Заявляемые объекты объединены единым изобретательским замыслом, относятся к радиотехнике и могут быть использованы для создания искусственных помех, в частности, для искажения навигационного поля группе пользователей в заданном районе.
Известен способ создания имитационных помех (см. Палий А.И. Радиоэлектронная борьба. (Средства и способы подавления и защиты радиоэлектронных систем). - М.: Воениздат, 1981, стр.50-55).
Способ-аналог включает в себя прием сигнала источника радиоизлучения на частоте fs, задержку принятого сигнала на время Δtз, формирование несущего колебания fн на частоте принятого сигнала, формирование помехового сигнала путем модулирования несущего колебания задержанным принятым сигналом, усиление выходного помехового сигнала и его излучение.
Аналог позволяет создавать эффективные помехи цифровым сетям связи, работающим в симплексном (на одной частоте приема и передачи) режиме. Однако способ-аналог обладает существенным недостатком: отсутствует возможность создания эффективной помехи радионавигаторам группы пользователей глобальной навигационной спутниковой системы (ГНСС).
Формирование достаточно мощной заградительной помехи (в полосе спектра излучений спутников ГНСС) приведет к тому, что последняя будет обнаружена пользователями по факту неработоспособности системы навигации. Кроме того, данный подход потребует значительно больших энергетических затрат.
Известен способ радиоподавления каналов связи по патенту РФ №2229198, МПК H04K 3/00, опубл. 20.05.2004 г., бюл. №14.
Способ-аналог включает в себя одновременный прием в заданном районе сигналов всех пользователей, формирование несущего колебания из условия
где Δfi - разнос между i-й частотой базовой станции и i-й частотой мобильного абонента дуплексного канала связи, i=1, 2, …, N, N - число частотный каналов в стандарте сотовой системы связи, 
Способ обеспечивает подавление группы каналов абонентов с неизвестными номерами, находящимися в пространственно ограниченном, но известном районе, с привлечением для этого минимальных материальных и энергетических ресурсов. По характеру воздействия способ обеспечивает формирование имитирующих (дезинформирующих) помех, которые служат для внесения ложной информации в подавляемые средства (см. Палий А.И. Радиоэлектронная борьба: (Средства и способы подавления и защиты радиоэлектронных систем). - М.: Воениздат, 1981, стр.10-11); Владимиров В.И. Методология проектирования комплексов РЭП и их составных частей. - Воронеж, ВВИУРЭ, стр.40-46). Способ позволяет снизить среднюю мощность помехи и энергопотребление передатчика. Однако способу-аналогу также присущ недостаток, связанный с отсутствием возможности создания эффективной помехи радионавигаторам группы пользователей ГНСС, находящихся в пространственно ограниченном, но известном районе.
Наиболее близким по своей технической сущности к заявляемому является способ создания преднамеренных помех по патенту РФ №2495527, МПК H04K 3/00 (2006.01), опубл. 10.10.2013 г., бюл. №28.
Способ-прототип включает в себя измерение координат собственного местоположения, определение состава орбитальной группировки глобальной навигационной спутниковой системы, используемой в заданном районе, и номера работоспособных из их числа спутников, одновременный прием сигналов с навигационными сообщениями, передаваемыми работоспособными спутниками для всех пользователей ГНСС в заданном районе, запоминание принятых сообщений, искажение в них навигационных сообщений путем их задержки на различные временные интервалы, после чего формирование суммарного помехового сигнала с искаженными навигационными сообщениями, синхронизацию суммарного помехового сигнала с мощностью, превышающей мощность легитимных сигналов спутников ГНСС, а при длительной работе - периодическое обновление раннее запомненных навигационных сообщений.
Способ-прототип обеспечивает скрытое искажение навигационных параметров для радионавигаторов группы пользователей ГНСС, находящихся в пространственно ограниченном, но известном районе. Однако названный положительных эффект носит локальный по времени характер. Перемещающиеся в запретной зоне пользователи ГНСС через некоторое время (зависящее от скорости перемещения) обнаружат деструктивное воздействие по низменности своих координат. Кроме того, в прототипе не учитываются особенности размещения радионавигаторов на различных носителях, накладывающие свои ограничения на его применение. В качестве наиболее распространенных носителей могут выступать беспилотный летательный аппарат, автомобиль или пешеход. Каждый из них имеет свою скорость перемещения, которую целесообразно учитывать при формировании имитационной помехи.
Целью данного изобретения является разработка способа создания преднамеренных помех, обеспечивающего длительное скрытое искажение навигационных параметров для радионавигаторов группы пользователей ГНСС, находящихся в пространственном ограниченном, но известном районе.
Поставленная цель достигается тем, что в известном способе создания преднамеренных помех, заключающемся в том, что измеряют координаты собственного местоположения, определяют состав орбитальной группировки ГНСС, используемой в заданном районе, и номера работоспособных из их числа спутников, одновременно принимают сигналы навигационных сообщений от работоспособных спутников для всех пользователей ГНСС в заданном районе, запоминают принятые сообщения, искажают в них навигационные сообщения путем их задержки на различные временные интервалы, после чего формируют суммарный помеховый сигнал с искаженными навигационными сообщениями, синхронизируют суммарный помеховый сигнал с сигналами навигационных сообщений спутников ГНСС, излучают суммарный помеховый сигнал с мощностью, превышающей мощность легитимных сигналов спутников ГНСС, а при длительной работе периодически обновляют ранее запомненные навигационные сообщения.
Для формирования помехового сигнала предварительно определяют классы пользователей ГНСС, точечно задают координаты ложных маршрутов и скорость движения по ним для каждого класса пользователей ГНСС, находящихся в заданном районе. В процессе работы определяют класс пользователей ГНСС1 (1 Классификация пользователей ГНСС в рамках данной работы осуществляется по скорости их перемещения в пространстве), находящихся в заданном районе. Для каждого текущего момента времени ti и соответствующей ему j-й точки назначенного ложного маршрута движения с интервалом Δt, Δt=ti-ti-1, рассчитывают необходимые задержки навигационных сообщений работоспособных спутников.
При этом ложный маршрут движения для пользователей ГНСС в заданном районе может формироваться в трехмерном пространстве по прямой под любым углом с указанием координат исходной точки, движением по спирали и любой другой математически описываемой кривой.
Перечисленная новая совокупность существенных признаков за счет того, что для пользователей различных классов формируют соответсвующие им навигационные сообщения, на основе которых принимается ложное решение о их перемещении по заданному маршруту с назначенной скоростью, позволяет достичь цели изобретения: обеспечить длительное скрытое искажение навигационных параметров для радионавигаторов группы пользователей ГНСС.
Известен ряд устройств, реализующих режим создания имитационных помех (см. патент РФ №2054806, МПК H04K 3/00, опубл. 20.02.1996 г., патент РФ №2108677, МПК H04K 3/00, опубл. 23.06.1994 г.). Они содержат устройство для создания ответных помех в составе: устройство управления и синхронизации, дешифратор, N коммутаторов каналов, устройство измерения временных интервалов, а также блок определения интенсивности передач и блок формирования временных интервалов с соответствующими связями.
Аналоги способны формировать прицельные дезинформирующие радиопомехи, согласованные с особенностями протоколов передачи информации канального уровня.
Недостаток данных устройств состоит в том, что они формируют узкополосные помехи приемным системам от имени одного источника сигналов. Известно, что навигационные сообщения спутников ГНСС передаются с использованием двойной фазовой манипуляцией BPSK в совокупности с индивидуальными модулирующими псевдослучайными последовательностями (ПСП) (см. В.С. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др. Сетевые спутниковые радионавигационные системы. Под. ред. В.С. Шебшаевича. - М.: - Радио и связь, 1993). Такие передачи могут приниматься лишь когерентно (см. Григорьев В.А. Передача сообщений по зарубежным информационным сетям - Л.: ВАС, 1989, стр.98-102). Когерентное детектирование заключается в сравнении фазоманипулированного сигнала с опорным напряжением Uoп(t), которое синхронно и синфазно с несущей и формируется обычно путем обработки самого принимаемого сигнала. В этих условиях названные помехи являются неэффективными.
Наиболее близким по своей технической сущности к заявляемому устройству создания преднамеренных помех является устройство по патенту РФ №2229198, МПК H04K 3/00, опубл. 20.05.2004 г., бюл. №14. Оно содержит приемный и передающий тракты, причем приемный тракт содержит последовательно соединенные приемную антенну, первый полосовой фильтр, второй полосовой фильтр, первый усилитель и третий полосовой фильтр, выход которого является выходом приемного тракта, передающий тракт содержит последовательно соединенные четвертый полосовой фильтр, второй усилитель, пятый полосовой фильтр, третий усилитель и передающую антенну, причем вход четвертого полосового фильтра является входом передающего тракта, и последовательно соединенные опорный генератор, четвертый усилитель, фильтр нижних частот, преобразователь частоты и второй аттенюатор, выход которого подключен ко входу передающего тракта, первый аттенюатор, вход которого подключен к выходу приемного тракта, а выход соединен со вторым входом преобразователя частоты.
