Изобретение относится к радиосвязи и может быть использовано в радиотехнических системах, предназначенных для организации линии связи в режиме приема сигналов.
Известны приемные устройства анализа электромагнитной обстановки, например, Principles of Military Communication by Don J Torrieri. ISBN: 1114742368: Technical Product Details ISBN: 1114742368 Publisher: UNIVERSITY MICROFILMS INC Copyright: 1981, в которых анализируется (измеряется) мощность на входных частотах fВХ=fГСК+fПФ (fГСК - частота гетеродина, fПФ - промежуточная частота) в полосе частот ΔfПФ, определяемой полосовым фильтром. В простейшем случае за К шагов длительностью ΔТ каждый просматривается диапазон частот К ΔfПФ.
В книге «Помехозащищенность систем радиосвязи», Борисов В.И., Зинчук В.М. М., Радио и связь. 1999 г. [1] также приведен алгоритм контроля электромагнитной обстановки (ЭМО), который заключается в последовательной настройке на отрезок времени Т центральной частоты полосового фильтра, на заданные частоты из выбранного диапазона частот и в анализе мощности в полосе этого фильтра на каждой из частот. Как правило, шаг между частотами равен полосе пропускания фильтра. Временной график такой работы приведен на фиг.1, взятый из [1], на графике по оси Х отложены отрезки времени Т, а на оси Y частоты от fMIN до fMAX.
Согласно графику на фиг.1 приемное устройство за время Т перестраивается скачками по частоте и в течение отрезков времени ΔТ=Т/6 принимает сигналы в полосе ΔfПФ последовательно частот f1-fMIN, затем f2-f1, f3-f2, f4-f3, f5-f4 и fMAX-f5. Таким образом осуществляется последовательный во времени анализ электромагнитной обстановки в полосе частот fMAX-fMIN, в соответствии с графиком на фиг.1 анализ повторяется периодически [1], стр.64, 65.
В [1] приведены блок-схемы (стр.105 рис.1.5.2) устройств, которые реализуют указанный выше последовательный алгоритм контроля. Кроме того, в [1] рассмотрена возможность увеличения скорости анализа (улучшения точности анализа) за счет выполнения полосового фильтра в виде суммы N фильтров (например, стр.111 рис.1.5.7), в которых происходит деление общей полосы полосового фильтра на несколько примыкающих по частоте полос. Причем мощность сигнала измеряется в каждой из полос отдельно. Отметим, что в функциональных схемах 1.5.2 и 1.5.7 преобразователь частоты, гетеродин и полосовой фильтр, т.е. 1, 2, 3 блоки, объединены в линейный тракт приемника - блок ЛТП.
Наиболее близким по технической сущности к предлагаемому является приемное устройство, представленное на рис.1.5.3 стр.105 [1], принятое за прототип.
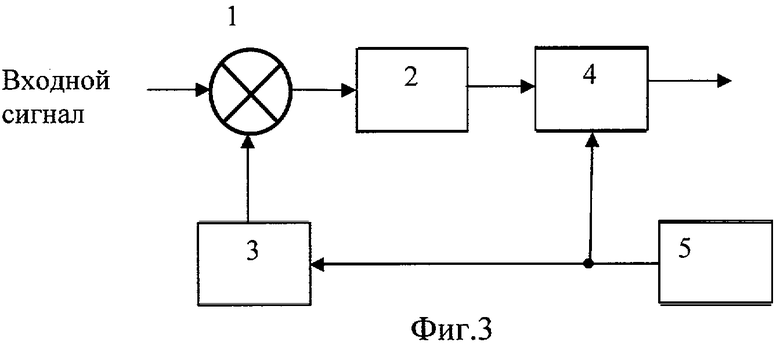
Схема устройства-прототипа представлена на фиг.2, где обозначено:
1 - антенна;
2 - преобразователь частоты;
3 - полосовой фильтр;
4 - блок возведения в квадрат;
5 - интегрирующий блок;
6 - синтезатор частот;
7 - блок управления прыжками по частоте (БУППЧ);
8 - генератор синхросигналов;
9 - блок управления программой функционирования поиска (БУПФП);
10 - блок сравнения;
11 - ключ.
Устройство-прототип содержит последовательно соединенные преобразователь частоты 2, полосовой фильтр 3, блок возведения в квадрат 4, интегрирующий блок 5, блок сравнения 10 и ключ 11. Кроме того, последовательно соединенные генератор синхросигналов 8, БУППЧ 7 и синтезатор частот 6, выход которого соединен со вторым входом преобразователя частоты 2, а также БУПФП 9, первый вход которого соединен со вторым выходом блока сравнения 10, а второй вход - со вторым выходом генератора синхросигналов 8, третий выход которого соединен с управляющим входом синтезатора частот 6. При этом третий выход БУПФП 9 соединен со вторым входом БУППЧ 7. Первый выход блока сравнения 10 соединен с входом генератора синхросигналов 8, а один из выходов БУППЧ 7 соединен со вторым входом ключа 11, выход которого является выходом устройства.
Работает устройство следующим образом.
БУППЧ 7 по команде с БУПФП 9 дает команду синтезатору 6 на последовательную установку частот на заданные отрезки времени. В течение каждого отрезка времени принятые от антенны 1 сигналы фильтруются полосовым фильтром 3, детектируются в последовательно включенных блоках 4 и 5 и подаются в блок сравнения 10, в котором в зависимости от уровня сигнала, поступающего с блока 5, вырабатываются два варианта команд на выходе блока сравнения 10:
- при наличии сигнала на первом выходе 1, а на втором 0;
- при отсутствии сигнала на первом выходе 0, а на втором 1.
