Область техники, к которой относится изобретение
Настоящее изобретение относится к турбореактивному двигателю, к реактивному соплу такого двигателя и к приводу на основе синхронизированных гидроцилиндров, который, в частности, может использоваться для одновременного перемещения подвижных створок реактивных сопел турбореактивного двигателя с регулируемым выходным сечением. Изобретение может также использоваться и для других целей, например, для перемещения кольца управления поворотными лопатками в неподвижном направляющем аппарате компрессора газовой турбины.
Уровень техники
В известном реактивном сопле с регулируемым выходным сечением перемещение подвижных створок реализуется с помощью системы гидроцилиндров, воздействующих на управляемые створки, которые, в свою очередь, перемещают ведомые створки. Управляемые створки перемещаются тягами, шарнирно соединенными со штоками гидроцилиндров или с общим управляющим кольцом, на которое воздействуют гидроцилиндры. Механические средства обеспечивают синхронизацию управляемых створок независимо от ведомых створок, которые не являются управляемыми. Такое реактивное сопло с механической системой автоматической синхронизации обладает недостатками в отношении себестоимости и массы, а также в связи с наличием взаимно трущихся элементов в горячей среде.
Другое решение заключается в том, чтобы обеспечить синхронное перемещение створок с устранением трения и тем более заклинивания между створками, которое потребовало бы повышенного усилия воздействия и могло бы вызывать повреждения, сказывающиеся на сроке службы створок, за счет того, что функция синхронизации переносится на уровень гидроцилиндров.
Однако известно, что из-за неизбежного разброса характеристик практически невозможно добиться одновременного перемещения штоков гидроцилиндров даже при управлении гидроцилиндрами от общего распределителя гидравлической текучей среды.
Для решения этой проблемы в патентном документе Франции №2756329 было предложено выполнение механической связи между поршнями гидроцилиндров с помощью зубчатого венца, зацепляющегося с шестернями, каждая из которых соединена с поршнем гидроцилиндра передачей "винт-гайка", преобразующей поступательное движение поршня в поворот шестерни.
Такое устройство синхронизации позволяет надежно обеспечить одновременное смещение поршней гидроцилиндров. Однако оно требует использования зубчатого венца, способного передавать необходимые усилия для компенсации расхождений в ходе поршней, то есть относительно массивного и громоздкого кольца.
Сущность изобретения
Основная задача, на решение которой направлено настоящее изобретение, заключается в создании привода на основе синхронизированных гидроцилиндров, свободного от указанного недостатка и предназначенного для использования в реактивных соплах турбореактивного двигателя.
В соответствии с изобретением решение поставленной задачи достигается за счет создания привода на основе синхронизированных гидроцилиндров, содержащего:
гидравлическую управляющую систему,
ведущий гидроцилиндр, содержащий цилиндр и поршень, определяющий в цилиндре две полости, связанные с гидравлической управляющей системой,
по меньшей мере, один ведомый гидроцилиндр, содержащий цилиндр и поршень, определяющий в цилиндре две полости, из которых, по меньшей мере, первая полость связана с выходом распределителя, причем указанный распределитель связан с гидравлической управляющей системой и содержит управляющий орган, положение которого определяет давление в первой полости ведомого гидроцилиндра, и
механическое передаточное устройство для передачи перемещения поршня ведущего гидроцилиндра на управляющий орган распределителя, связанного с ведомым гидроцилиндром таким образом, что перемещение поршня ведомого гидроцилиндра автоматически следует за перемещением поршня ведущего гидроцилиндра на основе команды положения, поступающей от управляющего органа распределителя, связанного с ведомым гидроцилиндром.
Следовательно, на уровне каждого ведомого гидроцилиндра заданное положение ведущего гидроцилиндра, передаваемое механическими средствами, воздействует не непосредственно на поршень ведомого гидроцилиндра, а на распределитель, связанный с ведомым гидроцилиндром и действующий как гидравлический усилитель механического сигнала заданного положения. За счет этого механическое устройство передачи, служащее для перемещения поршня ведущего гидроцилиндра, может обеспечиваться более легкими средствами.
Согласно особенности привода по изобретению это механическое передаточное устройство содержит: устройство преобразования поступательного перемещения поршня ведущего гидроцилиндра во вращательное движение ведущей шестерни, устройство передачи вращательного движения ведущей шестерни на ведомую шестерню и устройство преобразования вращательного движения ведомой шестерни в поступательное перемещение управляющего органа распределителя (т.е. его золотника), связанного с одним или каждым ведомым гидроцилиндром.
В оптимальном варианте устройство преобразования вращательного движения ведомой шестерни в поступательное перемещение управляющего органа образовано первой передачей "винт-гайка", в которой винт связан с управляющим органом (золотником). Предусмотрена также вторая передача "винт-гайка" для преобразования поступательного перемещения поршня ведомого гидроцилиндра, действующего как гайка, во вращательное движение винта второй передачи "винт-гайка". При этом золотник и винт второй передачи "винт-гайка" свинчены друг с другом таким образом, что вращение золотника и винта взаимно компенсируются и золотник не совершает поступательного перемещения, когда перемещение поршня ведущего гидроцилиндра, передаваемое на золотник, и перемещение поршня ведомого гидроцилиндра синхронизированы.