Устройство-прототип обеспечивает одновременное радиоподавление группы абонентов с неизвестными номерами, находящихся в пространственно ограниченном, но известном районе, с привлечением минимальных материальных и энергетических ресурсов.
Устройство-прототип также обладает недостатком. Оно не в состоянии создать эффективную помеху радионавигаторам группы пользователей ГНСС в заданном районе. Групповой помеховый сигнал в нем оптимизирован под алгоритм работы и структуру излучений, используемых в сотовых системах связи, и является непригодным для искажения навигационного поля в заданном районе. Формирование прототипом ретранслированной помехи (сигналы всех КА задерживаются на одинаковый интервал времени) приведет к тому, что радионавигаторы определят истинные координаты местоположения пользователей ГНСС с задержкой Δt. В этих условиях внесение случайной задержки для сигналов различных КА приведет к потере способности работы радионавигаторов и к обнаружению деструктивного вмешательства.
Целью изобретения является разработка устройства создания преднамеренных помех, обеспечивающего длительное скрытое искажение навигационных параметров для радионавигаторов группы пользователей ГНСС заданного класса, находящихся в пространственно ограниченном, но известном районе.
Поставленная цель достигается тем, что в известном устройстве создания преднамеренных помех, состоящем из приемного и передающего трактов, последовательно соединенных опорного генератора и усилителя, дополнительно введены последовательно соединенные блок памяти, тракт расчета задержки сигналов КА и тракт формирования синхросигналов, причем группа информационных входов блока памяти является первой установочной шиной, а группа адресных входов - второй установочной шиной, N трактов формирования сигналов КА, сумматор и цифроаналоговый преобразователь, выход которого подключен к информационному входу передающего тракта, опорный вход которого объединен с опорным входом приемного