В первом варианте командой с первого выхода блока 10 открывается ключ 11 и на выход устройства сообщается код частоты. Во втором варианте поиск продолжается, и ключ 11 не открывается. Изложенная выше работа устройства происходит синхронно под воздействием генератора синхросигналов 8.
Укрупним схему устройства-прототипа для рассмотрения предлагаемого нами устройства. Для этого целесообразно объединить функции части блоков, а именно полосовой фильтр 3 и блоки 4 и 5 - в блок полосовой фильтрации с амплитудным детектированием 2, блоки 6 и 7 - в блок генерации скачущей частоты 3, блоки 10 и 11 в блок анализа 4, блоки 8, 9 - в блок синхронизации 5.
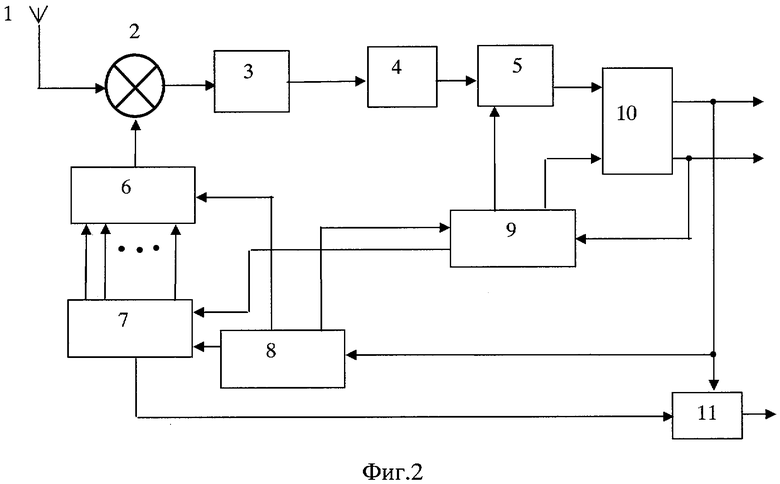
Укрупненная блок-схема устройства-прототипа приведена на фиг.3, где обозначено:
1 - преобразователь частоты;
2 - блок полосовой фильтрации с амплитудным детектированием;
3 - блок генерации скачущей частоты;
4 - блок анализа;
5 - блок синхронизации.
Устройство-прототип содержит последовательно соединенные преобразователь частоты 1, блок полосовой фильтрации с амплитудным детектированием 2, блок анализа 4, выход которого является выходом устройства. Кроме того, последовательно соединенные блок синхронизации 5 и блок генерации скачущей частоты 3, выход которого соединен со вторым входом преобразователя частоты 1, при этом выход блока синхронизации 5 соединен со вторым входом блока анализа 4.
Работает устройство-прототип следующим образом.
Блок синхронизации 5 выдает команду на блок генерации скачущей частоты 3, который устанавливает частоту колебания f0Г на время ΔТ, и тем самым на время ΔТ устанавливается полоса анализа входных сигналов, равная ΔfПФ, полосе пропускания блока полосовой фильтрации с амплитудным детектированием 2 на частоте f0, определяемой частотой блока генерации скачущей частоты 3 и средней частотой блока полосовой фильтрации с амплитудным детектированием 2. В течение отрезка времени ΔT входной сигнал на указанных частотах накапливается на выходе устройства 2. По истечении отрезка времени ΔT, по команде с блока синхронизации 5, во-первых, блок анализа 4 считывает напряжения с выхода устройства 3 и передает их на выход в течение последующего отрезка времени ΔТ, во-вторых, в блоке генерации скачущей частоты 3 изменяется частота с f0Г на частоту f1Г.
В течение второго отрезка времени ΔT блок полосовой фильтрации с амплитудным детектированием 2 анализирует сигнал в другой области частот, причем полоса анализа сохраняется, а меняется частота f0 на частоту f1. По истечении второго отрезка времени ΔT, по команде с блока синхронизации 5, во-первых, блок анализа 4 считывает напряжения с выхода блока 3 и передает их на выход в течение последующего отрезка времени ΔT, во-вторых, в блоке генерации скачущей частоты 3 изменяется частота с f1Г на частоту f2Г.
Так происходит К раз, пока не будет просмотрен весь участок частот, определенных для анализа.
Для простоты, не теряя общности, рассмотрим конкретный случай К=3.
