта, достигающую линии 340 четвертей хорд. В этой первоначальной ситуации (т.е., T=T1) центральная линия 360 концевого завихрения винта является касательной по отношению к линии 340 четвертей хорд, и взаимодействие между центральной линией 360 концевого завихрения винта и линией 340 четвертей хорд начинается.
Фиг. 3B показывает центральную линию 370 концевого завихрения винта, проходящую через линию 340 четвертей хорд через короткое время, после того как взаимодействие началось (т.е., при T=T2 с T2 > T1).
Фиг. 3C показывает центральную линию 380 концевого завихрения винта, когда взаимодействие с линией 340 четвертей хорд заканчивается, и центральная линия 380 концевого завихрения винта достигает пересечения линии 340 четвертей хорд и центральной линии 330 (т.е., при T=T3 с T3 > T2).
Центральная линия 360, 370, 380 концевого завихрения винта движется в течение более длительного времени (т.е., от T1 до T3) и на более длинное расстояние через линию 340 четвертей хорд крыла-стабилизатора 300 по сравнению со сравнимой прямой линией четвертей хорд сравнимого крыла-стабилизатора.
Таким образом, центральная линия 360, 370, 380 концевого завихрения винта взаимодействует в течение более длительной продолжительности времени с изогнутой линией 340 четвертей хорд, чем она будет взаимодействовать с прямой линией четвертей хорд. Более длительная продолжительность взаимодействия между центральной линией 360, 370, 380 концевого завихрения винта и линией 340 четвертей хорд подразумевает, в один конкретный момент времени, сравнительно локально более ограниченное влияние на линию 340 четвертей хорд, и, таким образом, меньшую аэродинамическую нагрузку, привносимую на крыло-стабилизатор 300.
В отличие от этого, если продолжительность взаимодействия является короткой, или если в крайнем случае центральная линия 360 концевого завихрения винта и линия четвертей хорд почти совпадают лишь на мгновение времени (например, как может происходить более вероятно в случае прямой линии четвертей хорд по сравнению со случаем правильно изогнутой линии четвертей хорд), изменение аэродинамической нагрузки является мгновенным, когда оно происходит по всему размаху крыла-стабилизатора почти в один и тот же момент времени, тем самым, вызывая короткие и сильные пики аэродинамической нагрузки.
Настоящие варианты осуществления крыла-стабилизатора 300 с изогнутой линией 340 четвертей хорд предоставляют возможность длительного времени взаимодействия (например, от T1 до T3) между центральной линией 360, 370, 380 концевого завихрения ротора и крылом-стабилизатором 300, создавая большое различие в кривизне и ориентации линии 340 четвертей хорд от кривизны и ориентации центральных линий 360, 370, 380 концевых завихрений винта.
Фиг. 3A, 3B и 3C показывают взаимодействие между изогнутой вперед центральной линией 360, 370, 380 концевого завихрения винта во времена T1, T2 и T3, соответственно, и изогнутой назад линией 340 четвертей хорд.
Центральные линии концевого завихрения винта с передним изгибом, как показано на фиг. 3A, 3B и 3C, обычно являются более уместными для T-образного хвостового оперения (т.е., крыла-стабилизатора, которое присоединяется на вершине киля) в крейсерском полете, поскольку изогнутые вперед центральные линии концевого завихрения винта формируются на задней кромке диска винта, а крыло-стабилизатор T-образного хвостового оперения является геометрически близким к задней кромке винта.
Следовательно, крыло-стабилизатор T-образного хвостового оперения с изогнутой назад линией четвертей хорд может быть менее подвержено влиянию центральных линий концевого завихрения винта, сформированных на задней кромке диска винта, по сравнению с крылом-стабилизатором с прямой линией четвертей хорд.
Однако, винт также формирует центральные линии концевого завихрения винта с задним изгибом. Например, винт может формировать центральные линии концевого завихрения винта с задним изгибом на передней кромке диска винта.
Крыло-стабилизатор, которое присоединяется так, что оно взаимодействует во многих полетных условиях с завихрениями, формируемыми на передней кромке диска винта, может взаимодействовать в течение более длительного времени с этими изогнутыми назад центральными линиями концевого завихрения винта, если линия четвертей хорд крыла-стабилизатора имеет передний изгиб. Следовательно, крыло-стабилизатор с передним изгибом может испытывать более низкие пики аэродинамической нагрузки, когда подвергается воздействию центральных линий концевого завихрения винта с задним изгибом.
Рассмотрим сценарий, в котором винтокрылый летательный аппарат является вертолетом с одним несущим винтом. Рассмотрим дополнительно, что центр несущего винта для несущего винта совпадает с центральной линией фюзеляжа (например, центр 103 несущего винта совпадает с центральной линией 130 фюзеляжа 104 на фиг. 1C), и что, вследствие асимметричной природы несущего винта относительно средней плоскости вертолета, центральные линии концевых завихрений винта, распространяемые несущим винтом, не являются симметричными к центральной линии фюзеляжа.
В этом сценарии форма изгиба линии 340 четвертей хорд и, таким образом, форма в плане крыла-стабилизатора 300 могут быть подогнаны в направлении минимизации аэродинамических нагрузок. В качестве примера, форма в плане крыла-стабилизатора 300 может быть спроектирована так, что, на основе действия винтокрылого летательного аппарата, суммарные аэродинамические нагрузки (например, полученные посредством интегрирования по размаху крыла для крыла-стабилизатора 300) в предварительно определенном местоположении (например, позиции присоединения крыла-стабилизатора 300) не превышают предварительно определенное значение.
В качестве другого примера, форма в плане крыла-стабилизатора 300 может быть спроектирована так, что, на основе действия винтокрылого летательного аппарата, временная последовательность локальных взаимодействий между центральными линиями 360, 370, 380 концевого завихрения винта и линией 340 четвертей хорды в каждом местоположении крыла-стабилизатора 300 подходящим образом смещается, чтобы добиваться почти постоянной суммарной аэродинамической нагрузки в уместном местоположении крыла-стабилизатора 300 во времени.
