Область техники, к которой относится изобретение.
Изобретение относится к области радиолокации, в частности к радиолокационным станциям освещения надводной и наземной обстановки.
Уровень техники.
В настоящее время для обеспечения незатененного осмотра окружающей поверхности с использованием радиолокационной станции (РЛС) размещают антенну РЛС на местности в точке, обеспечивающей максимально возможный незатененный просмотр окружающего пространства, и осуществляют последовательный круговой обзор пространства. В случае невозможности, по условиям рельефа местности, обеспечения незатененного обзора пространства с помощью одной РЛС и наличии важных закрытых препятствиями участков местности, для наблюдения за ними устанавливаются дополнительные РЛС с автоматической, автоматизированной или неавтоматизированной передачей необходимых данных об обстановке на подлежащем контролю участке местности на центральный пункт наблюдения с основной РЛС с устройством ввода передаваемой информации в индикатор основной РЛС. Основными недостатками такой системы наблюдения, принимаемой нами в качестве прототипа, является низкая оперативность и точность передачи данных такой неавтоматизированной системой, техническая сложность автоматизированной или автоматической системы, а также сложность обслуживания таких систем. Необходимость установки в системе дополнительных РЛС с круговым обзором значительно ухудшает экологическую обстановку в районе установки такой системы.
Сущность изобретения.
Предлагается способ формирования радиолокационной станции обзора окружающей поверхности с расширенной зоной обнаружения, при котором размещают антенну обзорной радиолокационной станции (РЛС) в точке на местности, обеспечивающей максимально возможный незатененный обзор окружающего пространства, и осуществляют последовательный круговой обзор. Способ отличается тем, что выявляют наличие в зоне обзора естественных препятствий, закрывающих находящееся за ними пространство, размещают на вершинах указанных препятствий системы переизлучателей радиолокационных сигналов, обеспечивающие переизлучение прямых сигналов от РЛС в сторону находящихся в области тени целей, а также переизлучение отраженных целями сигналов в сторону антенны РЛС. Переизлучают, с использованием указанных систем переизлучателей, излучаемые антенной РЛС прямые радиолокационные сигналы, в том числе в сторону затененного данным препятствием участка пространства. Облучают переизлученными сигналами находящиеся в зоне тени цели. Переизлучают, через систему переизлучателей в сторону антенны РЛС отраженные находящимися в зоне тени целями сигналы. Принимают антенной РЛС, усиливают и воспроизводят на экране индикатора РЛС отраженные закрытыми целями сигналы. Определяют направления на обнаруженные цели и расстояния до них.
Предлагается устройство, реализующее способ по п.1, включающее радиолокационную станцию с круговым обзором пространства земной и водной поверхности с антенной, установленной на местности в точке, обеспечивающей обзор максимально возможной площади окружающего пространства. Устройство отличается тем, что в состав основной РЛС дополнительно включены системы переизлучателей, устанавливаемые на вершинах препятствий, вызывающих затенение целей, в линию, перпендикулярную направлению излучения антенны РЛС. Каждая система переизлучателей включает рассеивающие электромагнитное поле элементы в виде проводящих сфер, цилиндров или тросов, переизлучающих облучающее их электромагнитное поле в соответствии с диаграммой рассеяния переизлучающих элементов, в большей степени в направлении от облучающей РЛС, в том числе прямых сигналов в сторону находящихся в области тени целей и отраженных закрытыми целями сигналов в сторону антенны РЛС. Это обеспечивает переизлучение прямых сигналов в сторону затененного данным препятствием участка пространства, облучение переизлученными сигналами находящихся в зоне тени целей, облучение переизлученными сигналами закрытых препятствием целей, переизлучение отраженных находящимися в зоне тени целями сигналов в сторону антенны РЛС. Прием, усиление и воспроизведение на экране индикатора РЛС отраженных закрытыми целями сигналов, определение направления на обнаруженные цели и расстояния до них.