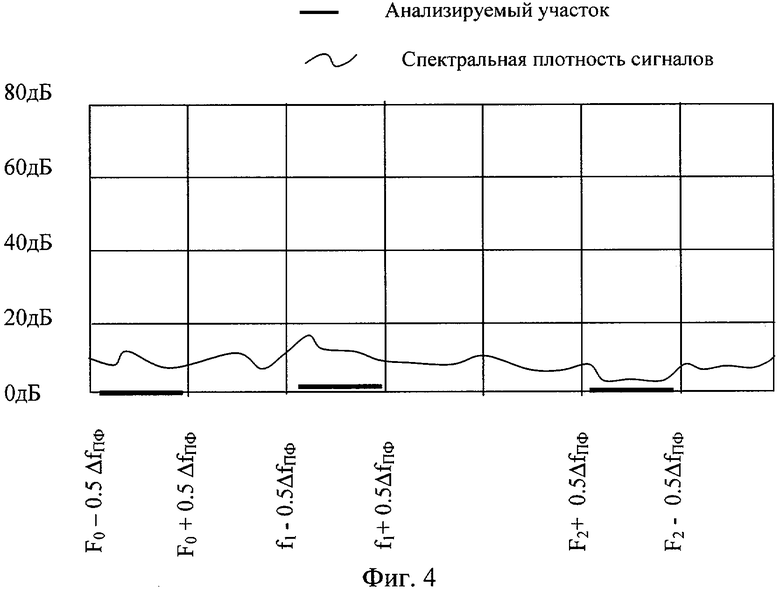
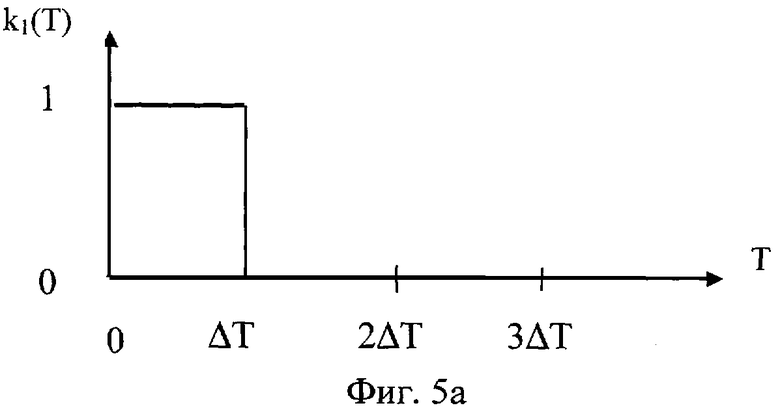
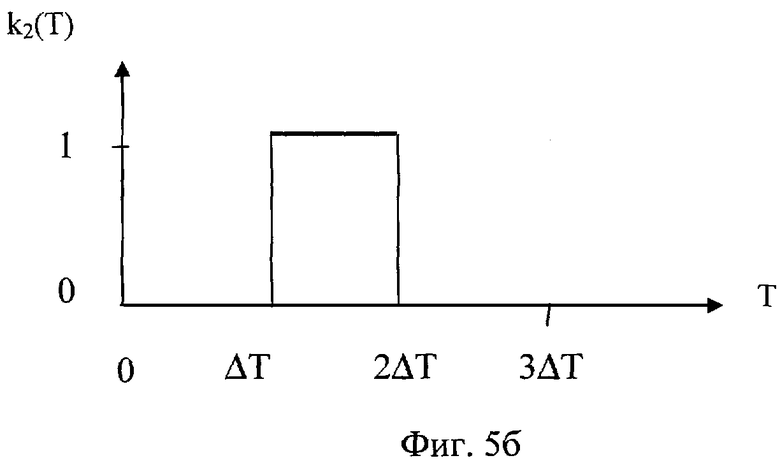
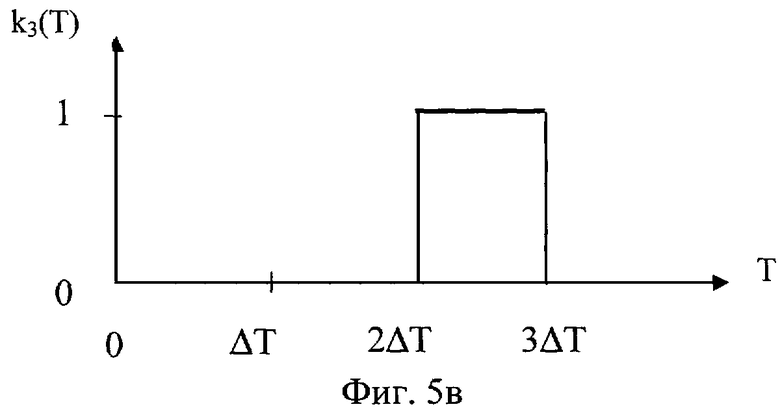
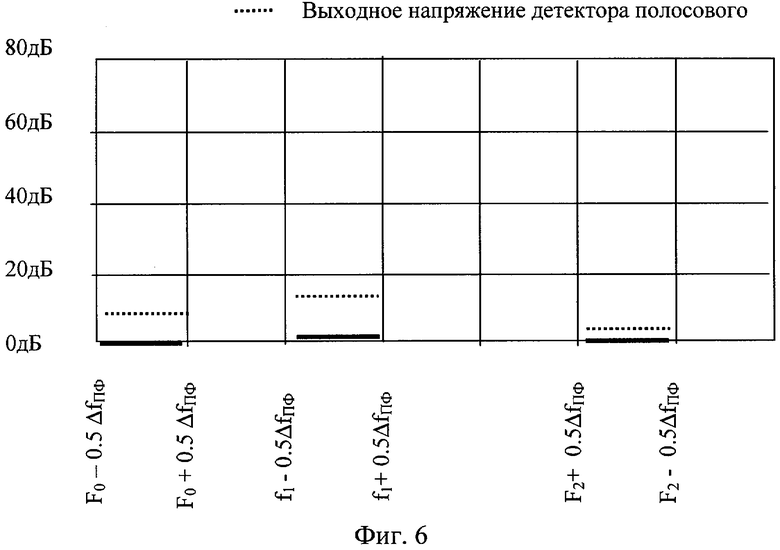
На фиг.4 представлен энергетический спектр в диапазоне частот от (f0-0.5ΔfПФ) до (f0+0.5ΔfПФ), (f1-0.5ΔfПФ) до (f1+0.5ΔfПФ), (f2-0.5ΔfПФ) до (f2+0.5ΔfПФ). На фиг.5а, 5б, 5в графически изображены отрезки времени приема ΔТ сигнала на частотах f0, f1, f2.
