Изобретение относится к радиотехнике, в частности к области измерения радиолокационных характеристик (РЛХ) объектов с восстановлением их радиолокационных изображений (РЛИ), и может быть использовано для увеличения размеров рабочей зоны некогерентных радиолокационных измерительных комплексов (РИК).
Известен способ восстановления РЛИ объектов по амплитудным ДОР, которые измеряются на некогерентных РИК (Гатилова И.Ю., Понькин В.А., Ужахов Т.С. Определение пространственной структуры локальных отражателей на поверхности объекта по амплитудной ДОР. Радиотехника, 2000, №6, с.79-84). Способ основан на использовании информации, непосредственно содержащейся в интерференционной структуре амплитудной ДОР S(ϕ) как функции текущего угла наблюдения ϕ на интервале углов наблюдения (-Δϕ/2, Δϕ/2).
Восстановление РЛИ осуществлялось путем решения обратной задачи по определению характеристик (месторасположения и амплитуды) ЛИ. Однако ввиду прогрессивного роста общего числа баз M=N(N-1)/2, с увеличением числа ЛИ-N и возникающих при этом трудностей решения обратной задачи применимость способа ограничена малым числом ЛИ (N<5). Поэтому к реальным объектам техники этот способ оказывается не применим.
Наиболее близким по совокупности существенных признаков к предлагаемому способу является способ восстановления РЛИ объектов, основанный на измерении амплитудной ДОР объекта со стационарным центром вращения с введением пространственной несущей частоты опорного сигнала путем обеспечения одновременно с вращением объекта поступательного с постоянной скоростью перемещения опорного отражателя или самого объекта и восстановление на этой основе РЛИ объектов (Варганов М.Е., Зиновьев Ю.С., Астанин Л.Ю. и др. Радиолокационные характеристики летательных аппаратов./ Под ред. Тучкова Л.Т., М., Радио и связь, 1985, с.138-139). Для исключения перекрытия восстановленного изображения нулевого порядка (содержащего помеховые изображения ЛИ, обусловленные их интерференционным взаимодействием) и двух сопряженных изображений первого порядка, содержащих неискаженную информацию о пространственной структуре ЛИ, необходимо выполнение условия

где v - скорость изменения фазы опорного сигнала, ωв - угловая скорость вращения объекта, rmax - наибольший радиус-вектор ЛИ в составе объекта, λ - рабочая длина волны.
Без создания дополнительного оборудования, обеспечивающего линейное перемещение объекта или подвижного опорного отражателя, данный способ можно реализовать на существующих РИК путем установки опорного подвижного отражателя на вращающуюся платформу, на которой размещается и измеряемый объект. При установке опорного отражателя на краю платформы (в направлении, перпендикулярном линии визирования объекта) скорость изменения фазы сигнала подвижного опорного отражателя при этом будет равна
где rп - радиус платформы РИК.
Подставляя это значение скорости изменения фазы сигнала подвижного опорного отражателя в выражение (1), получим условие реализации прототипа на существующих РИК:

То есть максимальный радиус rmax измеряемых объектов с использованием прототипа не превышает половины радиуса платформы rп/2.
Учитывая, что размеры опорно-поворотных платформ РИК согласованы с размерами рабочей зоны РИК и объектов техники, выполнение условия (1) приводит к ограничению размеров рабочей зоны РИК. Это является основным недостатком прототипа.
Задачей изобретения является увеличение размеров рабочей зоны РИК, обеспечивающих измерение РЛХ с восстановлением РЛИ объектов сложной формы со стационарным центром вращения по их амплитудным ДОР.
Поставленная задача решается за счет того, что в известном способе восстановления РЛИ объектов со стационарным центром вращения, основанном на регистрации амплитудной диаграммы обратного рассеяния (ДОР) объекта совместно с подвижным опорным отражателем S(ϕ) как функции текущего угла наблюдения ϕ на интервале углов Δϕ≪1 рад и вычислении квадрата модуля преобразования Фурье S(ϕ) для каждого фиксированного угла  на интервале углов наблюдения Δϕ, регистрируют две ДОР: ДОР объекта совместно с подвижным опорным отражателем S1(ϕ), устанавливаемым, как и объект, на поворотной платформе РИК на расстоянии от оси вращения, большем половины максимального линейного размера объекта в направлении, перпендикулярном линии визирования объекта, и ДОР объекта без опорного отражателя S0(ϕ), составляют по ним разностную ДОР
на интервале углов наблюдения Δϕ, регистрируют две ДОР: ДОР объекта совместно с подвижным опорным отражателем S1(ϕ), устанавливаемым, как и объект, на поворотной платформе РИК на расстоянии от оси вращения, большем половины максимального линейного размера объекта в направлении, перпендикулярном линии визирования объекта, и ДОР объекта без опорного отражателя S0(ϕ), составляют по ним разностную ДОР
ΔS(ϕ)=S1(ϕ)-S0(ϕ)
и по ней путем преобразования Фурье восстанавливают РЛИ объекта.