Предлагается устройство по п.2, отличающееся тем, что система переизлучателей представляет собой набор установленных в линию укрепленных на основании идентичных сферических переотражателей на расстояниях один от другого не более половины ширины диаграммы направленности антенны РЛС в месте расположения системы переизлучателей, Диаметры сфер и расстояния между ними определяются так, что, за счет суммарного рассеянного сферами поля обеспечивается обнаружение расположенных в зоне тени целей с заданной эффективной поверхностью рассеяния на требуемом расстоянии. Это осуществляется за счет переотражения радиоволн в сторону закрытых препятствием целей, облучения целей рассеянным системой переизлучателей полем, отражения закрытыми целями переотраженных сигналов РЛС, в том числе и в сторону системы переизлучателей и их переизлучение системой переизлучателей в сторону антенны РЛС.
Предлагается устройство по п.2, отличающееся тем, что каждая система переизлучателей радиолокационных сигналов представляет собой установленные в линию столбовые опоры, между вершинами которых натянуты в один или в несколько рядов круглые проводники диаметром, равным или больше длины волны РЛС, обеспечивающие, при облучении части системы переизлучателей по его длине, определяемой расстоянием от облучающей антенны РЛС и ширины диаграммы направленности антенны РЛС в горизонтальной плоскости, рассеяние радиоволн в прямом направлении от РЛС согласно суммарной диаграмме рассеяния данной системы переизлучателей, в зависимости от характеристик проводников и их числа, с расширением сектора переизлучения в вертикальной плоскости, в том числе в сторону тени за системой переизлучателей с находящимися там закрытыми препятствием целями, а также переизлучение отраженных в сторону системы переизлучателей закрытыми целями сигналов в сторону антенны РЛС.
Перечень фигур, чертежей и иных материалов.
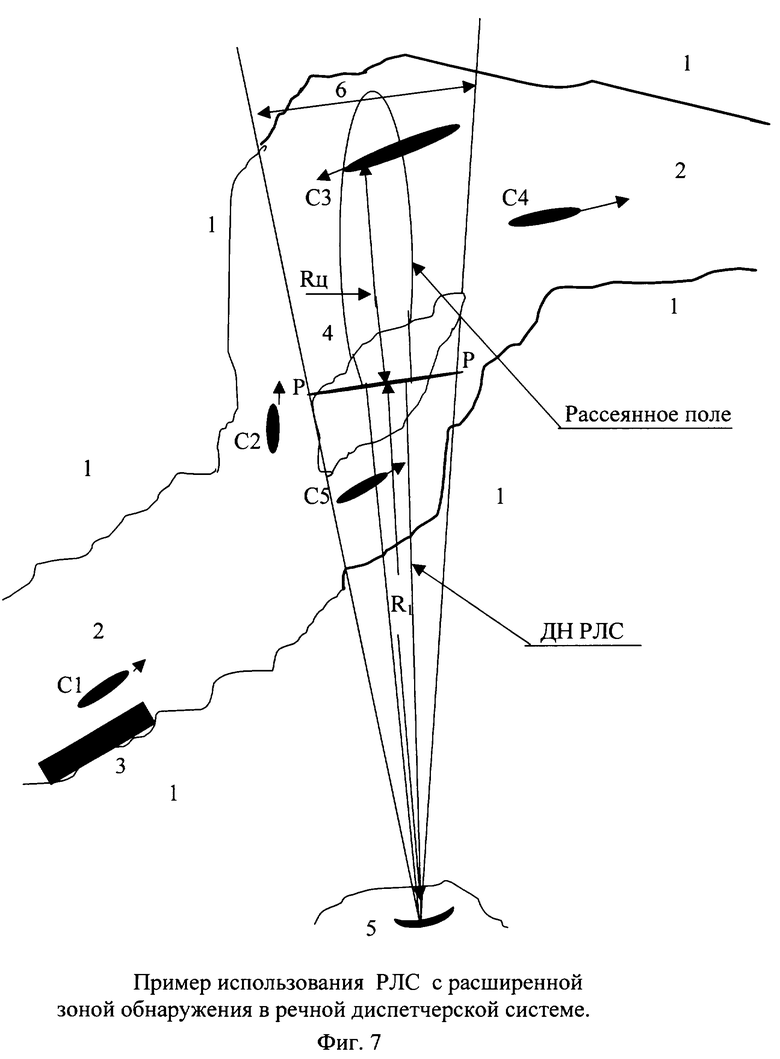
Фиг.1 а), б). Схема радиолокационной станции с расширенной зоной обнаружения.
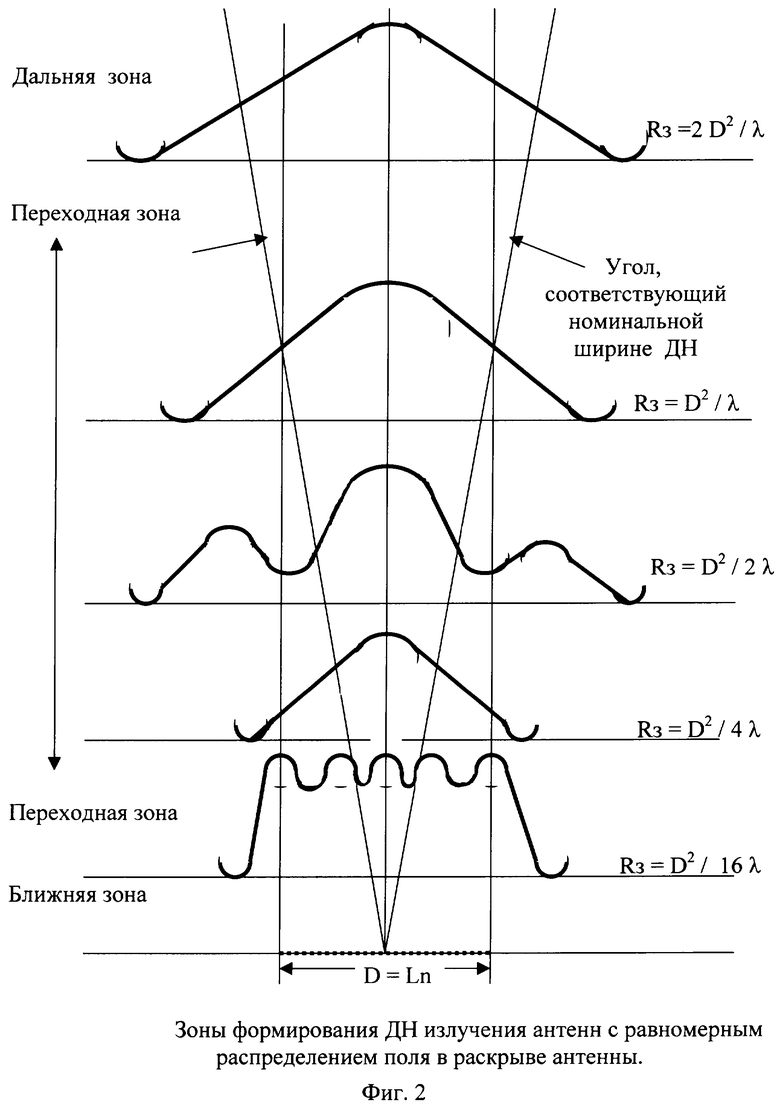
Фиг.2. Зоны формирования ДН излучения антенн с равномерным распределением поля в раскрыве антенны.
Фиг.3 а), б). Диаграммы рассеяния для линейного вибратора.
Фиг.4. Эффективная отражающая поверхность набора сферических отражателей и условия их облучения.
Фиг.5 а), б). Устройство системы переизлучателей сигналов РЛС с расширенной зоной обнаружения из проводящих тросов и из комбинации отражателей.
Фиг.6. Зависимости дальности обнаружения Rц от дальности до системы переизлучателей R1 для систем переизлучателей различной конструкции (по данным таблицы 12 описания).
Фиг.7. Пример использования РЛС с расширенной зоной обнаружения в речной диспетчерской системе.
Сведения, подтверждающие возможность осуществления изобретения
Типовая схема предлагаемой радиолокационной станции с расширенной зоной обнаружения приведена на фиг.1.
На фиг.1 представлена обычная радиолокационная станция (РЛС) обзора окружающей земной или водной поверхности "Наяда-5" - 1, расположенная на возвышенности для обеспечения оптимальной зоны обзора. РЛС "Наяда-5", подробно описанная в книге Судовые радиолокационные станции. Атлас. Под редакцией А.М.Байрашевского. М. Транспорт, 1986, имеет следующие основные характеристики:
1. Длина волны приемопередатчика - λ=3,2 см.
2. Излучаемая мощность в импульсе - Ри=20 кВт.
3. Ширина ДН в горизонтальной плоскости - Θг=0,7 гр.
4. Ширина ДН в вертикальной плоскости - Θв=20 гр
5. Коэффициент усиления антенны - G=2280.
6. Чувствительность приемного устройства - Рпр=-124 дБм.
7. Длительность импульсов - τи=0,07; 0,25 и 0,7 мксек.
8. Частота повторения импульсов - F=3400, 1700 и 850 Гц.
На дальности прямой видимости Rc1 находится видимая и наблюдаемая на экране РЛС цель С1.
На расстоянии от антенны РЛС R расположена цель 2. Цель 2 закрыта от антенны РЛС высоким островом 3.
Антенна РЛС, с ДН в вертикальной плоскости - 4, имеет непосредственно за островом зону тени протяженностью Rт (5) от точки 6 на острове 3, в которой она не имеет возможности обнаруживать надводные цели.
В настоящее время для обеспечения наблюдения целей, находящихся в зоне тени, используются дополнительные РЛС. В нашем случае должна быть установлена на вершине острова 3 в точке 6 еще одна дополнительная РЛС с автоматическим управлением и передачей изображения на основную РЛС 1, а также дополнительная аппаратура на посту РЛС, обеспечивающая прием и отображение информации от дополнительной РЛС на экране основной РЛС. Получается весьма сложная и дорогостоящая система со сложным обслуживанием и дополнительной затратой энергии.