Отметим, что прядок и расположение на частотной оси f0, f1, f2... fК не играют роли. Например, анализируемые частотные участки могут примыкать друг к другу, быть расположены по возрастанию, убыванию средней частоты и/или в любой другой последовательности. С учетом энергетической плотности сигналов на входе устройства (фиг.4) на фиг.6 показано измеренное значение. Выходное напряжение блока полосовой фильтрации с амплитудным детектированием 2 подается на вход блока анализа 4 для дальнейшей обработки и выдачи выходных данных.
Таким образом, на выходе блока 2 формируется напряжение, пропорциональное мощности сигналов в полосе фильтра блока 2. В качестве примера на фиг.4 показана энергетическая плотность сигналов на входе устройства 2, а на фиг.6 - измеренное значение напряжения на выходе схемы анализа 4. Такая работа позволяет получить энергетический спектр в полосе частот от f1-0.5ΔfПФ до f1+2ΔfПФ+0.5ΔfПФ за время 3ΔТ.
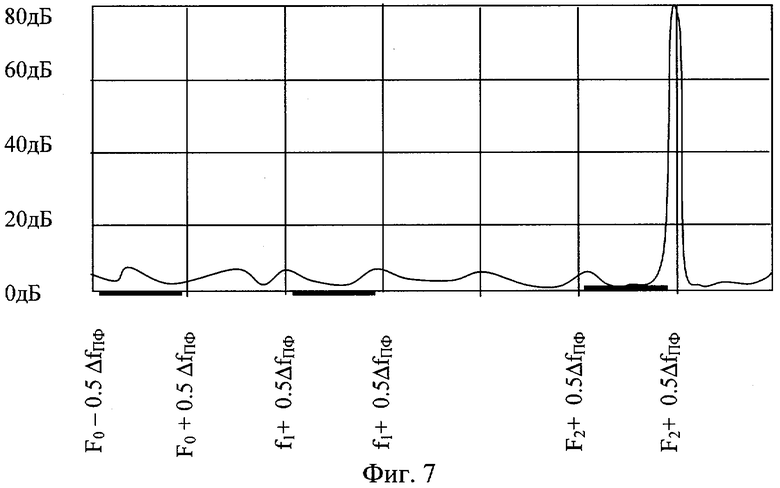
Рассмотрим работу устройства-прототипа при наличии в полосе узкополосной помехи величиной В.
Пусть помеха по уровню превосходит минимальный сигнал на В=80 дБ и имеет частоту fПМ (фиг.7), тогда будучи подключенной ко входу на время ΔT она создаст спектр
S(fПМ+f)=sin(πfΔT/2)/(πfΔT/2)
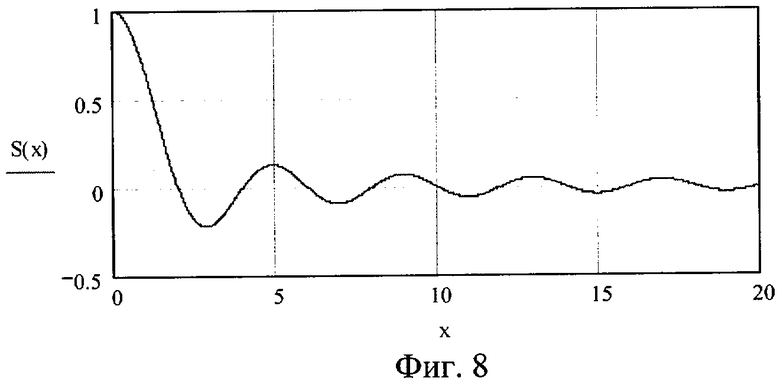
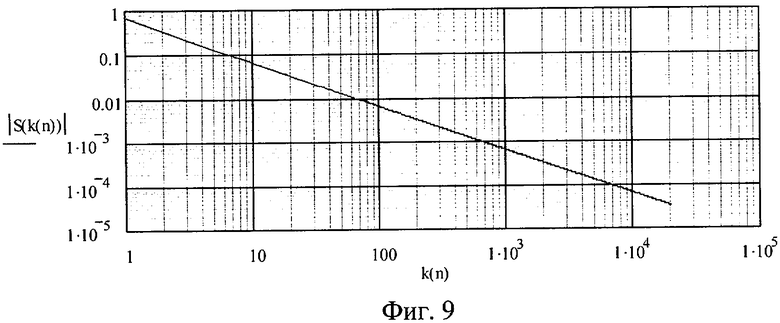
Максимальное значение S(fПМ+f) принимает в точках f=(2n-1)/ΔT, где n - нечетное число, n=(2k-1) при k=1,2. Величина этих максимумов 2/[π(2n-1)]. На фиг.8 приведено значение S(fПМ+f) при небольших величинах f, а на фиг.9 - зависимость максимумов при больших отстройках.