Устройство передачи вращательного движения ведущей шестерни на ведомую шестерню выполнено, например, в виде гибкой линейной передачи на опорах качения, несущей зубчатые рейки, с которыми зацепляются шестерни.
Один или каждый ведомый гидроцилиндр может содержать первую полость, связанную с распределителем, который относится к ведомому гидроцилиндру, и вторую полость, которая гидравлически соединена с полостью ведущего гидроцилиндра.
В варианте осуществления с каждым ведомым гидроцилиндром связан двухходовой распределитель, связанный с первой и второй полостями ведомого гидроцилиндра.
В том случае, когда поршни гидроцилиндров подсоединены к одному управляющему кольцу, привод предпочтительно содержит один ведущий гидроцилиндр и два ведомых гидроцилиндра. Если есть необходимость в дополнительном гидроцилиндре, этот дополнительный гидроцилиндр может представлять собой сопровождающий гидроцилиндр, подсоединенный к гидравлической управляющей системе параллельно ведущему гидроцилиндру. При этом присутствие одного ведущего и двух ведомых гидроцилиндров достаточно для обеспечения желаемой синхронизации.
Изобретение охватывает также вариант выполнения реактивного сопла турбореактивного двигателя, которое имеет регулируемые выходное сечение и ориентацию, определяемые положением подвижных створок, и которое содержит привод, выполненный в соответствии с вариантами, предусматривающими наличие устройства регулируемого смещения.
Изобретение охватывает, кроме того, альтернативный вариант выполнения реактивного сопла турбореактивного двигателя, которое имеет регулируемое выходное сечение, определяемое положением подвижных створок, и которое содержит привод, выполненный в соответствии с любым из остальных рассмотренных вариантов.
Далее, изобретение охватывает турбореактивный двигатель, содержащий вышеописанный привод на основе синхронизированных гидроцилиндров.
Перечень фигур чертежей
Изобретение будет более понятным из нижеследующего подробного описания, не ограничивающего объем изобретения и содержащего ссылки на прилагаемые чертежи, на которых:
фиг.1 изображает структурную схему привода по изобретению в примере его использования для створок реактивного сопла регулируемого сечения,
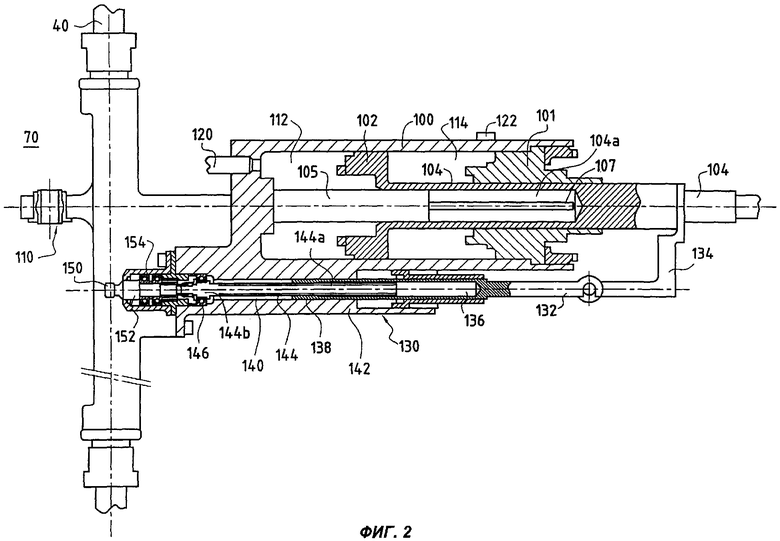
фиг.2 изображает на виде с частичным разрезом ведущий гидроцилиндр привода по изобретению,
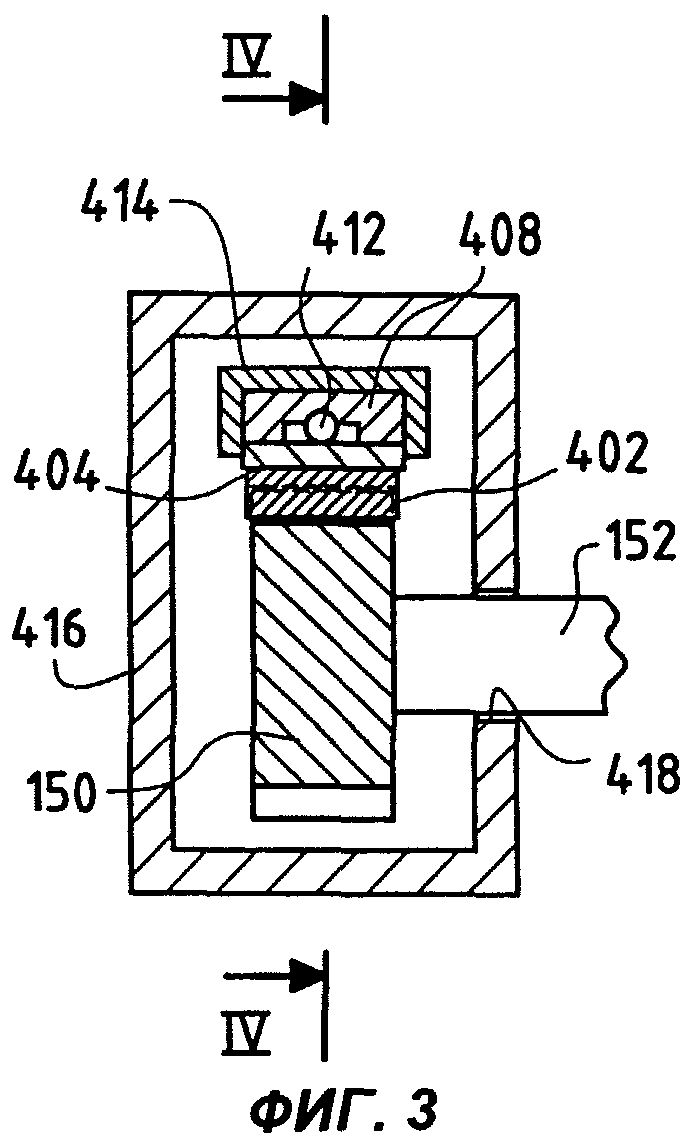