Указанная РЛС типа "Наяда-5" с использованием дополнительных аналогичных РЛС для просмотра области тени с устройствами передачи данных к основной РЛС принимается нами в качестве прототипа предлагаемой РЛС с расширенной зоной обнаружения.
Вместо перечисленных мероприятий предлагается разместить на вершине препятствия 3, на расстоянии от антенны РЛС R1, систему переизлучателей 6, обеспечивающую прием прямых сигналов от РЛС и их рассеяние в области 8, в том числе в сторону находящейся в области тени, на расстоянии Rц от системы переизлучателей цели 2. Отражение закрытой целью 2 рассеянных системой переизлучателей 6 сигналов, в том числе обратно, в сторону системы переизлучателей 6. Рассеяние системой переизлучателей 6 в области 9 отраженных целью сигналов, в том числе в сторону антенны РЛС. Прием отраженных закрытой целью сигналов антенной РЛС и воспроизведение отображения закрытой цели на экране индикатора РЛС.
Находящиеся в зоне прямой видимости цели (например цель 10 на расстоянии Rc1) обнаруживаются и отображаются на экране индикатора РЛС обычным способом.
При предлагаемом способе формирования РЛС с расширенной зоной обнаружения выполняется следующая последовательность действий.
Выявляют наличие и расположение на местности относительно антенны РЛС естественных препятствий (остров 3 на фиг.1), закрывающих находящееся за ними пространство. Размещают на вершине каждого из выявленных препятствий систему переизлучателей 6 радиолокационных сигналов (6 на фиг.1). При направлении антенны РЛС, при ее круговом вращении, в сторону препятствия с системой переизлучателей 6, рассеивают, с помощью системы переизлучателей 6, принятые сигналы в соответствии с ее диаграммой рассеяния 8. Облучают переизлученными сигналами область тени за препятствием, в том числе находящиеся в зоне тени цели, под углом 7 к направлению облучения радиолокационной станцией системы переизлучателей 6 в вертикальной плоскости вниз, (см. позицию 2 на фиг.16). Рассеивают с помощью системы переизлучателей 6, в соответствии с ее диаграммой рассеяния 9 отраженные обратно, в сторону системы переизлучателей 6, находящимися в зоне тени целями сигналы в сторону антенны РЛС 1. Усиливают приемником РЛС принятые антенной станции отраженные закрытыми целями и дважды переотраженные системой переизлучателей 6, при прохождении сигналов в прямом и в обратном направлениях, сигналы и воспроизводят их штатным способом на экране индикатора РЛС. Определяют направление на обнаруженные закрытые цели по положению ДН антенны РЛС, расстояние до цели - по времени прохождения сигнала до закрытой цели и обратно.
Рассмотрим вопрос математического определения дальности обнаружения целей в процессе функционирования предлагаемой РЛС.
При рассмотрении данного вопроса, в том числе при выводе зависимостей и расчетных формул, нами использованы методика и расчетные формулы, приведенные в книге К.В.Голева, Расчет дальности действия радиолокационных станций. Сов. Радио. М., 1962 г.
Схема РЛС с расширенной зоной обнаружения представлена на упомянутой выше фиг.1.
Как видно из фиг.1, обычная РЛС наблюдения установлена на берегу (точка 1). Закрытая препятствием надводная цель находится в точке 2 на расстоянии R от РЛС.
Между антенной РЛС 1 и целью 2 расположен высокий остров 3, закрывающий полностью цель 2 для диаграммы направленности антенны РЛС в горизонтальной плоскости 4, имеющий вследствие этого за островом область тени 5 протяженностью Rт. Для просмотра области тени 5 совместно с РЛС 1 используется система переизлучателей радиолокационных сигналов 6, установленная на вершине острова перпендикулярно направлению на РЛС на расстоянии R1 от антенны РЛС. Обозначим расстояние от системы ретрансляторов до цели в зоне тени через RЦ, а общее расстояние от РЛС до цели через R.
Излучаемая энергия у антенны РЛС SРЛС1 в направлении на систему переизлучателей может быть определена из выражения:
где:
Ри - импульсная мощность передатчика РЛС, Вт;
Gрлс - коэффициент усиления антенны РЛС, ед.;
Плотность потока энергии у системы переизлучателей Sрт1, на расстоянии от антенны РЛС R1 с потерями в атмосфере V1, равна:

Поверхностная плотность энергии непосредственно после системы переизлучателей Sрт2 равна

где:
Крт - коэффициент переизлучения облучающего систему переизлучателей поля.
Поверхностная плотность энергии у цели Sц1 на расстоянии Rц от системы переизлучателей, с потерями в атмосфере Vц составит:
При рассмотрении условий облучения, находящихся в области тени целей на последнем этапе их обнаружения РЛС, будем исходить из следующих положений:
1. Наблюдаемая цель или часть цели находится на оси диаграммы направленности антенны РЛС в горизонтальной плоскости.
2. Ширина результирующей диаграммы направленности переотраженных системой переизлучателей сигналов в горизонтальной плоскости в ближней от системы переизлучателей зоне, где и предполагается возможным обнаружение скрытых препятствием целей, равна ширине облучаемой части системы переизлучателей.
В вертикальной плоскости диаграмма рассеяния поля системы переизлучателей достаточно широкая и направлена также в сторону вероятного места расположения целей.
Отраженное целью поле в сторону системы переизлучателей и антенны РЛС - Sц2 равно мощности облучающего поля, помноженной на коэффициент переизлучения поля точечным эквивалентом цели I=σ/4π, где σ - эффективная площадь рассеяния (ЭПР) точечного эквивалента цели.