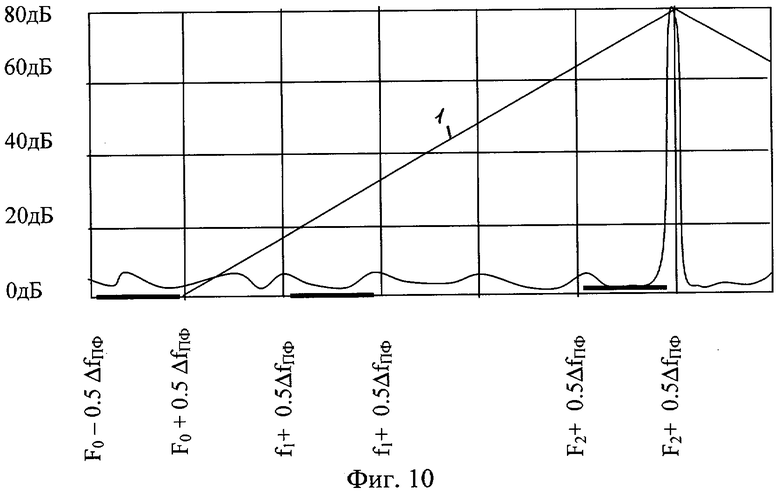
Для исключения влияния помехи величиной 80 дБ на обнаружение сигналов уровнем 0 дБ необходимо ее ослабить на (86-90) дБ. В соответствии с фиг.9 требуется отстройка на |Δf|>2·104 (1/ΔТ). При ΔT=2 мс отстройка |Δf|>10 МГц, т.е. в полосе fПМ±10 МГц анализ спектра будет затруднен. Помеха будет маскировать сигнал, причем тем сильнее, чем ближе частота этого сигнала к fПМ. Действие помехи можно представить на графике фиг.10, линия 1, если принять на фиг.4-7 значение полосы ΔfПФ=2 МГц.
Увеличение мощности помехи или одновременное воздействие нескольких мощных узкополосных помех значительно ухудшит ситуацию.
Таким образом, работа прототипа в условиях узкополосных помех неэффективна.
Недостатком устройства-прототипа является низкая помехозащищенность от мощных сосредоточенных по частоте помех, даже если частота этой помехи не совпадает с каким-либо принимаемым интервалом частот.
Нами предлагается устройство, свободное от этого недостатка.
Для устранения указанного недостатка в приемное устройство для анализа электромагнитной обстановки, содержащее последовательно соединенные первый преобразователь частоты и первый блок полосовой фильтрации с амплитудным детектированием, а также блок анализа, выход которого является выходом устройства, первый блок генерации скачущей частоты, выход которого соединен со вторым входом первого преобразователя частоты, и блок синхронизации, выход которого соединен со вторым входом блока анализа, согласно изобретению введены (k-1) последовательно соединенных преобразователей частоты и блоков полосовой фильтрации с амплитудным детектированием, (k-1) блоков генерации скачущей частоты, выход каждого из которых соединен со вторым входом соответствующего преобразователя частоты, k управляемых аттенюаторов, а также сумматор, блок управления аттенюаторами и блок формирования интервалов времени, причем выходы k блоков полосовой фильтрации с амплитудным детектированием соединены с соответствующими входами сумматора, выход которого соединен с первым входом блока анализа, выход блока синхронизации соединен с входами блоков управления аттенюаторами и формирования интервалов времени, k выходов которого соединены с входами соответствующих k генераторов скачущей частоты, причем выходы (k-1) генераторов скачущей частоты соединены со вторыми входами соответствующих преобразователей частоты, k выходов блока управления аттенюаторами соединены со вторыми входами соответствующих k аттенюаторов, выход каждого из которых соединен с первым входом соответствующего преобразователя частоты, первые входы k аттенюаторов объединены и являются входом устройства.
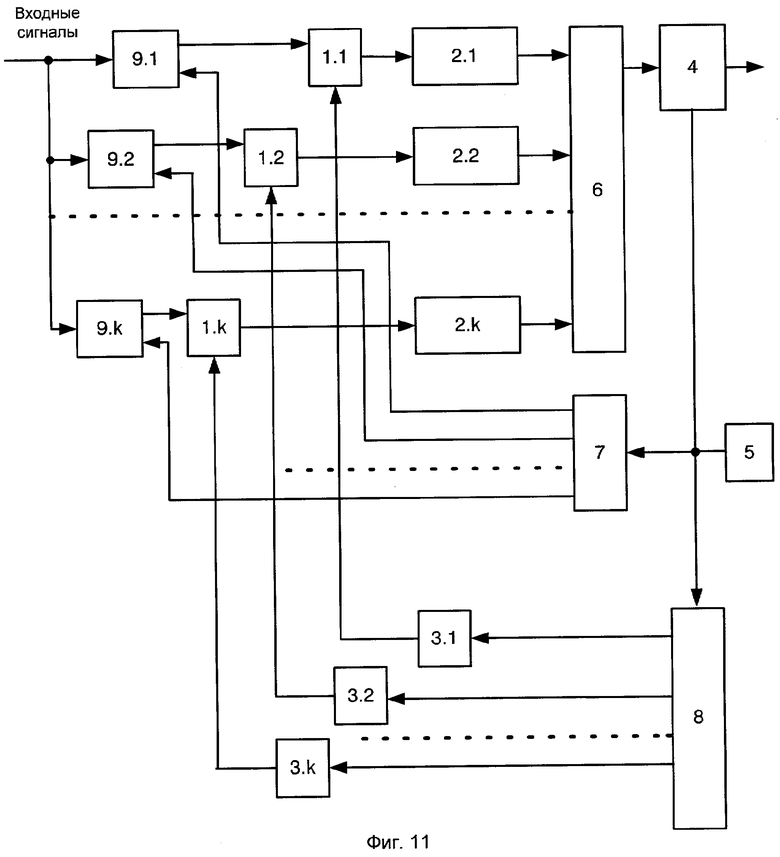
Функциональная схема предлагаемого устройства приведена на фиг.11, где обозначено:
1.1-1.k - преобразователь частоты;
2.1-2.k - блок полосовой фильтрации с амплитудным детектированием;
3.1-3.k - генератор скачущей частоты;
4 - блок анализа;
5 - блок синхронизации;
6 - сумматор;
7 - блок управления аттенюаторами;
8 - блок формирования интервалов времени;
9.1-9.k - управляемые аттенюаторы.