тракта, выходом усилителя и опорным входом тракта формирования синхросигналов, выход которого соединен с управляющим входом блока памяти, входами синхронизации N трактов формирования сигналов КА, сумматора, цифроаналогового преобразователя и тракта расчета задержки сигналов КА, n-я группа информационных выходов которого, где n=1, 2, …, N, соединена с группой информационных входов n-го тракта формирования сигналов КА, первая и вторая группы информационных выходов которого соединены с соответствующими группами информационных входов сумматора, первая и вторая группы информационных выходов которого соединены с соответствующими группами информационных входов цифроаналогового преобразователя, а второй информационный вход тракта расчета задержки КА соединен с информационным выходом приемного тракта.
Заявленный способ и устройство поясняются чертежами на которых показаны:
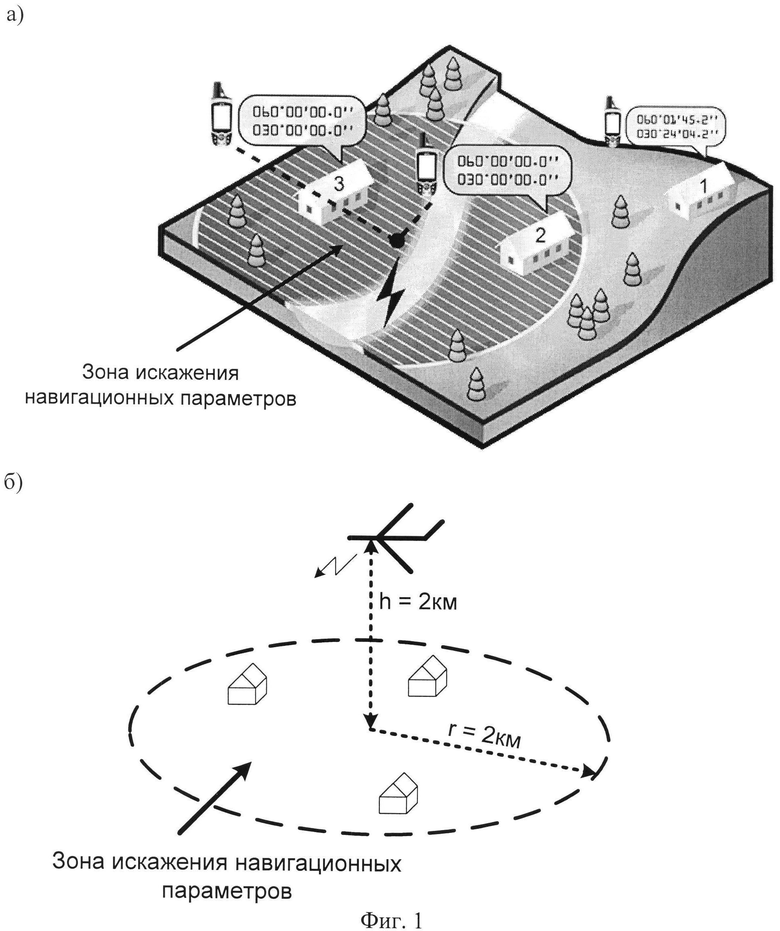
на фиг.1 - варианты размещения устройства создания преднамеренных помех:
а) на земной поверхности в центре заданного района;
б) на беспилотном летательном аппарате;
на фиг.2 - обобщенный алгоритм искажения навигационного поля;
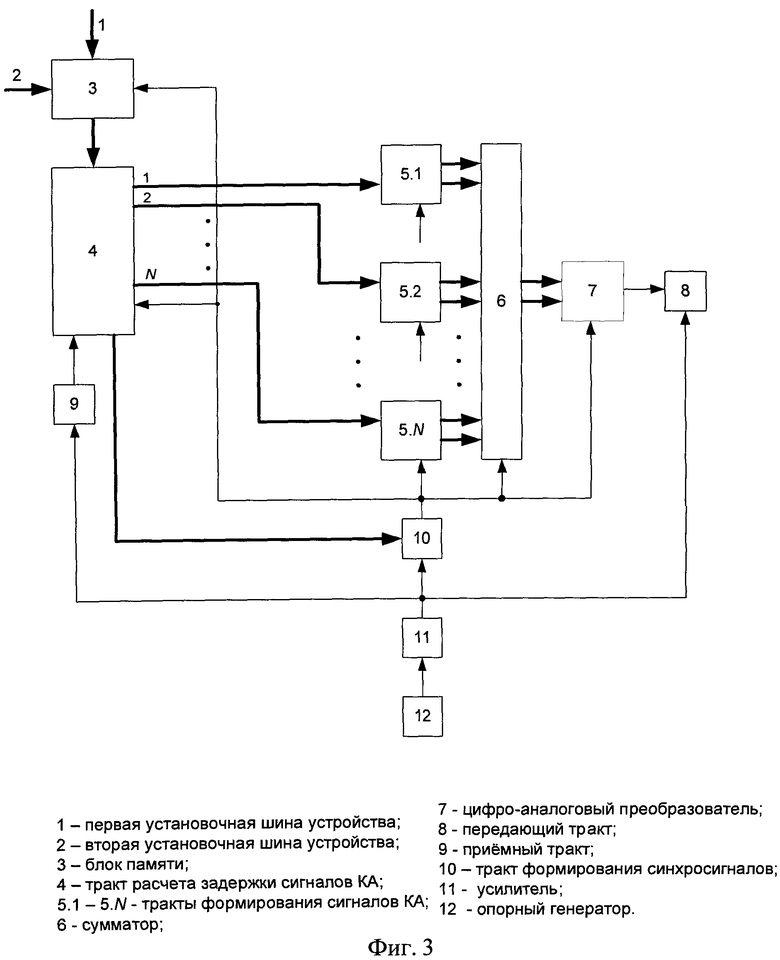
на фиг.3 - структурная схема устройства создания преднамеренных помех;
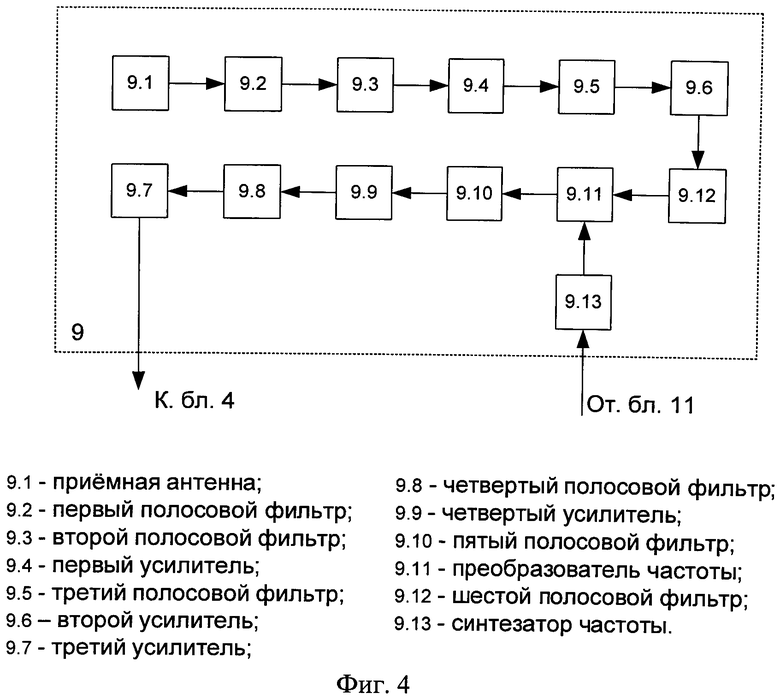
на фиг.4 - структурная схема приемного тракта;
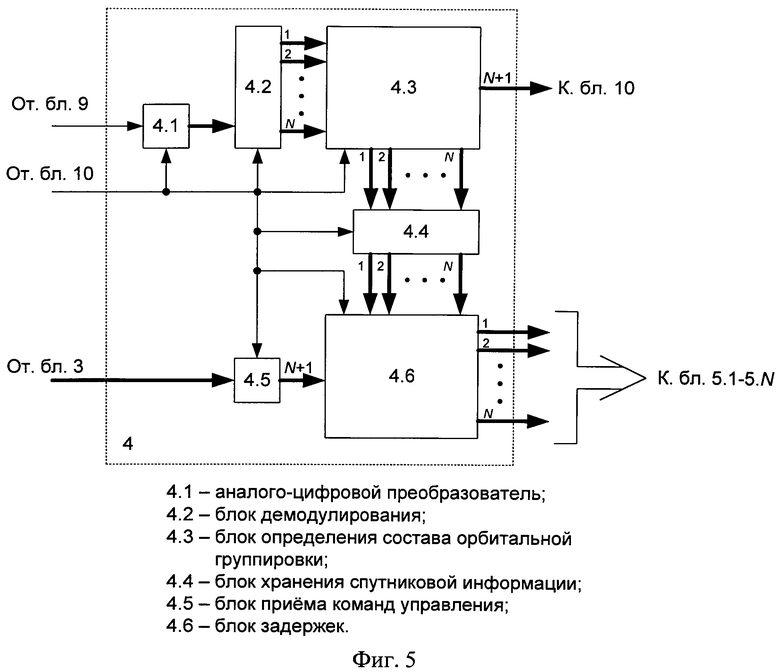
на фиг.5 - структурная схема тракта расчета задержки сигналов КА;
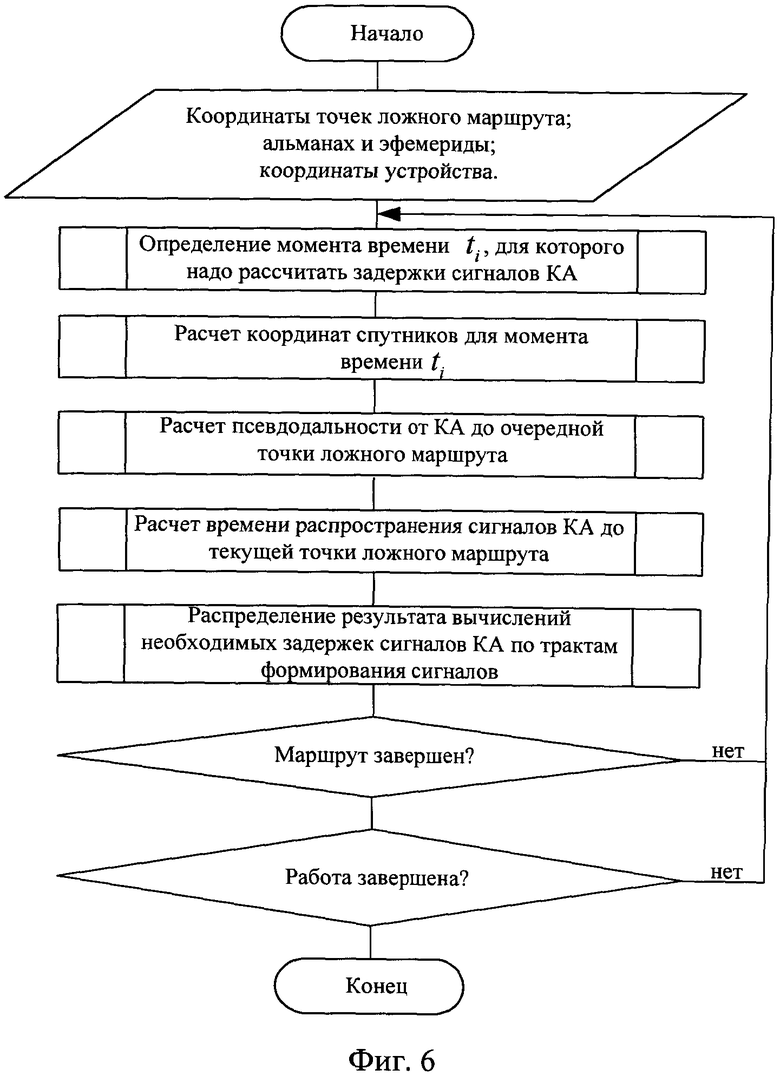
на фиг.6 - алгоритм работы тракта расчета задержки сигналов КА;
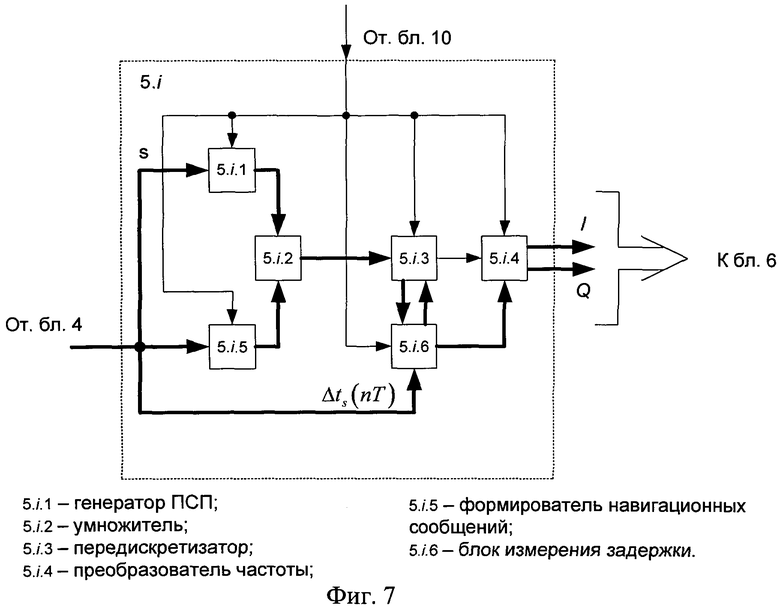
на фиг.7 - структурная схема тракта формирования сигналов КА;
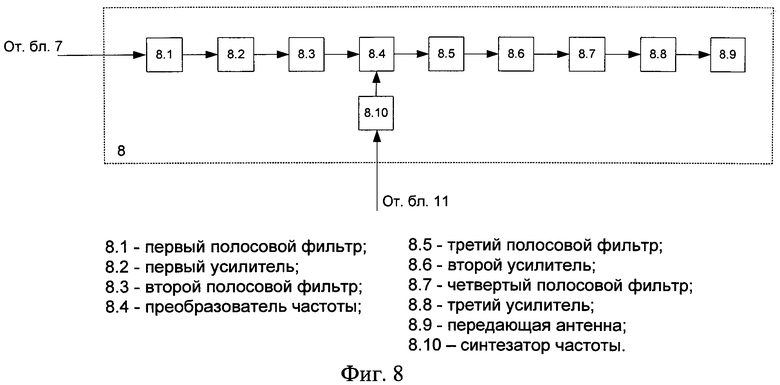
на фиг.8 - структурная схема передающего тракта;
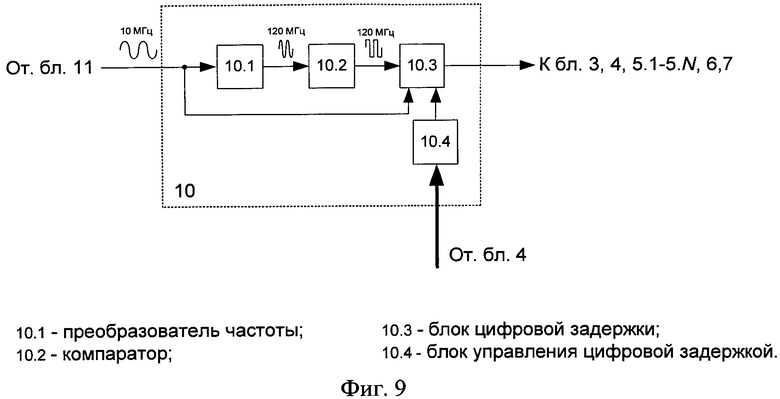
на фиг.9 - вариант реализации тракта формирования синхросигналов;
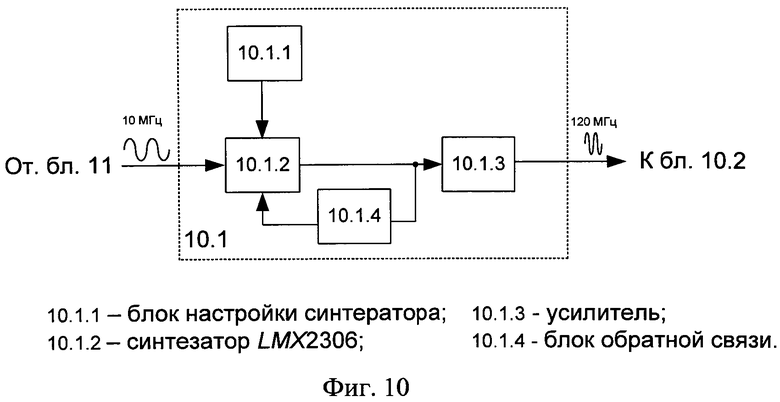
на фиг.10 - структурная схема преобразователя частоты.