Сопоставительный анализ заявленного решения с прототипом показывает, что предложенный способ отличается от известного совокупностью новых существенных признаков:
- регистрацией на интервале углов наблюдения двух ДОР, ДОР с подвижным опорным отражателем, установленным на расстоянии, большем или равном половине максимального линейного размера объекта наблюдения в направлении, перпендикулярном средней линии визирования измерительной РЭС и ДОР одного объекта;
- составлением разностной ДОР ΔS(ϕ), образуемой вычитанием из ДОР объекта + подвижный отражатель S1(ϕ), ДОР одного объекта S(ϕ);
- вычислением преобразования Фурье разностной ДОР ΔS.
Проведенный анализ уровня техники позволяет установить, что технические решения, характеризующиеся совокупностью признаков, идентичных всем признакам, содержащимся в предложенной заявителем формуле изобретения, отсутствуют, что указывает на соответствие заявленного изобретения критерию охраноспособности новизна.
Результаты поиска известных решений в данной и смежной областях техники с целью выявления признаков, совпадающих с отличительными признаками заявляемого устройства, показали, что в общедоступных источниках информации не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками. Из уровня техники также не подтверждена известность влияния отличительных признаков заявляемого изобретения на указанный заявителем технический результат. Следовательно, заявленное изобретение соответствует условию изобретательский уровень.
Предлагаемое техническое решение промышленно применимо, так как совокупность характеризующих его признаков обеспечивает возможность его существования, работоспособность и воспроизводимость, так как для реализации заявляемого технического решения могут быть использованы известные материалы и оборудование.
Предложенная последовательность измерений, а именно сначала регистрируют ДОР объекта - S0(ϕ) в поле облучения РИК, потом наряду с объектом устанавливают в рабочем объеме РИК подвижный опорный отражатель, измеряют ДОР объекта + опорный отражатель S1(ϕ), составляют разностную ДОР ΔS(ϕ)=S1(ϕ)-S0(ϕ) и восстанавливают местоположение и интенсивность ЛИ отражения объекта, обеспечивает воплощение изобретения на существующих РИК и решение поставленной задачи - увеличение размеров рабочей зоны РИК по сравнению с известным способом в два раза. Это подтверждается результатами математического анализа, моделирования на ЭВМ и проведенными экспериментальными исследованиями на РИК «Звено-33» ФГНИИЦ РЭБ ОЭСЗ Минобороны России, существо которых состоит в следующем.
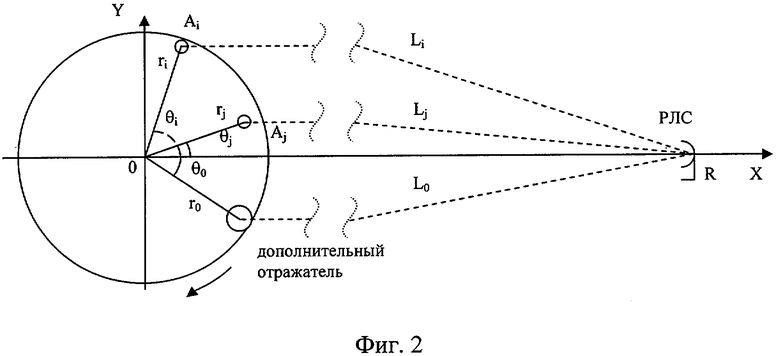
При установке на вращающейся платформе подвижного опорного отражателя (ДО) уравнение амплитудной ДОР системы «объект + ДО» (фиг.1), полученной в результате квадратичного детектирования эхо-сигналов на длине волны λ как функции угла наблюдения ϕ, с точностью до постоянного множителя, будет иметь вид
на фиг.2 изображена схема формирования амплитудной ДОР объекта с использованием подвижного опорного отражателя, где r0, ri, rj, rn, A0, Ai, Aj, An, θ0, θi, θj, θn - радиусы вращения, амплитуды отражения и полярные углы наблюдения опорного, i, j и n - отражателей соответственно, λ - длина волны, N - число ЛИ (фиг.2).