Как показано на фиг. 2, 3A, 3B и 3C, крыло-стабилизатор может быть сужающимся. Другими словами, длина 250 хорды может быть длиннее на центральной линии 230 по сравнению с концами 260 крыла, или отношение длины 250 хорды на концах 260 крыла, разделенной на длину 250 хорды на центральной линии 230, может быть меньше единицы. В качестве примера, отношение длины 250 хорды на концах 260 крыла, разделенной на длину 250 хорды на центральной линии 230, может быть в интервале между 0,2 и 0,8.
Однако, даже если крыло-стабилизатор 200, 300, показанное на фиг. 2, 3A, 3B и 3C, сужается, изогнутая линия 240, 340 четвертей хорд может быть объединена с любым видом расчета длины хорды по размаху крыла.
В качестве примера, фиг. 4 является схемой последовательности центральных линий 460, 470, 480 концевых завихрений винта, достигающих иллюстративного крыла-стабилизатора 400 с постоянной длиной 450 хорды в соответствии с некоторыми вариантами осуществления. Другими словами, крыло-стабилизатор 400 может иметь постоянную длину 450 хорды между левым и правым концами 457 крыла для крыла-стабилизатора 400.
Как показано на фиг. 4, крыло-стабилизатор 400 может иметь дугообразную переднюю кромку 410, дугообразную заднюю кромку 420 и линию 440 четвертей хорд с ненулевой кривизной. Иллюстративно показана центральная линия 430 фюзеляжа, к которой крыло-стабилизатор 400 является симметричным. Следовательно, линия 440 четвертей хорд является симметричной центральной линии 430.
В качестве примера, длина 450 хорды может быть постоянной в любом узле Y по размаху крыла (т.е., всюду между Y = -1 и Y=1). В этом примере, поскольку крыло-стабилизатор 400 имеет дугообразную переднюю кромку 410 и постоянную длину 450 хорды в любом узле Y по размаху крыла, передняя кромка 410, задняя кромка 420 и линия 440 четвертей хорд имеют одинаковую дугообразную форму и одинаковую ненулевую кривизну.
Как показано на фиг. 2, 3A, 3B, 3C и 4, крыло-стабилизатор 200, 300, 400 может быть симметричным центральной линии 230, 330, 430. Однако, крыло-стабилизатор может быть асимметричным к центральной линии, если желательно.
В качестве примера, фиг. 5 является схемой последовательности центральных линий 560, 570, 580 концевых завихрений винта, достигающих иллюстративного крыла-стабилизатора 500, имеющего асимметричную стреловидность между левым и правым полукрыльями 504, 502 в соответствии с некоторыми вариантами осуществления.
Фактически, как показано на фиг. 5, крыло-стабилизатор 500 может иметь левое полукрыло 504, которое имеет первую стреловидность, и правое полукрыло 502, которое имеет вторую стреловидность, которая отличается от первой стреловидности. В качестве примера, левое полукрыло 504 может иметь меньшую стреловидность по сравнению с правым полукрылом 502. Если желательно, левое полукрыло 504 может иметь большую стреловидность по сравнению с правым полукрылом 502.
Как показано на фиг. 5, крыло-стабилизатор 500 может иметь дугообразную переднюю кромку 510, дугообразную заднюю кромку 520 и линию 540 четвертей хорд с ненулевой кривизной.
В качестве примера, крыло-стабилизатор 500 может иметь постоянную длину 550 хорды. Если желательно, длина 550 хорды может быть постоянной в любом узле Y по размаху крыла (т.е., всюду между Y = -1 и Y=1). В этом примере, поскольку крыло-стабилизатор 500 имеет дугообразную переднюю кромку 510 и постоянную длину 550 хорды в любом узле Y по размаху крыла, передняя кромка 510, задняя кромка 520 и линия 540 четвертей хорд имеют одинаковую дугообразную форму и одинаковую ненулевую кривизну.
Однако, поскольку крыло-стабилизатор 500 является ассиметричным к центральной линии 530, левое полукрыло 504 имеет линию 540 четвертей хорд с первой кривизной, а правое полукрыло 502 имеет линию 540 четвертей хорд со второй кривизной, в результате чего, вторая кривизна отличается от первой кривизны.
Например, правое полукрыло 502 может иметь более сильную кривизну линии 540 четвертей хорд по сравнению с левым полукрылом 504. Если желательно, правое полукрыло 502 может иметь меньшую кривизну линии 540 четвертей хорд по сравнению с левым полукрылом 504.
Если желательно, левое полукрыло 504 может иметь первую длину, а правое полукрыло 502 может иметь вторую длину, которая отличается от первой длины. Другими словами, одно из левого полукрыла 504 и правого полукрыла 502 может предоставлять более 50% размаха 555 крыла. В качестве примера, левое полукрыло 504 может быть короче правого полукрыла 502. В качестве другого примера, правое полукрыло 502 может быть короче левого полукрыла 504.
Длины правого и левого полукрыльев 502, 504 могут быть выбраны, чтобы уравновешивать долю аэродинамических нагрузок на правом и левом полукрыльях 502, 504 в моменте крена около места присоединения крыла-стабилизатора 500 (например, на киле, хвостовой балке или фюзеляже винтокрылого летательного аппарата). Уменьшение либо статического и/либо динамического компонента аэродинамической нагрузки в месте присоединения крыла-стабилизатора может быть определено на основе конструктивных потребностей.
Если желательно, крыло-стабилизатор 500 может включать в себя концевые аэродинамические поверхности (например, концевые аэродинамические поверхности 138 на фиг. 1). Концевые аэродинамические поверхности могут увеличивать аэродинамическую подъемную силу крыла-стабилизатора 500 без увеличения размаха 555 крыла.