Известно, что наиболее эффективным способом информационной блокады пользователей ГНСС в пространственно ограниченном районе является формирование имитационных помех. Их применение обеспечивает скрытность воздействия на радионавигаторы и не требует значительных энергетических и материальных затрат.
В предлагаемом способе и способе-прототипе используемый вид помех может быть квалифицирован как групповая ретранслированная помеха с оптимизированными по сигналам каждого спутника, определенного класса пользователей и для каждого интервала времени значениями их задержки.
Предлагаемый способ создания преднамеренных помех предполагает следующее (см. фиг.2). На подготовительном этапе задаются границы района искажения навигационных параметров. Исходя из этого определяется целесообразное местоположение источника оптимизированной помехи с учетом рельефа местности, городской застройки и т.д. В зависимости от размеров заданного района с учетом местных условий источник помех может размещаться как на земной поверхности в центре, на крыше объекта или соседнего здания, на борту беспилотного летательного аппарата (БПЛА), вертолете и т.д. (см. фиг.1).
На следующем этапе определяются координаты местоположения станции помех или ее текущее местоположение (при размещении последней на БПЛА). Данная операция может быть выполнена с использованием GPS-навигатора.
Для корректной подмены навигационных параметров далее необходимо осуществить анализ радиоэлектронной обстановки (РЭО). С этой целью собирается информация о всех космических аппаратах (КА), "видимых" в текущий момент времени в данной местности. Если условия приема навигационных сообщений КА неудовлетворительные (наблюдается менее трех спутников), необходимость в дальнейшей работе системы отпадает. В противном случае (условия РЭО удовлетворительные) осуществляют прием эфемерид всех КА и альманаха. Данная операция занимает около 15 минут. Принятое значение альманаха сохраняется до конца суток по международному времени и при повторных запусках системы используется без изменений. На его основе определяют состав орбитальной группировки и номера спутников.
Одновременно с вышерассмотренным этапом выполняют анализ заданного района на предмет доступа в него нежелательных пользователей ГНСС на различных средствах передвижения по следующим классам (группам): пешеходов, на автотранспорте (при наличии автодорог), на летательных аппаратах. Возможны и другие варианты классификации пользователей ГНСС.
Приведенная классификация в дальнейшем потребуется для задания необходимой скорости перемещения соответствующих нежелательных пользователей по сформированным для них ложным маршрутам. Количество последних соответствует или больше числа назначенных классов пользователей.
Далее определяют ложные маршруты для всех классов пользователей ГНСС. Последние целесообразно задавать дискретной последовательностью координат точек. Варьированием расстояния между точками для различных маршрутов достигается задание различных скоростей "перемещения" по ним пользователей. Удаление имитируемых маршрутов, их направление и скорость "перемещения" по ним должны несущественно отличаться от реальных, чтобы не вызвать подозрений пользователей системы.
В процессе работы определяют класс пользователей, которому искажаются навигационные сообщения, например для пешеходов. Данное решение зависит от географических, оперативных, транспортных факторов, особенностей рельефа заданного района и др. При необходимости (по результатам визуального или локационного обнаружения) искажение навигационных сигналов может быть заменено под определенные класс пользователей.
Известно, что радионавигаторы измеряют задержки распространения радиосигналов от каждого из "видимых" спутников ГНСС, координаты которых априорно известны. Эти задержки являются исходными данными для определения координат пользователя. Зная координаты, которые должен получить пользователь в текущий момент времени, рассчитывают необходимые задержки сигналов для всех "видимых" КА. В результате все приемники, принимающие суммарный сигнал, будут получать одно и то же навигационное решении вне зависимости от собственного местоположения. С помощью суммирования взаимных задержек сигналов КА осуществляют управление навигационным решением одновременно всех приемников, находящихся в заданной зоне. На основе анализа состава орбитальной группировки и номеров КА, рассчитанных необходимых задержек сигналов каждого спутника на данный момент времени формируют полные навигационные сообщения от имени всех "видимых" КА. Таким образом, в предлагаемых способе и устройстве информация от КА сохраняется неизменной, чем и объясняется скрытность работы системы. Искажению подлежат временные параметры (время поступления в радионавигаторы) передаваемых спутниками ГНСС сигналов. Следует отметить, что задержка сигналов различных КА не может быть выбрана случайно. В противном случае в радионавигаторе не будут получены координаты пользователя, а деструктивное воздействие будет обнаружено. По этой причине осуществляется расчет необходимой задержки сигналов для каждого спутника с учетом их текущего местоположения и местоположения текущей точки ложного маршрута.
Далее формируют суммарный помеховый сигнал, усиливают его и излучают.
На следующем интервале времени задержки сигналов КА меняются таким образом, чтобы радионавигаторы пользователей ГНСС получили очередную точку заданного (ложного) маршрута. Переход с точки на точку для всех классов пользователей осуществляется через одинаковые интервалы времени, например через 1 секунду. Однако за счет того, что расстояния между ними различное, достигается имитация различных скоростей движения пользователей по разным маршрутам, например: пешеходов ~3 км/час, на автотранспорте ~60 км/час, радионавигатора на БПЛА ~200 км/час. Следует отметить, что в предлагаемом способе искажение навигационных сообщений одновременно для всех классов пользователей невозможно (сохраняет свою работоспособность только для пользователей одного класса). Аналогичным образом осуществляется переход на все последующие точки ложного маршрута, выбранного для обслуживания класса пользователей ГНСС. Текущий выбор класса пользователей (ложного маршрута) осуществляет оператор системы, который принимает решение на основе имеющейся у него оперативной информации. Количество точек в ложном маршруте выбирается исходя из того, чтобы время прохождения их существенно превышало среднее время пребывания пользователей в заданной зоне. После завершения цикла имитации движения по ложному маршруту процесс повторяется с его первой точки. При вхождении нежелательного пользователя в заданную зону на экране его радионавигатора высвечиваются координаты текущей для данного момента времени точки.
В процессе работы выполняют корректировку взаимных задержек сигналов КА. Данная операция осуществляется путем измерения задержки между имитируемым и эталонным сигналами для каждого спутника ГНСС. Последнее эквивалентно измерению расстояния, на которое реально переместился соответствующий спутник в процессе работы. По результатам выполненного анализа корректируют навигационные сообщения (задержки сигналов), используемые в дальнейшей работе.
Анализ эффективности предлагаемого способа по сравнению с классическими подходами решения поставленной задачи показал, что основными его достоинствами являются:
возможность длительного скрытого искажения навигационных параметров для навигаторов группы пользователей ГНСС различных классов, находящихся в пространственно ограниченном, но известном районе;
полная согласованность структуры радиопомех и легитимных сигналов ГНСС;
минимальные энергозатраты на создание преднамеренных помех;
структурная и конструктивная простота реализации способа.
На фиг.3 приведена структурная схема предлагаемого устройства создания преднамеренных помех, реализующего заявляемый способ. Устройство содержит приемный 9 и передающий 8 тракты, последовательно соединенные опорный генератор 12 и усилитель 11.
Для обеспечения длительного скрытого искажения навигационных параметров радионавигаторам группы пользователей ГНСС заданного класса, находящихся в ограниченном, но известном районе, дополнительно введены последовательно соединенные блок памяти 3, тракт расчета задержки сигналов КА 4 и тракт формирования синхросигналов 10, причем группа информационных входов блока памяти 3 является первой установочной шиной 1, а группа адресных входов - второй установочной шиной 2, N трактов формирования сигналов КА 5.1-5.N, сумматор 6 и цифроаналоговый преобразователь 7. Выход блока 7 подключен к информационному входу передающего тракта 8, опорный вход которого объединен с опорным входом приемного тракта 9, выходом усилителя 11 и опорным входом тракта формирования синхросигналов 10. Выход блока 10 соединен с входом управления блока памяти 3, входами синхронизации N трактов формирования сигналов КА 5.1-5N, сумматора 6, цифроаналогового преобразователя 7 и тракта расчета задержки сигналов КА 4. При этом n-я группа информационных выходов тракта 4, где n=1, 2, …, N, соединена с группой информационных входов n-го тракта формирования сигналов КА 5.n, первая и вторая группы информационных выходов которого соединены с соответствующими группами информационных входов сумматора 6. Первая и вторая группы информационных выходов блока 6 соединены с соответствующими группами информационных входов цифроаналогового преобразователя 7. Второй информационный вход тракта расчета задержки сигналов КА 4 соединен с информационным выходом приемного тракта 9.