Для малых интервалов углов наблюдения (Δϕ≪1) (фрагмент диаграммы (3) в пределах ϕ∈[-Δϕ/2; Δϕ/2] можно представить в виде
где 
- частота и начальная фаза пространственного колебания, обусловленного интерференцией волн, отраженных от n-го ЛИ и дополнительного отражателя

- частота и начальная фаза интерференционных колебаний i-го и j-го локальных центров рассеяния объекта.
Как следует из анализа выражения (3), при малых угловых интервалах наблюдения (Δϕ≪1) оно по виду совпадает с выражением для амплитудной радиоголограммы объекта, зарегистрированной при наличии подвижного опорного отражателя, что, в принципе, обеспечивает разделение восстановленных сопряженных изображений. Действительно, восстановление одномерного изображения объекта путем вычисления квадрата модуля преобразования Фурье выражения (3) приводит к следующему результату:
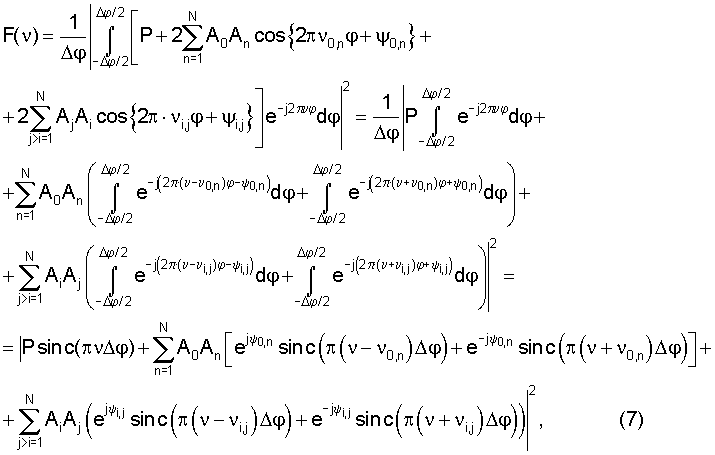
где 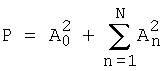 - постоянная составляющая амплитудной ДОР S1(ϕ);
- постоянная составляющая амплитудной ДОР S1(ϕ);
sinc(X)=sin(X)/X - Фурье-образ прямоугольного весового окна.
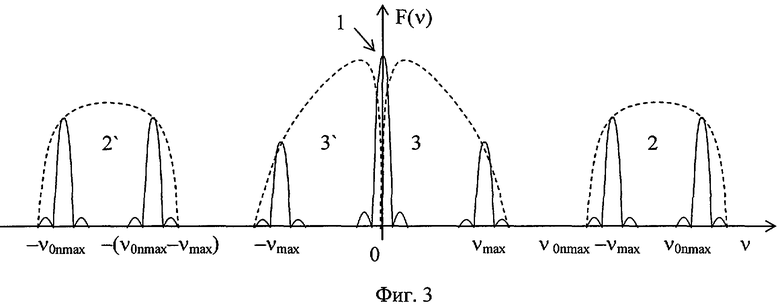
Качественно полученный результат иллюстрирует фиг.3. В соответствии фиг.3 восстановленное по действительной голограмме радиолокационное изображение (7) состоит из трех компонентов, образованных совокупностью функций sin(X)/X. Первый из них соответствует постоянной составляющей амплитудной ДОР, пропорциональной сумме ЭПР всех отражателей в рабочем объеме РИК и расположен в нуле на оси пространственных частот. Второй компонент РЛИ несет полезную информацию о пространственной структуре объекта. Он образован в результате интерференции волн, отраженных от локальных отражателей на объекте и подвижного опорного отражателя, и состоит из двух сопряженных изображений 2 и 2`, расположенных симметрично на оси частот. Каждое из сопряженных изображений представляет собой сумму N весовых функций sin(X)/X, достигающих максимумов в точках ν0,n. При этом значение максимумов пропорционально амплитуде эхо-сигнала от n-го локального отражателя. Третий компонент 3 и 3` представляет собой мешающее изображение, обусловленное интерференцией рассеянных элементарными отражателями волн друг с другом, и вносит погрешность в измерение амплитуды сигналов, отраженных от локальных центров рассеяния.