Поскольку размах 555 крыла и, более конкретно, длина правого и левого полукрыльев 502, 504, соответственно, определяет эффективное плечо рычага для моментов крена в месте присоединения крыла-стабилизатора 500, и поскольку ориентация концевой аэродинамической поверхности является перпендикулярной к центральным линиям 560, 570, 580 концевых завихрений винта, что ограничивает взаимодействие между центральными линиями 560, 570, 580 концевого завихрения винта и концевыми аэродинамическими поверхностями, использование концевых аэродинамических поверхностей имеет потенциал для уменьшения колебания моментов крена в месте присоединения крыла-стабилизатора 500 для заданной цели аэродинамической подъемной силы.
Асимметрия в кривизне линии 540 четвертей хорд и/или изгибе между правым полукрылом 502 и левым полукрылом 504 может быть использована для дополнительного уменьшения неустойчивых аэродинамических нагрузок на крыле-стабилизаторе 500.
Например, выбор сочетания предварительно определенной кривизны линии 540 четвертей хорд и предварительно определенной стреловидности для левого и правого полукрыльев 504, 502 может предоставлять возможность независимо регулировать временную последовательность взаимодействий между центральными линиями 560, 570, 580 концевых завихрений винта вдоль узлов Y по размаху крыла для левого и правого полукрыльев 504, 502 крыла-стабилизатора 500.
Чтобы объяснять действие, ранее симметричное крыло-стабилизатор может быть рассмотрено повернутым на некоторый угол Ψ по сравнению с центральной линией фюзеляжа, что приводит в результате к асимметрии стреловидности.
Фиг. 6 является схемой иллюстративного крыла-стабилизатора 600, имеющего линию 640 четвертей хорд с ненулевой кривизной и центральную линию 635 крыла, которая является перпендикулярной последовательности центральных линий 660, 670, 680 концевого завихрения винта в соответствии с некоторыми вариантами осуществления.
В качестве примера, крыло-стабилизатор 600 может иметь сужающуюся длину 650 хорды. Если желательно, длина 650 хорды может уменьшаться от центральной линии 635 крыла к концам крыла (т.е., длина 650 хорды уменьшается с увеличением в расстоянии от центральной линии 635 крыла). В этом примере передняя кромка 610, задняя кромка 620 и линия 640 четвертей хорд, все могут иметь различную дугообразную форму и различную ненулевую кривизну.
Как показано на фиг. 6, крыло-стабилизатор 600 может быть симметричным по отношению к центральной линии 635 крыла. Поскольку центральная линия 635 крыла повернута на угол Ψ по сравнению с центральной линией 630 фюзеляжа, крыло-стабилизатор 600 может быть ассиметричным по отношению к центральной линии 630 фюзеляжа.
Поскольку центральная линия 635 крыла является перпендикулярной последовательности центральных линий 660, 670, 680 концевых завихрений винта, каждая центральная линия из центральных линий 660, 670, 680 концевых завихрений винта достигает обоих полукрыльев крыла-стабилизатора 600 в одно и то же время. Таким образом, изгибающие моменты около центральной линии 635 крыла для крыла-стабилизатора 600 возникают синхронно во времени.
Как показано на фиг. 6, крыло-стабилизатор 600 может быть повернуто по сравнению с центральной линией 630 фюзеляжа, так что центральные линии 660, 670, 680 концевых завихрений винта являются перпендикулярными центральной линии 635 крыла. Фактический угол ψ поворота между центральной линией 635 крыла и центральной линией 630 фюзеляжа может зависеть от фактической конфигурации винтокрылого летательного аппарата.
В качестве примера, угол ψ между 0° и 30° может быть выбран для винтокрылого летательного аппарата, имеющего один несущий винт, который имеет центр несущего винта на центральной линии 630 фюзеляжа перед крылом-стабилизатором 600 и вращается против часовой стрелки, когда рассматривается сверху. В качестве другого примера, угол ψ между 0° и -30° может быть выбран для винтокрылого летательного аппарата, имеющего один несущий винт, который имеет центр несущего винта на центральной линии 630 фюзеляжа перед крылом-стабилизатором 600 и вращается по часовой стрелке, когда рассматривается сверху.
Упругость крыла-стабилизатора 200, 300, 400, 500 или 600, показанного на фиг. 2-6, может влиять на аэродинамическую нагрузку, поскольку кривизна линии 240, 340, 440, 540, 640 четвертей хорд может вести к связанной реакции при изгибании и скручивании. Таким образом, вертикальный изгиб крыла-стабилизатора 200, 300, 400, 500, 600 вследствие аэродинамических нагрузок может сопровождаться упругим скручиванием крыла-стабилизатора вокруг оси Y. Предоставление крыла-стабилизатора, которое предоставляет возможность упругого скручивания, и/или которое имеет скрученную конструкцию вокруг оси Y в месте присоединения крыла-стабилизатора, может уменьшать аэродинамические нагрузки, поскольку скручивание может изменять углы атаки и, следовательно, аэродинамические нагрузки на крыло-стабилизатор.
Если желательно, крыло-стабилизатор 200, 300, 400, 500 или 600 на фиг. 2-6 может иметь скручивание, которое является изменением углов между линиями хорд и горизонтальной XY-плоскостью для различных узлов Y по размаху крыла. Другими словами, крыло-стабилизатор 200, 300, 400, 500 или 600 может иметь переменный угол установки по меньшей мере в фрагменте размаха крыла.
Если желательно, крылья-стабилизаторы 200, 300, 400, 500 или 600 на фиг. 2-6 могут иметь скручивание в дополнение к линии 240, 340, 440, 540 или 640 четвертей хорд с ненулевой кривизной. Дополнительное скручивание крыльев-стабилизаторов 200, 300, 400, 500 или 600 может компенсировать ситуацию асимметричного притекающего потока на левом и правом полукрыльях соответствующего крыла-стабилизатора 200, 300, 400, 500 или 600.