фиг.3 изображает в увеличенном масштабе часть гидроцилиндра по фиг.2,
фиг.4 изображает в частичном виде разрез по плоскости IV-IV на фиг.3,
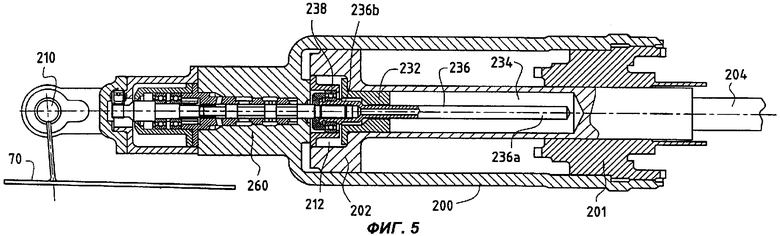
фиг.5 изображает на виде с частичным разрезом ведомый гидроцилиндр привода по фиг.1,
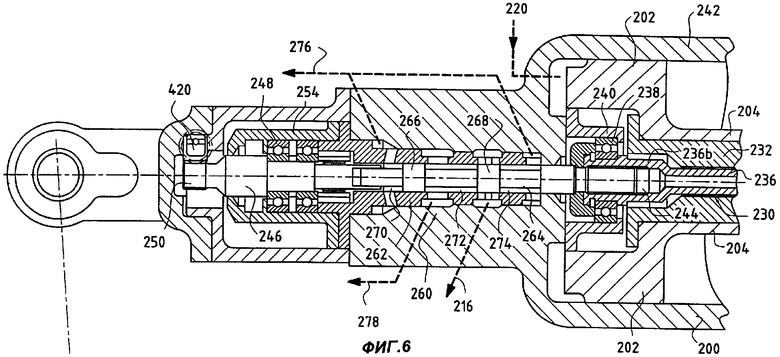
фиг.6 изображает в увеличенном масштабе часть гидроцилиндра по фиг.5,
фиг.7 - это схема, иллюстрирующая принцип действия привода по фиг.1,
фиг.8 - это структурная схема привода по изобретению в примере выполнения для створок векторного реактивного сопла.
Сведения, подтверждающие возможность осуществления изобретения
Данное описание относится в основном к примеру использования изобретения в качестве привода подвижных заслонок или створок, таких как подвижные створки сопла турбореактивного двигателя с регулируемым выходным сечением.
Фиг.1 схематично изображает привод в соответствии с изобретением, содержащий задающий (ведущий) гидроцилиндр 10, два ведомых гидроцилиндра 20, сопровождающий гидроцилиндр 30, механическое передаточное устройство 40 между ведущим и двумя ведомыми гидроцилиндрами и гидравлическую управляющую систему (в виде гидравлического блока 50 управления соплом).
В показанном примере выполнения гидроцилиндры 10, 20 и 30 воздействуют на управляющее кольцо 60, к которому шарнирно присоединены тяги 62, соединяющие управляющее кольцо 60 с подвижными створками 64 сопла. На фиг.1 представлена одна тяга 62 и одна створка 64, причем привод и управляющее кольцо представлены в развертке на плоскость.
Общее число гидроцилиндров выбирают предпочтительно равным трем для образования статической системы. При выборе трех гидроцилиндров один служит ведущим, а два других - ведомыми, т.е. перемещение их поршней зависит от перемещения ведущего гидроцилиндра. Если в системе предусмотрено больше трех гидроцилиндров для того, чтобы обеспечить усилия, требуемые для смещения управляющего кольца без нежелательного увеличения размеров гидроцилиндров, дополнительный гидроцилиндр или гидроцилиндры могут быть сопровождающими гидроцилиндрами (в примере выполнения по фиг.1 предусмотрен один сопровождающий гидроцилиндр). Питание сопровождающего гидроцилиндра или гидроцилиндров производится от гидравлической управляющей системы, параллельно ведущему гидроцилиндру, при этом степень заданной синхронизации может обеспечиваться ведущим гидроцилиндром и двумя ведомыми гидроцилиндрами.