Из фиг.3 видно, что в (7) в зависимости от соотношения пространственных частот ν0nmax и νmax, (где ν0nmax - максимальная частота интерференционного колебания опорного и n-го ЛИ объекта, νmax - максимальная частота интерференционного колебания i-го и j-го ЛИ объекта) возможны три варианта взаимного расположения компонентов восстановленного РЛИ.
Если ν0nmax≥2νmax, то второй и третий компоненты изображения не пересекаются. В этом случае изображение может быть получено по одной записи амплитудной АДОР системы «объект - ДО». Недостатком такого варианта является ограничение линейных размеров измеряемых объектов ввиду необходимости двукратного превышения радиусом вращения опорного отражателя максимального радиуса объекта (3).
Если 2νmax>ν0nmax≥νmax, то на полезное изображение 2 частично или полностью накладывается мешающее изображение 3. Один из возможных способов компенсации мешающего изображения, как было показано выше, заключается в восстановлении изображения объекта по разностной амплитудной ДОР: системы «объект - ДО» S(ϕ) и исследуемого объекта S(ϕ). B приближении малого сектора углов наблюдения разностная амплитудная диаграмма равна
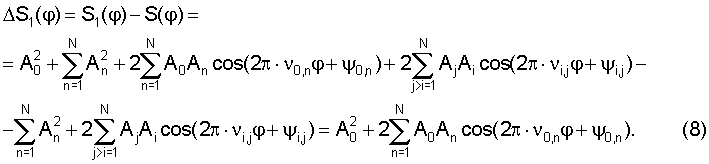
Фрагмент разностной амплитудной диаграммы (8) в малом секторе углов наблюдения можно рассматривать как свободную от мешающего интерференционного фона действительную голограмму Фурье объекта.
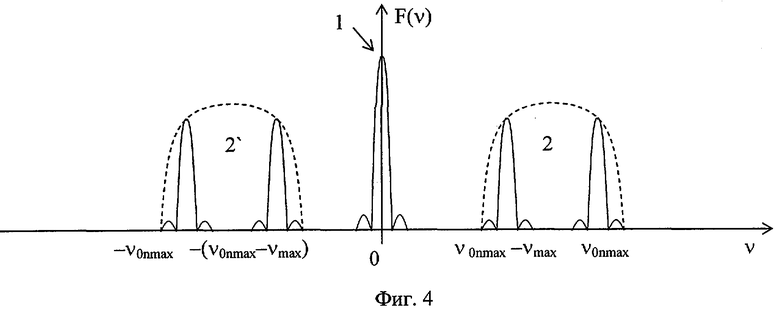
В данном случае восстановленное изображение
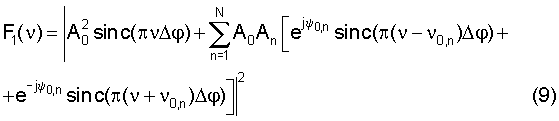
содержит только два компонента - образ постоянной составляющей 1, равной ЭПР отражателя, и сопряженные изображения объекта 2 и 2` (фиг.3). При этом сопряженные изображения разделены. Преимуществом предлагаемого способа является более полное использование рабочего объема РИК, т.е. возможность работы с крупногабаритными объектами.
Для разделения восстановленных по действительной разностной диаграмме (8) сопряженных изображений необходимо, чтобы координаты ДО в секторе синтеза РЛИ удовлетворяли условию

Таким образом, в заявляемом способе, как следует из (10), при размещении опорного отражателя на краю платформы в перпендикулярном направлении к линии визирования объекта достаточно выполнение условия

то есть размеры рабочей зоны РИК измеряемых объектов по сравнению с прототипом могут быть увеличены в два раза.
Полученный результат имеет простую физическую интерпретацию. При реализации способа в секторе углов Δϕ все локальные отражатели находятся по одну сторону от линии визирования «РЛС - ДО» и, следовательно, дают (относительно подвижного опорного отражателя) доплеровский сдвиг частоты одного знака. В этом случае возникающие в процессе восстановления сопряженные изображения будут располагаться на оси частот по разные стороны относительно нуля (ν=0).