Рассмотрим сценарий, в котором спутная струя несущего винта не является симметричной относительно центральной линии фюзеляжа. Например, как показано на фиг. 5, спутная струя несущего винта, которая формирует центральные линии 560, 570, 580 концевых завихрений винта, не является симметричной по отношению к плоскости, определенной центральной линией 530 фюзеляжа и осью Z.
В этом сценарии центральные линии 560, 570, 580 концевых завихрений винта могут вести к асимметричным средним аэродинамическим нагрузкам между левым полукрылом 504 и правым полукрылом 502 в случае нескрученного горизонтального крыла-стабилизатора.
В качестве примера, крыло-стабилизатор 500 может уравнивать среднее значение по времени для подъемной силы и момента в корневой части левого и правого полукрыльев 504, 502 в месте присоединения крыла-стабилизатора 500 для большинства уместных состояний полета (например, горизонтальный полет вперед) посредством изогнутой линии 540 четвертей хорд и переменного угла наклона по размаху 555 крыла, тем самым, уменьшая объединенный статический момент крена, который оказывается левым и правым полукрыльями 504, 502 в месте присоединения крыла-стабилизатора 500.
Если желательно, крыло-стабилизатор 200, 300, 400, 500, 600 на фиг. 2-6 может включать в себя распределение по размаху крыла углов наклона. Распределение по размаху крыла углов наклона может уменьшать риск срыва потока в корневой части крыла-стабилизатора. Опасность срыва потока увеличивается с величиной отрицательного давления на крыле-стабилизаторе.
Иллюстративно, угол атаки может быть уменьшен в направлении от концов крыла для крыла-стабилизатора 200, 300, 400, 500 или 600 на фиг. 2-6 к корневой части крыла-стабилизатора для того, чтобы уменьшать величину отрицательного давления, создаваемого на нижней поверхности корневой части крыла-стабилизатора.
Фрагмент поверхности крыла-стабилизатора, который находится близко к корневой части крыла-стабилизатора, является особенно подверженным срыву потока, если крыло-стабилизатор установлено на киль винтокрылого летательного аппарата. Фактически, область низкого давления киля распространяется на часть поверхности крыла-стабилизатора, близкую к корневой части крыла-стабилизатора, в дополнение к низкому давлению, вызываемому самим крылом-стабилизатором.
Киль винтокрылого летательного аппарата может обеспечивать противодействующий крутящий момент против крутящего момента винта. Например, киль может формировать усилие вправо (т.е., в положительном Y-направлении) в винтокрылом летательном аппарате с винтом, который вращается против часовой стрелки, когда рассматривается сверху. Фактически, усилие, создаваемое килем, достигается посредством отрицательного давления на правой поверхности киля.
В этом примере угол наклона, равный нулю градусов, между хордой крыла-стабилизатора и XY-плоскостью может быть на правой стороне киля (т.е., в узле по размаху крыла с положительным Y). Если желательно, угол наклона между хордой крыла-стабилизатора и XY-плоскостью может непрерывно увеличиваться от узла по размаху крыла, где угол наклона равен нулю градусов, к левому концу крыла (т.е., в отрицательном Y-направлении) и постоянно уменьшается от узла по размаху крыла, где угол наклона равен нулю градусов, к правому концу крыла (т.е., в положительном Y-направлении).
Альтернативно, для винта, вращающегося по часовой стрелке, когда рассматривается сверху, левая поверхность киля будет подвержена отрицательному давлению. Соответственно, угол наклона, равный нулю градусов, между хордой крыла-стабилизатора и XY-плоскостью может быть на левой стороне киля (т.е., в узле по размаху крыла с отрицательным Y).
Если желательно, угол наклона между хордой крыла-стабилизатора и XY-плоскостью может непрерывно увеличиваться от узла по размаху крыла, где угол наклона равен нулю градусов, к правому концу крыла (т.е., в положительном Y-направлении) и постоянно уменьшается от узла по размаху крыла, где угол наклона равен нулю градусов, к левому концу крыла (т.е., в отрицательном Y-направлении).
Распределения угла наклона по всему размаху крыла-стабилизатора могут быть сдвинуты в целом вдоль ординаты (т.е., сдвинуты по оси Y, чтобы равномерно увеличивать или уменьшать угол наклона по всему размаху крыла), что не изменяет колебание по абсциссе (т.е., скручивание по оси X), а только общий наклон и, таким образом, подъемную силу всего крыла-стабилизатора.
В качестве примера, угол наклона может иметь большее изменение в направлении корневой части крыла-стабилизатора по сравнению с изменением в направлении концов крыла-стабилизатора. Другими словами, для заданного угла θ наклона и поперечной оси Y от Y = -1 на левом конце крыла до Y=1 на правом конце крыла для крыла-стабилизатора, изменение в угле наклона dθ/dY является большим по сравнению со средним скручиванием (т.е., θ(Y=-1) - θ(Y=1))/2) в области по размаху крыла Y = [-0,5…0,5].
Иллюстративно, распределение угла наклона по размаху крыла-стабилизатора может иметь предварительно определенные верхнюю и нижнюю границы. Если желательно, может быть выбрано фактическое распределение угла наклона по размаху крыла-стабилизатора, которое лежит между предварительно определенными верхней и нижней границами. Выбор фактического распределения угла наклона на протяжении крыла-стабилизатора может быть осуществлен на основе преобладающего режима полета, например.
Следует отметить, что вышеописанные варианты осуществления просто описаны, чтобы иллюстрировать возможные реализации настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение ими. Вместо этого, множество модификаций и разновидностей настоящих вариантов осуществления являются возможными и должны, следовательно, также рассматриваться как часть изобретения.
В качестве примера, ассиметричное крыло-стабилизатор 500 на фиг. 5 показано с постоянно длиной 550 хорды. Однако, ассиметричное крыло-стабилизатор 550 может быть сужающимся, если желательно. Аналогично, крыло-стабилизатор 600 на фиг. 6 показано сужающимся. Однако, крыло-стабилизатор 600 может иметь постоянную длину хорды, если желательно.