Следует заметить, что привод может использоваться без управляющего кольца, то есть гидроцилиндры могут быть связаны тягами непосредственно со створками или другими органами, которые должны синхронно приводиться в действие.
В примере выполнения, подробно показанном на фиг.1 и 2, ведущий гидроцилиндр 10 содержит цилиндр 100 с поршнем 102, который установлен подвижно по оси цилиндра и жестко соединен со штоком 104, конец которого связан с управляющим кольцом 60 шарниром 106. Этот узел штока 104 с поршнем 102 направляется при движении подшипником 101, плотно закрывающим цилиндр 100. Датчик линейного положения, содержащий корпус 105, связанный с цилиндром 100, и стержень 107, закрепленный в полости 104а штока 104, позволяет измерять положение штока 104 по всей длине рабочего хода гидроцилиндра. Сигнал, вырабатываемый этим датчиком положения, представляет действительное положение подвижных створок и передается на устройство управления конфигурацией сопла. Своим задним концом, противоположным полости для размещения штока 104, цилиндр 100 укреплен на стенке 70 посредством шарнира 110.
Поршень 102 разделяет внутренний объем цилиндра 100 на две полости, 112 и 114. Задняя полость 112 связана с гидравлическим блоком 50 управления сопла гидролинией 120, а передняя полость 114 связана с указанным блоком 50 управления гидролинией 122.
Передача 130 «винт-гайка» преобразует поступательное смещение поршня 102 во вращательное движение (фиг.2). В данной передаче 130 гайка 132 выполнена в виде цилиндрического стержня, один конец которого жестко соединен с лапой 134, жестко соединенной, в свою очередь, со штоком 104 поршня. На другом конце стержня 132 выполнена глухая осевая проточка 136, снабженная резьбой 138, по меньшей мере, на части своей длины. Стержень 132 может скользить в полости 140, образованной в корпусе 142, который жестко связан с корпусом цилиндра 100, например, сформован как одно целое с данным корпусом.
Винт 144 передачи 130 «винт-гайка» имеет концевую часть 144а с резьбой и входит в проточку 136 гайки 132. Другой конец 144b винта, не имеющий резьбы, удерживается в подшипнике 146, установленном в корпусе 142.
Винт 144 приводит во вращение ведущую шестерню 150 внутри корпуса 142. Шестерня 150 может быть установлена непосредственно на конце винта 144 или же, как показано на фиг.2, она может быть установлена на конце стержня 152, который соединен с винтом 144 для совместного вращения, но может смещаться по оси относительно него. Связь между винтом 144 и стержнем 152 для обеспечения их совместного вращения может быть выполнена, например, в виде взаимодействующих плоских участков (лысок) и граней ответной формы, выполненных на частях винта 144 и стержня 152. Для преобразования вращательного движения в поступательное без заклинивания могут использоваться также любые другие механические средства, причем эти средства не обязательно должны быть точно центрированы по оси. Стержень 152 установлен в подшипнике 154 внутри крышки, укрепленной на корпусе 142. Такое решение упрощает установку ведущей шестерни 150.
Ведущая шестерня 150 зацепляется с отрезком зубчатой рейки 402 механического передаточного устройства 40 (фиг.3 и 4).
В примере выполнения по фиг.2 следящая система движения поршня 102 с передачей на шестерню 150 расположена сбоку от цилиндра 100.
В варианте выполнения с использованием, по меньшей мере, одного сопровождающего цилиндра датчик 105 положения может быть установлен по оси сопровождающего цилиндра, и тогда в ведущем цилиндре 100 остается место для размещения по оси передачи 130, как это показано на фиг.1. В этом случае ведущий гидроцилиндр 10 может быть сделан более компактным.
Механическое передаточное устройство 40 в оптимальном варианте образовано гибкой линейной передачей 400 на опорах качения, например, такого типа как передача марки "Teleflex Syneravia" французской фирмы Intertechnique. Гибкая линейная передача содержит гибкую металлическую полосу 404, которая скользит между двумя лентами 406, 408 с опорой на шарики или ролики 410, 412, при этом все устройство заключено в жесткий защитный кожух 414.
На участке взаимодействия с ведущей шестерней 150 кожух 414 и одна лента 406 вырезаны, причем срезанные концы ленты отогнуты внутрь и закрывают полость размещения шариков 410. Отрезок зубчатой рейки 402 жестко прикреплен, например, приварен, к вскрытой части полосы 404 и скользит вместе с ней. Защитная коробка 416 закрывает зубчатую рейку 402, зоны ее соединения с остальной частью линейной передачи 400 и ведущую шестерню 150. Коробка 416 прикреплена к гидроцилиндру 10 и к кожуху 414. Стержень 152, несущий шестерню 150, проходит через подшипник 418, установленный в коробке 416. На фиг.4, как и на фиг.1, механическое передаточное устройство 40 представлено в виде развертки на плоскость.
Каждый ведомый гидроцилиндр 20 (фиг.1, 5 и 6) содержит цилиндр 200 с поршнем 202, который установлен подвижно по оси цилиндра и жестко соединен со штоком 204, который связан с управляющим кольцом 60 шарниром 206. На своем переднем конце цилиндр 200 закрыт подшипником 201 штока, через который плотно проходит шток 204. Своим задним концом, противоположным полости для размещения штока 204, цилиндр 200 укреплен на стенке 70 посредством шарнира 210.