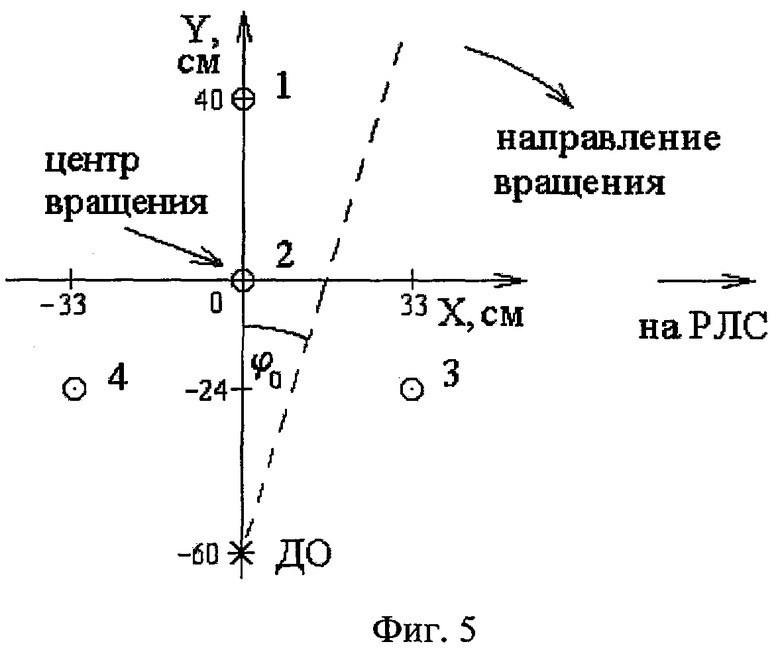
Полученные результаты математического моделирования на ЭВМ также подтверждают работоспособность заявляемого способа восстановления РЛИ объекта по их амплитудным ДОР при размерах измеряемых объектов, соизмеримых с размерами платформы. Для проверки использовался объект, состоящий из четырех одинаковых изотропных точечных отражателей. Длина волны зондирующего сигнала принималась равной λ=3 см. Геометрическая структура объекта, а также место установки подвижного опорного отражателя показаны на фиг.4. Одномерное изображение модели объекта, восстановленное в интервале углов наблюдения шириной Δϕ=16° для угла визирования ϕ0=15°, изображено на фиг.5. Моделирование на ЭВМ показало возможность уверенного восстановления РЛИ при следующих характеристиках поля облучения: уровень спада амплитуды на краях рабочего объема ≤3 дБ, набег фаз - ≤π/8, что обеспечивает стабильность тонкой структуры ДОР и точность измерения ЭПР объектов не ниже 0,5 дБ в относительных максимумах.
В ходе проведенных исследований выявлено также важное для практики достоинство предложенного способа по сравнению с известным, которое состоит в его работоспособности независимо от общего числа локальных источников, наблюдаемых на объекте с заданного направления. Это обеспечивается за счет использования разностной амплитудной ДОР, в которой отсутствует составляющая, образованная взаимной интерференцией сигналов, отраженных от локальных источников вторичного излучения.