В качестве другого примера, крылья-стабилизаторы 200, 300, 400, 500, 600 на фиг. 2-6 показаны с предварительно определенной стреловидностью. Если желательно, крылья-стабилизаторы 200, 300, 400, 500, 600 могут иметь различную стреловидность. Например, крылья-стабилизаторы 200, 300, 400, 500, 600 могут иметь большую стреловидность или меньшую стреловидность по сравнению с показанной на фиг. 2-6.
Кроме того, нижняя граница для абсолютного значения ненулевой кривизны линии 240 четвертей хорд крыла-стабилизатора 200 на чертеже была задана как 0,2 (т.е., |d2/dY2 (f(Y))| > 0,2), а верхняя граница для абсолютного значения ненулевой кривизны линии 240 четвертей хорд была задана как 4 (т.е., |d2/dY2 (f(Y))| < 4).
Однако, нижняя граница для абсолютного значения ненулевой кривизны линии 240 четвертей хорд может быть выбрана больше или меньше 0,2. Аналогично, верхняя граница для абсолютного значения ненулевой кривизны линии 240 четвертей хорд может быть выбрана больше или меньше 4. Если желательно, нижняя и верхняя границы для абсолютного значения ненулевой кривизны линии 240 четвертей хорд могут быть выбраны на основе формы центральных линий концевых завихрений винта.
Аналогично, абсолютное значение ненулевой кривизны линии 240 четвертей хорд может иметь верхний предел на основе расстояния от центральной линии 230, и коэффициент, на который верхний предел уменьшается, может быть коэффициентом A, который может быть выбран из интервала ]0; B[, при этом B является верхней границей для абсолютного значения ненулевой кривизны линии 240 четвертей хорд. Например, абсолютное значение ненулевой кривизны линии 240 четвертей хорд может быть меньше B - (B-C)*|Y|, при этом B ϵ [1; 4] и C ϵ [0; 1] (т.е., |d2/dY2 (f(Y))| < B - (B-C)*|Y|).
Список ссылочных позиций
100 винтокрылый летательный аппарат
102 несущий винт
102a, 102b, 102c, 102d, 102e лопасти винта