Выражение 5 для величины Sц2 можно представить в развернутом виде, с учетом выражений 2, 3, 4 и 5.

Выражение 6 состоит из пяти членов, первый из которых характеризует излучение РЛС, второй - потери сигнала при распространении радиоволн от РЛС до системы переизлучателей, третий - прохождение сигналов в системе переизлучателей, четвертый - потери сигнала при распространении радиоволн от системы переизлучателей до цели и пятый характеризует переотражение радиоволн целью. При распространении радиоволн в обратном направлении потери сигнала при распространении в атмосфере (дроби 4 и 2) и при прохождении системы переизлучателей будут идентичны потерям при прохождении прямых сигналов.
Для определения поверхностной плотности отраженной целью энергии у антенны РЛС Sрлс2 необходимо учесть изменение энергии с использованием указанных выше членов выражения 6 - четвертого, третьего и второго, умножив на них соответствующие члены выражения. В результате этого, выражение для определения величины Sрлс2 примет вид:

Мощность отраженных целью сигналов, приходящая к антенне РЛС от системы переизлучателей Рпр, принимается антенной РЛС и поступает через СВЧ-тракт на вход приемника РЛС. Обозначим эффективную площадь антенны РЛС через Арлс=Gрлс·λ2/4π. Тогда, величина Рпр для сигнала от системы переизлучателей может быть определена из выражения:

Полная формула для определения суммарной мощности отраженных сигналов, принятых антенной РЛС, определяется выражением:

Операторов РЛС обычно интересует дальность обнаружения различных целей при заданных параметрах РЛС. В предлагаемой РЛС дальность расположения системы переизлучателей определяется расположением РЛС относительно препятствия - величина постоянная. Переменной величиной является дальность обнаружения цели от системы переизлучателей Rц. Преобразовав выражение 9 относительно расстояния Rц, получим выражение для дальности обнаружения скрытых препятствием целей, сначала Rц, затем полную дальность от РЛС до цели R=R1+Rц.

Для удобства написания и обращения с формулами обозначим:


где:
Прлс - энергетический потенциал РЛС;
I - коэффициент переизлучения цели.
С учетом проведенных преобразований, выражение для дальности обнаружения целей предлагаемой РЛС с системой переизлучателей Rц и R принимают вид:


Полученные выражения будут нами использованы при расчетах дальности обнаружения целей с различными системами переизлучателей.
Каждая система переизлучателей является одновременно приемной и передающей антенной или целью, рассеивающей энергию назад и, в большей степени, вперед. Вблизи системы переизлучателей, в ближней зоне, где диаграмма направленности еще не сформировалась, переотраженным системой переизлучателей полем облучается прилегающая к системе переизлучателей область во всю ширину облучаемой части (зоны) системы переизлучателей. Ширина зоны равна величине ширины ДН антенны РЛС на дальности от антенны РЛС до данной системы переизлучателей. По мере удаления от системы переизлучателей ДН отраженного поля будет сужаться и принимать форму, характерную для ДН в дальней зоне.
Предлагаемая система переизлучателей может рассматриваться как антенна типа фазированной антенной решетки с переменными горизонтальными размерами, определяемыми шириной ДН антенны облучающей РЛС и расстоянием системы переизлучателей от антенны РЛС.
Рассмотрим более подробно вопрос о диаграмме направленности рассеянного системой переизлучателей поля в горизонтальной плоскости в зависимости от расстояния от системы переизлучателей, определяющей условия обнаружения скрытых целей.
Подробно данный вопрос рассмотрен в книге "Современная радиолокация", перевод с английского, под ред. Ю.Б.Кобзарева, М., Сов. Радио, 1969, стр.374-377. В указанной книге отмечено, что существуют различные зоны фокусирующей поле антенны (см. фиг.2). Обозначим общим символом границу зон через Rз. Применительно к рассматриваемому нами вопросу, с учетом принятых условных обозначений, ближняя зона - Rз или поле раскрыва охватывает область, ширина которой равна диаметру раскрыва антенны - D, в нашем случае облучаемой части системы переизлучателей - Ln, а расстояние от антенны до облучаемой цели - Rц, дальней границы ближней зоны, приблизительно равна R3=Ln2/16λ. Дальняя зона излучения начинается на удалении около Rз=2Ln2/λ, от антенны. Между этими двумя зонами находится переходная область.
Действующая ширина антенны системы переизлучателей Ln определяется шириной участка антенны, облучаемого ДН антенны РЛС в горизонтальной плоскости с угловым размером - ϕг, зависящей от расстояния от антенны РЛС до системы переизлучателей - R1. Для определения величины Ln можно использовать выражение:

Практически, граница дальней зоны соответствует расстоянию от антенны, равному по крайней мере Rз=2Ln2/λ. На таком удалении отклонение фазы отдельных составляющих поля, формируемых различными точками раскрыва антенны, не превышают λ/16, что едва различимо и не имеет никакого значения, за исключением особых случаев, когда предъявляются специальные требования. При синфазном поле в апертуре антенны вдоль оси излучения все векторы поля складываются в фазе. В точках вне оси имеет место некоторая взаимная компенсация составляющих суммарного поля. Почти полная компенсация происходит, когда угловое отклонение от оси составляет около λ/Ln радиан. Это отношение приблизительно равно ширине луча антенны на уровне половинной мощности (см. фиг.2).
Задача получения закономерностей распределения поля на различных расстояниях от величины раскрыва антенны заключается в том, чтобы суммировать поля, формируемые множеством бесконечно малых переизлучателей, с учетом надлежащих фазовых соотношений.
На фиг.2 схематически показан, взятый из указанной выше книги, процесс формирования диаграммы направленности антенны, в том числе и ДН облученной части предлагаемой системы переизлучателей, соответствующей различным зонам. В указанной книге отмечается, что в весьма грубом приближении можно считать, что на расстоянии от антенны до D2/λ луч антенны ограничен цилиндром, а на больших расстояниях - конусом, угол при вершине которого равен номинальной ширине ДН антенны. В принятых нами обозначениях D=Ln - поперечная длина элементов системы переизлучателей, одновременно облучаемых ДН антенны РЛС, Rц - расстояние от системы переизлучателей до цели.
Для ориентировочной оценки условий и расстояний формирования поля предлагаемой системы переизлучателей в ближней и дальней зонах, в таблице 2 приведены границы ближней и дальней зон формирования поля системы переизлучателей для облучающей РЛС с антенной, имеющей ДН в горизонтальной плоскости один градус, на расстояниях РЛС - система переизлучателей в пределах от 0,5 до 3 км, для длины волны 3,2 см.
Приведенные в таблице результаты расчетов показывают, что граница ближней зоны для системы переизлучателей, при выбранных исходных данных и параметрах РЛС, имеет протяженность от 0,15 до 5,36 км. На этих расстояниях ДН системы переизлучателей по ширине равна Ln - поперечной длине облучаемых элементов системы переизлучателей, а мощность переизлучаемого системой переизлучателей в этой области поля равна сумме переизлученных полей облучаемых элементов (если их несколько).
Для определения ширины ДН системы переизлучателей в вертикальной плоскости используем зависимости, приведенные в книге "Антенны и устройства СВЧ", под редакцией Д.Н.Вознесенского. М., Радио и связь, 1981, стр.24. Для синфазного вертикального раскрыва антенны-переизлучателя ширина ДН на уровне половинной мощности (род при равномерном по высоте облучающем поле в градусах, определяется из выражения.

