Изобретение относится к области радиолокации, в частности к радиолокационным измерениям одной из основных радиолокационных характеристик - амплитудных диаграмм обратного рассеяния (ДОР) радиолокационных целей типа самолет, вертолет, автомобиль с кунгом и т.п. на полигонах открытого типа.
По определению ДОР объекта радиолокации представляет собой зависимость параметров (амплитуда, фаза) радиолокационного сигнала (PC), отраженного от объекта при изменении его пространственного положения относительно измерительной РЛС по заданному закону. Как правило, амплитудные ДОР крупногабаритного объекта на полигонах открытого типа измеряются при его вращении по кругу в азимутальной плоскости в диапазонах длин волн от миллиметрового до метрового.
Предлагаемое устройство предназначено для аппаратурного обеспечения измерений амплитудных ДОР подвижных крупногабаритных объектов с размерами базы до 10 м, высотой 6-10 м и массой несколько десятков тонн. Именно такие радиолокационные цели создают наибольшие трудности при измерениях их ДОР с требуемой точностью по следующим основным причинам [1. Е.А.Штагер. Рассеяние радиоволн на телах сложной формы. - М.: Радио и связь, 1986, с.171-174; 2. Р.Б.Дибдал. Методы измерения эффективной площади отражения радиолокационных целей. - ТИИЭР, 1987, т.75, №4, с.81-99]:
1. Требования к механической прочности и грузоподъемности большинства известных устройств для вращения рассматриваемых целей противоречат стандартным условиям плавности вращения цели и низкого уровня отраженных от устройства зондирующих PC;
2. Относительное большие (до 6-10 м) размеры рассматриваемых целей в вертикальной плоскости, размещение их в дальней зоне локации вблизи подстилающей поверхности (ПП) существенно затрудняют обеспечение равномерности напряженности облучающего поля по раскрыву цели в вертикальной плоскости и снижают точность измерений ДОР;
3. Большие размеры радиолокационных целей типа самолет (до 20-25 м и более в горизонтальной плоскости) приводят к значительным переотражениям PC между известными опорно-поворотными устройствами и нижней частью цели, что обуславливает дополнительные погрешности измерения их ДОР.
Известны несколько устройств большой грузоподъемности, предназначенных для разворота крупногабаритных и длинномерных объектов. Например, стенд для разворота самолета [3. Россия, АС 364505, МПК В64f 1/24, 1972 г.], устройство для наземного разворота самолета [4. Россия, АС 473643, МПК В64f 1/24, 1975 г.], опорно-поворотное устройство [5. Россия, АС 2092424, МПК 6 В66С 23/84, 1997 г.].
Общим недостатком известных устройств является низкая точность измерения амплитудной ДОР крупногабаритных объектов при их размещении на известных устройствах из-за высокого уровня помеховых PC, отраженных (или переотраженных при взаимодействии с объектом) таким устройством, а также вследствие значительной неравномерности напряженности облучающего поля по раскрыву объекта в вертикальной плоскости. Основными источниками такой неравномерности облучающего поля при измерении амплитудной ДОР крупногабаритных объектов на полигонах с экранирующей ПП и с радиолокационными экранами (РЛЭ) соответственно являются [1. Е.А.Штагер. Рассеяние радиоволн на телах сложной формы. - М.: Радио и связь, 1986, с.171-174; 2. Р.Б.Дибдал. Методы измерения эффективной площади отражения радиолокационных целей. - ТИИЭР, 1987, т.75, №4, с.81-99]:
взаимодействие прямых зондирующих PC с зеркально отраженными от ПП в рабочем объеме РЛС, где размещается объект;
возмущение в существенной зоне распространения прямых зондирующих PC, вносимое РЛЭ, а также дифракция последних на РЛЭ.
Наиболее близким к предлагаемому устройству по технической сущности и достигаемому основному положительному эффекту является устройство для наземного разворота самолета [4. Россия, АС 473643, МПК В64f 1/24, 1975 г.], содержащее платформу, снабженную консольной площадкой под носовое шасси и опирающуюся на воздушную подушку, и вертикальный вал, установленный в колодце фундамента посредством подшипников. С целью повышения надежности работы (в том числе плавности вращения самолета) на нижней поверхности платформы закреплен цилиндрический борт, расположенный в образованном в фундаменте кольцевом канале, который заполнен жидкостью, изолирующей воздух от внешней среды.
Основными недостатками прототипа, обуславливающими низкую точность измерений ДОР крупногабаритных объектов, особенно на полигонах с экранирующей ПП, являются:
невозможность подъема рассматриваемого объекта на высоту, достаточную (при его заданных габаритах) для обеспечения равномерности напряженности облучающего поля по его раскрыву в вертикальной плоскости;
высокий уровень помеховых PC на входе измерительной РЛС, обусловленный переотражением зондирующих сигналов в системе "нижняя часть объекта - платформа".