Работа устройства осуществляется следующим образом. На подготовительном этапе определяют границы района, в рамках которого будет осуществлено искажение навигационных параметров (навигационного поля). В зависимости от его размеров, а также с учетом рельефа местности, наличия производственных или иных строений и т.п. определяют место размещения устройства создания преднамеренных помех (на земле, крыше здания, БПЛА и т.д.). В случае использования БПЛА задаются маршрут и высота его полета.
На следующем этапе определяют координаты местоположения станции помех или ее текущее местоположение (при размещении последней на БПЛА). Данная операция может быть выполнена с использованием GPS-навигатора. В качестве БПЛА может быть использовано изделие "Орлан-10", выпускаемое ООО "Специальный Технологический Центр", г. Санкт-Петербург (см. Всероссийский аэрокосмический журнал "Вестник авиации и космонавтики", №3, 2010 г.; http://bla-orlan.ru).
Далее с помощью блоков 9 и 4 совместно с 11 и 12 осуществляют анализ радиоэлектронной обстановки (РЭО). С этой целью собирается информация о всех спутниках, "видимых" в текущий момент времени в данной местности. Если условия приема навигационных сообщений КА неудовлетворительные (наблюдается менее трех КА), необходимость в работе системы отпадает. При наличии удовлетворительных условий с помощью блоков 9 и 4 осуществляют прием эфемерид всех КА и альманаха. Данная операция занимает около 15 минут. Принятое значение альманаха сохраняется в блоке 4 до конца суток по международному времени и при повторных запусках системы используется без изменений. На его основе в блоке 4 определяют состав орбитальной группировки и номера работоспособных спутников. Значение эфемерид обновляется по мере старения информации в блоке 4.
Одновременно с вышерассмотренным этапом выполняют анализ заданного района на предмет доступа нежелательных пользователей ГНСС на различных средствах передвижения по следующим классам (группам): пешеходов, на автотранспорте (при наличии автодорог), на летательных аппаратах. Возможны и другие варианты классификации пользователей ГНСС. Данная работа выполняется оператором управляющим системой радиоподавления. На ее основе определяются соответствующие классам пользователей ложные маршруты и скорость перемещения по ним.
Ложные маршруты для каждого класса пользователей задаются оператором последовательностью координат точек по первой установочной шине 1, которые запоминаются в блоке памяти 3. Запись ложных маршрутов в блок 3 осуществляется по адресам, соответствующим определенному классу пользователей ГНСС. Последние поступают на установочную шину 2 устройства.
Координаты точек ложного маршрута могут определяться программно. Для этого необходимо задать цифровую карту требуемого района, координаты первой точки маршрута, расстояние между точками, математически описываемый в трехмерном пространстве порядок назначения очередных координат.
В процессе работы оператором системы определяется класс пользователей, которому необходимо исказить навигационные сообщения ГНСС. Решение принимается на основе оперативной информации, визуального или локационного обнаружения и др.
При обнаружении трех и более работоспособных КА предлагаемое устройство приступает к формированию от их имени навигационных сообщений. С помощью тракта 9 обеспечивается прием сигналов КА на частоте 1575,42 МГц в полосе 60 МГц, их усиление и фильтрация, преобразование несущей частоты (понижение до 90 МГц). Преобразование частоты в тракте 9 обеспечивается с использованием опорного сигнала блока 12, поступающего на опорный вход тракта 9 через усилитель 11.
Принятые трактом 9 и преобразованные сигналы КА поступают на второй информационный вход тракта расчета задержки сигналов КА 4. На первой группе его информационных входов присутствует информация о координатах текущей точки ложного маршрута, поступающая с выходов блока 3. Выбор ложного маршрута осуществляется оператором системы путем подачи на вторую шину 2 адреса, по которому он записан в блок 3.
В функции тракта 4 входит вычисление необходимых задержек навигационных сообщений для всех работоспособных КА N′. Кроме того, с помощью блоков 4, 5, 10, 11 и 12 осуществляют синхронизацию внутреннего времени устройства со временем навигационной системы. В результате с N′ групп выходов тракта 4, N′=3, 4, …, N′≤N, поступают соответствующие исходные данные (номер КА, требуемая задержка сигналов, а также альманах и соответствующие значения эфемерид) каждому тракту формирования сигналов КА 5.1-5.N′. На их основе трактами 5.1-5.N′ формируются необходимые полные навигационные сообщения. Каждый из N′ трактов 5 настраивается на работу с одним из работоспособных КА, и по мере необходимости на его выходе формируются навигационные сообщения.
Для установки и корректировки задержек между сигналами спутников в трактах 5 введена обратная связь между сигналами имитируемого спутника и эталонным сигналом. В качестве последнего выступают сигналы опорного генератора 12, усиленные в блоке 11 и преобразованные в тракте 10. Они выступают в качестве единого стандарта времени в предлагаемом устройстве.
Сформированные трактами 5 навигационные сообщения поступают на соответствующие группы входов сумматора 6. В функцию последнего входит объединение всех сформированных навигационных сообщений, которые далее поступают на вход цифроаналогового преобразователя 7. Преобразованный в блоке 7 суммарный помеховый сигнал с несущей частотой 90 МГц поступает на вход передающего тракта 8. В его функцию входит перенос помеховых сигналов на несущую частоту L1=1575,42 МГц, усиление до необходимого уровня и излучение в эфир. Преобразование частоты в блоке 8 (обратное преобразование) осуществляется с помощью сигналов блока 12, поступающих на опорный вход тракта 8 через усилитель 11. Синхронизация работы блоков 3-7 осуществляется импульсами (меандром) тракта 10.
С приходом очередного импульса тракта 10 на управляющий вход блока 3 на его информационные выходы поступают координаты очередной точки ложного маршрута, а дальнейшая работа устройства осуществляется по вышеописанному алгоритму.
Блок памяти 3 может быть реализован на репрограммируемых микросхемах памяти серии КС1626РФ (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю. Гордонов, Н.В. Бекин, В.В. Цыркин и др. - М.: Радио и связь, 1990. - 289 с.).
Приемный тракт 9 (см. фиг.4) предназначен для приема сигналов ГНСС "ГЛОНАС-GPS" и преобразование их на промежуточную частоту 90 МГц. Его реализация трудностей не вызывает. Все элементы и узлы из его состава известны и широко освещены в литературе. Приемный тракт 9 содержит последовательно соединенные приемную антенну 9.1, первый полосовой фильтр 9.2, второй полосовой фильтр 9.3, первый усилитель 9.4, третий полосовой фильтр 9.5, второй усилитель 9.6, третий усилитель 9.7, четвертый полосовой фильтр 9.8, четвертый усилитель 9.9, пятый полосовой фильтр 9.10, преобразователь частоты 9.11, шестой полосовой фильтр 9.12 и синтезатор частоты 9.13.
Сигналы КА ГНСС от антенны 9.1 поступают на вход первого 9.2 и далее второго 9.3 полосовых фильтров, с помощью которых обеспечивается предварительная селекция сигналов на частоте 1575,42 МГц в полосе 60 МГц. Далее сигналы следуют на вход малошумящего первого усилителя 9.4 с коэффициентом усиления (КУ) 14 дБ. После усиления сигналы КА поступают на третий ПАВ-фильтр 9.5 с полосой пропускания 60 МГц по уровню 1 дБ и затуханием в полосе 3 дБ. После этого сигналы КА поступают на вход второго усилителя 9.6 с КУ 13 дБ. Для улучшения фильтрации используют еще один шестой ПАВ-фильтр 9.12. Усиленный групповой сигнал КА ГНСС поступает на первый вход преобразователя частоты 9.11, на второй вход которого поступает опорный сигнал 1485 МГц с выхода синтезатора частоты 9.13. Работа последнего обеспечивается поступающими на его вход сигналами опорного генератора 12, с частотой 10 МГц, усиленными блоком 11. В результате блоком 9.11 выполняется преобразование принятого сигнала (несущая частота принимаемых сигналов с 1575,42 МГц понижается до 90 МГц). Блок 9.11 может быть выполнен на микросхеме ADL4350. Далее включен пятый полосовой фильтр 6-го порядка 9.10 с полосой пропускания 10 МГц, после чего стоит четвертый усилитель промежуточной частоты 9.9 с КУ 13 дБ. За ним следует четвертый полосовой фильтр 9.8 6-го порядка с полосой 10 МГц и оконечный третий усилитель 9.7 с КУ 13 дБ. На входе и выходе приемного тракта дополнительно могут быть установлены аттенюаторы для регулировки входного и выходного уровней сигнала.
Реализация элементов тракта 9 известна и трудностей не вызывает. Приемный тракт 9 в совокупности с опорным генератором 12 реализуются аналогично приемным трактам радионавигаторов (см. Garmin GPS-навигаторы 12, 12XL, 12СХ. Руководство пользователя, www.jj.connect.ru). Усилители 9.4, 9.6, 9.7 и 9.9 реализуются на микросхемах MGA58543, а ПАВ-фильтры 9.5, 9.12 - на элементах DAW15933. Дополнительное введение усилителя 11 основано на увеличении числа потребителей сигналов опорного генератора 12. К их числу относятся блоки 8 и 10.