где: λ - длина волны,
Lв - вертикальный размер антенны.
В таблице 3 представлены результаты расчета ширины ДН системы переизлучателей в вертикальной плоскости при использовании в системе переизлучателей в вертикальной плоскости различного числа переотражающих линий с различными вертикальными размерами - Lв.
Данные таблицы 3 показывают, что использование в системе переизлучателей нескольких линий переотражающих элементов ограничено получаемой при этом суммарной шириной ДН в вертикальной плоскости.
Возможность использования в системе переизлучателей различных по ширине ДН в вертикальной плоскости зависит от условий размещения системы переизлучателей - от высоты препятствия и высоты места расположения системы переизлучателей относительно водной или земной поверхности за препятствием, а также необходимой минимальной дальности обнаружения целей за препятствием. Чем выше препятствие, чем ниже за препятствием подстилающая поверхность и чем ближе к препятствию могут находиться скрытые цели, тем шире должна быть ДН системы переизлучателей, обеспечивающая обнаружение этих целей.
Очевидно, что коэффициент переизлучения системы переизлучателей Крт увеличивается с повышением коэффициента направленности системы переизлучателей в вертикальной плоскости за счет использования нескольких переизлучающих линий элементов. Однако это приводит к уменьшению вертикальной ДН системы переизлучателей и появлению у него "мертвой" зоны в области тени.
В связи с изложенным очевидно, что параметры каждого переизлучателей в значительной степени зависят от условий его размещения на местности, в том числе относительно облучающей РЛС, и необходимой области обзора пространства за препятствием.
Эффективность переотражения радиоволн системой переизлучателей зависит от отражающих свойств использованных в них конструкций. Эти свойства зависят от размеров конструкции (обычно имеется сильная зависимость от площади проекции конструкции на плоскость, перпендикулярную направлению на РЛС), ее конфигурации, использованного материала, длины волны РЛС, ее поляризации и направления облучения. Для характеристики отражающих свойств цели пользуются обобщенной величиной - эффективной отражающей площадью цели (ЭОП)
Эффективная отражающая площадь цели (ЭОП) - σц это площадь некоторой фиктивной плоской поверхности, расположенной нормально к направлению падающей плоской волны и являющейся идеальным и изотропным параизлучателем, которая, будучи помещена в точку цели, создает у антенны РЛС ту же плотность потока мощности что и реальная цель (см. М.И.Финкельштейн. Основы радиолокации. М., Сов. радио, 1973, стр.116-130). Иногда эффективную отражающую площадь цели (ЭОП) называют также эффективной площадью рассеяния (ЭПР). Обычно величина ЭОП зависит от направления облучения цели по азимуту и углу места. Такую зависимость называют диаграммой обратного рассеяния - ДОР. Следует различать диаграмму обратного рассеяния (ДОР) и диаграмму рассеяния (ДР).
При снятии ДОР передатчик и приемник совместно перемещается вокруг исследуемой цели. При снятии ДР передатчик остается неподвижным, а приемник движется по окружности вокруг цели.
Для обычной радиолокации наибольший интерес представляет знание ДОР. В связи с этим, зависимости ДОР для различных тел исследованы в большей степени. Знание величин ДР необходимо для определения характеристик обнаружения целей при использовании двухпозиционных и многопозиционных систем РЛС с размещением передатчика и приемника в разных местах.
Определение ДР для случая двухпозиционной РЛС является более сложной задачей, т.к. ее значение зависит не только от ракурса цели, но и от величины угла разноса направлений на цель передатчика и приемника РЛС (см. Справочник по радиолокации. Редактор М. Сколник. Том 4. Радиолокационные станции и системы. М., Сов. радио, 1978, стр.209).
Для случая переотражения поля под углами, близкими к 180 градусам, как это имеет место в предлагаемой системе переизлучателей, наблюдается увеличение рассеяния в прямом направлении. На основании теоремы Кирхгофа установлено, что ЭПР в прямом направлении равна σ=4πА2/λ2, где А - площадь, ограничиваемая кривой, разделяющей облученную и затененную области тела, a λ - рабочая длина волны РЛС. Это обстоятельство дает возможность повысить эффективность системы, если только условия ее применения позволяют конструктору использовать такое размещение ее элементов, при котором цели оказываются расположенными между передатчиком и приемником. В нашем случае в таком положении оказываются системы переизлучателей, расположенные между РЛС и закрытыми целями.
Так, например, отношение ЭПР сферы в прямом направлении по сравнению с ее ЭПР для случая однопозиционной РЛС (т.е. при рассеянии падающей энергии в обратном направлении) равно

где а - радиус сферы.
Для а/λ=10 выигрыш составляет 36 дБ.
Изложенное позволяет сделать вывод, что использование переотражающих в прямом направлении устройств вполне реально и может обеспечить получение эффективной системы обнаружения закрытых препятствием целей.
Рассмотрим зависимости эффективной поверхности рассеяния (ЭПР), а также диаграмм обратного и прямого рассеяния (ДОР и ДР) различных физических тел от их геометрических размеров.
Рассмотрим коэффициент переотражения энергии переизлучателем, состоящим из полуволновых линейных диполей длиной около 0,5 А.
В книге "Основы радиолокации", М.И.Финкельштейн, М., Сов. Радио, 1973, стр.119-122, отмечено, что эффективная отражающая площадь (ЭОП) линейного вибратора легко определяется, если рассматривать вибратор как антенну, являющуюся одновременно приемной и передающей.
Для линейного вибратора длиной меньше длины волны характер отражения радиоволн при его облучении РЛС представляется в виде двух симметричных окружностей в горизонтальной плоскости и равномерной круговой в вертикальной плоскости (см. фиг.3а). Эффективная отражающая поверхность (ЭОП) линейного вибратора - σв определяется выражением:

где:
FE(ϕГ) - диаграмма направленности по напряженности диполя в горизонтальной плоскости.
Диаграмма обратного рассеяния (ДОР) направленности диполя в вертикальной плоскости равномерная круговая (см. фиг.3а). Диаграмма рассеяния (ДР) диполя будет сильно вытянута в направлении на цель от РЛС вдоль оси ДН антенны РЛС для прямых сигналов (сплошная линия на фиг.3б) и от системы ретрансляторов в направлении на РЛС для отраженных сигналов в направлении от цели (пунктирная фигура на фиг.3б). В соответствии с выражением 16 величина ДР в прямом направлении определится выражением.