Поршень 202 разделяет внутренний объем цилиндра 200 на две полости, 212 и 214 (фиг.7). Задняя полость 212 связана с гидравлическим блоком 50 управления сопла гидролинией 220, а передняя полость 214 запитывается распределителем 260, выход которого связан с полостью 214 гидролинией 216.
Распределитель 260 (фиг.6) содержит цилиндр 262, внутри которого установлен с возможностью скольжения золотник 264 с поясками 266, 268 на управляющей (золотниковой) тяге, образующими три полости 270, 272, 274. Своими концами распределитель связан гидролинией 276 с выходом ВР низкого давления блока 50 управления, в то время как промежуточная полость распределителя связана гидролинией 278 с выходом HP высокого давления блока 50 управления. Таким образом, в промежуточной полости распределителя создается такое же давление, как и давление в полости 114 ведущего гидроцилиндра, служащее опорным давлением. В зависимости от осевого положения золотника 264 распределитель 260 устанавливает сообщение полости 214 цилиндра либо с гидролинией 276, либо с гидролинией 278.
Кроме того, полость 214 гидроцилиндра 20 связана посредством двух параллельных, включенных встречно предохранительных клапанов 280, 282 с гидролинией 222, идущей к блоку 50 управления (фиг.7). За счет этого давление в полости 214 ведомого гидроцилиндра не может слишком отклоняться от величины давления в полости 114, служащего опорным давлением. В противном случае возникал бы риск «скручивания» сопла.
Передача 230 "винт-гайка" (фиг.5, 6) преобразует поступательное движение поршня 202 во вращательное движение. В этой системе гайка 232 жестко соединена с поршневым штоком 204 и входит в продольную глухую проточку 234, которая выполнена в штоке 204 и открыта к его заднему концу. Гайка 232 занимает только часть проточки 234 вблизи ее открытого конца.
Винт 236 передачи 230 имеет концевой участок 236а с резьбой, который ввинчен в гайку 232 и может проходить дальше в проточку 234 (фиг.5). На заднем концевом участке 236b без резьбы винт 236 поддерживается в подшипнике 238, установленном в опоре 240, жестко прикрепленной к корпусу 242 цилиндра 200.
Винтовая пара 232-236 передачи 230 "винт-гайка" идентична винтовой паре 132-144 передачи 130 "винт-гайка" и имеет то же назначение, то есть посредством этих пар поступательное движение поршней ведущего и ведомого цилиндров преобразуется во вращательное движение винтов 144 и 236.
На своем концевом участке 236b винт 236 имеет осевую глухую проточку 244 с резьбой, в которую ввинчен резьбовой конец золотника 264 распределителя 260 (фиг.6). Таким образом, золотник 264 и винт 236 образуют еще одну передачу "винт-гайка", в которой гайка образована винтом 236 передачи 230 "винт-гайка". В этой третьей передаче 264-236 "винт-гайка" винтовой шаг имеет то же направление, что и в передаче 230.
На своем другом конце золотник 264 соединен со стержнем 246 с возможностью их совместного вращения, но с возможностью свободного относительного смещения по оси. Связь между управляющим золотником 264 и концом стержня 246 может быть выполнена, например, в виде взаимодействующих плоских участков (лысок) и граней ответной формы, выполненных на соответствующих частях элементов 264, 246. Для преобразования вращательного движения в поступательное без заклинивания могут использоваться также любые другие механические средства, причем эти средства не обязательно должны быть точно центрированы по оси. На своем другом конце стержень 246 несет ведомую шестерню 250. Стержень 246 установлен в подшипнике 248 внутри крышки 254, укрепленной на корпусе 252.
Ведомая шестерня 250 зацепляется с отрезком зубчатой рейки 420 механического передаточного устройства 40. Установка отрезка зубчатой рейки 420 и его связь с ведомой шестерней 250 осуществляются таким же образом, как это было описано выше применительно к отрезку зубчатой рейки 404 и ведущей шестерне 150.
Сопровождающий гидроцилиндр 30 (фиг.1) содержит цилиндр 300 с поршнем 302, который установлен подвижно по оси цилиндра и жестко соединен со штоком 304, связанным с управляющим кольцом 60 шарниром 306. Своим задним концом, противоположным полости для размещения штока 304, цилиндр 300 укреплен на стенке 70 посредством шарнира (не показано).
Поршень 302 разделяет внутренний объем цилиндра 300 на две полости, 312 и 314. Задняя полость 312 связана с гидравлическим блоком 50 управления гидролинией 320, а передняя полость 314 связана с гидравлическим блоком 50 управления гидролинией 322.
Гидролинии 120, 220, 320 совместно подсоединены к выходу S0 блока 50, а гидролинии 122, 222 и 322 совместно подсоединены к другому выходу (S1) блока 50.
Таким образом, ведущий гидроцилиндр 10 и сопровождающий гидроцилиндр 30 питаются текучей средой параллельно. Что же касается ведомых гидроцилиндров 20, их полости 212 питаются параллельно с полостями 112 и 312 гидроцилиндров 10 и 30, а их полости 214 питаются от распределителя 260.