Предлагаемое устройство содержит k параллельно соединенных аттенюаторов 9.1-9.k, первые входы которых объединены и являются входом устройства, а выход каждого из k аттенюаторов 9 соединен с первым входом соответствующего преобразователя частоты 1.1-1.k, выходы которых через соответствующие блоки полосовой фильтрации с амплитудным детектированием 2.1-2.k соединены с соответствующими входами сумматора 6, выход которого соединен с первым входом блока анализа 4, выход которого является выходом устройства. Кроме того, выход блока синхронизации 5 соединен с входами блока управления аттенюаторами 7, блока формирования интервалов времени 8 и вторым входом блока анализа 4. При этом выходы блока управления аттенюаторами 7 соединены со вторыми входами соответствующих аттенюаторов 9.1-9.k, а выходы блока формирования интервалов времени 8 соединены с входами соответствующих генераторов скачущей частоты 3.1-3.k, выходы которых соединены со вторыми входами соответствующих преобразователей частоты 1.1-1.k.
Работает предлагаемое устройство следующим образом.
Входные сигналы во всей полосе частот поступают на входы параллельно включенных k управляемых аттенюаторов 9.1-9.k, на второй вход каждого из которых подается управляющее напряжение от блока управления аттенюаторами 7. Это напряжение на отрезке времени k ΔT изменяет коэффициент затухания соответствующего аттенюатора 9 в зависимости от времени. Для первого аттенюатора в начале от 0 до ΔT [(k/2)-1/2] затухание падает, затем, во второй отрезок времени, от ΔT [(k/2)-1/2] до ΔT [(k/2)+1/2] затухание изменяется слабо и минимально по величине, в третий отрезок времени от ΔТ [(k/2)+1/2] до ΔТ k, во втором аттенюаторе затухание изменяется от времени аналогично, но начало его работы происходит с запозданием на ΔТ, соответственно первая область будет от ΔT до ΔT [(k/2)+1/2], вторая - от ΔT [(k/2)+1/2] до ΔT (k+1) и т.д. Таким образом, в течение отрезка времени kΔТ, конкретно от ΔТ [(k/2)-1/2] до ΔT [k+(k/2)-1/2], входной сигнал будет поступать поочередно на входы соответствующих преобразователей 1.1-1.k, на второй вход которых подается сигнал от соответствующего генератора скачущей частоты 3.1-3.k, на отрезок времени ΔТ k. Для преобразователя 1.1 - от 0 до ΔT k, для преобразователя 1.2 - от ΔT до ΔТ (k+1), для последнего k-го - от ΔT (k-1) до ΔT (2k-1). Сигналы после селекции и детектирования с выходов блоков полосовой фильтрации с амплитудным детектированием 2.1-2.k суммируются в сумматоре 6 и подаются в блок анализа 4 для создания выходной информации, на второй вход которого подается последовательность импульсов с выхода блока синхронизации 5. Та же последовательность импульсов с выхода блока синхронизации 5 подается одновременно на входы блока управления аттенюаторами 7 и блока формирования интервалов времени 8.
Выходные сигналы блоков 7 и 8, как было показано выше, определяют работу аттенюаторов 9.1-9.k и преобразователей 1.1-1.k.
Покажем эффективность работы предлагаемого устройства.
Для количественной оценки рассмотрим самый простой случай: k=2.
Сначала пронормируем текущее время t к временному отрезку ΔТ и введем обозначение x=t/ΔТ.
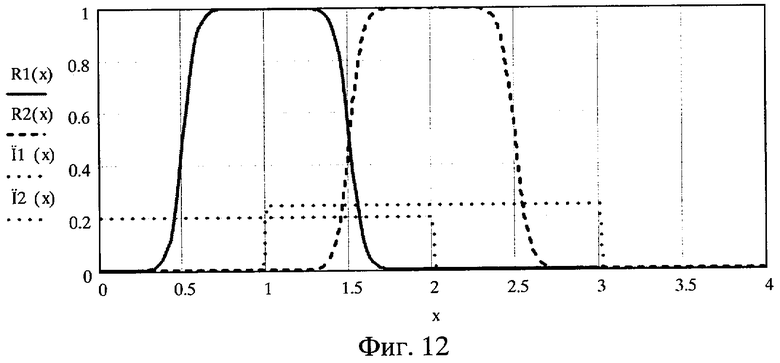
Пусть под воздействием сигнала управления блока 7 коэффициент передачи R1(x) первого 9.1 и R2(x) второго 9.2 аттенюаторов, обратный величине затухания, меняется в соответствии с формулами:


Отметим, что преобразователи 1.1 и 1.2 работают в течение всего отрезка времени 2ΔТ (в общем случае kΔТ). Условно определим их работу формулами:
Теперь можно на фиг.12 представить изменение от времени коэффициентов передачи R1(x) первого 9.1 и R2(x) второго 9.2 аттенюаторов, а также время работы соответствующих преобразователей 1.1 и 1.2.