Технической задачей настоящего изобретения является повышение точности измерения амплитудных ДОР крупногабаритных объектов вблизи ПП в миллиметровом - дециметровом диапазонах длин волн, а также расширение области применения устройства.
Решение поставленной задачи достигается за счет того, что в состав прототипа, содержащего платформу, снабженную закрепленным на ее нижней части цилиндрическим бортом, расположенным в кольцевом канале фундамента, заполненным жидкостью с малой вязкостью и низкой температурой замерзания, и опирающуюся на воздушную подушку, создаваемую сжатым воздухом, и вертикальный вал, установленный в колодце фундамента посредством подшипников, а также привод поворота платформы, введены: датчик измерителя угла поворота платформы, жестко закрепленная по центру верхней части платформы металлическая площадка в виде усеченного конуса, диаметр верхней части которой равен диаметру платформы в горизонтальной плоскости, а высота и диаметр нижней части определены по формулам соответственно:

где Ноб и Ншс - высота объекта и высота его колесного шасси (Ншс≡0 для объектов наземной подвижной техники),
и 
где Дпл в - диаметр верхней части площадки, определяемый с учетом максимальных размеров базы подвижного объекта в горизонтальной плоскости;
Нпл - высота площадки, определенная согласно (1);
α - угол наклона образующей конуса (α=45°), определяемый с учетом необходимости исключения влияния отраженных от боковой поверхности конуса помеховых PC на результаты измерения ДОР объекта.
Кроме того, для снижения уровня помеховых PC, обусловленных переотражением зондирующихся сигналов в системе "площадка - нижняя часть объекта", верхняя часть площадки закрыта широкополосным радиопоглощающим материалом (РПМ).
Уравнение (1) получено в соответствии с известным выражением [1. Е.А.Штагер. Рассеяние радиоволн на телах сложной формы. - М.: Радио и связь, 1986, с.173] для функции ослабления напряженности (амплитуды) облучающего поля по раскрыву объекта в вертикальной плоскости:

где V - функции ослабления напряженности (амплитуды) облучающего поля;
h - текущее значение высоты по раскрыву объекта в вертикальной плоскости;
h0 - высота центральной части раскрыва объекта в этой плоскости,
при допустимом значении спада напряженности облучающего поля на нижней и верхней границах раскрыва объекта (не более 1дБ) [6. Р.Г.Куюмджан, Л.Питерс. Требования к расстоянию при измерениях радиолокационного поперечного сечения. ТИИЭР, 1965, т.53, №8, с.1057-1066].
Значение угла наклона α боковой поверхности площадки выбрано равным 45° как достаточное условие для исключения влияния отраженных от этой поверхности PC на результаты измерения ДОР объекта. При этом учитывалась ширина основного лепестка ДОР образующей усеченного конуса (площадки) для максимальной длины волны излучения измерительной РЛС (λ=1 м), максимальное значение  и знак (-) угла места, под которым может происходить зондирование площадки в вертикальной плоскости, а также - размеры площадки, определяемые в соответствии с соотношениями (1)-(2).
и знак (-) угла места, под которым может происходить зондирование площадки в вертикальной плоскости, а также - размеры площадки, определяемые в соответствии с соотношениями (1)-(2).
Уравнение (2) получено на основе простых геометрических соотношений для усеченного конуса.
Сравнительный анализ заявленного изобретения с прототипом показывает, что предлагаемое устройство отличается от известного наличием новых признаков, в том числе:
новых элементов - жестко закрепленная по центру платформы металлическая площадка в виде усеченного конуса, широкополосный радиопоглощающий материал, размещаемый на ее внешней поверхности, и датчик измерителя угла поворота платформы;
новых характеристик - существенное (на 20-25 дБ) снижение уровня фоновых PC, отраженных (переотраженных) от площадки устройства и нижней части объекта в направлении измерительной РЛС; возможность сопоставления текущих значений ДОР объекта с его угловым положением в азимутальной плоскости; относительная равномерность напряженности облучающего поля по раскрыву объекта в вертикальной плоскости.
Использование новых элементов заявляемого устройства (металлическая опора в виде усеченного конуса, широкополосной РПМ, датчик измерителя угла поворота платформы) и реализация известных принципов достижения относительной равномерности облучающего поля по раскрыву объекта в вертикальной плоскости (на основе его подъема на определенную высоту), а также - снижения уровня помеховых PC (на основе выбора специальной формы площадки, минимально необходимых ее размеров и использования широкополосного радиопоглощающего материала) позволяют существенно повысить точность измерения амплитудных ДОР рассматриваемых объектов.