103 центр несущего винта
103a ось колонки несущего винта
104 фюзеляж
104a кабина
107 нос фюзеляжа
108 носовая область
109 хвостовая область
121 хвостовая балка
122 хвостовой винт
130 центральная линия
131 киль
132 руль направления
133 хвостовое крыло, крыло-стабилизатор
136 передняя кромка
137 задняя кромка
138 концевая аэродинамическая поверхность
160 конец крыла
200 крыло-стабилизатор
210 передняя кромка
220 задняя кромка
230 центральная линия
240 линия четвертей хорд
250 длина хорды
255 размах крыла
257 размах полукрыла (левое полукрыло)
258 размах полукрыла (правое полукрыло)
260 конец крыла
270 расстояние
272, 274, 276, 278 точки на линии четвертей хорды
282 расстояние, составляющее 10% размаха крыла
284 расстояние, составляющее 30% размаха крыла
286 расстояние, составляющее 50% размаха крыла
288 расстояние, составляющее 70% размаха крыла
290 прямая линия
300 крыло-стабилизатор
310 передняя кромка
320 задняя кромка
330 центральная линия
340 линия четвертей хорд
360, 370, 380 центральная линия концевых завихрений винта
400 крыло-стабилизатор
410 передняя кромка
420 задняя кромка
430 центральная линия
440 линия четвертей хорд
450 длина хорды
457 конец крыла
460, 470, 480 центральная линия концевых завихрений винта
500 крыло-стабилизатор
502 правое полукрыло
504 левое полукрыло
510 передняя кромка
520 задняя кромка
530 центральная линия
540 линия четвертей хорд
550 длина хорды
555 размах крыла
560, 570, 580 центральная линия концевых завихрений винта
600 крыло-стабилизатор
610 передняя кромка
620 задняя кромка
630 центральная линия фюзеляжа
635 центральная линия крыла
640 линия четвертей хорд
650 длина хорды
660, 670, 680 центральная линия концевых завихрений винта
X продольная ось, ось длины
Y поперечная ось, боковая ось, ось ширины
Z вертикальная ось, ось высоты