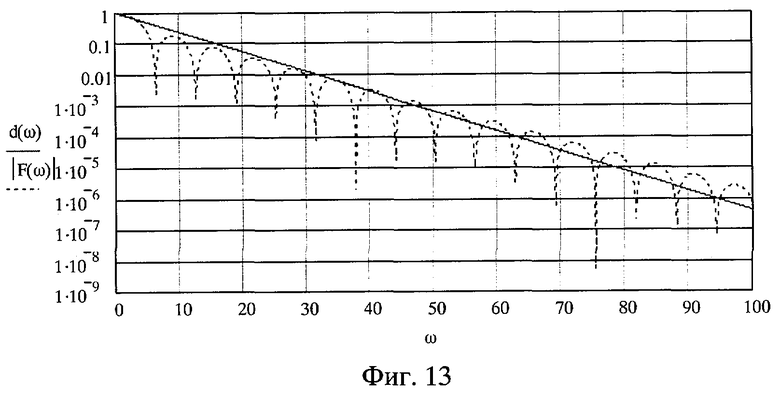
В этом случае спектр от сосредоточенной по частоте помехи можно определить в зависимости от ω=πf·ΔТ, где f - частота.

В этом случае спектр от сосредоточенной по частоте помехи показан на фиг.13.
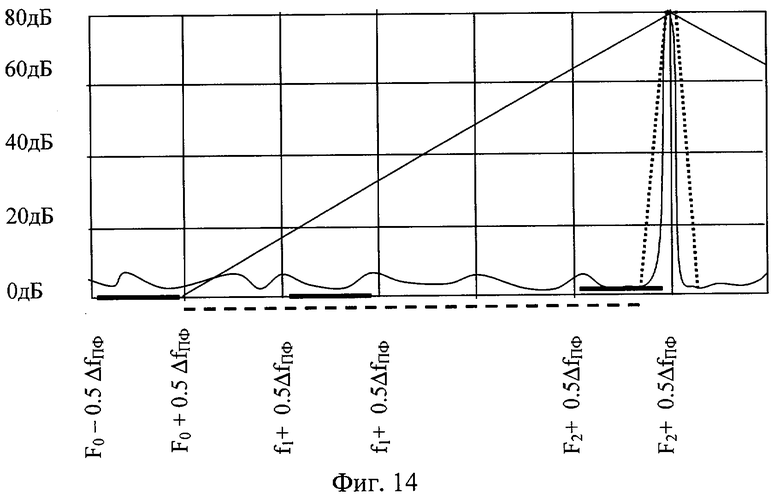
Из фиг.13 видно, что при работе предлагаемого устройства расширение спектра помехи мало. По сравнению с прототипом выигрыш составляет десятки раз. На фиг.14 приведена качественная картина работы прототипа и предлагаемого устройства, где показан пунктирной линией участок спектра, освобожденный от помехи, а точками - спектр, образованный помехой, при скачках приемного устройства по частоте.
Как и устройство-прототип, предлагаемое устройство ведет непрерывный по времени анализ электромагнитной обстановки в полосе, определяемой блоком фильтров, скачками по частоте, но анализ ведется поочередно k одинаковыми фильтрами, причем в течение времени ΔT [(k/2)-1/2]. Коэффициент передачи аттенюатора на входе соответствующего фильтра монотонно увеличивается от 0 до величины, близкой к 1, затем в течение времени ΔT от ΔT [(k/2)-1/2] до ΔT [(k/2)+1/2] постоянен или меняется незначительно, а затем в течение времени ΔТ [(k/2)-1/2] монотонно уменьшается от величины, близкой к единице до 0. Общее время работы блока полосовой фильтрации с амплитудным детектированием 2 составляет k ΔТ=ΔТ [(k/2)-1/2]+ΔT+ΔT[(k/2)-1/2], из которого собственно работа с минимальным затуханием составляет только ΔT, остальное время коэффициент передачи аттенюатора мал. Прием в остальное время поочередно выполняется через другие (k-1) блоки 2. Сигналы с выходов блоков 2 суммируются и подаются на вход блока анализа 4 для дальнейшей обработки.
Таким образом, предлагаемое устройство проводит контроль электромагнитной обстановки в присутствии узкополосных помех с высокой точностью.