Тракт расчета задержки сигналов КА 4 (см. фиг.5 и 6) предназначен для преобразования принятых сигналов КА ГНСС в цифровую форму, разделение суммарного цифрового потоков сигналов на сигналы отдельных спутников (путем корреляционной свертки сигналов с помощью априорно известных ПСП), демодуляцию принятых сигналов, выделение из них эфемерид и альманаха с последующим запоминанием, синхронизации блока 10 и заявляемого устройства с системой единого времени орбитальной группировки ГНСС, вычисления задержек навигационных сообщений для каждого КА, распределения исходной информации трактам 5.1-5.N с целью обеспечения формирования ими навигационных сообщений.
Тракт расчета задержки сигналов КА 4 содержит последовательно соединенные аналого-цифровой преобразователь 4.1, блок демодулирования 4.2, блок определения состава орбитальной группировки 4.3, блок хранения спутниковой информации 4.4, блок вычисления 4.6, N+1-я группа информационных входов которого соединена с группой информационных выходов блока приема команд управления 4.5, группа информационных входов которого является первой группой информационных входов тракта 4, второй информационный вход которого соединен с информационным входом аналого-цифрового преобразователя 4.1, вход синхронизации тракта 4 соединен со входами синхронизации аналого-цифрового преобразователя 4.1, блока демодулирования 4.2, блока определения состава орбитальной группировки 4.3, блока приема команд управления 4.5, блока вычисления 4.6 и блока хранения спутниковой информации 4.4, группа информационных выходов блока определения состава орбитальной группировки 4.3 является группой выходов синхронизации тракта 4, а с первой по N-ю группы информационных выходов блока вычисления 4.6 являются соответствующими группами информационных выходов тракта 4.
Работа тракта 4 осуществляется следующим образом. Принятый трактом 9 групповой аналоговый сигнал поступает на вход аналого-цифрового преобразователя 4.1. Преобразованный в цифровую форму суммарный навигационный сигнал КА далее поступает на группу входов блока демодулирования 4.2. В его функции входит корреляционная свертка сигналов на основе априорно известных индивидуальных ПСП КА с последующей их демодуляцией. Порядок выполнения этих операций подробно рассмотрен в патенте РФ №2419106, МПК G01S 13/46, опубл. 20.05.2011 г., бюл. №14. На N группах информационных выходов блока 4.2 формируются навигационные сообщения от КА, отмеченных в работе. Последние поступают на соответствующие группы информационных входов блока определения состава орбитальной группировки 4.3. В функции этого блока входит:
выделение из навигационных сообщений КА эфемерид и альманаха для их последующего запоминания в блоке 4.4;
формирование коэффициентов для коррекции времени КА (определения внутрисистемного времени ГНСС), значение которого поступает на группу входов управления блока 10;
определение номеров работоспособных КА, в соответствии с которыми далее осуществляется запись эфемерид и альманаха в блок 4.4.
Блок вычисления 4.6 предназначен для определения расстояний Rs от заданной блоком 3 имитируемой точки до всех S работающих КА на протяжении заданного интервала времени и на основе этой информации вычисления необходимых значений задержек навигационных сообщений для каждого КА.
Расстояние Rs от заданной в данный момент времени точки до S-го спутника определяется из выражения

где t - текущий момент времени; x, y, z - координаты имитируемой точки, xs(t), ys(t), zs(t) - координаты s-го спутника, s=3, 4, 5, …, N, в момент времени t. Значения {x, y, z} априорно известны, а величины {xs(t), ys(t), zs(t)} рассчитывают с использованием стандартного алгоритма через эфемериды (см. Understanding GPS. Principles and Applications. ARTECH HOUSE, London, 2006; Ященков В.С. Основы спутниковой навигации. - М.: Горячая линия - Телеком. 2005 г.). Таким образом, основной функцией блока 4.6 является расчет функции Rs(t) в заданном интервале времени для всех s работающих КА. На основе значений Rs(t) определяют необходимые задержки навигационных сообщений для работоспособных спутников

где c - скорость света.
Величины Rs(t) удобно использовать в дискретном виде (с определенным шагом). В этом случае непрерывный аргумент t преобразуется в дискретный nT, где n - номер дискрета (целое число), Т - шаг имитации по времени. В дискретном виде выражение (1) принимает вид

Величина Т определяется требованиями к точности имитации по времени и аппаратурным возможностям. Значения функции Rs(nT) могут рассчитываться на период времени нахождения пользователей ГНСС на каждой точке и сохраняться в памяти блока 4.6 либо рассчитываться в реальном масштабе времени по мере необходимости, так как сама процедура расчета не является ресурсоемкой. Рассчитанные блоком 4.6 значения задержек Δts навигационных сообщений совместно с навигационными сообщениями поступают на соответствующие группы информационных выходов тракта 4. Синхронность работы всех элементов тракта 4 обеспечивают сигналы тракта формирования синхросигналов 10.
Реализация элементов тракта 4 известна и трудностей не вызывает. Аналого-цифровой преобразователь 4.1 может быть изготовлен по известной схеме (см http://www.linear.com/product/LTC2208). Блок демодулирования 4.2 содержит блок памяти и N трактов обработки, каждый из которых состоит из последовательно соединенных коррелятора и демодулятора. В блоке памяти содержатся априорно известные значения ПСП для всех КА ГНСС. Реализация аналогична соответствующим блокам устройства определения координат источника радиоизлучения по патенту РФ №2419106.
Блок определения состава орбитальной группировки 4.3 может быть выполнен набором из N регистров заданной длины, в которые записываются навигационные сообщения соответствующих КА. Информация о эфемеридах и альманахе снимается с соответствующих разрядов регистров и поступает на входы блока 4.4. Аналогично информация о коэффициентах для коррекции времени поступает на группу выходов синхронизации тракта 4.
Блок хранения спутниковой информации 4.4 и блок приема команд управления 4.5 представляют собой буферные запоминающие устройства, реализация которых трудностей не представляет.
Блок вычисления 4.6 предназначен для расчета местоположения КА {xs(t), ys(t), zs(t)}, определения расстояния Rs(t) между КА и очередной точкой ложного маршрута в пространстве, выбранной для имитации, и нахождения необходимых задержек навигационных сообщений (выражение 2). Реализация блока 4.6 трудностей не вызывает. Может быть выполнен в виде автомата на базе 16-разрядного микропроцессора К1810ВМ86, алгоритм работы которого представлен на фиг.6.
В трактах 5.1-5.N (см. фиг.7) на основе поступившей из тракта 4 информации о номерах работоспособных КА, их эфемеридах и альманахе, найденных значениях необходимых задержек Δts осуществляют формирование информационных сообщений КА. Каждый из трактов 5.1-5.N настраивают на один из состава группировки КА. В случае если реальная группировка содержит менее N КА, то незанятые тракты в работе не участвуют.
Каждый тракт формирования сигналов КА 5.i содержит последовательно соединенные генератор ПСП 5.i.1, умножитель 5.i.2, передискретизатор 5.i.3, блок измерения задержки 5.i.6, преобразователь частоты 5.i.4, причем вторая группа информационных входов умножителя 5.i.2 соединена с группой информационных выходов формирователя навигационных сообщений 5.i.5, группа информационных входов которого объединена с группой информационных входов генератора ПСП 5.i.1 и второй группой информационных входов блока измерения задержки 5.i.6 и является группой информационных входов i-го тракта формирования сигналов КА 5.i, вторая группа информационных входов передискретизатора 5.i.3 соединена со второй группой информационных выходов блока измерения задержки 5.i.6, а вторая группа информационных выходов передискретизатора 5.i.3 соединена со второй группой информационных входов третьего преобразователя частоты 5.i.4, первая и вторая группы информационных выходов которого являются первой и второй группами информационных выходов тракта формирования сигналов КА 5.i, вход синхронизации которого объединен с входами синхронизации генератора ПСП 5.i.1, умножителя 5.i.2, передискретизатора 5.i.3, преобразователя частоты 5.i.4, формирователя навигационных сообщений 5.i.5 и блока измерения задержки 5.i.6.
С помощью трактов 5.1-5.N в каждый момент времени nT формируются навигационные сообщения КА с таким доплеровским смещением частоты модуляции кода и частоты несущей, которые позволяют через интервал времени Т получить расчетную псевдодальность (расстояние) Rs(nT+T).
Управление частотой модуляции кода осуществляют с помощью передискретизатора 5.i.3 (с переменным коэффициентом изменения частоты), а управление несущей частотой - с помощью цифрового преобразователя частоты 5.i.4. На основе исходной информации о КА, поступившей с группы выходов тракта 4, в блоке 5.i.5 формируют навигационное сообщение. Одновременно информация о номере спутника s поступает на вход генератора ПСП 5.i.1. В памяти последнего содержится априорно известные ПСП на все КА ГНСС. В соответствии с принятым номером s КА на группе выходов блока 5.i.1 формируется соответствующая ПСП, которая поступает на первую группу информационных входов умножителя 5.i.2. На вторую группу его информационных входов поступает навигационное сообщение от имени s-спутника.