Далее будет описана работа привода по изобретению со ссылкой на фиг.7, которая изображает принципиальную схему этой системы (за исключением сопровождающего цилиндра 30) и некоторые элементы блока 50.
Насос 502, называемый насосом сопла, создает высокое давление HP, предназначенное для приведения в действие цилиндров для воздействия на подвижные створки с целью увеличения (открытия) или уменьшения (закрытия) выходного сечения сопла, через которое выводятся газы. В данном случае предусмотрено использование специального насоса 502 для создания уровня высокого давления, который значительно превышает уровень высокого давления, обеспечиваемого насосом 504 высокого давления общей гидравлической системы турбореактивного двигателя.
Высокое давление HP подается на выход S0 или выход S1 с помощью сервоклапана 500, в котором давление HP подано на его вход 512, а выходы 514, 516 связаны с выходами S0, S1. Можно использовать сервоклапан с двумя ступенями 500а, 500b. Высокое давление HP коммутируется второй ступенью 500b по команде первой ступени 500а. На входы 518, 520 ступени 500а поданы также высокое давление hp из контура насоса 504 и низкое давление ВР от насоса 522 низкого давления общей гидравлической системы. Первая ступень управляется сигналом S, например, электрическим сигналом управления гидравлическим распределителем.
Высокое и низкое давления HP, ВР от выходов управляющего блока 50 направляются к распределителям ведомых гидроцилиндров по гидролиниям 278 и 276 соответственно.
Подача высокого давления HP на выход S0 по команде в виде сигнала S вызывает, например, открытие сопла; при этом на выход S1 подается низкое давление ВР. Высокое давление HP подается параллельно в полости 112, 212 и 312 гидроцилиндров 10, 20, 30, в то время как их полости 114, 214, 314 находятся под низким давлением ВР. При этом уровни давления HP и ВР модулируются в зависимости от передаваемых соплом усилий посредством сервоклапана 500 (применительно к полостям 112 и 114, 212, 312 и 314) и распределителей 260 (применительно к полостям 214). Подача давления HP или ВР в полости 114, 214 управляется рассогласованием положения между ведущим и ведомыми цилиндрами, то есть погрешностью регулирования.
Перемещение штока 104 ведущего гидроцилиндра копируется в каждом ведомом гидроцилиндре 20 с помощью передачи 130 "винт-гайка", ведущей шестерни 150, гибкой линейной передачи 400 и ведомой шестерни 250.
Вращение ведомой шестерни 250 передается посредством стержня 246 на золотник 264 управления распределителя 260. За счет резьбы осевой проточки 244 винта 236 золотник 264 образует передачу "винт-гайка", которая преобразует вращение золотника в его поступательное перемещение таким образом, что давление ВР подается в полость 214 цилиндра.
При перемещении поршня 202 цилиндра его поступательное движение преобразуется во вращательное движение винта 236.
Любая десинхронизация поступательного движения поршней 102, 202 преобразуется в осевое смещение золотника 264, который тем самым модулирует давление, подаваемое в полость 214 для оперативной компенсации этой десинхронизации.
Направление воздействия пояска 268 распределителя 260 под влиянием давления, подаваемого гидролинией 216, выбирают в соответствии с направлением шага винта 244 и 236 для того, чтобы обратная связь в следящей системе осуществлялась в нужном направлении с учетом уровня давления в гидролиниях 276 и 278.
Шаг винта для пары золотник 264 - проточка 244 выбирают с учетом шага винта для пары винт 236 - гайка 232 таким образом, что когда перемещение поршней 102 и 202 синхронизировано, вращение винта 236, образующего винт обратной связи, компенсирует вращение золотника 264, и последний остается в неподвижном положении, т.е. в равновесном состоянии в отношении поступательного движения.
Требуемый шаг резьбы проточки 244 может быть определен следующим образом.
Максимальное гидравлическое усиление золотника должно достигаться тогда, когда рассогласование положения между ведомым и ведущим гидроцилиндрами достигает определенной максимальной величины, которая является функцией механической способности сопла выдерживать «деформацию» без заклинивания и без риска необратимой деформации частей, а также способности самолета выдерживать реактивную тягу, смещенную относительно его оси.
На основе величины максимального гидравлического усиления распределителя 260, которая может быть переведена в максимальный ход золотника 264 (составляющий, например, 1 мм), и величины допустимого рассогласования синхронизации между гидроцилиндрами, которая может быть переведена в проценты хода поршней (например, 2%), может быть установлен шаг резьбы проточки 244 с учетом того, что винтовой шаг передач 130 и 230 "винт-гайка" выбирается из условия обратимости осуществляемого ими преобразования поступательного движения во вращательное.
Кроме того, для зубчатой рейки 402 выбирают относительно длинный ход, например, составляющий несколько сантиметров, с тем, чтобы снизить влияние зазоров или изгибов на уровне механического передаточного устройства 40. Этот ход позволяет определить диаметр шестерен 150 и 250.
Подача высокого давления HP на выход S1 по команде в форме сигнала S вызывает закрытие сопла, при этом на выход S0 подается низкое давление ВР.