Источники информации
1. «Помехозащищенность систем радиосвязи». Борисов В.И., Зинчук В.М. М., Радио и связь. 1999 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ (ВАРИАНТЫ) И УСТРОЙСТВО (ВАРИАНТЫ) СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2015 |
|
RU2583159C1 |
| Способ выделения речевого сигнала на фоне помех и устройство для его осуществления | 1983 |
|
SU1156126A1 |
| СПОСОБ И УСТРОЙСТВО (ВАРИАНТЫ) СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2014 |
|
RU2572083C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПЕРЕДАЧИ СООБЩЕНИЙ ЛЮБОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ, НАПРИМЕР, СПОСОБ ОПТИМАЛЬНОГО ЗВУКОВОСПРОИЗВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПТИМАЛЬНОГО, ПРОСТРАНСТВЕННОГО, АКТИВНОГО ПОНИЖЕНИЯ УРОВНЯ СИГНАЛОВ ЛЮБОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ | 1997 |
|
RU2145446C1 |
| СПОСОБ И ЛИНИЯ РАДИОСВЯЗИ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2005 |
|
RU2279760C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ РАДИОПЕРЕДАТЧИКА ПО ЕГО ИЗЛУЧЕНИЮ В БЛИЖАЙШЕЙ ЗОНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2364885C2 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2543078C1 |
| ПРОСТРАНСТВЕННАЯ ЗВУКОВОСПРОИЗВОДЯЩАЯ СИСТЕМА | 1996 |
|
RU2106073C1 |
| РАДИОМОДЕМ | 2024 |
|
RU2830959C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ИНТЕРМОДУЛЯЦИОННЫХ ИСКАЖЕНИЙ ЭЛЕКТРИЧЕСКОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2566386C1 |
Изобретение относится к радиосвязи в режиме приема сигналов. Достигаемый технический результат - повышение помехоустойчивости при воздействии мощных сосредоточенных по частоте помех. Указанный результат достигается за счет того, что приемное устройство содержит k преобразователей частоты и блоков полосовой фильтрации с амплитудным детектированием, блок анализа, блок синхронизации, k блоков генерации скачущей частоты, k управляемых аттенюаторов, сумматор, блок управления аттенюаторами и блок формирования интервалов времени, определенным образом соединенных между собой. 16 ил.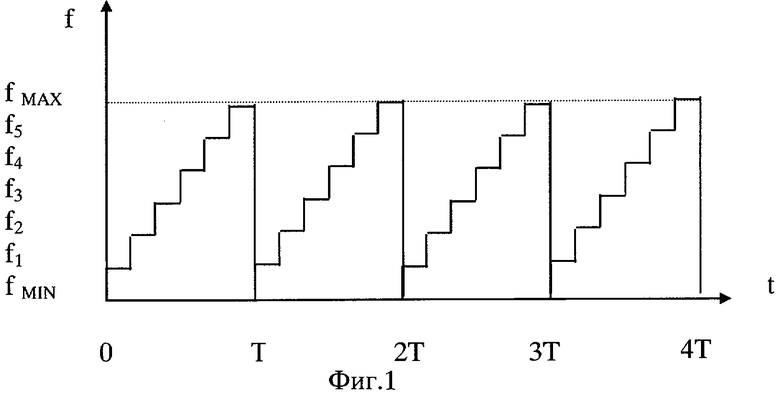
Приемное устройство для анализа электромагнитной обстановки, содержащее последовательно соединенные первый преобразователь частоты и первый блок полосовой фильтрации с амплитудным детектированием, а также блок анализа, выход которого является выходом устройства, первый блок генерации скачущей частоты, выход которого соединен со вторым входом первого преобразователя частоты, и блок синхронизации, выход которого соединен со вторым входом блока анализа, отличающееся тем, что введены (k-1) последовательно соединенных преобразователей частоты и блоков полосовой фильтрации с амплитудным детектированием, (k-1) блоков генерации скачущей частоты, выход каждого из которых соединен со вторым входом соответствующего преобразователя частоты, k управляемых аттенюаторов, а также сумматор, блок управления аттенюаторами и блок формирования интервалов времени, причем выходы k блоков полосовой фильтрации с амплитудным детектированием соединены с соответствующими входами сумматора, выход которого соединен с первым входом блока анализа, выход блока синхронизации соединен с входами блоков управления аттенюаторами и формирования интервалов времени, k выходов которого соединены с входами соответствующих k генераторов скачущей частоты, k выходов блока управления аттенюаторами соединены со вторыми входами соответствующих k аттенюаторов, выход каждого из которых соединен с первым входом соответствующего преобразователя частоты, первые входы k аттенюаторов объединены и являются входом устройства.
| БОРИСОВ В.И., ЗИНЧУК В.М | |||
| Помехозащищенность систем радиосвязи | |||
| Металлический водоудерживающий щит висячей системы | 1922 |
|
SU1999A1 |
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| АВТОМАТИЗИРОВАННЫЙ ЭКОЛОГИЧНЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ОПРЕДЕЛЕНИЯ УСТОЙЧИВОСТИ ТЕХНИЧЕСКИХ СРЕДСТВ К ВОЗДЕЙСТВИЮ ВНЕШНИХ ЭЛЕКТРОМАГНИТНЫХ ПОЛЕЙ | 2001 |
|
RU2206100C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ ВОКРУГ ОБЪЕКТА | 1991 |
|
RU2014624C1 |
| СПОСОБ НАТУРНОГО ПОЛУЧЕНИЯ ИСХОДНОЙ ИНФОРМАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ЗОН РАДИОПОКРЫТИЯ И ЭЛЕКТРОМАГНИТНОЙ СОВМЕСТИМОСТИ БАЗОВЫХ СТАНЦИЙ СЕТИ СВЯЗИ | 2002 |
|
RU2218664C1 |
| СПОСОБ УДАЛЕНИЯ ЭПИРЕТИНАЛЬНОЙ МЕМБРАНЫ | 1996 |
|
RU2140238C1 |
| US 6051967 А, 18.04.2000. | |||