Известно, что точность установки модулирующего сигнала конечна, что влечет со временем накопление ошибки. В общем случает при отсутствии выполнения операции синхронизации предлагаемое устройство сохраняет работоспособность. При переходе пользователя из легитимной зоны в район с искаженными навигационными сообщениями и обратно произойдут кратковременные сбои в работе радионавигатора. Для решения этой проблемы в тракты 5.1-5.N введена обратная связь, реализованная с помощью блоков 5.i.3 и 5.i.6. Кроме того, в задачу тракта формирования синхросигналов 10 входит формирование высокостабильного меандра с частотой следования 120 МГц. Фаза следования импульсов должна максимально быть приближена к фазе сигналов единого стандарта времени космической группировки ГНСС. Подстройку фазы меандра тракта 10 осуществляют сигналы тракта 4.
Блок измерения задержки 5.i.6 генерирует сигнал с частотой 1.023 МГц (номинальной частотой блока 5.i.1), который синхронизируется блоками 12 и 10. Наличие этого колебания позволяет измерять в блоке 5.i.3 текущую задержку между имитируемым блоком 5.i.2 навигационным сообщением КА и эталонным сигналом в блоке 5.i.6. Измеренная разность Δts из блока 5.i.3 поступает на первую группу информационных входов блока 5.i.6, в котором выполняют ее сравнение с расчетными (в тракте 4) значениями. Последние поступают на вторую группу информационных входов блока 5.i.6 с группы информационных входов тракта 5.i. В блоке 5.i.6 определяется необходимая поправка к значениям доплеровского смещения частоты, которая учитывается в блоке 5.i.4. Данный подход позволяет удерживать временные погрешности при формировании псевдопоследовательностей трактов 5 в заданных пределах. На первой и второй группах информационных выходов блока 5.i.4 формируются квадратурные составляющие навигационного сигнала соответствующего КА. Следует отметить, что сигналы опорного генератора 12 и тракта формирования синхросигналов 10 являются общими для всех трактов 5 и несут функцию единого стандарта времени в предлагаемом устройстве.
Реализация элементов трактов 5 широко освещена в литературе и трудностей не вызывает. Блоки с 5.i.1 по 5.i.6 могут быть выполнены на элементарной логике ТТЛ-уровней сигналов, например 555 или 1533 сериях микросхем. Реализация генератора ПСП 5.i.1 приведена на страницах 491-497 (см. Шевкопляс Б.В. Микропроцессорные структуры. Инженерные решения. Справочник. - 2-е изд. перераб. и доп. - М.: Радио и связь, 1990. - 512 с.).
Полученные в трактах 5 имитируемые сигналы КА складывают в цифровом сумматоре 6, работающем на высокой частоте дискретизации (не менее 100 МГц) и дающем ошибку сложения не более 10 нс. Смесь сигналов от всех имитируемых КА поступает на группы входов квадратурных составляющих цифроаналогового преобразователя 7 и далее на передающий тракт 8 (см. фиг.8). Блок 7 может быть реализован на микросхеме DAC5687 фирмы Texas Instruments.
Передающий тракт 8 содержит последовательно соединенные первый полосовой фильтр 8.1, первый усилитель 8.2, второй полосовой фильтр 8.3, преобразователь частоты 8.4, третий полосовой фильтр 8.5, второй усилитель 8.6, четвертый полосовой фильтр 8.7, третий усилитель 8.8, передающую антенну 8.9, и синтезатор частоты 8.10. Передающий тракт предназначен для предварительной фильтрации и усиления группового имитационного сигнала (блоки 8.1 и 8.3), переноса группового сигнала на частоту 1575.42 МГц (блоки 8.4 и 8.10), фильтрации и основного усиления (блоки 8.5-8.8). В качестве усилителей 8.2, 8.6 и 8.8 могут быть использованы микросхемы MGA58543 с КУ, равным 13 дБ. В качестве преобразователя частоты 8.4 может быть использована микросхема SYM-18H, а в качестве фильтров 8.2, 8.3, 8.5 и 8.7 - ПАВ-фильтры, например DAW159.33. Синтезатор частоты 8.10 предназначен для преобразования опорного напряжения 10 МГц блока 12 в напряжение с частотой 1485 МГц.
Опорный генератор 12 предназначен для формирования высокостабильного аналогового сигнала с частотой 10 МГц и может быть выполнен с применением DDS-синтезатора с микроконтроллером записи частоты гетеродина: ГЛОНАС-1512 МГц, GPS - 1485 МГц. С выхода синтезатора сигнал с уровнем - 4 дБ поступает на усилитель 11 с КУ 14 дБ и далее на вход формирования синхроимпульсов 10.
В функции тракта 10 входит формирование высокостабильного сигнала (меандра) с частотой 120 МГц, корректируемого управляющими сигналами (коэффициентами), поступающими с группы выходов синхронизации тракта 4.
В процессе разработки и изготовления устройства создания преднамеренных помех было опробовано несколько схем изготовления тракта 10. В качестве основного выбран вариант его изготовления на основе управляемой линии задержки, который приведен на фиг.9. В качестве компаратора использована микросхема ADCMP551 фирмы Analog Devices (http://www.analog.com/static/imported-files/data_sheets/ADCMP551_552.pdf). Блок цифровой управляемой задержки реализуется на микросхеме DS1020 Dallas Semiconductor (см. http://datasheets.maximintegrated.com/en/ds/DS1020.pdf). Блок управления цифровой задержкой предназначен для обеспечения плавного изменения задержки. Недостаток микросхемы DS1020 состоит в том, что она может сформировать задержку не более 520 нс. Недостаток устраняется последовательным подключением нескольких таких микросхем, что приводит к некоторому усложнению тракта 10.
На фиг.10 представлена структурная схема преобразователя частоты. В качестве синтезатора частоты используется модуль ZMY2306 фирмы Texas Instruments (см. http://www.ti.com/lit/ds/snas016f/snas016f.pdf).
С целью повышения быстродействия устройства, уменьшения массогабаритных характеристик и потребляемой электроэнергии (что актуально при размещении устройства на борту БПЛА), повышения его надежности блоки 3, 4, 5 и 6 целесообразно реализовать на процессоре цифровой обработки DSP TMS320c6455 (см. http://www.compel.ru) в совокупности с микросхемой FPGA Virtex XC4SX35 (блоки 7-8) (см. там же). В этом случае вся обработка выполняется цифровыми методами в едином специализированном цифровом процессоре. На цифроаналоговый преобразователь поступает сигнал, полностью соответствующий по структуре имитируемому навигационному полю. При этом для синхронизации работы элементов всего устройства достаточно всего одного опорного генератора. Все необходимые внутренние частоты реализуют с помощью операции передискретизации сигналов на базовую опорную частоту. Такое построение серьезно удешевляет аппаратную часть за счет некоторого усложнения программной части.