где М - множитель увеличения поля в прямом направлении.
Анализ формы ДН полуволнового линейного вибратора показывает, что отраженное вибратором поле имеет двухстороннюю направленность - в направлении излучения РЛС и обратно, в сторону РЛС. В вертикальной плоскости поле отражается вкруговую по окружности.
Из фиг.3а следует, что для линейного вибратора ДОР в вертикальной плоскости представляет собой окружность, а ДР в вертикальной плоскости (фиг.3б) вытянута в сторону направления облучающего вибратор поля - от РЛС для облучающего поля (сплошная кривая) и от цели - для отраженного целью поля (пунктирная кривая).
Находящаяся в области тени цель (фиг.3б) облучается под углом наклона к оси ДР полем с меньшей напряженностью, чем по оси ДР. Под таким же углом к оси ДР переотраженного вибратором отраженного целью поля будет облучаться и антенна РЛС.
Определенные нами уровни таких полей, в зависимости от угла отклонения от оси ДР вниз, составляют при угле 10 гр. - 0,93, при угле 20 гр. - 0,75, при угле 30 гр. - 0,5.
При проведении оценочных расчетов дальности обнаружения целей в области тени с использованием системы переизлучателей с использованием предлагаемых систем переизлучателей будем использовать значение уровня падения поля, облучающего закрытую препятствием цель и переизлучаемую в направлении антенны РЛС, величиной 0,93.
В таблице 4 помещены математические зависимости от различных факторов величины ЭПР - σ плоской пластины площадью S=L·L, сферы радиусом Rсф=L, цилиндра и проводников различного радиуса - r и длины - L, а также полуволнового диполя, с учетом различной длины волны - λ, взятые из книги "Современная радиолокация", перевод с английского, под редакцией Ю.Б.Кобзарева, Сов. Радио, 1969, стр.547-549.




В таблице 5 приведены результаты расчетов величин ДР=σМ для длины волны 3,2 см, величины L=0,5, 1 и 2 метра, радиусами (для объектов 3-7) r=0,01, 0,016 и 0,032 метра для отражающих объектов, приведенных в таблице 4, под их порядковыми номерами. Для цилиндра (объект 3) отдельно рассчитана величина ЭПР для радиуса величиной 0,05 м.
Анализ результатов проведенных расчетов показывает, что наименьшее значение ЭПР из выбранных объектов имеют тонкий, очень тонкий проводник и набор полуволновых диполей, порядковые номера 5, 6 и 7. Заманчиво использовать для переотражения радиоволн плоские пластины, имеющие большие ЭПР, но они переотражают электроэнергию только в обратном направлении в пределах полусферы. Проведенные расчеты показали, что их использование в рассматриваемых системах переизлучателей нецелесообразно.
В результате проведенных расчетов по данным таблицы 5 можно сделать следующие выводы:
1. Использование в качестве переотражателей из комбинации плоских пластин нецелесообразно и не позволит получить переотражение энергии в значительных размерах.
2. Переотражающие сферы обладают хорошими характеристиками и могут быть рассмотрены как элементы переизлучателей.
5. Целесообразно рассмотреть возможность использования в качестве переизлучателей горизонтально натянутые проводящие тросы, помещенные в таблицах 4 и 5 под номерами 3 и 4, имеющие достаточно хорошие характеристики переизлучения 4.
6. Не представляется целесообразным использовать в системах переизлучателей очень тонких проводников и конструкций с использованием полуволновых вибраторов (позиции 5, 6 и 7 в таблицах 4 и 5).
С учетом изложенного, представляется целесообразным более подробно рассмотреть возможность использования для переизлучения радиолокационных сигналов за препятствия на местности в сторону тени и обратно, в сторону РЛС, с использованием комбинации переизлученных сферических отражателей и металлических проводников (объекты 2-4 в таблицах 4 и 5). Указанные объекты обладают наибольшими ЭПР и обеспечивают лучшее переизлучение электромагнитной энергии в сторону тени за препятствием и получение наибольших расстояний обнаружения находящихся в области тени целей.
В таблице 6 приведены результаты расчетов величин М для сферы, цилиндра и тонкого провода толщиной, соизмеримой с длиной волны РЛС (объекты 2, 3 и 4 таблиц 4 и 5), а в таблице 7 соответствующие величины σМ.
Данные таблицы 7 будут использованы нами при выполнении расчетов дальности обнаружения закрытых целей с использованием различных систем переизлучателей.
Рассмотрим возможность и характеристики использования в системах переизлучателей сферических отражателей, рассеивающих электромагнитную энергию в пределах сферы, со значительным увеличением рассеяния в направлении от облучающей РЛС (объект 2 в таблицах 4-7).
Система переизлучателей из указанных элементов может быть создана в виде размещенных на вершине препятствия по горизонтальной линии, перпендикулярной оси ДН облучающей РЛС, ряда из сферических отражателей (см. фиг.5). Число отражателей и расстояния между ними должны обеспечивать одновременное облучение не менее 2-3 отражателей в пределах ширины ДН антенны РЛС в месте расположения препятствия, равной Ln. Расстояния между центрами отражателей должны быть кратными длине волны облучающей РЛС. При этом величина переизлученного сферами поля по оси ДН антенны РЛС будет равна сумме переизлученных полей облучаемых сферических отражателей.
Рассмотрим условия переизлучения электромагнитной энергии облучающей РЛС для случая размещения в пределах ширины ДН антенны РЛС трех сферических отражателей (см. фиг.4). В этом случае, в зависимости от направления облучения переизлучателя антенной РЛС, возможны два характерных положения: одно - облучение осью ДН одного и краями ДН двух крайних сфер (положение 1), другое - облучение только двух сфер равным по уровню полем и расположении оси ДН посредине между сферами (положение 2). Между этими положениями могут быть промежуточные, в которых будут облучаться две сферы полями с разными уровнями мощности (положение 3).
Оценка среднего уровня переизлученного поля в рассматриваемом случае позволяет рассчитать примерные дальности обнаружения находящихся в области тени целей при использовании в качестве переизлучателей системы проводящих сфер. Результаты расчетов для системы переизлучателя с использованием сфер различного радиуса Rсф приведены в таблице 8.
Результаты расчетов дальностей обнаружения целей при использовании в системе переизлучателей сферических отражателей различного размера показывают, что полученные дальности вполне достаточны и могут быть использованы в реальных условиях. Это позволяет сделать вывод о целесообразности использования в системе переизлучателей сферических отражателей.
Рассмотрим характеристики переизлучения и возможные конструкции системы переизлучателей с использованием цилиндрических (круглых) проводящих тросов (проводников) различного диаметра (кроме тонких проводов, имеющих малые эффективные площади рассеяния), помещенных в таблицах 4-7.
Для удобства обращения к различным образцам в таблице 9 помещены принятые нами условные обозначения различных объектов, данные о которых приведены в таблице 7.
Возможные конструкции таких систем переизлучателей представлены на фиг.5. На фиг.5а представлена конструкция из проводящих тросов. На фиг.5б представлена конструкция из комбинации различных переизлучателей - проводящих тросов и сфер.
Конструкция из проводящих тросов (фиг.5а) представляет собой набор вертикальных столбовых опор, размещенных в горизонтальную линию на вершине препятствия, расположенную перпендикулярно направлению на РЛС. Между вершинами опор горизонтально натянуты один или несколько цилиндрических проводников. Если проводников несколько, то расстояния между ними кратны длине волны РЛС, чтобы их переизлученные поля были в фазе.
Характерным свойством протяженных круглых тел различной длины, начиная с полуволнового диполя, является круговая диаграмма направленности в вертикальной плоскости, перпендикулярной оси этих тел, вытянутая на величину М в направлении от РЛС. Для определения коэффициента переизлучения рассматриваемых протяженных тел, как отдельных элементов системы переизлучателей, необходимо разделить значение ЭПР тела или его участка на 2π.