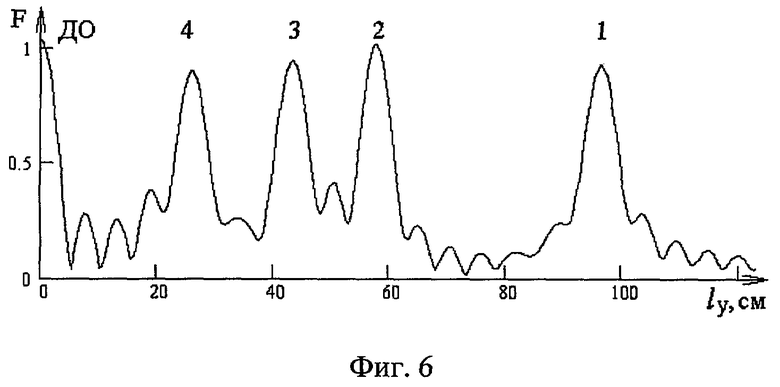
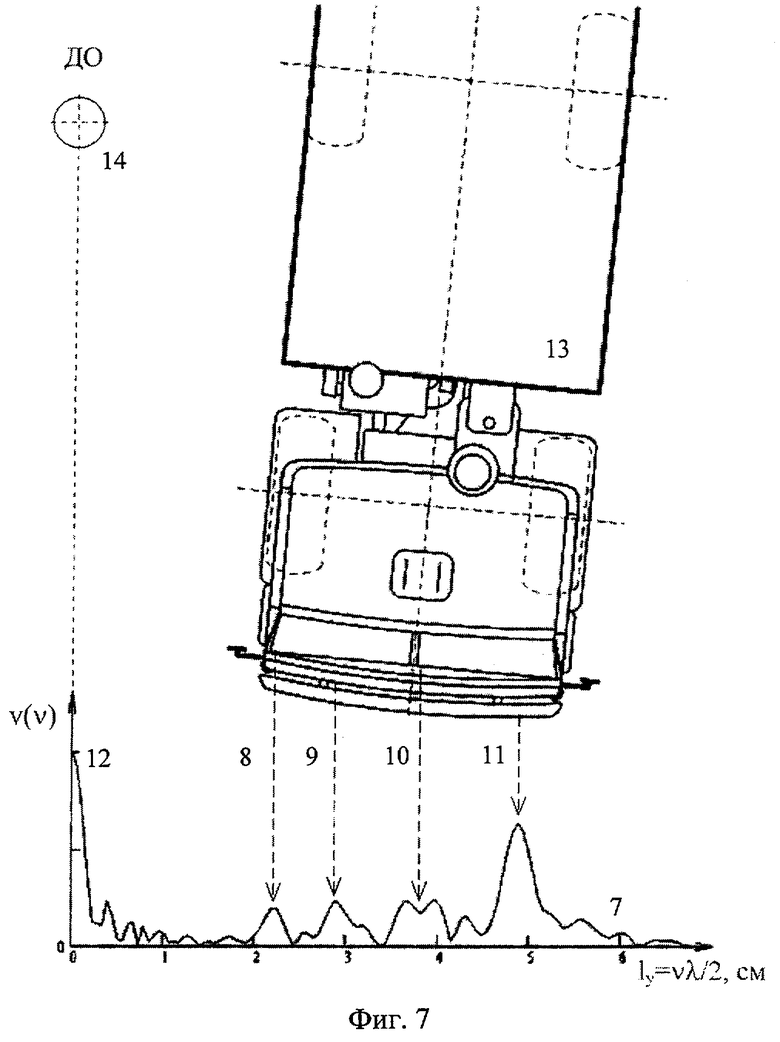
На фиг.1 изображено устройство, реализующее заявленный способ восстановления РЛИ объектов со стационарным центром вращения, на фиг.2 изображена схема формирования амплитудной ДОР объекта с использованием подвижного опорного отражателя, на фиг.3 изображено одномерное изображение объекта, восстановленное с использованием подвижного опорного отражателя S1(ϕ), на фиг 4 представлено одномерное изображение объекта, восстановленное по фрагменту действительной разностной ДОР ΔS(ϕ), на фиг.5 изображено одномерное изображение модели объекта, восстановленное в интервале углов наблюдения шириной Δϕ=16° для угла визирования ϕ0=15°, фиг.6 иллюстрирует реконструкцию одномерного РЛИ реального объекта (автомобиля КАМАЗ), полученного обработкой ΔS в секторе углов Δϕ=±4° при среднем угле визирования ϕ0=5°. На фиг.7 изображены восстановленное радиоизображение реального объекта совместно с подвижным опорным отражателем 7, идентифицированные на объекте ЛИ 8, 9, 10, 11, реконструированное радиоизображение подвижного опорного отражателя 12, объект наблюдения - 13 и подвижно-опорный отражатель 14.
Устройство содержит (фиг.1) измерительную РЛС (приемо-передающее устройство) 1, измерительную трассу 2, опорно-поворотное устройство (ОПУ) 3 с платформой 4, объект измерения 5, подвижный опорный отражатель 6, размещаемый вместе с объектом на платформе 4 ОПУ 3 измерительного комплекса. В устройстве, реализующем предложенный способ, используются типовые узлы и элементы, выполненные на современном уровне развития техники.
Устройство, реализующее предложенный способ, работает следующим образом.