Количественная оценка повышения точности измерения амплитудной ДОР за счет обеспечения равномерности облучающего поля по раскрыву объекта в вертикальной плоскости зависит от его геометрических размеров и конструкции. Так, например, для объекта высотой 8 м относительно ПП при высоте колесных шасси 1,4 м спад напряженности облучающего поля согласно (3) составляет 0,55 по сравнению с его центральной частью. Однако в этом случае точность результатов измерения амплитудной ДОР является неудовлетворительной, так как среднеквадратическое значение частной погрешности измерения составляет 39%. В случае размещения рассматриваемого объекта на предлагаемом устройстве с высотой площадки Нпл=4,7 м, определенной согласно (1), среднеквадратическое значение рассматриваемой погрешности измерения амплитудной ДОР не превосходит 11% и практически не влияет на результирующую точность ее измерения [7. Е.Н.Майзельс, В.А.Торгованов. Измерения характеристик рассеяния радиолокационных целей, с.188-200. Издательство "Советское радио", М., 1972].
Проведенный анализ уровня техники в области радиолокационных измерений и смежных областях позволил установить, что технические решения, характеризующиеся совокупностью признаков идентичных признакам, содержащимся в предложенной заявителем формуле изобретения, отсутствуют, что указывает на соответствие заявляемого изобретения критерию охраноспособности "новизна".
Результаты поиска известных решений в области радиолокационных измерений и близких к ней областях техники с целью выявления признаков, совпадающих с отличительными признаками заявляемого устройства, показали, что в общедоступных источниках информации решения, имеющие признаки, совпадающие с отличительными признаками последнего, не выявлены. При анализе уровня техники также не подтверждена известность аналитической зависимости влияния отличительных признаков настоящего изобретения на указанный заявителем технический результат, следовательно, предлагаемое изобретение соответствует условию "изобретательский уровень".
Предлагаемое техническое решение промышленно применимо, а совокупность характеризующих его признаков обеспечивает возможность исполнения, работоспособность и воспроизводимость, поскольку для реализации заявленного решения могут быть использованы известные материалы и оборудование.
На рисунке представлена функциональная схема заявленного устройства в рабочем положении с объектом и основными составными частями типового радиолокационного измерительного комплекса (РИК).
Устройство содержит установленную на фундаменте 1 платформу 2, снабженную металлической площадкой 3 в виде усеченного конуса под колесные шасси объекта 4 и опирающуюся на воздушную подушку, создаваемую в полости А сжатым воздухом, и вертикальный вал 5, расположенный в колодце 6 посредством подшипников 7, а также на фундамент 1 опорами 8 в исходном (нерабочем) состоянии. Платформа 2 механически сопряжена с приводом 9 поворота платформы, а на ее нижней поверхности смонтирован цилиндрический борт 10, расположенный в образованном в фундаменте 1 кольцевом канале Б, который заполнен жидкостью для герметизации зазора в нем с целью исключения утечки воздуха. Внешняя сторона площадки 3 укрыта широкополосным РПМ (11). На валу 5 установлен датчик 12 измерителя 13 угла поворота платформы 2. Заявляемое устройство (аналогично измерительной РЛС 14, регистрирующему устройству 15, а также измерителю 13 угла поворота платформы 2) входит в качестве основной составной части в типовой радиолокационный измерительный комплекс (РИК).
Повышение точности результатов измерения амплитудных ДОР крупногабаритных объектов с помощью предлагаемого устройства достигается на основе обеспечения равномерности облучающего поля по раскрыву объекта в вертикальной плоскости, практически полного исключения влияния отраженных (переотраженных) от устройства помеховых PC и текущего контроля угла поворота платформы. Предлагаемое устройство, кроме того, позволяет расширить перечень типов (классов) испытываемых объектов, амплитудные ДОР которых подлежат измерению, за счет более универсальной (по сравнению с прототипом) площадки и возможности размещения объектов на адекватной высоте.
Поворотное устройство для измерения амплитудных ДОР крупногабаритных объектов работает следующим образом.
Работа заявляемого устройства начинается после доклада о готовности к работе всех составных частей РИК, при размещении испытываемого объекта 4 на площадке 3, закрытия ее внешней поверхности широкополосным РПМ 11 (например, типа "Ворс") и по команде "Включить вращение платформы 2" (например, по кабельным линиям) на измеритель 13 углового положения платформы и далее - на регистрирующее устройство 15.
Зондирующие сигналы измерительной РЛС 14 на фиксированной частоте определенной поляризации отражаются от объекта 4 и поступают на приемное устройство РЛС 14, с выхода которого передаются на регистрирующее устройство 15. Регистрирующее устройство 15 выдает графики круговых амплитудных ДОР объекта на заданной частоте. В случае многочастотной измерительной РЛС 14 зондирование объекта 4, расположенного на площадке 3 устройства, происходит практически одновременно. При этом регистрирующее устройство 15 выдает графики круговых амплитудных ДОР объекта 4 для нескольких частот зондирующих сигналов определенной поляризации.