Для определения коэффициента переотражения Крт такой системы переизлучателей необходимо определить длину облучаемой части такой системы переизлучателей лучом РЛС с заданной величиной ДН на заданном расстоянии от РЛС R1-Ln. Затем учесть неравномерность облучающего систему переизлучателей поля по ширине ДН антенны РЛС от единицы, по оси ДН, до половинной мощности на ее краях, а также величину ЭПР использованного в системы переизлучателей проводника при рассеянии в прямом направлении - σМ.
Для простоты расчетов будем использовать величины σМ для одного погонного метра системы переизлучателей, приведенные в таблице 7. Изменение величины (от уровня мощности облучающего систему переизлучателей поля от 1 до 0,5 и определение общего для всей системы переизлучателей коэффициента переотражения Крт будем определять с использованием выражения 20, при нечетном значении n, и выражения 21, при четном значении n.


где: σМ - удельная ЭПР проводника длиной в 1 метр,
n - число метров в половине ширины ДН РЛС.
∂ϕ - угловой шаг расчета, равный ширине ДН, деленной на 2n.
I - коэффициент переизлучения проводника длиной в 1 метр,
Для количественной оценки величины Крт системы переизлучателей с использованием указанных выше проводников используем условные обозначения проводников (объектов), приведенные в таблице 9.
В столбцах 4 и 5 таблицы 10 в скобках приведены условные обозначения объектов.
В таблице 11 приведены значения расчетных данных по Rц для приведенных в таблице 10 значений коэффициентов переизлучения объектов при величинах R1, равных (1-7) км.
Исходные данные для РЛС аналогичны данным, использованным в предыдущих расчетах для РЛС - прототипа Наяда-5.
Полученные результаты подтверждают возможность получения практически пригодных дальностей обнаружения закрытых целей с использованием в системах переизлучателей переотражающих тросов и цилиндров.
В таблице 12 представлены обобщенные данные о расчетных дальностях обнаружения закрытой цели с σ=100 кв.м при использовании в системах переизлучателей исследованных выше конструкций.
Данные таблицы 12 показывают, что при использовании предлагаемых конструкций систем переизлучателей имеется широкая возможность выбора системы, необходимой для обеспечения наблюдения за закрытыми целями, исходя из конкретных условий местности и размеров области тени за препятствием. В некоторых случаях представляется целесообразным использовать смешанные по конструкции системы переизлучателей, как это представлено на фиг.5б.
На фиг.6 представлен график зависимости дальности обнаружения закрытых препятствием целей Rц от дальности до препятствия и расположенной на нем системы переизлучателей R1 для систем переизлучателей различной конструкции, приведенных в таблице 12. Анализ зависимостей показывает, что для систем переизлучателей с использованием сферических отражателей (кривые 1 и 2) наблюдается более сильная зависимость дальности обнаружения закрытых целей от расстояния до препятствия - R1.
На фиг.7 приведен пример использования предлагаемой РЛС с расширенной зоной обнаружения в речной диспетчерской системе. На фиг.7 обозначены: берега реки 1, русло реки 2, на берегу которой расположена пристань 3. На некотором расстоянии от пристани на реке расположен гористый и лесистый остров 4. На некотором расстоянии от причала 3 на возвышенности установлена антенна диспетчерской РЛС 5, предназначенная для обеспечения обзора окружающего пространства поверхности реки, включая подходы к причалу. За высоким островом 4 образуется закрытая для обзора РЛС часть речного фарватера 6.
Для обеспечения обзора пространства за островом 4 на вершине острова установлена система переизлучателей РР на расстоянии от антенны РЛС R1.
В районе причала 3 на водной поверхности реки находятся суда С1 -С4. Расстояние до закрытой цели С3 от системы переизлучателей РР обозначено Rц.
Данные о наличии в зоне тени за островом 4 судна С3 на индикаторе обычной РЛС, антенна которой расположена в точке 5, отсутствуют. В сложных метеорологических условиях это может привести к столкновению судов С2 и С3
Использование предлагаемой в настоящей заявке РЛС с расширенной зоной обнаружения, с использованием системы переизлучателей РР, обеспечивает непрерывное наблюдение всех целей в зоне тени 6, в частности цели С3, что обеспечивает полную безопасность плавания судов в зоне ответственности диспетчерской РЛС - 5.
Приведенное описание предлагаемой радиолокационной станции обзора окружающей поверхности с расширенной зоной обнаружения позволяет сделать следующее заключение.
Результаты исследования подтверждают возможность получения практически пригодных дальностей обнаружения закрытых целей с использованием в системах переизлучателей переотражающих тросов и цилиндров.
По сравнению с прототипом предлагаемая радиолокационная станция обзора окружающей поверхности с расширенной зоной обнаружения имеет следующие преимущества:
- высокую оперативность и точность получения информации о закрытых препятствиями целях, не отличающуюся от этих показателей для видимых целей;
- в два-три раза меньший объем обслуживания,
- большую, в число дополнительно используемых РЛС в системе-прототипе, экологическую чистоту;
- меньшую стоимость оборудования,
- значительно меньшую мощность питания,
- большую надежность функционирования.
Предлагаемая радиолокационная станция обзора окружающей поверхности с расширенной зоной обнаружения с набором предложенных систем ретрансляторов значительно расширяет технические возможности РЛС наблюдения в части обеспечения незатененного обзора окружающего пространства.
Техническая реализация предлагаемой радиолокационной станции обзора окружающей поверхности с расширенной зоной обнаружения и систем переизлучателей возможна, т.к. основана на использовании известных в радиотехнике принципов, технических решений и устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ И УСТРОЙСТВО МНОГОКАСКАДНОЙ СТАЦИОНАРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С БЕЗЗАТЕНЕННОЙ ЗОНОЙ ОБЗОРА ОКРУЖАЮЩЕЙ ПОВЕРХНОСТИ | 2001 |
|
RU2206904C2 |
| СПОСОБ ФОРМИРОВАНИЯ И УСТРОЙСТВО МНОГОКАСКАДНОЙ СТАЦИОНАРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С БЕЗЗАТЕНЕННОЙ ЗОНОЙ ОБЗОРА ОКРУЖАЮЩЕЙ ПОВЕРХНОСТИ | 2017 |
|
RU2659406C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТОВ И МНОГОПОЗИЦИОННЫЙ РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2516221C2 |
| СПОСОБ УВЕЛИЧЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ | 2017 |
|
RU2640321C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ МНОГОКАСКАДНОЙ СТАЦИОНАРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С БЕЗЗАТЕНЕННОЙ ЗОНОЙ ОБЗОРА ОКРУЖАЮЩЕЙ ПОВЕРХНОСТИ | 2017 |
|
RU2649850C1 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ С ПОНИЖЕННОЙ РАДИОЛОКАЦИОННОЙ ЗАМЕТНОСТЬЮ | 2011 |
|
RU2502643C2 |
| Способ селекции реальных воздушных объектов на фоне помех, формируемых имитаторами вторичного излучения, за счет использования мобильного радиолокатора | 2021 |
|
RU2787471C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2000 |
|
RU2211458C2 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
Изобретение относится к области радиолокации, в частности к радиолокационным станциям (РЛС) освещения обстановки. Сущность изобретения состоит в том, что в центральный пост освещения обстановки устанавливают на вершинах затеняющих препятствий системы переизлучателей радиолокационных сигналов, осуществляющие переизлучение прямых и отраженных сигналов от РЛС в сторону закрытых препятствием целей и обратно. Достигаемым техническим результатом является обеспечение обнаружения целей за препятствиями, в области тени. 2 н.п. ф-лы, 7 ил., 12 табл.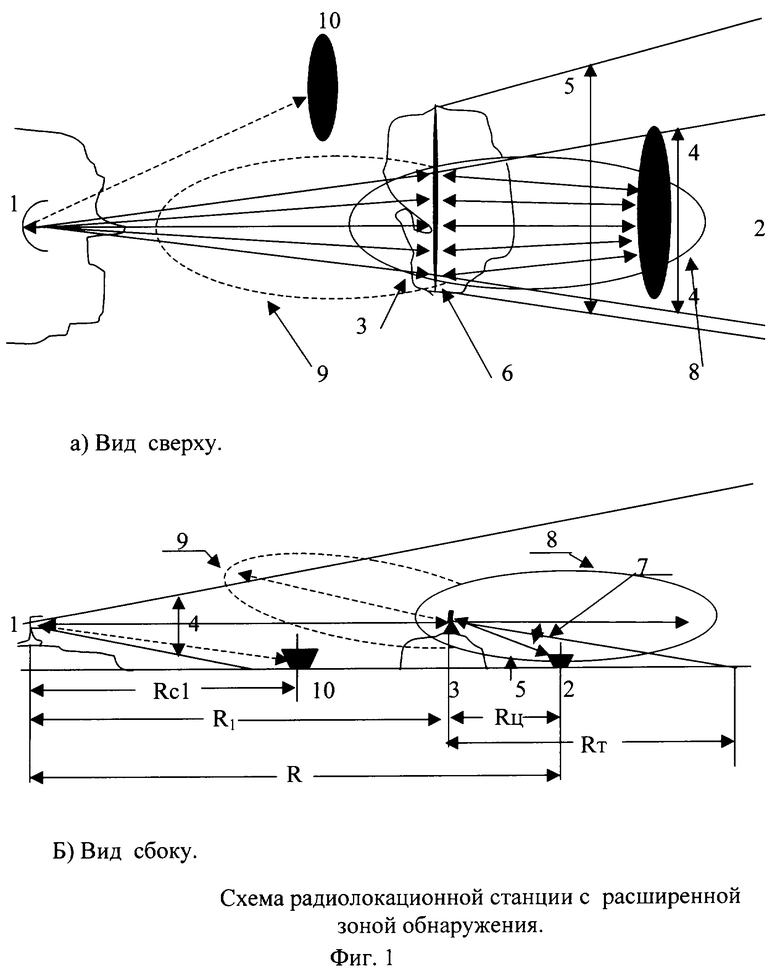

где σМ - удельная ЭПР проводника длиной в 1 м;
∂ϕ - угловой шаг расчета, равной ширине ДН, деленной на 2n;
I - коэффициент переизлучения проводника длиной в 1 м,
а при четном значении n коэффициент переотражения определяется из выражения

| Судовые радиолокационные станции | |||
| Атлас | |||
| /Под ред | |||
| А.М.БАЙРАШЕВСКОГО - М.: Транспорт, 1986 | |||
| RU 2001112480 А, 14.05.2001 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
| US 4727374, 23.02.1988 | |||
| US 5280286 A, 18.01.1994 | |||
| US 4899156, 06.02.1990. | |||