Предварительно проводится мероприятие, направленное на снижение уровня фона, обусловленного отражениями от элементов РИК. Излучаемые сигналы с передатчика измерительной РЛС 1 облучают объект 5 и подвижный опорный отражатель 6, устанавливаемые на платформе 4 ОПУ 3. С помощью приемного устройства измерительной РЛС 1 сигналы, отраженные от объекта 5 и от отражателя 6, принимают и регистрируют совместную ДОР (S1(ϕ) и ДОР S0(ϕ) объекта, составляют по ним разностную ДОР ΔS(ϕ)=S1(ϕ)-S0(ϕ) и по ней путем преобразования Фурье восстанавливают РЛИ объекта.
Существо предложенного способа восстановления РЛИ объектов по их ДОР, полученным на РИК с некогерентной приемо-передающей системой, состоит в следующем. Для реального поля облучения, созданного измерительной РЛС 1 и определяемого геометрией РИК, измеряют ДОР одного исследуемого объекта 5 и того же объекта совместно с подвижным опорным отражателем 6. Составляют разность измеренных ДОР (9). По формуле обратного преобразования Фурье вычисляют функцию вторичных источников V(ν) объекта и квадрат ее модуля, восстанавливая распределение ЛИ на перпендикуляре к направлению визирования или в картинной плоскости, а затем путем сравнения полученных для заданного угла визирования ϕ0 РЛИ с характерными конструктивными особенностями объекта идентифицируют местоположение выявленных ЛИ непосредственно на поверхности объекта.
Таким образом, у заявленного решения появляются новые свойства, заключающиеся в увеличении рабочей зоны РИК в два раза, измерении в реальном поле облучения РИК диаграммы обратного рассеяния объекта наблюдения S0(ϕ) и совместной ДОР объекта и размещаемого определенным образом на платформе ОПУ РИК (по перпендикуляру к направлению визирования «РЛС - центр вращения») подвижного опорного отражателя - S1(ϕ), составлении разностной ДОР ΔS(ϕ)=S1(ϕ)-S0(ϕ) и восстановлении на этой основе РЛИ объекта, которые не совпадают со свойствами известных решений и обуславливают достижение положительного эффекта, заключающегося в обеспечении идентификации ЛИ крупноразмерных объектов по результатам восстановления РЛИ, получаемым обработкой (обращением) разностных амплитудных ДОР, измеряемых на РИК с некогерентными приемо-передающими устройствами.
Предложенный способ направлен на увеличение максимальных размеров рабочей зоны РИК и реализацию методов восстановления РЛИ на существующих РИК. Последнее достигается тем, что благодаря использованию разностных ДОР ΔS(ϕ) восстанавливаются неперекрывающиеся РЛИ и идентифицируются ЛИ на поверхности объектов наблюдения по их амплитудным ДОР, то есть без использования фазовых характеристик рассеиваемого объектами поля. Способ восстановления РЛИ объектов сложной формы реализуется путем расширения известных измерительных процедур, не требующих дополнительных материальных затрат и научных исследований.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗ КОМПЛЕКСНЫХ ОГИБАЮЩИХ ОТРАЖЕННЫХ СИГНАЛОВ ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ ОБЪЕКТА ДЛЯ ПОЛУЧЕНИЯ ЕГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 2008 |
|
RU2393500C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ ОБЪЕКТОВ | 2001 |
|
RU2210789C2 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ НАЗЕМНЫХ ОБЪЕКТОВ РАДИОЛОКАТОРОМ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2006 |
|
RU2308050C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ, ОБЕСПЕЧИВАЮЩИЙ ВОССТАНОВЛЕНИЕ АМПЛИТУДЫ И ФАЗЫ ОТРАЖЕННОГО СИГНАЛА | 2023 |
|
RU2819757C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ ИНВЕРСНОМ СИНТЕЗЕ АПЕРТУРЫ | 2024 |
|
RU2836418C1 |