Синхронизация смещения поршней гидроцилиндров 10 и 20 осуществляется аналогично описанному выше.
На фиг.7 стрелками показаны направления движения элементов и потоков текучей среды вслед за втягиванием поршня 104 ведущего гидроцилиндра при «правом» шаге всех винтов.
Таким образом, привод в соответствии с изобретением имеет ту отличительную особенность, что механическое передаточное устройство, которое копирует перемещение ведущего гидроцилиндра, не подвергается значительным нагрузкам. Это передаточное устройство копирует перемещение ведущего гидроцилиндра и передает его на управляющий орган распределителя, который действует как гидравлический усилитель. Действительно, ведомая шестерня вращается совместно с органом управления (золотником) распределителя, который не имеет непосредственной кинематической связи с гайкой, жестко соединенной с поршнем ведомого гидроцилиндра.
За счет этого механическое передаточное устройство может быть значительно более легким по сравнению с устройствами, в которых используются зубчатые венцы, находящиеся в механической кинематической связи с поршнями гидроцилиндров.
Кроме того, оказывается достаточным управлять, посредством распределителя, давлением только в одной из полостей ведомых гидроцилиндров. Управление давлением в двух полостях ведомых гидроцилиндров посредством распределителей, приводимых от ведущего гидроцилиндра, может быть предусмотрено, но не является необходимым.
Использование гибкой линейной передачи на опорах качения является выгодным из-за ее небольшого веса, способности обеспечивать эффективную механическую синхронизацию без влияния погрешностей изготовления и теплового расширения, а также благодаря ее долговечности. Возможно также использование других средств механической трансмиссии с зубчатым зацеплением с шестернями, таких как зубчатый венец или гибкие валы с бесконечными винтами. При этом благодаря невысокому требуемому усилию синхронизации становится возможным уменьшить размеры этих элементов.
В приведенном выше описании показано использование системы по изобретению применительно к подвижным створкам реактивных сопел переменного сечения.
Как уже было указано, изобретение не ограничивается этим применением и может использоваться для управления гидроцилиндрами подвижных органов не только створок, но и других компонентов, которые должны смещаться синхронно, или для управления створками поворотных реактивных сопел ("сопел с управляемым вектором тяги").
В этом последнем случае створки поворотного реактивного сопла управляются с помощью трех гидроцилиндров, синхронизированных, по меньшей мере, механически и оснащенных двумя устройствами регулируемого смещения, которые управляются электрическими средствами и воздействуют на положение двух соответствующих цилиндров для того, чтобы изменить это положение относительно управляемого положения третьего цилиндра с целью ориентирования сопла.
Этот пример выполнения схематично представлен на фиг.8. Одинаковые элементы на фиг.1-7 и 8 обозначены одними и теми же позициями.
Привод по фиг.8 содержит ведущий гидроцилиндр 10 и два ведомых гидроцилиндра 20 с механическим передаточным устройством 40 между ведущим и ведомыми цилиндрами. Гидроцилиндры 10, 20 и механическое передаточное устройство 40 аналогичны описанным выше.
Устройство 71 регулируемого смещения встроено между механическим передаточным устройством 40 и каждым ведомым гидроцилиндром 20. На фиг.8 подробно показано только одно устройство 71 регулируемого смещения.
Устройство 71 регулируемого смещения содержит зубчатый венец 702, ось которого совпадает с осью золотника 264 распределителя 260 соответствующего ведомого гидроцилиндра 20. По своей наружной боковой поверхности венец 702 зацепляется с зубчатой рейкой 420 передаточного устройства 40.
По своей внутренней боковой поверхности венец 702 зацепляется с сателлитной шестерней 704, помещенной между венцом 702 и зубчатой ступицей 706 зубчатого колеса 708, концентричного золотнику 264 распределителя 260.
Шестерня 704 установлена с возможностью свободного вращения на цапфе 710, которая соединена посредством плеча 712 со стержнем 246 и образует вместе с ним водило. При этом ось цапфы 710 параллельна оси стержня 246, но радиально смещена относительно нее. Таким образом, в отличие от примера выполнения по фиг.6 и 7, стержень 246, который вращается вместе с золотником 264 распределителя, находится в кинематической связи с зубчатой рейкой 420 не только через посредство ведомой шестерни 250, но также с помощью шестерни 704 и венца 702.
Зубчатое колесо 708 подсоединено к выходному валу 714 шагового двигателя 716. Вычислительное устройство 80 управления вектором тяги подает на двигатель 716 управляющий сигнал ввода углового смещения между стержнем 246 и зубчатой рейкой 420 путем вращения зубчатого колеса 708 и шестерни 704. Это угловое смещение определяется в функции управляющей команды на ориентацию сопла, подаваемой органами управления полетом. Следует отметить, что в представленном примере выполнения очень высокий коэффициент редукции относительно двигателя 716 позволяет использовать простой шаговый двигатель без редуктора.
Команды векторного регулятора накладываются на команды управления выходным сечением от вычислительного устройства 90. Это вычислительное устройство 90 получает от ведущего гидроцилиндра 10 данные о положении створки и подает на управляющий блок 50 необходимые сигналы управления для получения желаемого выходного сечения посредством одновременного воздействия на створки ведущим и ведомыми цилиндрами.