Изготовлено устройство на базе БПЛА "Орлан-10" в соответствии с заявляемым способом изобретения, которое успешно прошло полевые испытания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2012 |
|
RU2495527C1 |
| УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2525299C1 |
| УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ ГЛОБАЛЬНЫМ НАВИГАЦИОННЫМ СПУТНИКОВЫМ СИСТЕМАМ | 2024 |
|
RU2828474C1 |
| Способ создания ретранслированных помех | 2018 |
|
RU2696002C1 |
| Способ и устройство определения угловой ориентации летательных аппаратов | 2020 |
|
RU2740606C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2371733C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| Способ создания имитирующих радиопомех помехоустойчивой навигационной аппаратуре потребителей глобальной навигационной спутниковой системы | 2024 |
|
RU2840958C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2514197C1 |
| Способ помехозащищенного приема сигналов систем спутниковой связи | 2020 |
|
RU2738409C1 |
Изобретения относятся к области радиотехники и может быть использовано для создания преднамеренных помех в заданном районе глобальной навигационной спутниковой системе (ГНСС). Техническим результатом является продолжительное скрытое искажение навигационных параметров радионавигаторам группы пользователей, находящихся в пространственно ограниченном, но известном районе. Способ создания преднамеренных помех заключается в том, что измеряют координаты собственного местоположения, определяют состав орбитальной группировки глобальной навигационной спутниковой системы (ГНСС), используемой в заданном районе, и номера работоспособных в нем спутников, одновременно принимают сигналы навигационных сообщений от работоспособных спутников для всех пользователей ГНСС в заданном районе, запоминают принятые сообщения, искажают в них навигационные сообщения путем их задержки на различные временные интервалы, после чего формируют суммарный помеховый сигнал с искаженными навигационными сообщениями, синхронизируют суммарный помеховый сигнал с сигналами навигационных сообщений спутников ГНСС, излучают суммарный помеховый сигнал с мощностью, превышающей мощность легитимных сигналов спутников ГНСС, а при длительной работе периодически обновляют ранее запомненные навигационные сообщения, при этом для формирования помехового сигнала предварительно определяют классы пользователей ГНСС, точечно задают координаты ложных маршрутов и скорость движения по ним для каждого класса пользователей ГНСС, а в процессе работы определяют класс пользователей ГНСС, находящихся в заданном районе, для каждого текущего момента времени ti и соответствующей ему j-й точки назначенного ложного маршрута движения с интервалом Δt, Δt=ti-ti-1, рассчитывают необходимые задержки навигационных сообщений для каждого работоспособного спутника ГНСС. 2 н. и 1 з.п. ф-лы, 10 ил.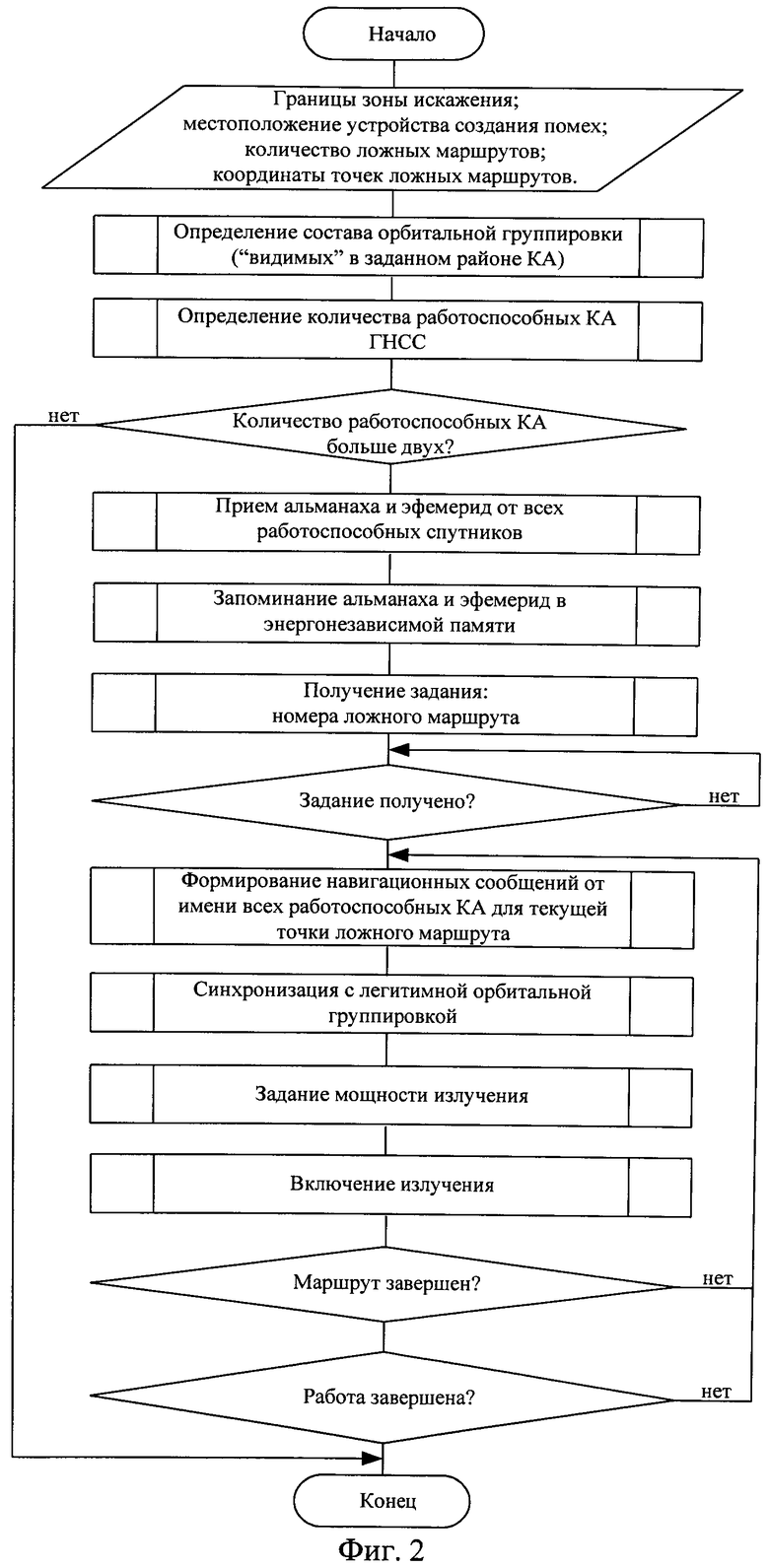
1. Способ создания преднамеренных помех, заключающийся в том, что измеряют координаты собственного местоположения, определяют состав орбитальной группировки глобальной навигационной спутниковой системы (ГНСС), используемой в заданном районе, и номера работоспособных в нем спутников, одновременно принимают сигналы навигационных сообщений от работоспособных спутников для всех пользователей ГНСС в заданном районе, запоминают принятые сообщения, искажают в них навигационные сообщения путем их задержки на различные временные интервалы, после чего формируют суммарный помеховый сигнал с искаженными навигационными сообщениями, синхронизируют суммарный помеховый сигнал с сигналами навигационных сообщений спутников ГНСС, излучают суммарный помеховый сигнал с мощностью, превышающей мощность легитимных сигналов спутников ГНСС, а при длительной работе периодически обновляют ранее запомненные навигационные сообщения, отличающийся тем, что для формирования помехового сигнала предварительно определяют классы пользователей ГНСС, точечно задают координаты ложных маршрутов и скорость движения по ним для каждого класса пользователей ГНСС, а в процессе работы определяют класс пользователей ГНСС, находящихся в заданном районе, для каждого текущего момента времени ti и соответствующей ему j-й точки назначенного ложного маршрута движения с интервалом Δt, Δt=ti-ti-1, рассчитывают необходимые задержки навигационных сообщений для каждого работоспособного спутника ГНСС.
2. Способ по п. 1, отличающийся тем, что ложный маршрут движения для пользователей ГНСС в назначенном районе формируют в трехмерном пространстве по прямой под заданным углом с указанием координат исходной и конечной точек, движением по спирали и любой другой математически описываемой кривой.
3. Устройство создания преднамеренных помех, содержащее приемный и передающий тракты и опорный генератор, выход которого подключен к входу усилителя, отличающийся тем, что дополнительно введены последовательно соединенные блок памяти, тракт расчета задержки сигналов космических аппаратов (КА) и тракт формирования синхросигналов, причем группа информационных входов блока памяти является первой установочной шиной и предназначена для задания ложных маршрутов пользователей, а группа адресных входов - второй установочной шиной, предназначенной для задания классов пользователей, N трактов формирования сигналов КА, предназначенных для формирования информационных сообщений от имени соответствующих КА, сумматор и цифроаналоговый преобразователь, выход которого подключен к информационному входу передающего тракта, опорный вход которого объединен с опорным входом приемного тракта, выходом усилителя и опорным входом тракта формирования синхросигналов, выход которого соединен с управляющим входом блока памяти, входами синхронизации N трактов формирования сигналов КА, сумматора, цифроаналогового преобразователя, тракта расчета задержки сигналов КА, n-ая группа информационных выходов которого, где n=1, 2, …, N, соединена с группой информационных входов n-го тракта формирования сигналов КА, на первой и второй группах информационных выходов которого формируются квадратурные составляющие навигационного сигнала от имени n-го КА, соединенные с соответствующими группами информационных входов сумматора, на первой и второй группах информационных выходов которого формируются квадратурные составляющие смеси навигационных сигналов от N имитируемых КА, соединенные с соответствующими группами информационных входов цифроаналогового преобразователя, а второй информационный вход тракта расчета задержки сигналов КА соединен с информационным выходом приемного тракта.
| СПОСОБ И УСТРОЙСТВО РАДИОПОДАВЛЕНИЯ КАНАЛОВ СВЯЗИ | 2002 |
|
RU2229198C1 |
| US 20080001818 A1, 17.07.2008 | |||
| Устройство для отпуска определенного количества доз жидкостей, например молока | 1957 |
|
SU113019A1 |
| МНОГОКАНАЛЬНЫЙ ПЕРЕДАТЧИК РАДИОПОМЕХ | 2011 |
|
RU2479919C1 |
| Электропривод постоянного тока | 1982 |
|
SU1045344A1 |
| СПОСОБ СОЗДАНИЯ РЕТРАНСЛИРОВАННЫХ ПОМЕХ | 1994 |
|
RU2123238C1 |
| US 20110275308 А1, 10.11.2011 | |||
| Способ и устройство для разделения минералов по крупности и удельному весу | 1956 |
|
SU113620A2 |
| Автоматический регулятор расстояния от резака до поверхности изделия | 1959 |
|
SU127903A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАВИГАЦИОННЫХ СИСТЕМ | 2006 |
|
RU2385470C1 |
| РАДЗИЕВСКИЙ В.Г | |||
| Сетецентрическая пространственно-распределенная | |||