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтокрылый беспилотный летательный аппарат тандемной схемы | 2021 |
|
RU2771195C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| ЛОПАСТЬ ВИНТА, ВИНТ, ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ | 2013 |
|
RU2524757C1 |
| ГИБРИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВРАЩАЮЩЕЙСЯ НЕСУЩЕЙ ПОВЕРХНОСТЬЮ | 2012 |
|
RU2522373C2 |
| Винтокрылый летательный аппарат | 2019 |
|
RU2720746C1 |
| СКОРОСТНОЙ ТУРБОВЕНТИЛЯТОРНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629475C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| ВИНТОКРЫЛ | 2017 |
|
RU2673754C2 |
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
| ГИБРИДНОЕ ВОЗДУШНОЕ СУДНО | 1996 |
|
RU2160689C2 |
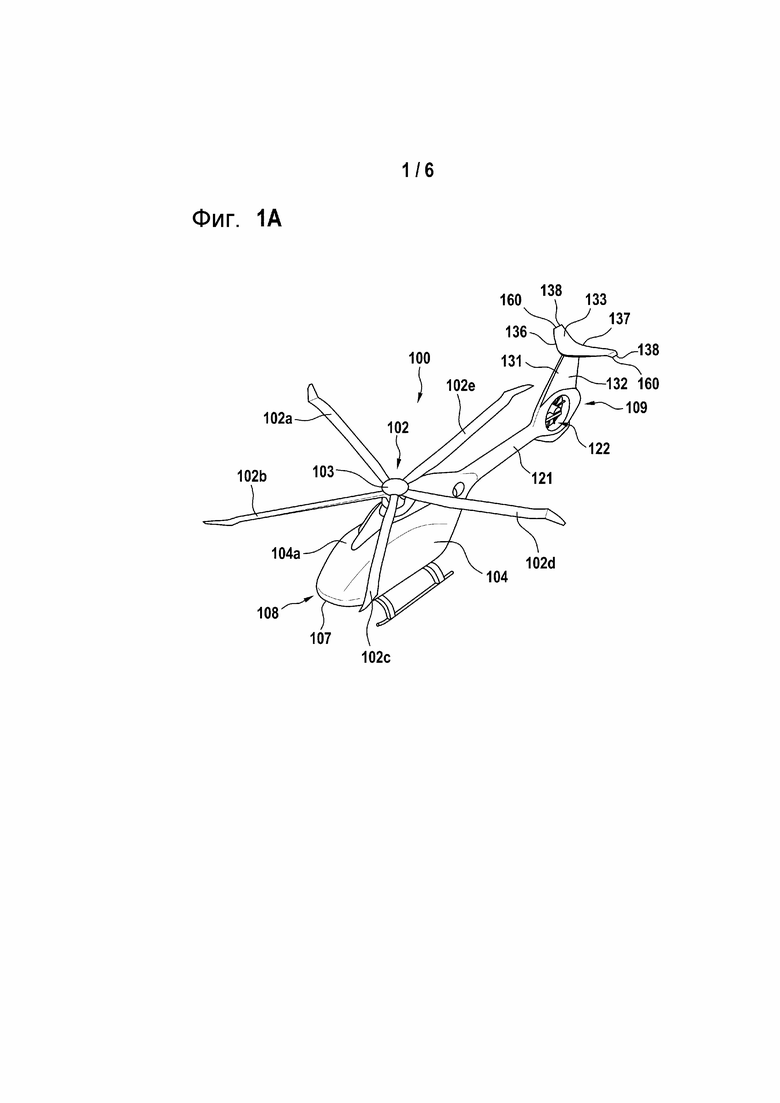


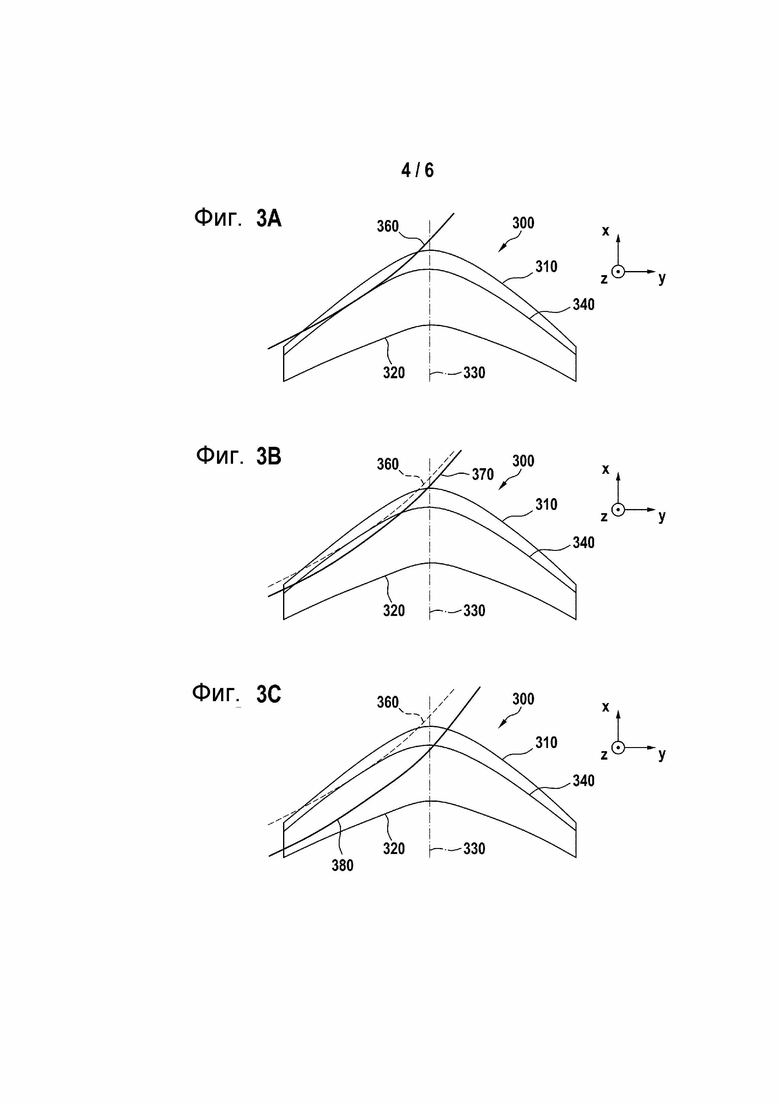
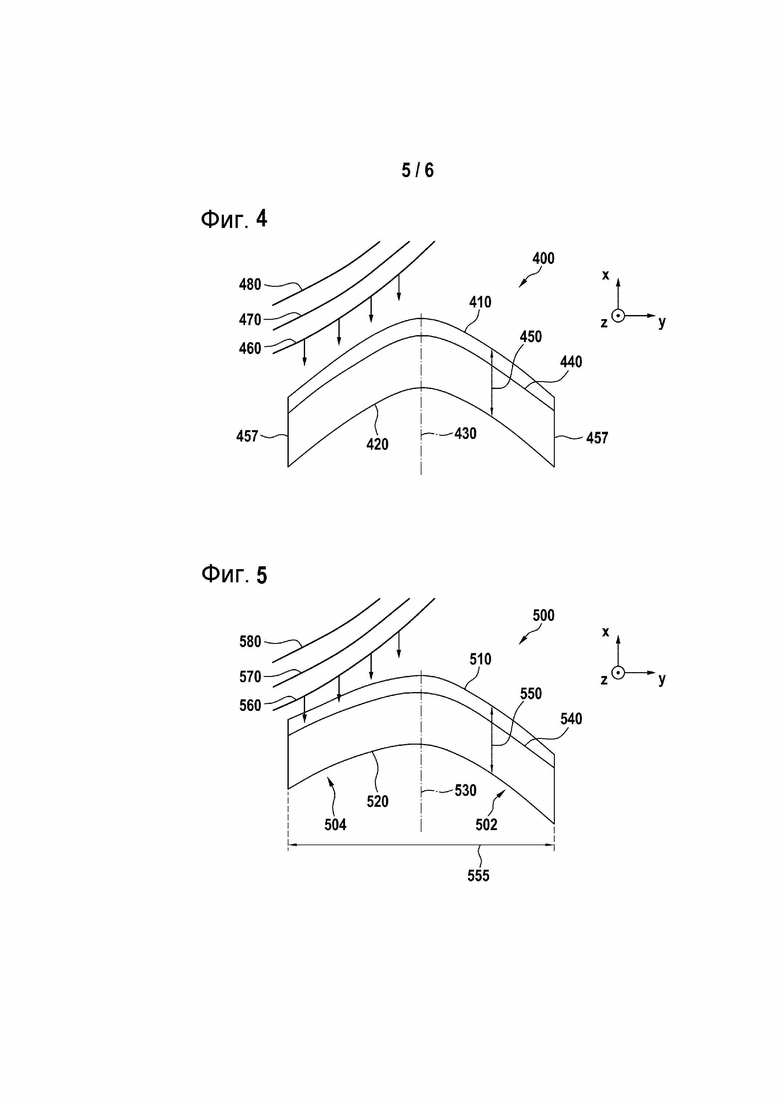
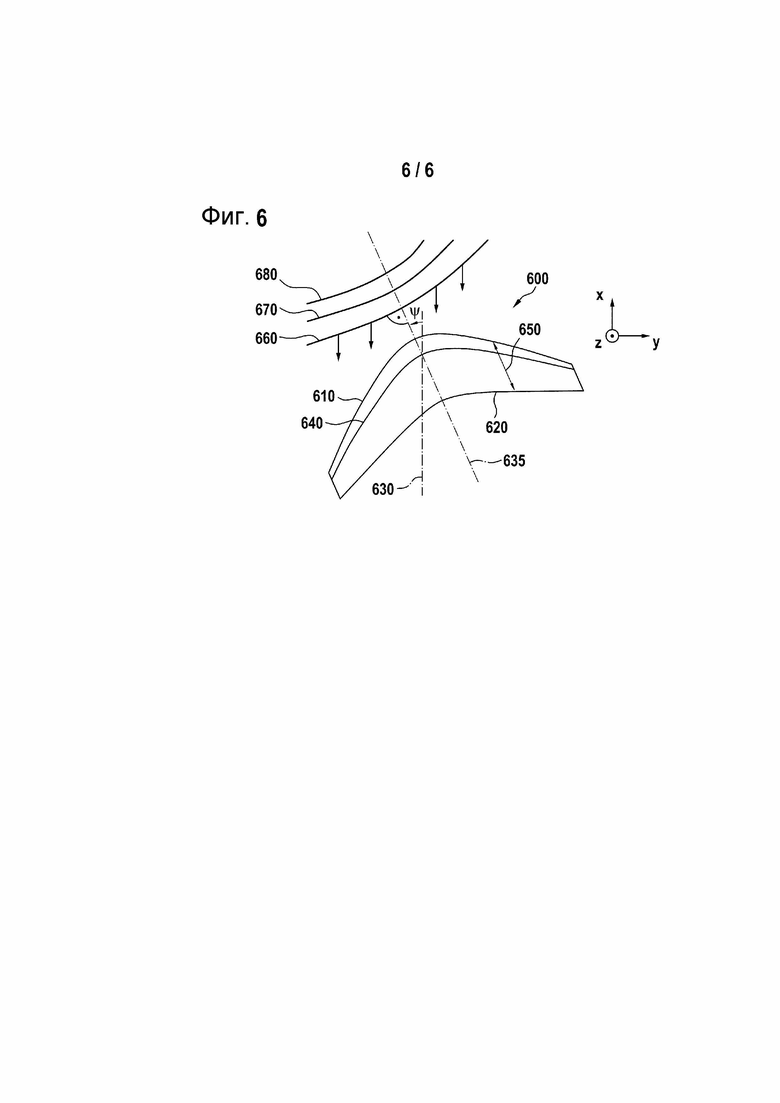
Изобретение относится к области авиации, в частности к конструкциям винтокрылых летательных аппаратов. Винтокрылый летательный аппарат с фюзеляжем имеет центральную линию 230, по меньшей мере один несущий винт, который формирует завихрения во время работы, и крыло-стабилизатор 200. Крыло-стабилизатор 200 имеет форму в плане, которая уменьшает неустойчивые аэродинамические нагрузки, вызванные спутной струей по меньшей мере одного несущего винта. В частности, крыло-стабилизатор 200 может быть снабжено левым концом 260 крыла, правым концом 260 крыла, линией 240 четвертей хорд с ненулевой кривизной, так что взаимодействие между завихрениями, формируемыми по меньшей мере одним несущим винтом, и линией 240 четвертей хорд распределяется по времени, передней кромкой 210, которая является дугообразной, и задней кромкой 220, которая является дугообразной. Обеспечивается улучшение управляемости и устойчивости полета. 15 з.п. ф-лы, 10 ил., 3 табл.