Предусмотрена связь в диалоговом режиме между вычислительными устройствами 80 и 90 для оптимизации режима работы двигателя в соответствии с командами управления ориентацией и мощностью.
Таким образом, использование системы синхронизации по изобретению дает два существенных преимущества:
- за счет наличия гидравлического усиления на уровне ведомых гидроцилиндров электрические средства следящего автоматического управления смещением положения связаны с ведомыми цилиндрами и, соответственно, могут работать при более низком уровне потребляемой мощности, и
- в случае неисправности электрической цепи управления соплом система возвращается в режим механической синхронизации цилиндров, что является безопасной резервной позицией (сопло не блокировано в положении, отличном от нейтрального).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой электрогидравлический привод | 1978 |
|
SU792002A1 |
| СИСТЕМА СИНХРОНИЗАЦИИ СТВОРОК СОПЛА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2006 |
|
RU2317432C1 |
| Регулируемое сопло турбореактивного двигателя | 2021 |
|
RU2770572C1 |
| ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2153593C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕВЕРСОР ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С СИСТЕМОЙ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СТВОРОК | 2003 |
|
RU2323360C2 |
| Колесное транспортное средство | 1981 |
|
SU948704A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ ФМВ | 1993 |
|
RU2061600C1 |
| СИСТЕМА ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА РЕВЕРСИРОВАНИЯ ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 1997 |
|
RU2142569C1 |
| УСТРОЙСТВО РЕВЕРСИРОВАНИЯ ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С ПОВОРОТНЫМИ СТВОРКАМИ, СВЯЗАННЫМИ С УСТРОЙСТВОМ СИНХРОНИЗАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 1998 |
|
RU2151316C1 |



Турбореактивный двигатель включает реактивное сопло с регулируемыми выходным сечением и ориентацией, которые определяются положением подвижных створок, и привод на основе синхронизированных гидроцилиндров. Привод содержит гидравлическую управляющую систему, ведущий гидроцилиндр, по меньшей мере, один ведомый гидроцилиндр и механическое передаточное устройство. Ведущий гидроцилиндр содержит цилиндр и поршень, определяющий в цилиндре две полости, связанные с гидравлической управляющей системой. Ведомый гидроцилиндр содержит цилиндр и поршень, определяющий в цилиндре две полости, из которых, по меньшей мере, первая полость связана с выходом распределителя. Распределитель связан с гидравлической управляющей системой и содержит управляющий орган, положение которого определяет давление в первой полости ведомого гидроцилиндра. Механическое передаточное устройство служит для передачи перемещения поршня ведущего гидроцилиндра на управляющий орган распределителя, связанного с ведомым гидроцилиндром. Распределитель связан с ведомым гидроцилиндром таким образом, что перемещение поршня ведомого гидроцилиндра автоматически следует за перемещением поршня ведущего гидроцилиндра на основе команды положения, поступающей от управляющего органа распределителя, связанного с ведомым гидроцилиндром. Изобретение позволяет обеспечить одновременное перемещение штоков гидроцилиндров и снизить массу привода. 4 н. и 10 з.п. ф-лы, 8 ил.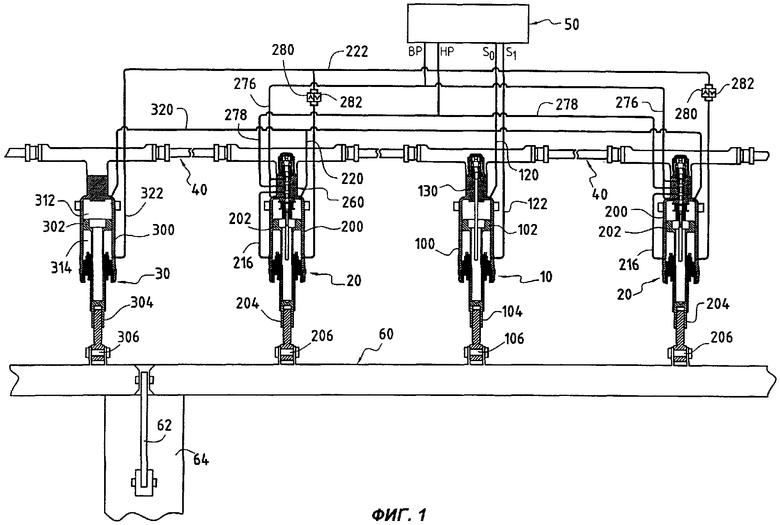
| US 3515033 А, 02.06.1970 | |||
| US 2886008 А, 12.05.1959 | |||
| РАДИОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДИСТАНЦИОННОГО КОНТРОЛЯ ГЕРМЕТИЧНОСТИ СОСУДА | 2021 |
|
RU2756329C1 |
| Пневматический регулятор управления гидроцилиндрами | 1972 |
|
SU457071A1 |
| SU 646633 A1, 10.02.1996 | |||
| ПНЕВМАТИЧЕСКИЙ СЕПАРАТОР СЫПУЧЕГО МАТЕРИАЛА ШОЛИНА | 2017 |
|
RU2657539C1 |