| Способ определения высоты рельефа местности радиолокатором с синтезированной апертурой антенны | 2019 |
|
RU2707556C1 |
| СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2499279C1 |
| Способ обработки радиолокационных сигналов в моноимпульсной РЛС | 2017 |
|
RU2659807C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
Изобретение относится к измерениям радиолокационных характеристик объектов техники с восстановлением их радиолокационных изображений (РЛИ). Техническим результатом изобретения является увеличение размеров рабочей зоны радиолокационных измерительных комплексов (РНК). Способ основан на регистрации амплитудной диаграммы обратного рассеяния (ДОР) объекта совместно с подвижным опорным отражателем S(ϕ) как функции текущего угла наблюдения ϕ на интервале углов Δϕ≪1 рад и преобразования Фурье S(ϕ) и вычислении квадрата модуля его для каждого фиксированного угла ϕ0, при этом на интервале углов наблюдения Δϕ регистрируют: ДОР объекта без опорного отражателя S0(ϕ) и ДОР объекта совместно с подвижным опорным отражателем S1(ϕ), устанавливаемым на платформе опорно-поворотного устройства РИК на расстоянии от оси вращения, большем половины максимального линейного размера объекта в направлении, перпендикулярном линии визирования объекта, составляют по ним разностную ДОР и путем вычисления преобразования Фурье ΔS(ϕ) и квадрата модуля этого преобразования восстанавливают РЛИ объекта. 7 ил.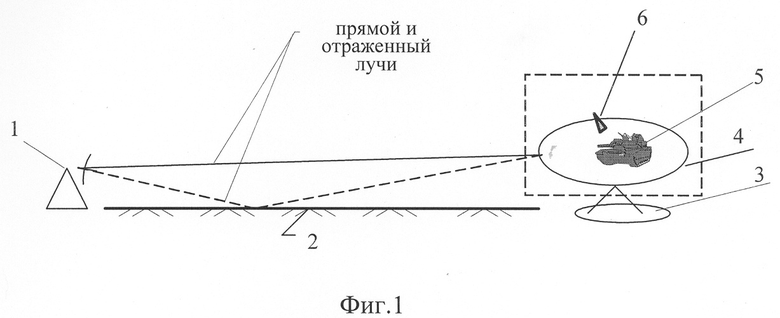
Способ восстановления радиолокационных изображений (РЛИ) объектов со стационарным центром вращения, основанный на регистрации амплитудной диаграммы обратного рассеяния (ДОР) объекта совместно с подвижным опорным отражателем S(ϕ), как функции текущего угла наблюдения ϕ на интервале углов Δϕ≪1 рад и преобразования Фурье S(ϕ) и вычислении квадрата модуля его для каждого фиксированного угла  отличающийся тем, что на интервале углов наблюдения Δϕ регистрируют ДОР объекта без опорного отражателя S0(ϕ) и ДОР объекта совместно с подвижным опорным отражателем S1(ϕ), устанавливаемым, как и объект, на платформе опорно-поворотного устройства РИК на расстоянии от оси вращения, большем половины максимального линейного размера объекта в направлении, перпендикулярном линии визирования объекта, и составляют по ним разностную ДОР
отличающийся тем, что на интервале углов наблюдения Δϕ регистрируют ДОР объекта без опорного отражателя S0(ϕ) и ДОР объекта совместно с подвижным опорным отражателем S1(ϕ), устанавливаемым, как и объект, на платформе опорно-поворотного устройства РИК на расстоянии от оси вращения, большем половины максимального линейного размера объекта в направлении, перпендикулярном линии визирования объекта, и составляют по ним разностную ДОР
ΔS(ϕ)=S1(ϕ)-S0(ϕ)
и путем вычисления преобразования Фурье ΔS(ϕ) и квадрата модуля этого преобразования восстанавливают РЛИ объекта.
| ВАРГАНОВ М.Е | |||
| и др | |||
| Радиолокационные характеристики летательных аппаратов./ Под ред | |||
| Л.Т | |||
| ТУЧКОВА | |||
| - М.: Радио и связь, 1985, с.138, 139 | |||
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ ОБЪЕКТОВ | 2001 |
|
RU2210789C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ, ХАРАКТЕРИЗУЮЩИХ ВОЛНЫ, КОТОРЫЕ ОТРАЖЕНЫ ИЛИ ПРОПУЩЕНЫ ОБЪЕКТОМ, ДЛЯ ИССЛЕДОВАНИЯ И АНАЛИЗА СТРУКТУРЫ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ И АНАЛИЗА СТРУКТУРЫ ОБЪЕКТА | 1997 |
|
RU2178880C2 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| WO 03003312 A1, 09.01.2003 | |||
| US 2005248482 A1, 10.11.2005 | |||
| Устройство для получения потока сыпучих материалов с заданной плотностью | 1977 |
|
SU690315A1 |