1. Винтокрылый летательный аппарат (100), содержащий:
фюзеляж (104), имеющий центральную линию (130);
по меньшей мере один несущий винт (102), который формирует завихрения (460, 470, 480) во время действия; и
крыло-стабилизатор (133), которое соединено с фюзеляжем (104);
отличающийся тем, что:
крыло-стабилизатор (133, 400) снабжено:
левым концом (160, 457) крыла,
правым концом (160, 457) крыла,
линией (440) четвертей хорд с ненулевой кривизной, причем ненулевая кривизна линии (440) четвертей хорд ведет к уменьшенным неустойчивым аэродинамическим нагрузкам, вызванным спутной струей по меньшей мере одного несущего винта (102) на крыле-стабилизаторе (133, 400), так что взаимодействие между завихрениями (460, 470, 480), формируемыми по меньшей мере одним несущим винтом (102), и линией (440) четвертей хорд распределяется по времени,
передней кромкой (410), которая является дугообразной, и
задней кромкой (420), которая является дугообразной.
2. Винтокрылый летательный аппарат (100) по п. 1, в котором фюзеляж (104) продолжается в продольном направлении (X) между носовой областью (108) и хвостовой областью (109), и при этом линия четвертей хорд крыла-стабилизатора (133) находится ближе к хвостовой области (109) по меньшей мере на одном из левого или правого концов (160) крыла, чем центральная линия (130) фюзеляжа (104).
3. Винтокрылый летательный аппарат (100) по п. 1, в котором фюзеляж (104) продолжается в продольном направлении (X) между носовой областью (108) и хвостовой областью (109), и при этом линия четвертей хорд крыла-стабилизатора (133) находится ближе к носовой области (108) по меньшей мере на одном из левого или правого концов (160) крыла, чем центральная линия (130) фюзеляжа (104).
4. Винтокрылый летательный аппарат (100) по любому из предшествующих пунктов, в котором абсолютное значение ненулевой кривизны линии (240) четвертей хорд больше 0,2, при этом линия (240) четвертей хорд является функцией, а кривизна является второй производной функции.
5. Винтокрылый летательный аппарат (100) по п. 4, в котором абсолютное значение ненулевой кривизны линии (240) четвертей хорд меньше 4.
6. Винтокрылый летательный аппарат (100) по любому из предшествующих пунктов, в котором ненулевая кривизна линии (240) четвертей хорд изменяется от первого значения на первом расстоянии от центральной линии (230) фюзеляжа (104) до второго значения на втором расстоянии от центральной линии (230) фюзеляжа (104), так что ненулевая кривизна линии (240) четвертей хорд является непостоянной между первым и вторым расстоянием от центральной линии (230) фюзеляжа (104).
7. Винтокрылый летательный аппарат (100) по любому из предшествующих пунктов, в котором крыло-стабилизатор (200) имеет размах (257, 258) полукрыла между центральной линией (230) и концом крыла из левого или правого концов (260) крыла, при этом первая, вторая, третья и четвертая точки (272, 274, 276, 278) расположены на линии (240) четвертей хорд на первом, втором, третьем и четвертом расстояниях (282, 284, 286, 288) от центральной линии (230) фюзеляжа, соответственно, при этом первое, второе, третье и четвертое расстояния (282, 284, 286, 288) составляют 10%, 30%, 50% и 70% размаха (257, 258) полукрыла, соответственно, при этом ненулевая кривизна линии (240) четвертей хорд является ненулевой между первой и четвертой точками (272, 278), и причем прямая линия (290) между первой и четвертой точками (272, 278) имеет пятое расстояние (270) от линии (240) четвертей хорд между второй и третьей точками (274, 276), которое больше 2% размаха (257, 258) полукрыла.
8. Винтокрылый летательный аппарат (100) по любому из предшествующих пунктов, в котором линия (240) четвертей хорд является симметричной центральной линии (230) фюзеляжа.
9. Винтокрылый летательный аппарат (100) по любому из предшествующих пунктов, в котором крыло-стабилизатор (133) установлено по меньшей мере на одном из фюзеляжа (104), хвостовой балки (121), которая присоединена к фюзеляжу (104), или вертикального киля (131), который присоединен к хвостовой балке (121).
10. Винтокрылый летательный аппарат (100) по любому из предшествующих пунктов, в котором крыло-стабилизатор (400) имеет постоянную длину (450) хорды между левым и правым концами (457) крыла для крыла-стабилизатора (400).
11. Винтокрылый летательный аппарат (100) по любому из пп. 1-9, в котором крыло-стабилизатор (200) имеет длину (250) хорды, которая уменьшается от центральной линии (230) фюзеляжа к левому и правому концам (260) крыла для крыла-стабилизатора (200).
12. Винтокрылый летательный аппарат (100) по любому из пп. 1-7, в котором крыло-стабилизатор (500) дополнительно содержит:
левое полукрыло (504), имеющее первую стреловидность; и
правое полукрыло (502), имеющее вторую стреловидность, которая отличается от первой стреловидности.
13. Винтокрылый летательный аппарат (100) по п. 12, в котором левое полукрыло (504) имеет линию (540) четвертей хорд с первой кривизной, а правое полукрыло (502) имеет линию (540) четвертей хорд со второй кривизной, и при этом вторая кривизна отличается от первой кривизны.
14. Винтокрылый летательный аппарат (100) по п. 12, в котором левое полукрыло (504) имеет первую длину, а правое полукрыло (502) имеет вторую длину, которая отличается от первой длины.
15. Винтокрылый летательный аппарат (100) по любому из предшествующих пунктов, в котором крыло-стабилизатор (133) дополнительно содержит концевые аэродинамические поверхности (138).
16. Винтокрылый летательный аппарат (100) по любому из предшествующих пунктов, в котором винтокрылый летательный аппарат выполнен в виде вертолета.
| EP 2899118 B1, 16.01.2019 | |||
| СИСТЕМА УСКОРЕНИЯ ИОНОВ ДЛЯ АДРОННОЙ ТЕРАПИИ | 2005 |
|
RU2409917C2 |
| WO 2009155584 A1, 23.12.2009 | |||
| Веретено двойного кручения | 1948 |
|
SU81159A1 |
| WO 1999067130 A1, 29.12.1999. | |||