Отраженные от площадки 3, закрытой широкополосным РПМ 11, радиолокационные сигналы, затухают до 20-25 дБ и частично отражаются от ее боковой поверхности в направлении, отличном от вектора "площадка 3 - антенна измерительной РЛС 14". Многократно переотраженные в системе "нижняя поверхность объекта 4 - площадка 3 с РПМ 11" радиолокационные сигналы, также как и отраженные от боковой поверхности площадки 3 сигналы, практического влияния на снижение точности измерения амплитудной ДОР объекта 4 не оказывают.
Изобретение относится к области радиолокации. Технический результат заключается в повышении точности измерений диаграмм обратного рассеяния (ДОР) крупногабаритных объектов вблизи подстилающей поверхности (ПП) в миллиметровом - дециметровом диапазонах длин волн при одновременном расширении области применения устройства. Сущность изобретения состоит в том, что на круглой платформе, предназначенной для размещения крупногабаритного объекта, опирающейся на воздушную подушку и на вертикальный вал, установленный в колодце фундамента, по ее центру жестко закреплена закрытая сверху широкополосным радиопоглощающим материалом металлическая площадка в виде усеченного конуса. Высота площадки определяется по формуле Нпл0,71(Ноб-Ншс), где Ноб и Ншс - высота объекта и высота его колесного шасси. Диаметр верхней части площадки равен диаметру платформы, а диаметр нижней части - Дпл н=Дпл в+2Нпл ctg α, где Дпл в - диаметр верхней части площадки и α - угол наклона образующей конуса. 1 ил.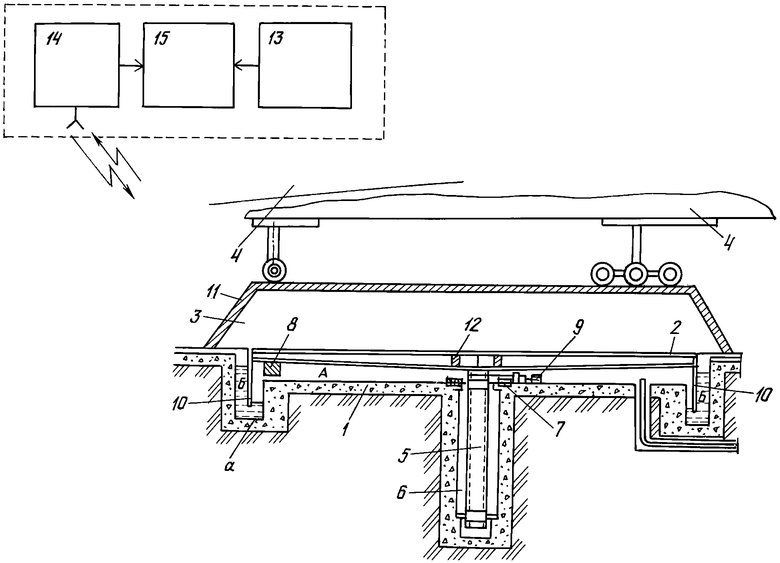
Поворотное устройство для измерения амплитудных диаграмм обратного рассеяния крупногабаритных объектов в азимутальной плоскости, содержащее платформу, снабженную закрепленным на ее нижней части цилиндрическим бортом, расположенным в кольцевом канале фундамента, заполненном жидкостью с малой вязкостью и низкой температурой замерзания, и опирающуюся в рабочем положении на воздушную подушку, создаваемую сжатым воздухом, и на вертикальный вал, установленный в колодце фундамента посредством подшипников, а также привод поворота платформы, отличающееся тем, что на вертикальном валу устройства установлен датчик измерителя угла поворота платформы, выполненной в виде круга, а по ее центру сверху жестко закреплена и покрыта широкополосным радиопоглощающим материалом металлическая площадка в виде усеченного конуса, диаметр верхней части которой равен диаметру платформы, а высота и диаметр нижней части определены по формулам: Нпл=0,71·(Ноб-Ншс) и Дпл н=Дпл в+2Нпл·ctg α соответственно, где Ноб и Ншс - высота объекта и его колесного шасси (Ншс=0 для объектов наземной подвижной техники), Дпл в - диаметр верхней части площадки, α - угол наклона образующей конуса.
| Устройство для наземного разворота самолета | 1973 |
|
SU473643A1 |
| Азимутальное опорно-поворотное устройство радиотелескопа | 1974 |
|
SU517965A1 |
| US 3503664 А, 31.03.1970 | |||
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 1994 |
|
RU2092424C1 |

